
Cooperative Stereo-Zoom Matching for Disparity Computation
Bo-Yang Zhuo and Huei-Yung Lin
Department of Electrical Engineering, National Chung Cheng University, Chiayi 621, Taiwan
Keywords:
Stereo Matching, Zooming, Disparity, Optical Zoom.
Abstract:
This paper investigates a stereo matching approach incorporated with the zooming information. Conventional
stereo vision algorithms take one pair of images for correspondence matching, while our proposed method
adopts two zoom lens cameras to acquire multiple stereo image pairs with zoom changes. These image se-
quences are able to provide more accurate results for stereo matching algorithms. The new framework makes
the rectified images compliant with the zoom characteristics by the definition of the relationship between
the left and right images. Our approach can be integrated with existing stereo matching algorithms under
some requirements and adjustments. In the experiments, we test the proposed framework on 2014 Middle-
bury benchmark dataset and our own zoom image dataset. The results have demonstrated the improvement of
disparity computation of the our technique.
1 INTRODUCTION
Stereo vision for machine perception is to simulate
the human visual system. When an object is closer to
the observer, the disparity between the left and right
eyes becomes larger. With this property, the stereo
vision problem can be simplified as finding the cor-
responding points within an image pair. This is an
important topic in computer vision, and aims to pro-
vide the disparity maps from the depth computation
of 3D scenes or objects. In the past few decades,
stereo matching techniques have been extensively in-
vestigated by computer vision researchers and practi-
tioners. Since the availability of Middlebury stereo
datasets (Scharstein and Szeliski, 2002) and pub-
lic benchmarks, many sophisticated algorithms have
been proposed and evaluated for the objective of de-
creasing the mismatching rate. Nevertheless, most ap-
proaches take standard rectified image pairs as inputs
and do not consider the image acquisition process of
a real camera system.
The image pair captured by a conventional stereo
vision system consists of two images taken from two
different cameras. This imaging model forms the two-
view geometry and the point correspondence relation
between the two images is restricted by the epipolar
constraint (Hartley and Zisserman, 2004). For con-
venience, the image pairs are commonly rectified so
that the epipolar lines are parallel to the image scan-
lines. The stereo matching can then be carried out ef-
ficiently along the one-dimensional image scanlines
at the cost of rectification computation and image
warping. Since most existing stereo matching algo-
rithms work on rectified image pairs and do not con-
sider the image rectification step, the investigation is
commonly focused on the matching cost rather than
the development and evaluation of the overall stereo
vision system.
In general, there are four steps adopted in stereo
matching algorithms: cost initialization, cost aggre-
gation, disparity selection and refinement. The cost
initialization is a process to calculate the similarity
at the pixel level, such as the absolute difference or
cross correlation, etc. Since the cost calculated by
a pixel is not reliable, the cost aggregation consid-
ering a specific region is carried out to increase the
robustness (Hosni et al., 2011). The disparity selec-
tion usually adopts the winner-takes-all (WTA) strat-
egy which finds the lowest cost for the result. Alter-
natively, an image scaling approach with multi-block
matching and sub-pixel estimation can be used to re-
duce the error rate (Chang and Maruyama, 2018). The
refinement process aims to improve the reliability us-
ing some techniques such as the left-right consistency,
matching confidence, median filter, speckle filter, and
ground control points, etc.
The stereo vision research in recent years is di-
vided into two categories, the speed-oriented and
precision-oriented approaches. The speed-oriented
techniques concern about the computational effi-
Zhuo, B. and Lin, H.
Cooperative Stereo-Zoom Matching for Disparity Computation.
DOI: 10.5220/0008877001570164
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
157-164
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
157

image
pre-processing
Get two
image pairs
Reliable point
or not
Remain stereo
matching results
Zoom matching
Getting Stereo
matching results
No
Yes
Cost aggregetion
Produce
disparity map
Figure 1: The system flowchart of the proposed cooperative zoom-stereo framework for disparity computation.
ciency and consider the porting to hardware depen-
dent platforms such as FPGA, GPU, etc. (Chang and
Maruyama, 2018). On the other hand, the objective of
precision-oriented techniques is to increase the cor-
rectness of stereo matching results. In some recent
works, possible surface structures are used to improve
the accuracy (Park and Yoon, 2019), Kim and Kim
use the texture and edge information as the smooth-
ness constraints (Kim and Kim, 2016). In (Batsos
et al., 2018), various input scales, masks and cost
calculation methods are combined to make the algo-
rithms more robust. Moreover, learning based tech-
niques for stereo matching have shown significant
progress in the past few years. In (
ˇ
Zbontar and Le-
Cun, 2016), a method is proposed to learn a similar-
ity measure on small image patches using the con-
volutional neural network, and evaluating on KITTI
and Middlebury datasets. Seki et al. present a learn-
ing based penalties estimation method to derive the
parameters of the widely used semi-global matching
algorithm (Seki and Pollefeys, 2017). Cheng and
Lin present a matching technique based on image
bit-plane slicing and fusion (Cheng and Lin, 2015).
The bit-plane slices are used to find stereo correspon-
dences and then combined for the final disparity map.
These techniques have successfully reduced the cor-
respondence matching error, but at the cost of more
sophisticated hardware requirement.
In this work, a pair of zoom lens cameras are used
to capture the stereo image pairs with various focal
length settings (Chen et al., 2018). The existing or
newly developed stereo matching algorithms can be
incorporated with the proposed zoom-stereo frame-
work. A zoom rectification method is presented to
reduce the zoom image correspondence search range.
We aggregate the matching cost of stereo and zoom
images to mitigate the unreliable matching. Our ap-
proach is able to improve the correspondence search
results with the additional zooming constraint, and
provides a robust disparity reliability check. Figure
1 shows the system flowchart of the proposed stereo
with zooming technique. Two or more stereo image
pairs with various zoom factors are first taken with
different focal length settings. An initial disparity
computation is first carried out by the stereo image
pair acquired with the same focal length. A series of
zoom images captured from the same camera is used
for zoom matching, which is a process to identify the
point correspondences among the zoom images. The
cost aggregation combining the matching from stereo
and zoom is then performed to refine the disparity
map.
2 THE APPROACH
2.1 Zoom-Stereo Framework
The scale of a scene or an object appeared in the im-
age is determined by the focal length of the camera or
the zoom factor. A vector defined by the image center
and a specific point can be used to illustrate the phe-
nomenon when the focal length is changed. An ideal
zoom model can be described by the equation
|v
i
|
f
i
=
|v
j
|
f
j
and v
j
= λv
i
(1)
where v
i
and v
j
are the zoom vectors originated from
the principal point (or the image center), and λ is the
focal length ratio f
j
/ f
i
.
Normally, there are two types of zoom images,
one derived from digital zoom and the other acquired
with optical zoom. The former is synthesized by up-
or down-sampling the original image with interpola-
tion, and thus no additional information is generated
when magnified. The optical zoom, on the other hand,
involves the actual lens movement, and the zoom im-
ages are captured with independent samples. In this
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
158
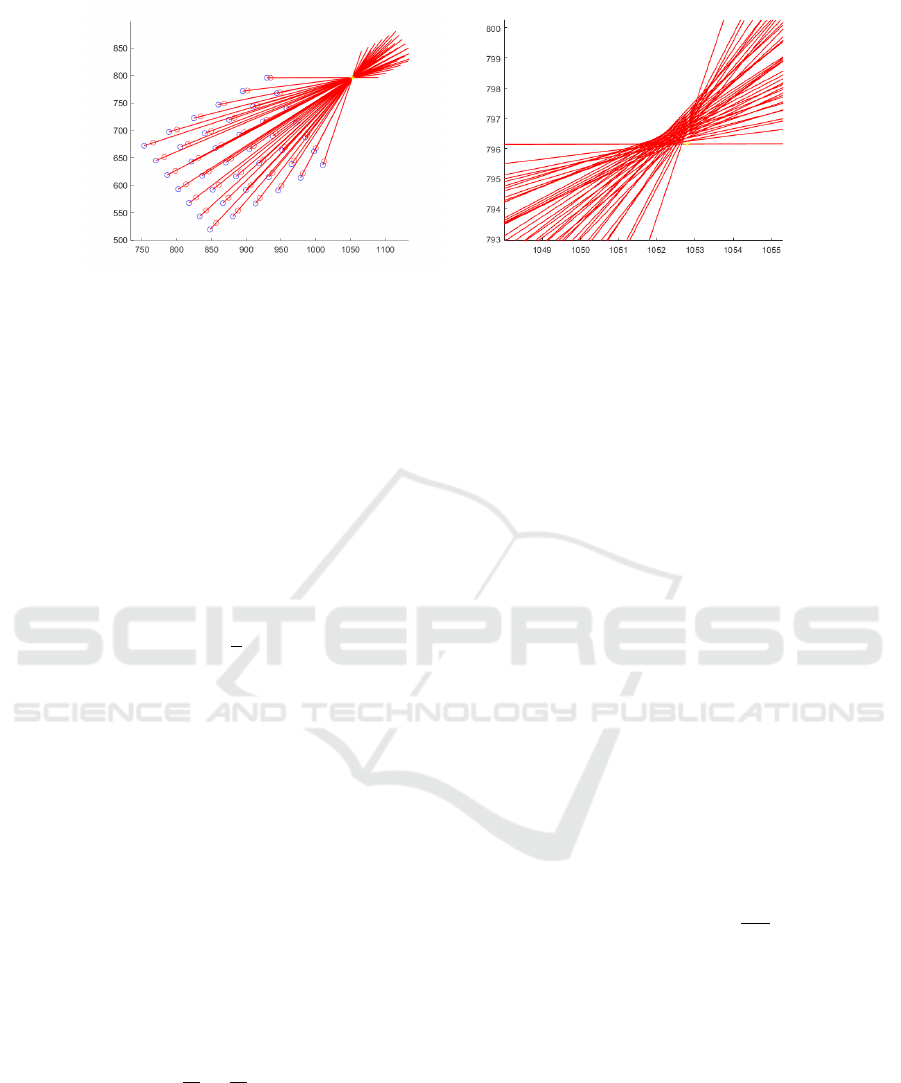
(a) Ideal zoom (b) Optical zoom
Figure 2: The red lines are connected by the same correspondences appeared in different zooms. The yellow dot is the image
center obtained from calibration.
work, the focus length is changed to acquire the zoom
images for stereo matching. One difficulty of optical
zoom is the change of principle point along with the
change of focus length. As illustrated in Figure 2, the
zoom vectors do not converge to a single point due to
the non-ideal lens movement of a real camera system
with optical zoom (see Figure 2(b)). This is different
from ideal case used in digital zoom (see Figure 2(a)).
In a conventional stereo vision system, the dis-
tance z of a scene point is given by
z = f
b
d
where f is the focal length of the camera, b is the
stereo baseline, and d is the stereo disparity. The
stereo baseline and focal length can be obtained by
camera calibration and used to check the disparity re-
liability by the left-right consistency (Jie et al., 2018).
Notice that a pair of zoom lens cameras is used in our
system, and several stereo image pairs are captured
at a fixed location. Since the distance between the
camera and the scene does not change, additional ge-
ometric constraints can be constructed for the image
pairs. In a real camera system, the principal point will
change due to zooming (i.e., when the focal length is
adjusted). Thus, we also need to consider the base-
line change for cooperative stereo and zoom match-
ing. For a conventional stereo system setting, the dis-
parity is proportional to the stereo baseline. The re-
striction can be formulated as
d
i
d
j
=
b
i
b
j
(2)
where i and j represent different zoom positions for
image acquisition.
2.2 Disparity Reliability Check
For reliable stereo matching results, we need to iden-
tify the error correspondences (also called unreliable
points) in the disparity map before the calculation of
matching cost aggregation. Since the error correspon-
dences usually appear near the image edges due to the
depth discontinuity (Zhang et al., 2017), Canny edge
detection is first carried out on the image, followed by
morphological dilation to find the unreliable points.
The matching confidence also considers the pixel lo-
cation difference between the smallest cost and the
second small cost. In our stereo with zooming ap-
proach, Equation (2) is also used to identify the unre-
liable points.
It should be noted that, Equation (2) is given in
the same world coordinate system for i and j, instead
of the image coordinates. Thus, the zoom correspon-
dence matching should be performed to align the im-
age coordinate frames. The disparity maps derived
from different zooms are then subtracted to obtain
the unreliable point map. Finally, we combine the
matching confidence, edge discontinuity, and zoom-
ing to derive the error correspondences, as given by
the equations
R
con
[x,y] =
(
1, 1 −
C
1st
x,y
C
2nd
x,y
< τ
0, otherwise
(3)
and
R[x,y] = R
con
[x,y]∪ R
edge
[x,y]∪ R
zoom
[x,y] (4)
where τ is a user parameter and set as 0.2 in the ex-
periments. Figure 3 shows an example of the image
‘Adirondack’ in the Middlebury dataset processed by
the proposed disparity reliability check method. We
use the percentage of error correspondences marked
as unreliable points to evaluate the results, and the
values of R
con
[x,y], R
con
[x,y] ∪ R
edge
[x,y] and R[x, y]
are 46.87%, 59.47% and 71.88%, respectively.
Cooperative Stereo-Zoom Matching for Disparity Computation
159
(a) Original left image (b) Error point (c) R
con
(x,y) ∪ R
edge
(x,y) (d) Result with zoom
Figure 3: The disparity reliability check on the image ‘Adirondack’ (in Middlebury 2014 dataset).
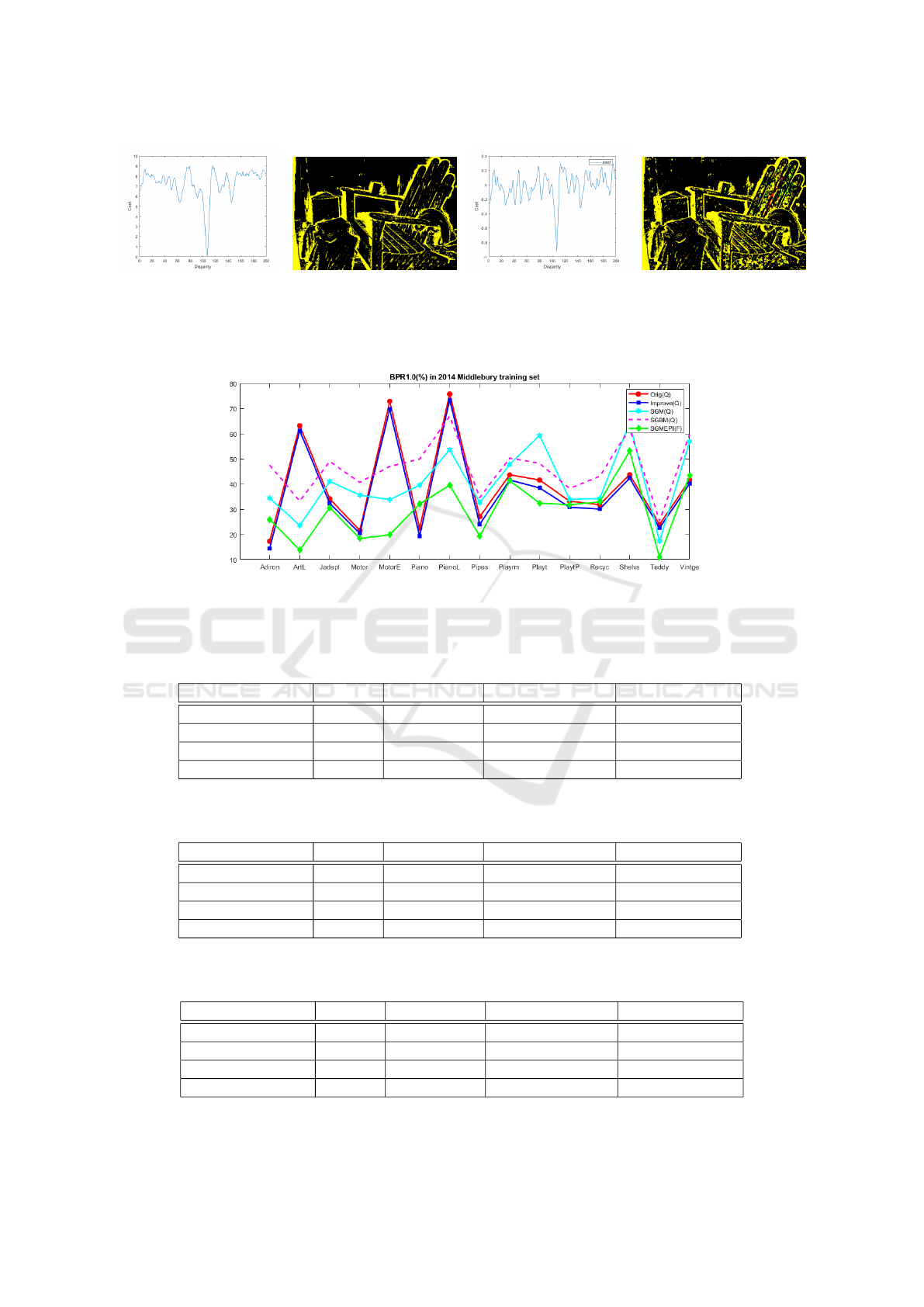
(a) BM (b) SGBM
Figure 4: The disparity cost curves for block matching (BM) and semi-global matching (SGBM).
2.3 Disparity Candidates
When calculating the disparity map, we usually pro-
vide a maximum disparity (D). The parameter D is
determined by the stereo vision system setup since
it has to be smaller than the disparity correspond-
ing to the closest scene distance perceivable by both
cameras. If all possibilities are considered for stereo
matching with different zoom images, the time com-
plexity will become O(D
2
). Thus, it is necessary to
choose only some specific disparities as candidates to
reduce the computation time. In general, the candi-
dates can be selected by the matching cost. However,
it might not work well for some algorithms such as
SGBM and the local minimum is used for the candi-
dates instead. Figure 4 shows the disparity cost curves
for block matching (BM) and semi-global matching
(SGBM). BM provides the more stable result com-
pared to SGBM.
2.4 Zoom Correspondence
After the main geometric construction and the match-
ing between the stereo image pair, the next problem
is to find the correspondences among different zoom
images. For the digital zoom, the correspondence can
be obtained directly by the image scale change. How-
ever, it is not a trivial task for the optical zoom. As
(a) Zoom1 images before rectification.
(b) Zoom2 images before rectification.
Figure 5: Although two image are captured in the same
place, little changes of the lens will make the image rec-
tification results different.
illustrated in Figure 5, two stereo image pairs are cap-
tured with different zoom positions. Due to the lens
movement for the zoom change, the image rectifica-
tion results are not identical even a suitable scale fac-
tor is applied.
The images captured by a camera with different
zooms can thought as acquired by different cameras.
It can then be considered as multiple view geometry,
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
160
and the most important relationship between the im-
ages is the epipolar constraint. Except for some spe-
cial cases, the stereo matching search range can be
reduced from the 2D plane to a 1D line.
We use homography to find the correspondences
directly for planar objects since the camera translation
is zero. It is a special case of the epipolar constraints,
and can be formulated by
sq
0
= K
0
(R +
t
d
n
T
)Kq → sq
0
= Hq (5)
where q and q
0
are in homogeneous coordinates, R
and t is are the rotation and translation between the
cameras, n and d are the normal vector and distance of
the object with respect to the first camera respectively,
and s is a scale factor.
To deal with the problem of the zooming prop-
erty changed by image rectification, we use camera
calibration to establish the relationship between dif-
ferent zoom images. Since this image rectification
only involves a rotation transformation, it can be com-
puted easily by homography. It should be noted that
the zoom property only holds under certain circum-
stances as described in Figure 2. Thus, we need to
add some constraints such as the position of the prin-
cipal point and the fixed aspect ratio.
When the calibration is carried out with addi-
tional constraints, the calibration error indicated by
the re-projection error is magnified as illustrated
in Table 1. The idea zoom model assumes that
two zoom images have the same principal points,
i.e. the field-of-view changes along the optical axis.
Our calibration result is with a little difference in
rotation: (−0.05
◦
,−1.18
◦
,−0.08
◦
) and translation:
(−0.7,2.7,−1.88). This should be neglected in most
common situations (Joshi et al., 2004). For more pre-
cise results, we adopt the SIFT features (Lowe et al.,
1999) and RANSAC (Fischler and Bolles, 1981) for
the correspondence matching to calculate a new zoom
center.
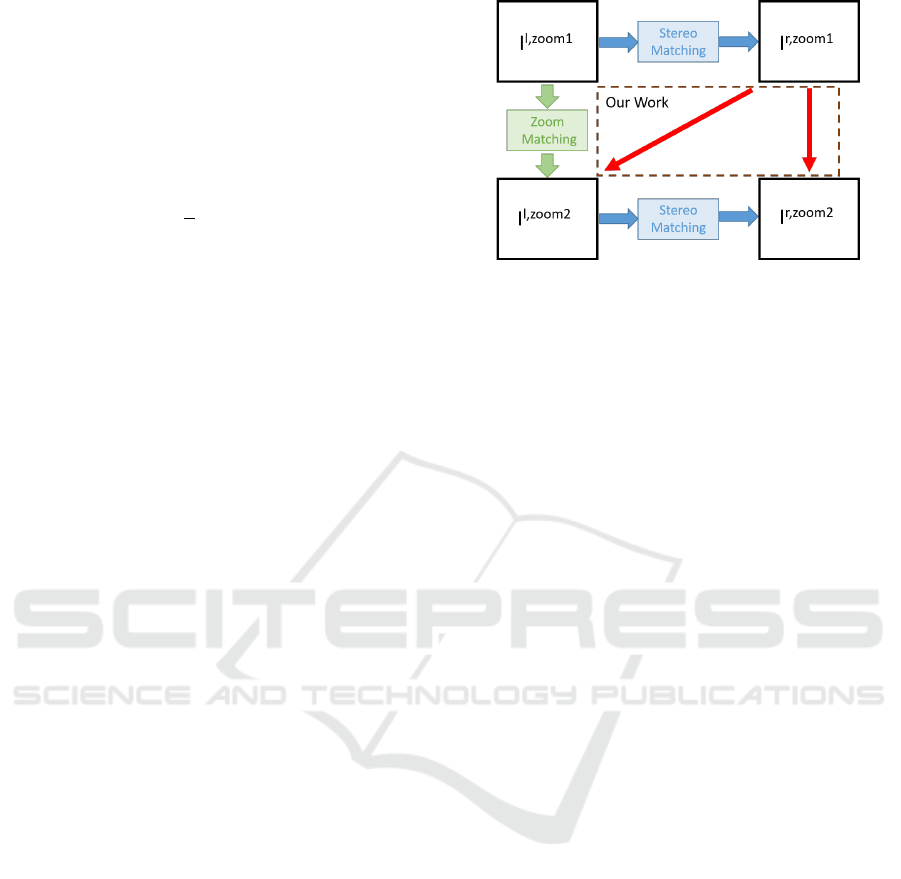
2.5 Cost Aggregation
To combine the information of two zoom image pairs,
it is necessary to study how their relationship can be
used. Figure 6 shows the concept and schematic dia-
gram of the proposed approach. The major concerns
are indicated by the red arrows since there is no guar-
antee of correspondence matching in this part. Here
we define a new cost function
Disparity =arg min
n
α(C
zoom1
n
+C
zoom2
m
) + β(C
mn
)
1 ≤ n ≤ 3,1 ≤ m ≤ 3
(6)
Figure 6: The relationship between two zoom image pairs.
The blue arrows represent the stereo matching, and the
green arrow represents the zoom correspondence.
where
C
n
= Cost(i, j,d
n
(i, j)),1 ≤ n ≤ 3 (7)
and
C
mn
= Cost(Z
1R
(i − d
n
(i, j), j), Z
2R
(i
0
− d
m
(i
0
, j
0
), j
0
))
+Cost(Z
1R
(i − d
n
(i, j), j), Z
2L
(i
0
, j
0
))
1 ≤ n ≤ 3,1 ≤ m ≤ 3
(8)
We only consider the pairs which are produced by the
disparity candidates, and Cost is a similarity metric
such as SSD, CT, or NCC. C
zoom1
n
and C
zoom2
m
can be
replaced by the cost given in the stereo matching al-
gorithms.
Equation (6) is based on the texture information.
In the reliability check, we use the disparity as a con-
straint. The correspondence pair produced by zoom
images are in the same place, so their distances to the
camera are the same. Thus, the cost function can in-
corporate the disparity constraint and is written as
FinalDisparity = argmin
n
α(C
zoom1
n
+C
zoom2
m
)
+β(Disparity
zoom1
n
− Disparity
zoom2
m
)
1 ≤ n ≤ 3,1 ≤ m ≤ 3 (9)
where α and β are user defined parameters as the pre-
vious equations.
3 EXPERIMENTS
The proposed technique is tested on the Middlebury
stereo datasets and our own dataset. Since Middle-
bury datasets do not contain zoom images, we manu-
ally synthesize the zoom images by resizing. They are
used to verify our method in the cost function eval-
uation. The stereo matching algorithms adopted in
Cooperative Stereo-Zoom Matching for Disparity Computation
161
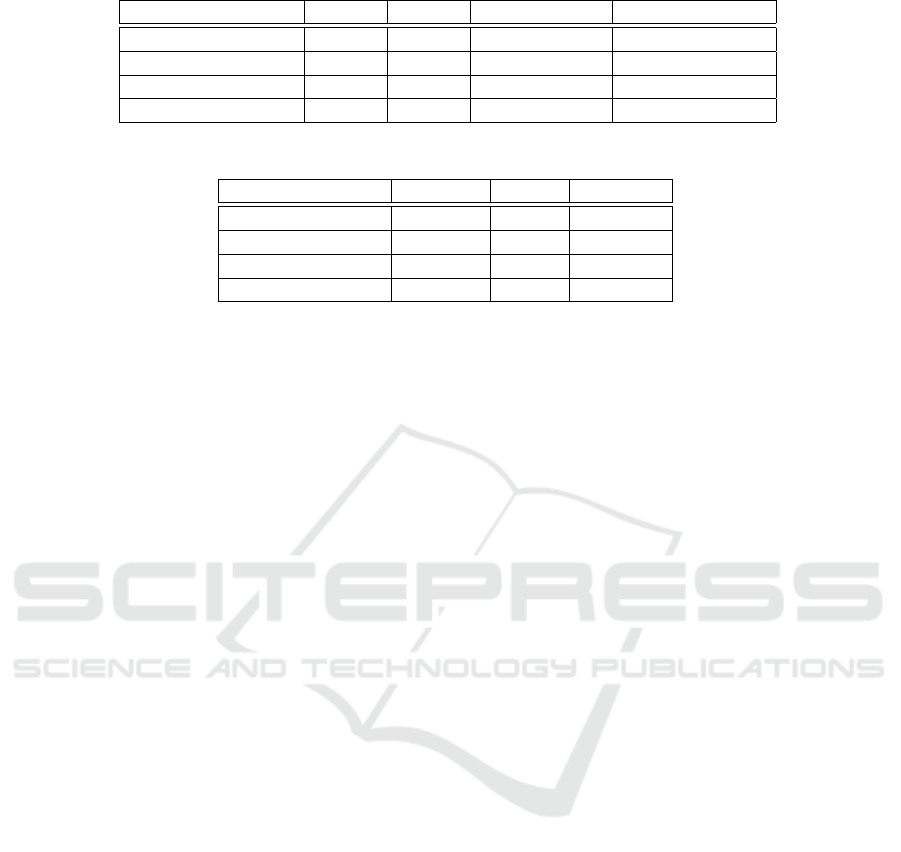
Table 1: The calibration performed under different constraints.
Condition focal X focal Y principal point reprojection error
Common 2209 2190 (988,887) (0.19,0.25)
no distortion 2962 2884 (1307,414) (0.33,0.32)
aspect=1 2166 2166 (1003,928) (0.19,0.25)
principal point fixed 2243 2243 (1023.5,767.5) (0.2,0.25)
Table 2: The average minimum costs of different methods (SGBM, BM, MC-CNN).
SGBM BM MC-CNN
doll 120.236 20.92 1.1056
toy brick 120.6858 21.78 1.0581
toy brick and cup 126.8454 19.55 0.9194
toy brick and lamp 113.8195 16.643 1.3634
our framework for performance comparison are BM,
SGBM and MC-CNN. BM and SGBM run with the
window size of 13 × 13, and P
1
, and P
2
are 18 and 32,
respectively. MC-CNN uses the fast model trained by
KITTI datasets. The parameter α is fixed as 1, and β is
20, 10 and 0.5 for SGBM, BM and MC-CNN, respec-
tively. The cost aggregation are tabulated in Table 2,
and the results from different methods are shown in
Tables 3–5. We choose the ‘Q’ Middlebury dataset as
the input and the evaluation method are BPR1.0.
In the cost function Equation (6), we only test CT
and NCC because the image intensity will be shifted
by the camera lens change and auto-exposure. The
results from our framework are not very significant
when adopted to MC-CNN. This might be due to the
design of the cost function for MC-CNN training. If
only the best solution is considered during training,
it will not provide the best correspondence candidates
for the algorithm, and the normal MC-CNN has a sim-
ilar process like SGBM. Figure 7 shows the results
with or without the SGBM process. There are clear
differences mainly because the basic algorithm can-
not provide the suitable candidates.
Figure 8 shows the result comparison of several
algorithms evaluated in this paper. For a fair com-
parison, we choose the same input size and remove
some machine learning based methods. We choose
SGBM+Dis as the result for comparison. The overall
performance of the framework is robust in the whole
dataset although some of them are not very significant
mainly due to the different illumination conditions of
the left and right images.
3.1 Optical Zoom Image Dataset
We use zoom lens cameras to construct a new dataset
with ground truth. The evaluation method using our
dataset is changed to BPR2.0 because the ground truth
labeled manually is not very precise. We test the
zoom correspondence methods mentioned previously,
and test the effect of the candidate quantity. The toy
brick+BM result appears very strange. When we cal-
culate the BPR with zoom2 disparity map in BM, its
value is near to 80%. Thus, we believe that the two
initial disparity maps must have a certain level of cor-
rectness.
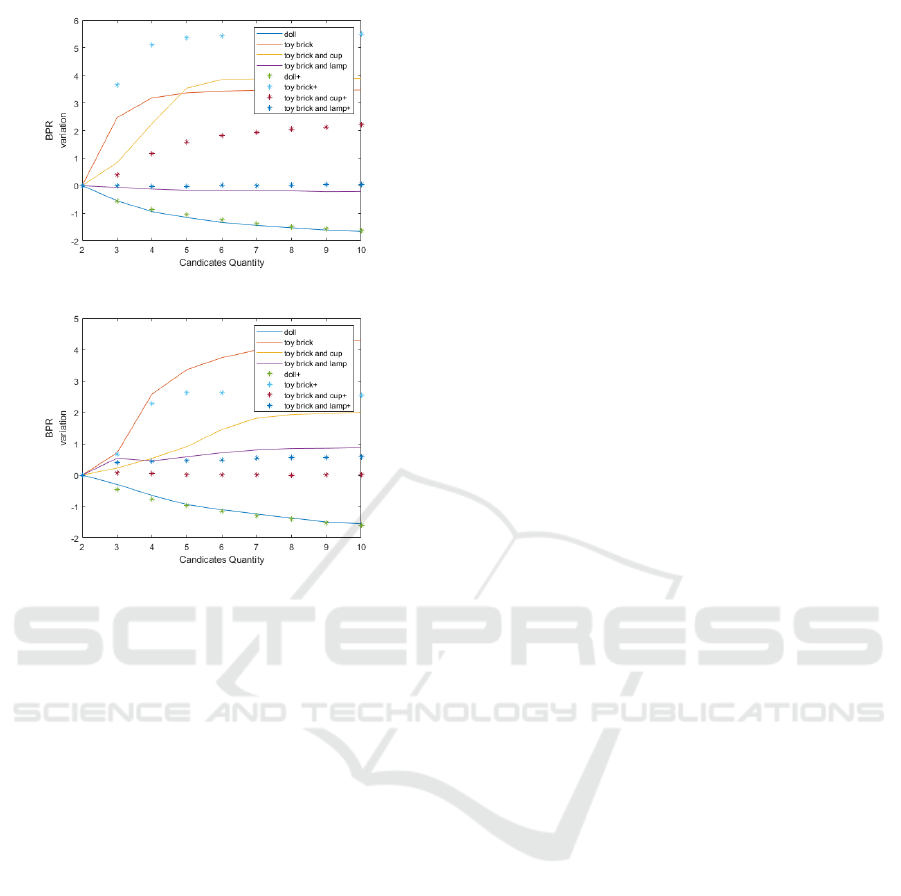
We then increase the number of disparity candi-
dates to test the relationship between the result and the
candidate quantity. In the disparity candidates, some
algorithms such as SGBM cannot just sort the cost
to choose candidates, so only MC-CNN and BM are
tested. Figure 9 shows that if we increase the number
of disparity candidates with no constraints, the results
will be unpredictable. Thus, we add a new constraint
that the correspondence pair only takes the candidates
in the top three, and the results are better improved.
MC-CNN encounters a problem that we cannot make
sure if the top three in the cost are the same as the
required candidates. The cost curve shown in Figure
7 only indicates the best disparity point. If the point
is removed the whole line will look like a horizontal
line with noise. With this test, it can be sure that the
overall framework is stable if the number of candidate
is sufficient.
4 CONCLUSION
In this work, a stereo matching framework using
zoom images is proposed. With zoom image pairs, we
are able to reduce the error and the uncertain region
in the disparity map. Compared to the existing stereo
matching algorithms, our approach can improve the
disparity results with less computation. The proposed
framework can adapt to the existing local and global
methods for stereo matching, even the machine learn-
ing based matching algorithms. In the future work,
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
162
(a) MC-CNN+SGBM (b) Result (c) MC-CNN (d) Result
Figure 7: MC-CNN with different processes. The improvement is shown in red, and the green part indicates the incorrect
change region.
Figure 8: The result comparison of different approaches. Here we use SGBM+Dis as our result and ‘Q’ means that we use the
quarter size image as input. SGM and SGBM are different with their basic cost functions, SGM is CT and the other is SAD.
The input of SGMEPI is in full size.
Table 3: SGBM + Equation (9).
Original Homography Epipole Geometry Zoom calibration
doll 19.6503 15.2552 15.5919 15.801
toy brick 14.5528 13.3947 13.6271 13.3372
toy brick and cup 9.8251 9.2016 9.5835 9.0291
toy brick and lamp 19.6457 17.6351 17.5975 17.804
Table 4: BM + Equation (9).
Original Homography Epipole Geometry Zoom calibration
doll 25.5569 22.3145 22.3699 23.0199
toy brick 15.1138 15.7089 15.7333 15.5487
toy brick and cup 12.797 12.1638 11.7294 12.1277
toy brick and lamp 26.4771 25.8682 25.2747 25.6811
Table 5: MC-CNN (No SGBM) + Equation (9).
Original Homography Epipole Geometry Zoom calibration
doll 22.3460 20.2321 21.0419 20.4651
toy brick 18.9041 25.8092 21.7056 24.3230
toy brick and cup 11.8306 12.9873 12.8016 12.9491
toy brick and lamp 23.2376 22.8388 22.4940 22.9996
Cooperative Stereo-Zoom Matching for Disparity Computation
163
MC-CNN (No SGBM)
BM
Figure 9: The effect of the candidate quantity, ‘+’ means
adding the constraint about the candidate order.
more investigation will be carried out to aggregate
the information for machine learning methods and the
cost computation.
REFERENCES
Batsos, K., Cai, C., and Mordohai, P. (2018). Cbmv: A
coalesced bidirectional matching volume for disparity
estimation. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
2060–2069.
Chang, Q. and Maruyama, T. (2018). Real-time stereo vi-
sion system: a multi-block matching on gpu. IEEE
Access, 6:42030–42046.
Chen, Y., Zhuo, B., and Lin, H. (2018). Stereo with
zooming. In 2018 IEEE International Conference on
Systems, Man, and Cybernetics (SMC), pages 2224–
2229.
Cheng, K. and Lin, H. (2015). Stereo matching with bit-
plane slicing and disparity fusion. In 2015 IEEE In-
ternational Conference on Systems, Man, and Cyber-
netics, pages 341–346.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, second edition.
Hosni, A., Bleyer, M., Rhemann, C., Gelautz, M., and
Rother, C. (2011). Real-time local stereo matching
using guided image filtering. In 2011 IEEE Interna-
tional Conference on Multimedia and Expo, pages 1–
6. IEEE.
Jie, Z., Wang, P., Ling, Y., Zhao, B., Wei, Y., Feng, J.,
and Liu, W. (2018). Left-right comparative recur-
rent model for stereo matching. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 3838–3846.
Joshi, M. V., Chaudhuri, S., and Panuganti, R. (2004).
Super-resolution imaging: use of zoom as a cue. Im-
age and Vision Computing, 22(14):1185–1196.
Kim, K.-R. and Kim, C.-S. (2016). Adaptive smoothness
constraints for efficient stereo matching using texture
and edge information. In Image Processing (ICIP),
2016 IEEE International Conference on, pages 3429–
3433. IEEE.
Lowe, D. G. et al. (1999). Object recognition from local
scale-invariant features. In iccv, volume 99, pages
1150–1157.
Park, M.-G. and Yoon, K.-J. (2019). As-planar-as-possible
depth map estimation. Computer Vision and Image
Understanding.
Scharstein, D. and Szeliski, R. (2002). Middlebury stereo
vision page. http://vision.middlebury.edu/stereo.
Seki, A. and Pollefeys, M. (2017). Sgm-nets: Semi-global
matching with neural networks. In 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 6640–6649.
ˇ
Zbontar, J. and LeCun, Y. (2016). Stereo matching by train-
ing a convolutional neural network to compare image
patches. J. Mach. Learn. Res., 17(1):2287–2318.
Zhang, S., Xie, W., Zhang, G., Bao, H., and Kaess, M.
(2017). Robust stereo matching with surface normal
prediction. In Robotics and Automation (ICRA), 2017
IEEE International Conference on, pages 2540–2547.
IEEE.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
164
