
Semantic Scene Completion from a
Single 360-Degree Image and Depth Map
Aloisio Dourado
1 a
, Hansung Kim
2 b
, Teofilo E. de Campos
1 c
and Adrian Hilton
2 d
1
University of Brasilia, Brasilia, Brazil
2
CVSSP, University of Surrey, Surrey, U.K.
Keywords:
Semantic Scene Completion, 360-Degree Scene Reconstruction, Scene Understanding, 360-Degree Stereo
Images.
Abstract:
We present a method for Semantic Scene Completion (SSC) of complete indoor scenes from a single 360
◦
RGB image and corresponding depth map using a Deep Convolution Neural Network that takes advantage
of existing datasets of synthetic and real RGB-D images for training. Recent works on SSC only perform
occupancy prediction of small regions of the room covered by the field-of-view of the sensor in use, which
implies the need of multiple images to cover the whole scene, being an inappropriate method for dynamic
scenes. Our approach uses only a single 360
◦
image with its corresponding depth map to infer the occupancy
and semantic labels of the whole room. Using one single image is important to allow predictions with no
previous knowledge of the scene and enable extension to dynamic scene applications. We evaluated our
method on two 360
◦
image datasets: a high-quality 360
◦
RGB-D dataset gathered with a Matterport sensor
and low-quality 360
◦
RGB-D images generated with a pair of commercial 360
◦
cameras and stereo matching.
The experiments showed that the proposed pipeline performs SSC not only with Matterport cameras but also
with more affordable 360
◦
cameras, which adds a great number of potential applications, including immersive
spatial audio reproduction, augmented reality, assistive computing and robotics.
1 INTRODUCTION
Automatic understanding of the complete 3D geome-
try of a indoor scene and the semantics of each occu-
pied 3D voxel is one of essential problems for many
applications, such as robotics, surveillance, assistive
computing, augmented reality, immersive spatial au-
dio reproduction and others. After years as an active
research field, this still remains a formidable chal-
lenge in computer vision. Great advances in scene un-
derstanding have been observed in the past few years
due to the large scale production of inexpensive depth
sensors, such as Microsoft Kinect. Public RGB-D
datasets have been created and widely used for many
3D tasks, including prediction of unobserved voxels
(Firman et al., 2016), segmentation of visible sur-
face (Silberman and Fergus, 2011; Ren et al., 2012;
Qi et al., 2017b; Gupta et al., 2013), object detec-
tion (Shrivastava and Mulam, 2013) and single object
a
https://orcid.org/0000-0002-5037-7178
b
https://orcid.org/0000-0003-4907-0491
c
https://orcid.org/0000-0001-6172-0229
d
https://orcid.org/0000-0003-4223-238X
completion (Nguyen et al., 2016).
In 2017, a new line of work was introduced, focus-
ing on the complete understanding of the scene: Se-
mantic Scene Completion (SSC) (Song et al., 2017).
SSC is the joint prediction of occupation and seman-
tic labels of visible and occluded regions of the scene.
The works in this area are mostly based on the use
of Convolution Neural Networks (CNNs) trained on
both synthetic and real RGB-D data (Garbade et al.,
2018; Guedes et al., 2017; Zhang et al., 2018a; Zhang
et al., 2018b; Liu et al., 2018). However, due to the
limited field-of-view (FOV) of RGB-D sensors, those
methods only predict semantic labels for a small part
of the room and at least four images are required to
understand the whole scene.
This scenario recently started to change with the
use of more advanced technology for large-scale 3D
scanning, such as Light Detection and Ranging (LI-
DAR) sensor and Matterport cameras. LIDAR is one
of the most accurate depth ranging devices using a
light pulse signal but it acquires only a point cloud
set without colour or connectivity. Some recent LI-
DAR devices provide coloured 3D structure by map-
36
Dourado, A., Kim, H., E. de Campos, T. and Hilton, A.
Semantic Scene Completion from a Single 360-Degree Image and Depth Map.
DOI: 10.5220/0008877700360046
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
36-46
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

3DCNN
3DCNN
3DCNN
3DCNN
3DCNN
3DCNN
3DCNN
3DCNN
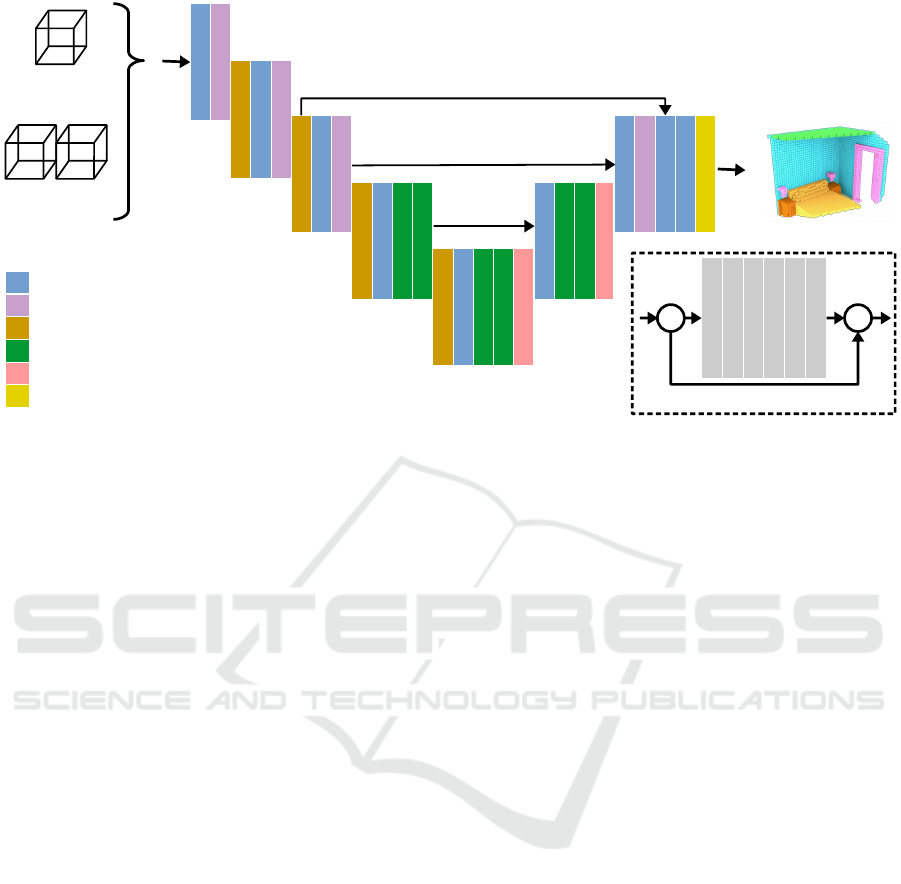
Figure 1: Overview of our proposed approach. The incomplete voxel grid generated from input panoramic depth map is
automatically partitioned in 8 overlapping views that are individually submitted to our 3D CNN. The resulting prediction
is generated from an automatic ensemble of the 8 individual predictions. The result is a complete 3D voxel volume with
corresponding semantic labels for occluded surfaces and objects interior.
ping photos taken during the scan
1
, but it does not
provide full texture maps. The Matterport camera
2
using structured light sensors allows 3D datasets that
comprise high-quality panoramic RGB images and its
corresponding depth maps of indoor scenes (Armeni
et al., 2017; Chang et al., 2017) for a whole room.
Figure 2 depicts the difference on SSC results from
normal RGB-D and 360
◦
RGB-D image.
Alongside the advanced sensors like Matterport,
there are currently many low cost consumer-level
spherical cameras available with stereoscopic sup-
port, allowing high-resolution 360
◦
RGB image cap-
ture, that made widely possible the generation of 360
◦
images and corresponding depth maps through stereo
matching. A system created to perform SSC for high-
quality 360
◦
images should be also able to work on
images generated from low cost cameras, widening
the possibilities of applications.
Despite the interesting features of the new large
scale 3D datasets, the lack of variety in the type of the
scenes is an important drawback. For instance, while
NYU v2 regular RGB-D dataset (Silberman et al.,
2012) comprises a wide range of commercial and res-
idential buildings in three different cities across 26
scene classes, Stanford 2D-3D-Semantics large-scale
dataset (Armeni et al., 2016) only comprises 6 aca-
demic buildings and Matterport 3D (Chang et al.,
2017) dataset covers only 90 private homes. As most
of the SSC solutions are data-driven and CNN-based,
a dataset containing a large variety of scene types and
object compositions is important to train generalized
models. Another limitation of recent scene comple-
tion or segmentation methods that use large scans is
1
FARO LiDAR, https://www.faro.com/products/
construction-bim-cim/faro-focus/
2
Matterport, https://matterport.com/pro2-3d-camera/
(a) Standard RGB-D (b) 360
◦
image
walloor furn. objectswindow chair table sofa
Figure 2: SSC prediction from a regular RGB-D image in
(a) covers only a small part of the Scene, while the result
from panoramic RGB-D images in (b) covers the whole
scene.
that they usually take, as input, a point cloud gen-
erated from multiple points of view, implying pre-
processing and some level of prior knowledge of the
scene.
To overcome these limitations of both previous ap-
proaches, we propose a SSC method for a single 360
◦
RGB image and its corresponding depth map image
that uses 3D CNN trained on standard synthetic RGB-
D data and fine tuned on real RGB-D scenes. The
overview of our proposed approach is presented in
Figure 1. The proposed method decomposes a single
360
◦
scene into several overlapping partitions so that
each one simulates a single view of a regular RGB-D
sensor, and submits to our pre-trained network. The
final result is obtained aligning and ensembling the
partial inferences.
We evaluated our method on the Stanford 2D-3D-
Semantics Dataset (2D-3D-S) (Armeni et al., 2017)
gathered with the Matterport sensor and stereo 360
◦
Semantic Scene Completion from a Single 360-Degree Image and Depth Map
37

images captured by a pair of low cost 360
◦
cameras.
For the experiments with low-cost cameras, we pro-
pose a pre-processing method to enhance noisy 360
◦
depth maps before submitting the images to the net-
work for prediction. Our qualitative analysis show
that the proposed method achieves reliable results
with the low-cost 360
◦
cameras.
Here are our main contributions:
• We are the first to extend the SSC task to complete
scene understanding using 360
◦
imaging sensors
or stereoscopic spherical cameras;
• We propose a novel approach to perform SSC for
360
◦
images taking advantage of existing standard
RGB-D datasets for network training;
• We propose a pre-processing method to enhance
depth maps estimated from a stereo pair of low-
cost 360
◦
cameras.
2 RELATED WORK
This paper relates to three fields of computer vision,
discussed below.
2.1 RGB-D Semantic Scene Completion
3D SSC from standard RGB-D images is a problem
that was established quite recently (Song et al., 2017),
and consist of, given a single RGB-D image, clas-
sifying the semantic labels of all the voxels within
the voxel space of the field-of-view, including oc-
cluded and non surface regions. The authors used a
large synthetic dataset (SUNCG) to generate approx-
imately 140 thousand depth maps that were used to
train a typical contracting fully convolutional neural
network with 3D dilated convolutions. They showed
that jointly training for segmentation and completion
leads to better results, as both tasks are inherently in-
terlinked. To deal with data sparsity after projecting
depth maps from 2D to 3D, the authors used a vari-
ation of Truncated Signed Distance Function (TSDF)
that they called Flipped TSDF (F-TSDF). After train-
ing on SUNCG, the network was fine-tuned on the
NYU depth v2 dataset (Silberman et al., 2012), which
was acquired using the first version of MS Kinect.
After this initial work, some authors explored dif-
ferent approaches and architectures achieving good
improvements on SSC results, still using the F-TSDF
encoded depth map projected to 3D (Guo and Tong,
2018; Zhang et al., 2018a). Another line of work tried
to aggregate information from the RGB channels to
the SSC network (Guedes et al., 2017), however, bet-
ter results were observed using a two step training
protocol, where a 2D semantic segmentation CNN is
first trained and then it is used to generate input to a
3D semantic scene completion CNN (Garbade et al.,
2018; Liu et al., 2018).
In order to avoid the need for a two-step training
process, we follow a line of work to combine grey-
level information with depth maps(Dourado et al.,
2019). This is done by using edges detected on the
RGB images to highlight flat objects on flat surfaces.
Such regions have no depth discontinuity and there-
fore cannot be captured as boundaries between ob-
jects on depth maps. In this approach, the detected
edges are projected to 3D and then F-TSDF is applied.
The authors observed better results without the need
of two training processes.
The main advantage of the regular RGB-D ap-
proaches is the abundance and variety of available
datasets with densely annotated ground truth which
favours the training of deep CNNs. On the other hand,
their main drawback is the limited FOV of the sensor,
as depicted in Figure 2. Our proposed approach ben-
efits from existing RGB-D datasets for training and
presents a way to overcome the limited FOV draw-
back using 360
◦
images to achieve complete scene
coverage.
2.2 Scene Understanding from Large
Scale Scans
The Scene Understanding research field observed a
boost after the public availability of high quality
datasets like Stanford 2D-3D-Semantics Dataset (Ar-
meni et al., 2017) and Matterport3D (Chang et al.,
2017), acquired with the Matterport camera, which
comprises point cloud ground truth of the whole
buildings, 360
◦
RGB panoramas and corresponding
depth maps and other features. The scanning process
uses a tripod-mounted sensor that comprises three
color and three depth cameras pointing slightly up,
horizontal, and slightly down. It rotates and acquires
RGB photos and depth data. Resulting 360
◦
RGB-
D panoramas are software-generated from this data
(Chang et al., 2017). These datasets allowed the
development of several scene understanding works
(Charles et al., 2017; Liu et al., 2017; Qi et al.,
2017a). Most of these works focus only on the vis-
ible surfaces, rather than on the full understanding of
the scene including occluded regions and inner parts
of the objects.
In a different line of work, Im2Pano3D (Song
et al., 2018) uses data from large scale scans to train a
CNN that generates a dense prediction of a full 360
◦
view of an indoor scene from a given partial view of
the scene corresponding to a regular RGB-D image.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
38

The work that is most related to our proposal is
ScanComplete (Dai et al., 2018). Using data from
synthetic or real large scale datasets and a generative
3D CNN, it tries to complete the scene and classify all
surface points. However, unlike our proposal, it takes
inputs from multiple viewpoints.
Although large-scale scans provide a workaround
to surpass the FOV limitations of popular RGB-D
sensors, they have the significant drawback that multi-
ple captures of the scene are required to cover a com-
plete scene layout. In addition, each acquisition is a
slow scanning process that can only work if the scene
remains static for the duration of all captures. There-
fore it may be unfeasible to apply them for dynamic
scene understanding.
2.3 Scene Understanding using 360
◦
Stereo Images
Spherical imaging provides a solution to overcome
the drawbacks inherent to large scale scans. Schoen-
bein et al. proposed a high-quality omnidirectional
3D reconstruction from catadioptric stereo video
cameras (Schoenbein and Geiger, 2014). However,
these catadioptric omnidirectional cameras have a
large number of systematic parameters including the
camera and mirror calibration. In order to get high
resolution spherical images with accurate calibration
and matching, Spheron developed a line-scan cam-
era, Spheron VR
3
, with a fish-eye lens to capture the
full environment as an accurate high resolution / high
dynamic range image. Li (Li, 2006) has proposed a
spherical image acquisition method using two video
cameras with fish-eye lenses pointing in opposite di-
rections. Various inexpensive off-the-shelf 360
◦
cam-
eras with two fish-eye lenses have recently become
popular
4,5,6
. However, 360
◦
RGB-D cameras which
automatically generate depth maps are not yet avail-
able. Kim and Hilton proposed depth estimation and
scene reconstruction methods using a pair of 360
◦
im-
ages from various types of 360
◦
cameras (Kim and
Hilton, 2013; Kim et al., 2019). We applied this stereo
based method to acquire depth maps for image cap-
tured with 360
◦
cameras in the experiments.
3
Spheron, https://www.spheron.com/products.html
4
Insta360, https://www.insta360.com
5
GoPro Fusion, https://shop.gopro.com/EMEA/
cameras/fusion/CHDHZ-103-master.html
6
Ricoh Theta, https://theta360.com/en/
3 DATASETS
We take advantage of existing diverse RGB-D train-
ing datasets to train our networks for general semantic
scene completion. After training, we evaluate the per-
formance of our model on datasets never seen before
by the networks. This section describes the datasets
used for training and evaluation.
3.1 Training Datasets
We train our 3D CNN on RGB-D depth maps from
the training set of SUNCG (Song et al., 2017)
and fine-tuned the networks on train set of NYUv2
dataset(Silberman et al., 2012). SUNCG dataset con-
sists of about 45K synthetic scenes from which were
extracted more than 130K 3D snapshots with corre-
sponding depth maps and ground truth divided in train
and test datasets. As the provided training data did not
include RGB images, we generated images as speci-
fied in (Dourado et al., 2019).
NYU v2 dataset includes depth and RGB images
captured by the Kinect depth sensor gathered from
commercial and residential buildings, comprising 464
different indoor scenes. We generated ground truth by
voxelizing the 3D mesh annotations from (Guo et al.,
2015) and mapped object categories based on (Handa
et al., 2015) to label occupied voxels with semantic
classes.
3.2 Evaluation Datasets
Two distinct datasets are used for evaluation: Stanford
2D-3D-Semantics (Armeni et al., 2017) and a dataset
created by off-the-shelf 360
◦
cameras.
Stanford 2D-3D-Semantics is large-scale scan
dataset gathered with a Materpport camera in aca-
demic indoor spaces. The dataset covers over 6,000
m
2
from 7 distinct buildings areas. For each room
of the building areas, two or more 360
◦
scans con-
taining several RGB-D images are taken. The im-
ages from the scans are aligned, combined, and post-
processed to generate one large scale point cloud file
for each building area. The point cloud is then an-
notated with 13 class labels, to be used as ground
truth. Each point of the point cloud is also annotated
with the room which it belongs to. The dataset also
provides a complete RGB 360
◦
panorama, with cor-
responding depths for each room scan, camera rota-
tion/translation information, and other features useful
for 3D understanding tasks. Depth maps are provided
as 16 bits png images, with a sensibility of 1/512 m.
The value 2
16
− 1 is used for pixels without a valid
depth measurement.
Semantic Scene Completion from a Single 360-Degree Image and Depth Map
39

In order to show general applications of the pro-
posed pipeline, we also used three general 360
◦
im-
age sets captured by various 360
◦
cameras: Meet-
ing Room, Usability Lab and Kitchen. The Meet-
ing Room is similar to a normal living room envi-
ronment in our daily lives including various objects
such as sofas, tables, bookcases, etc. The Usability
Lab is similar to the Meeting Room in its size but
includes more challenging objects for scene under-
standing such as large windows and a big mirror on
the walls. The Kitchen is a small and narrow room
with various kitchen utensils. The scenes are captured
as a vertical stereo image pair and dense stereo match-
ing with spherical stereo geometry (Kim and Hilton,
2015) is used to recover depth information.
4 PROPOSED APPROACH
Our proposed approach, illustrated in Figure 1, is de-
scribed in details in the next subsections. All source
code and pretrained models required to reproduce
our experiments is publicly available in https://gitlab.
com/UnBVision/edgenet360.
4.1 Input Partitioning
From the 360
◦
panoramic depth map, we generate a
voxel grid of all the visible surfaces from the cam-
era position, resulting in an incomplete and sparse 3D
volume (480×144×480 voxels). The preferred voxel
size throughout this work is 0.02m which gives an
coverage of 9.6 × 2.8 × 9.6 m, but this value can be
set to a higher value to reach larger areas, with little
impact in prediction accuracy. The resulting volume
is then automatically partitioned into 8 views using a
45
◦
step, each of them emulating the field of view of
one standard RGB-D sensor. The emulated sensor is
positioned 1.7m back from the original position of the
360
◦
sensor, in order to get a better overlapped cover-
age, especially when the camera is placed near a wall,
as is the case of scene from Figure 1 (in that scene,
the camera is placed in the bottom left corner of the
room). The reason for taking overlapping partitions
is to improve the final prediction in the borders of the
emulated sensors FOV, by ensembling multiple SSC
estimates. Voxels behind the original sensor position
are not included in the partition. Each partition size is
240 × 144 × 240 voxels.
4.2 Semantic Scene Completion
Network
The resulting partitions are individually submitted to
the SSC network for prediction. In our experiments,
we used EdgeNet (Dourado et al., 2019), which is a
3D CNN inspired by the U-Net design (Ronneberger
et al., 2015) that, uses a surface volume together with
a volume generated from the edges present in the
RGB image in order to enhance the predictions of ob-
jects that are hard to see in depth maps. Its archi-
tecture is presented in Figure 3. Both input volumes
are encoded using F-TSDF (Song et al., 2018) and
the network can be optionally trained to work with-
out the edges volume, as depicted in Figure 1. In our
case, the edge volume was generated from the edges
present in the RGB panorama projected to 3D using
the depth information of corresponding pixels. The
partition scheme for the edge volume is the same as
that used for the surface volume. For edge detection
we used the standard Canny edge detector (Canny,
1986). The final activation function of EdgeNet is a
Softmax, each voxel of the output volume contains
the predicted probabilities of the 12 classes used for
training. The output resolution for each partition is
60 × 36 × 60 voxels.
We trained EdgeNet on standard RGB-D images
extracted from the SUNCG training set and fine-tuned
on NYU v2 (these datasets are described in Sec-
tion 3). For the training phase, we used the One Cycle
Learning policy (Smith, 2018), which is a combina-
tion of Curriculum Learning (Bengio et al., 2009) and
Simulated Annealing (Aarts and Korst, 1989), using
the same hyperparameters as (Dourado et al., 2019).
For fine tuning, we initialized the network with pa-
rameters trained on SUNCG and used standard train-
ing with SGD with a fixed learning rate of 0.01 and
0.0005 of weight decay. Using the training pipeline
described in (Dourado et al., 2019), with offline F-
TSDF pre-processing, our training time was 4 days
on SUNCG and 6 hours on NYU, using a Nvidia GTX
1080 Ti GPU.
4.3 Prediction Ensemble
Each partition of the input data is processed by our
CNN, generating 8 predicted 3D volumes. There are
significant overlaps between the FOV of each CNN
(some voxels are even captured from 3 different view-
points), and their predictions need to be combined.
We use a simple yet effective strategy of summing the
a posteriori probability for each class over all clas-
sifier outputs, i.e., we apply the “sum rule”, demon-
strated by Kittler et al. (Kittler et al., 1998). Firstly,
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
40
Conv3D(8,3,1)
Input
ResNet(8,3,1)
MaxPooling3D(2,2)
240x144x200
MaxPooling3D(2,2)
120x72x120
Conv3D(32,3,1)
MaxPooling3D(2,2)
60x36x60
ResNet(64,3,1)
ResNet(64,3,1)
MaxPooling3D(2,2)
30x18x30
Dilated3D(128,3,1)
Dilated3D(128,3,1)
UpConv3D(64,2,2)
15x9x15
30x18x30
Conv3D(64,3,1)
UpConv3D(32,2,2)
Concat.
60x36x60
Conv3D(32,3,1)
Concat.
Conv3D(16,1,1)
Conv3D(12,1,1)
60x36x60
Conv3D(16,1,1)
Concat.
Output
Depth
F-TSDFT
240x144x200
240x144x200
Depth
F-TSDFT
Edges
F-TSDFT
OR
BatchNormalization
ReLU
Conv3D(ch,sz,st,dil)
Conv3D(ch,sz,st,dil)
BatchNormalization
ReLU
+
input output
ResNet module with optional dilation
ResNet module (channels, size, strides, dilation=1)
Maxpooling3D(size, strides)
Dilated ResNet module (channels, size, strides,dilation=2)
Conv3DTranspose(channels, size, strides)
Conv3D(channels, size, strides) + Softmax + Categorical Cross Entropy Loss
Conv3D(channels, size, strides)
ResNet(16,3,1)
ResNet(32,3,1)
Conv3D(16,3,1)
Conv3D(64,3,1)
Conv3D(128,3,1)
ResNet(64,3,1)
ResNet(64,3,1)
ResNet(32,3,1)
Figure 3: The U-shaped architecture of EdgeNet, with two possible sets of input channels: depth only or depth plus edges
(best viewed in colour).
the prediction of each partition is aligned according
its position in the final voxel volume. If a given voxel
is not covered by a given partition, then the corre-
sponding classifier a posteriori probabilities for all
classes for that voxel and that partition will be 0, i.e.,
the softmax result is overruled in voxels outside the
field of view of a given partition. Otherwise, the sum
of the a posteriori probabilities for all classes for that
voxel and that classifier will be 1. Given that, for any
arbitrary voxel, being n the number of partitions and
P
i j
the a posteriori probability of the class i predicted
by the classifier j, then, the sum of the probabilities
for class i over all classifiers is given by
S
i
=
n
∑
j=1
P
i j
(1)
and the winning class C for that voxel is
C = argmax
i
(S
i
) . (2)
4.4 Depth Map Enhancement
Stereo capture using commercial 360
◦
cameras is one
of realistic approaches as a 360
◦
RGB-D system is not
available in the market. However, depth estimation
from stereoscopic images is subject to errors due to
occlusions between two camera views and correspon-
dence matching errors. These depth errors would lead
to noisy and incomplete predictions in SSC. We pro-
pose a pre-processing step to enhance this erroneous
depth map by taking into account two characteristics
of most of the indoor scenes: 1) the majority of indoor
scenes can be aligned to the Cartesian axis, following
the Manhattan principle (Gupta et al., 2010); 2) the
edges present in the RGB images are usually distin-
guishing features for stereo matching, providing good
depth estimates on their neighbourhood.
The Canny Edge detector (Canny, 1986), with low
and high thresholds of 30 and 70, is applied to the im-
age and the edges are dilated to 3 pixels width. We
observed that those parameters works well for a wide
range of RGB images. Using the dilated edges as a
mask, we extract the most reliable depth estimations
from the original depth map. Vertical edges are re-
moved from the mask as they do not contribute to the
stereo matching procedure in the given vertical stereo
camera set up. Using the thin edges as a border de-
limitation, coherent regions with similar colours are
searched by a flood fill approach in the RGB im-
age. With this procedure, we expect to get feature-
less planar surfaces like single colored walls and ta-
ble tops whose depth surfaces are hard to be estimated
by stereo matching. RANSAC (Fischler and Bolles,
1981) is used to fit a plane over those regions elimi-
nating outliers from false stereo matching. If the nor-
mal vector of the fitted plane is close to one of the
principal axes, we replace the original depth informa-
tion of the region with the back-projected depths es-
timated from the plane. Discarding non-orthogonal
planes is important to avoid planes estimated from
non-planar regions, like wall corners, where the con-
trast in not enough to produce an edge between two
walls. We keep the original depth estimations from
the regions where we were not able to fit good planes.
We also re-estimate the depths of the south and north
poles of the image, as they usually have bad depth es-
Semantic Scene Completion from a Single 360-Degree Image and Depth Map
41

timations as proved in (Kim and Hilton, 2013). Good
depth estimations from the outer neighborhood of the
poles are used as a source for the RANSAC plane fit-
ting.
5 EVALUATION
We quantitatively evaluated our approach on the Stan-
ford 2D-3D-Semantics dataset. We also provide
a qualitative evaluation on that dataset and on our
stereoscopic images. In this section we describe the
experiments and discuss the results.
5.1 Evaluation Metric
As previous works on SSC, we evaluate our proposed
approach using Intersection Over Union (IOU) for
each class, over visible occupied and occluded vox-
els inside the room. However, unlike RGB-D works
that only evaluate voxels inside the field of view of
the sensor, we evaluate over the whole scene. Un-
fortunately, Stanford 2D-3D does not provide ground
truth for the interior of the objects nor for areas that
are not visible from at least one of the scanning points,
so, we limit our quantitative evaluation to the areas to
which ground is provided. We kept the predictions not
covered by the ground truth for qualitative evaluation
purposes.
5.2 Experiments on Stanford
2D-3D-Semantics Dataset
In order to feed our SSC network with aligned vol-
umes, we rotated the provided 360
◦
RGB panora-
mas and depth maps using the camera rotation matrix
before generating a corresponding input point cloud.
Using the room dimensions provided by the dataset,
we discarded depth estimations outside room and gen-
erated the voxel volume placing camera in the center
of the X and Z axis and keeping the capture height so
that the floor level is at the voxel plane y=0.
For quantitative evaluation, we extracted only
the points belonging to the room from the provided
ground-truth (GT) point cloud and translated them to
the camera position. In order to align the GT to our
input volumes, we voxelized the point cloud using the
same voxel size as our input volumes.
Stanford 2D-3D-Semantics dataset classifies each
point in 13 classes, while the ground truth extracted
from the datasets used to train our network (SUNCG
and NYU) classifies the voxels in 12 classes. We
mapped the classes board and bookcase from Stan-
ford 2D-3D-Semantics dataset to classes ob jects
and f urniture; and both classes beam and door to
wall. Predictions of the classes bed and tv from
SUNCG that have no correspondence in Stanford 2D-
3D-Semantics dataset were remapped to table and
ob jects, respectively. We evaluated all the panora-
mas from all rooms of types office, conference room,
pantry, copy room, and storage. We discarded room
types open space, lounge, hallway and WC. We eval-
uated 669 pairs of 360
◦
RGB images and depth maps
from Stanford 2D-3D-Semantics dataset.
Quantitative results for the Stanford 2D-3D-
Semantics dataset are provided in table 1. As a base-
line, we compare our results to previous works on
SSC evaluated on the NYU v2 dataset. It is worth
mentioning that, as those results are from different
datasets and tasks(our work is the only one that cov-
ers the whole scene), they cannot be taken as a direct
comparison of models performance.
Our 360
◦
EdgeNet-based ensemble achieved very
good overall results and a high level of semantic seg-
mentation accuracy was observed on structural ele-
ments floor and wall. Good results were also observed
on common scene objects like chairs, sofas, tables and
furniture, as well. On the other hand, the same level
of performance was not observed on the ceiling, due
to domain shift (Csurka, 2017) between training and
evaluation datasets. Ceiling in the Stanford dataset is
in average higher than that in the NYU dataset where
the network was trained. Even so, given that our
model had no previous knowledge of the dataset be-
ing evaluated, results shows that the proposed model
generalizes the scenes well.
Qualitative results presented in Figure 4 depicts
the high level of completion achieved by our ap-
proach, as seen by comparing the input volume
(green) to the prediction. The level of completion is
even higher than the the ground truth models, which
was manually composed and labelled by the authors
using the surface gathered from multiple viewpoints.
Note that the missing and occluded regions in the
ground truth of scenes were completed in their cor-
respondent predicted volumes. For instance, observe
that the floor and wall surrounding the chair in the
second scene that are missing in GT was completed
by our solution. Semantic labelling results also show
high accuracy. In the first scene, the majority of the
objects are correctly labelled, even when partially oc-
cluded. Hard to detect objects where also correctly
labeled. The window behind the sofa, for instance,
which is invisible on the depth map, is correctly iden-
tified by the proposed approach.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
42
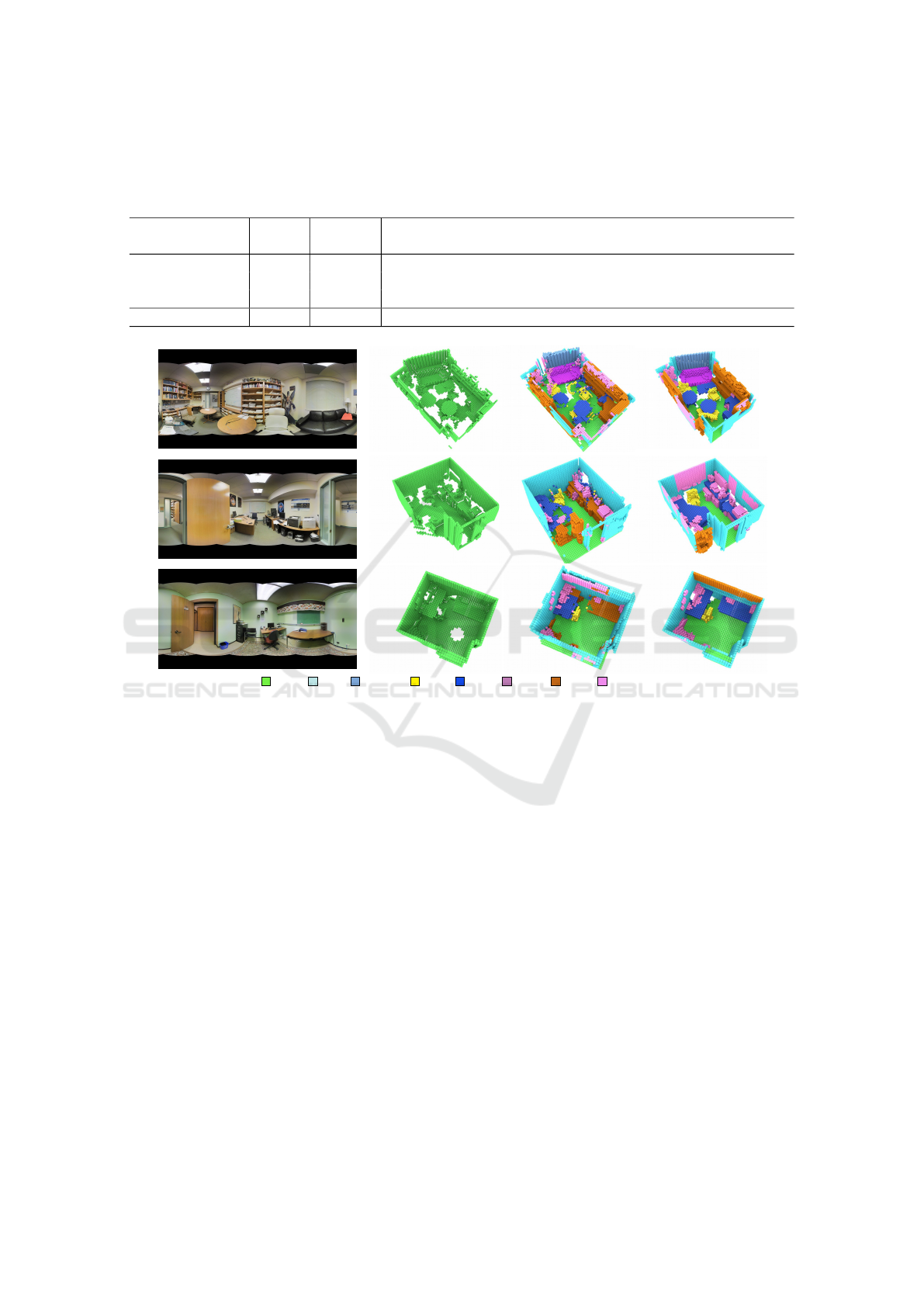
Table 1: Quantitative results. We compare our 360
◦
semantic scene completion results on Stanford 2D-3D dataset to partial
view state-of-the-art approaches in a normal RGB-D dataset (NYU). Our network had no previous knowledge of the evaluation
dataset and predicts result for the whole scene. Previous approaches where fine tuned on the target dataset and only gives a
partial prediction. Even so, our proposed solution achieved better overall results.
evaluation
model
scene semantic scene completion (IoU, in percentages)
dataset coverage ceil. floor wall win. chair bed sofa table tvs furn. objs. avg.
NYU v2 RGB-D
SSCNet
partial
15.1 94.6 24.7 10.8 17.3 53.2 45.9 15.9 13.9 31.1 12.6 30.5
SGC 17.5 75.4 25.8 6.7 15.3 53.8 42.4 11.2 0.0 33.4 11.8 26.7
EdgeNet 23.6 95.0 28.6 12.6 13.1 57.7 51.1 16.4 9.6 37.5 13.4 32.6
Stanford 2D-3D-S Ours full (360
◦
) 15.6 92.8 50.6 6.6 26.7 - 35.4 33.6 - 32.2 15.4 34.3
walloor furn. objectswindow chair table sofa
Figure 4: Stanford 2D-3D-Semantics qualitative results. From left to right: RGB image; incomplete input volume; seman-
tically completed prediction output; ground truth (best viewed in colour).
5.3 Experiments on Spherical Stereo
Images
For spherical stereo images, we first rotated them to
align to the Cartesian axis, and applied the enhance-
ment procedure described in Section 4.4. From the
resulting images we generated a point cloud and vox-
elized the surface and edges with a voxel size of
0.02m, before encoding the volumes with F-TSDF
and submitting them to the networks. Room dimen-
sions are inferred from the point clouds.
The qualitative results are shown in Figure 5.
Most of the stereo matching errors of the estimated
depth maps are fixed by our enhancement approach.
The cabinet in the extreme left part of the Meeting
Room (first scene) originally had several depth es-
timation errors due to the vertical stripped patterns,
but most errors were eliminated by the enhancement
step, though some errors still remained in dark re-
gions where borders are not clear. The lower border of
the leftmost sofa in the second scene (Usability Lab)
was not detected, and some part of its original depth
was replaced by the depth of the floor. However, the
proposed depth enhancement step improved the erro-
neous depth maps estimated by stereo matching over
the entire regions.
The SSC results with the enhanced depth maps
were also satisfactory. As in the large-scale dataset,
the levels of scene completion and semantic labelling
were high. Although the input images still carries
some depth errors, the final predictions were gener-
ally clear enough. Comparing the final predictions
from the stereo 360
◦
dataset to the ones from Stan-
ford 2D-3D-Semantics dataset, the results of spheri-
cal stereo ones are noisier than those of the scanned
counter parts, but they are still accurate. Results
demonstrate that the use of a pair of 360
◦
images gives
an inexpensive alternative to perform 360
◦
SSC for
dynamic scenes, where large-scale depth scans are not
applicable.
Semantic Scene Completion from a Single 360-Degree Image and Depth Map
43
walloor furn. objectswindow chair table sofa
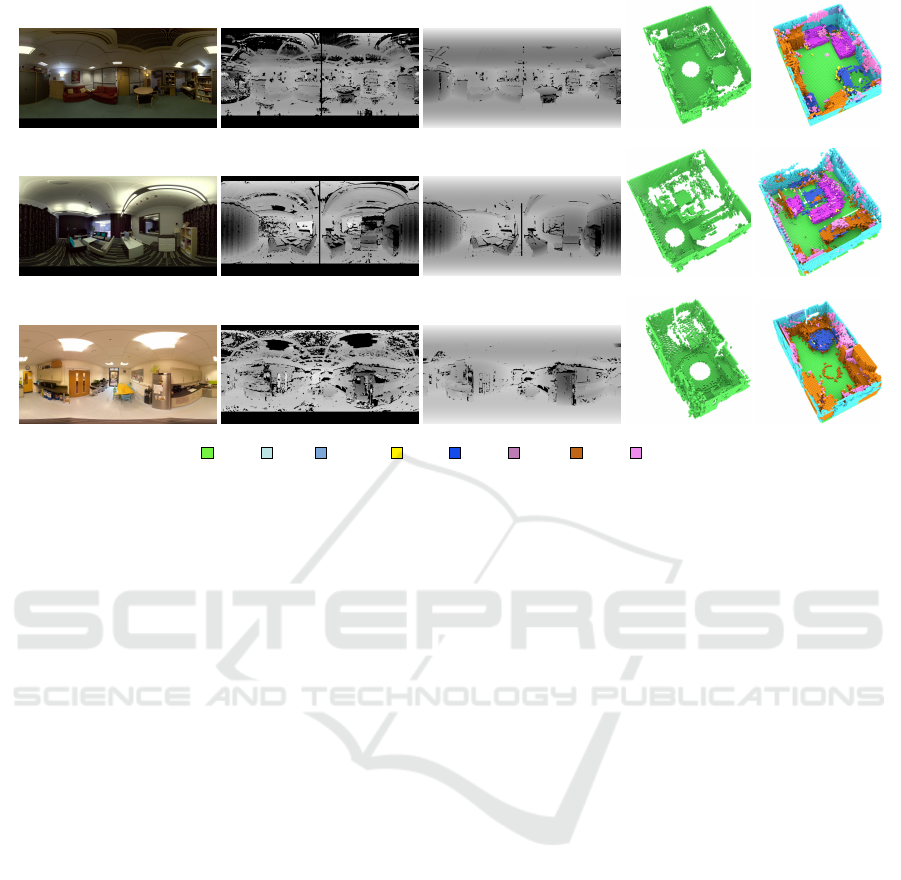
Figure 5: 360
◦
stereoscopic qualitative results. From left to right: RGB image; estimated depth map; enhanced depth map;
incomplete input volume; semantically completed output. From top to bottom: Meeting Room; Usability Lab; Kitchen. Black
regions in the estimated disparity maps are unknown regions due to ambiguous matching or stereo occlusion. Most of the
failed stereo matching are fixed after enhancement. Predicted volumes present a high level of accuracy (best viewed in colour).
6 CONCLUSION
This paper introduced the task of Semantic Scene
Completion from a pair of 360
◦
image and depth map.
Our proposed method to predict 3D voxel occupancy
and its semantic labels for a whole scene from a single
point of view can be applied to various range of im-
ages acquired from high-end sensors like Matterport
to off-the-shelf 360
◦
cameras. The proposed method
is based on a CNN which relies on existing diverse
RGB-D datasets for training. For images from spher-
ical cameras, we also presented an effective method
to enhance stereoscopic 360
◦
depth maps to be used
prior to submit the images to the SSC network.
Our method was evaluated on two distinct
datasets: the publicly available Stanford 2D-3D-
Semantics high quality large-scale scan dataset and a
collection of 360
◦
stereo images gathered with off-
the-shelf spherical cameras. Our SSC network re-
quires no previous knowledge of the datasets to per-
form the evaluation. Even so, when we compare our
results to previous approaches using RGB-D images
that only give results for part of the scene and were
trained on the target datasets, the proposed method
achieved better overall results with full coverage.
Qualitative analysis shows high levels of completion
of occluded regions on both Matteport and spherical
images. On the large-scale scan dataset, completion
levels achieved from a single point of view were su-
perior to the ones of the ground truth obtained from
multiple points of view.
The results show that our approach can be ex-
tended to applications that requires a complete un-
derstanding of dynamic scenes from images gathered
from off-the-shelf stereo cameras.
ACKNOWLEDGEMENTS
The authors would like to thank FAPDF
(fap.df.gov.br), CNPq grant PQ 314154/2018-3
(cnpq.br) and EPSRC Audio-Visual Media Platform
Grant EP/P022529/1 for the financial support to this
work. Mr. Dourado also would like to thank to TCU
(tcu.gov.br) for supporting his PhD studies.
REFERENCES
Aarts, E. and Korst, J. (1989). Simulated Annealing and
Boltzmann Machines: A Stochastic Approach to Com-
binatorial Optimization and Neural Computing. John
Wiley & Sons, Inc., New York, NY, USA.
Armeni, I., Sax, S., Zamir, A. R., and Savarese, S.
(2017). Joint2D-3D-semantic data for indoor scene
understanding. Technical Report arXiv:1702.01105,
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
44

Cornell University Library. http://arxiv.org/abs/1702.
01105.
Armeni, I., Sener, O., Zamir, A. R., Jiang, H., Brilakis, I.,
Fischer, M., and Savarese, S. (2016). 3D semantic
parsing of large-scale indoor spaces. In Proceedings
of IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), Las Vegas, NV, June 26 - July 1,
pages 1534–1543, Piscataway, NJ. IEEE.
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. In Proceedings of the
26th Annual International Conference on Machine
Learning, ICML, pages 41–48, New York, NY, USA.
ACM.
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Transactions on Pattern Analysis and
Machine Intelligence (PAMI), 8(6):679–698.
Chang, A. X., Dai, A., Funkhouser, T. A., Halber, M.,
Nießner, M., Savva, M., Song, S., Zeng, A., and
Zhang, Y. (2017). Matterport3D: Learning from RGB-
D data in indoor environments. Technical Report
arXiv:1709.06158, Cornell University Library. http:
//arxiv.org/abs/1709.06158.
Charles, R. Q., Su, H., Kaichun, M., and Guibas, L. J.
(2017). PointNet: Deep learning on point sets for
3D classification and segmentation. In Proceedings
of IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), Honolulu, Hawaii, July 21-26,
pages 77–85, Piscataway, NJ. IEEE.
Csurka, G. (2017). A comprehensive survey on domain
adaptation for visual applications. In Csurka, G., ed-
itor, Domain Adaptation in Computer Vision Applica-
tions, pages 1–35. Springer International Publishing,
Cham.
Dai, A., Ritchie, D., Bokeloh, M., Reed, S., Sturm, J.,
and Niessner, M. (2018). ScanComplete: Large-Scale
Scene Completion and Semantic Segmentation for 3D
Scans. In Proceedings of IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), Salt
Lake City, UT, June 18-22, pages 4578–4587, Piscat-
away, NJ. IEEE.
Dourado, A., de Campos, T. E., Kim, H., and Hilton, A.
(2019). EdgeNet: Semantic scene completion from
RGB-D images. Technical Report arXiv:1908.02893,
Cornell University Library. http://arxiv.org/abs/1908.
02893.
Firman, M., Aodha, O. M., Julier, S., and Brostow, G. J.
(2016). Structured prediction of unobserved voxels
from a single depth image. In Proceedings of IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), Las Vegas, NV, June 26 - July 1, pages
5431–5440, Piscataway, NJ. IEEE.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Garbade, M., Sawatzky, J., Richard, A., and Gall, J. (2018).
Two stream 3D semantic scene completion. Technical
Report arXiv:1804.03550, Cornell University Library.
http://arxiv.org/abs/1804.03550.
Guedes, A. B. S., de Campos, T. E., and Hilton, A. (2017).
Semantic scene completion combining colour and
depth: preliminary experiments. In ICCV workshop
on 3D Reconstruction Meets Semantics (3DRMS),
Venice, Italy. Event webpage: http://trimbot2020.
webhosting.rug.nl/events/events-2017/3drms/. Also
published at arXiv:1802.04735.
Guo, R., Zou, C., and Hoiem, D. (2015). Predicting com-
plete 3D models of indoor scenes. Technical Report
arXiv:1504.02437, Cornell University Library. http:
//arxiv.org/abs/1504.02437.
Guo, Y. and Tong, X. (2018). View-Volume Network for
Semantic Scene Completion from a Single Depth Im-
age. In Proceedings of the Twenty-Seventh Inter-
national Joint Conference on Artificial Intelligence,
pages 726–732, Stockholm, Sweden. International
Joint Conferences on Artificial Intelligence Organiza-
tion.
Gupta, A., Efros, A. A., and Hebert, M. (2010). Blocks
world revisited: Image understanding using qual-
itative geometry and mechanics. In Proceedings
of 11th European Conference on Computer Vision
(ECCV), Crete, Greece, September 5-11, pages 482–
496, Berlin, Heidelberg. Springer Berlin Heidelberg.
Gupta, S., Arbel
´
aez, P., and Malik, J. (2013). Perceptual
organization and recognition of indoor scenes from
rgb-d images. In Proceedings of IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
Portland, OR, June 23-28, pages 564–571, Piscat-
away, NJ. IEEE.
Handa, A., Patraucean, V., Badrinarayanan, V., Stent, S.,
and Cipolla, R. (2015). SceneNet: Understanding real
world indoor scenes with synthetic data. Technical
Report arXiv:1511.07041, Cornell University Library.
http://arxiv.org/abs/1511.07041.
Kim, H. and Hilton, A. (2013). 3D scene reconstruction
from multiple spherical stereo pairs. Int Journal of
Computer Vision (IJCV), 104(1):94–116.
Kim, H. and Hilton, A. (2015). Block world reconstruction
from spherical stereo image pairs. Computer Vision
and Image Understanding (CVIU), 139(C):104–121.
Kim, H., Remaggi, L., Jackson, P. J., and Hilton, A. (2019).
Immersive spatial audio reproduction for VR/AR us-
ing room acoustic modelling from 360 images. In Pro-
ceedings of 26th IEEE Conference on Virtual Real-
ity and 3D User Interfaces, Osaka Japan, Piscataway,
NJ. IEEE.
Kittler, J., Hatef, M., Duin, R. P. W., and Matas, J. (1998).
On combining classifiers. IEEE Transactions on
Pattern Analysis and Machine Intelligence (PAMI),
20(3):226–239.
Li, S. (2006). Real-time spherical stereo. In Proceedings
of International Conference on Pattern Recognition
(ICPR), pages 1046–1049, Piscataway, NJ. IEEE.
Liu, F., Li, S., Zhang, L., Zhou, C., Ye, R., Wang, Y.,
and Lu, J. (2017). 3DCNN-DQN-RNN: A deep re-
inforcement learning framework for semantic pars-
ing of large-scale 3D point clouds. In Proceedings
of 16th International Conference on Computer Vision
(ICCV), Venice, Italy, pages 5679–5688, Piscataway,
NJ. IEEE.
Liu, S., HU, Y., Zeng, Y., Tang, Q., Jin, B., Han, Y.,
and Li, X. (2018). See and think: Disentangling se-
mantic scene completion. In Bengio, S., Wallach,
H., Larochelle, H., Grauman, K., Cesa-Bianchi, N.,
Semantic Scene Completion from a Single 360-Degree Image and Depth Map
45

and Garnett, R., editors, Procedings of Conference
on Neural Information Processing Systems 31 (NIPS),
pages 263–274, Reed Hook, NY. Curran Associates,
Inc.
Nguyen, D. T., Hua, B., Tran, M., Pham, Q., and Yeung,
S. (2016). A field model for repairing 3D shapes. In
Proceedings of IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), Las Vegas, NV, June
26 - July 1, pages 5676–5684, Piscataway, NJ. IEEE.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017a). Point-
Net++: Deep hierarchical feature learning on point
sets in a metric space. In Guyon, I., Luxburg, U. V.,
Bengio, S., Wallach, H., Fergus, R., Vishwanathan,
S., and Garnett, R., editors, Procedings of Confer-
ence on Neural Information Processing Systems 30
(NIPS), pages 5099–5108. Curran Associates, Inc.,
Reed Hook, NY.
Qi, X., Liao, R., Jia, J., Fidler, S., and Urtasun, R. (2017b).
3D graph neural networks for RGBD semantic seg-
mentation. In Proceedings of 16th International Con-
ference on Computer Vision (ICCV), Venice, Italy,
pages 5209–5218, Piscataway, NJ. IEEE.
Ren, X., Bo, L., and Fox, D. (2012). RGB-(D) scene label-
ing: Features and algorithms. In Proceedings of IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), Providence, RI, June 16-21, pages 2759–
2766, Piscataway, NJ. IEEE.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional networks for biomedical image seg-
mentation. In Navab, N., Hornegger, J., Wells, W. M.,
and Frangi, A. F., editors, Medical Image Computing
and Computer-Assisted Intervention (MICCAI), pages
234–241, Cham. Springer International Publishing.
Schoenbein, M. and Geiger, A. (2014). Omnidirectional
3D reconstruction in augmented manhattan worlds. In
Proceedings of IEEE/RSJ Conference on Intelligent
Robots and Systems IROS, pages 716 – 723, Piscat-
away, NJ. IEEE.
Shrivastava, A. and Mulam, H. (2013). Building part-based
object detectors via 3D geometry. In Proceedings
of IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), Portland, OR, June 23-28, pages
1745–1752, Piscataway, NJ. IEEE.
Silberman, N. and Fergus, R. (2011). Indoor scene segmen-
tation using a structured light sensor. In IEEE Inter-
national Conference on Computer Vision Workshops
(ICCV Workshops), pages 601–608, Piscataway, NJ.
IEEE.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R.
(2012). Indoor segmentation and support inference
from RGBD images. In Fitzgibbon, A., Lazebnik,
S., Perona, P., Sato, Y., and Schmid, C., editors, Pro-
ceedings of 12th European Conference on Computer
Vision (ECCV), Florence, Italy, October 7-13, pages
746–760, Berlin, Heidelberg. Springer Berlin Heidel-
berg.
Smith, L. N. (2018). A disciplined approach to neural net-
work hyper-parameters: Part 1 - learning rate, batch
size, momentum, and weight decay. Technical Re-
port arXiv:1803.09820, Cornell University Library.
http://arxiv.org/abs/1803.09820.
Song, S., Yu, F., Zeng, A., Chang, A. X., Savva, M., and
Funkhouser, T. (2017). Semantic Scene Completion
from a Single Depth Image. In Proceedings of IEEE
Conference on Computer Vision and Pattern Recog-
nition (CVPR), Honolulu, Hawaii, July 21-26, pages
190–198, Piscataway, NJ. IEEE.
Song, S., Zeng, A., Chang, A. X., Savva, M., Savarese, S.,
and Funkhouser, T. (2018). Im2Pano3D: Extrapolat-
ing 360
◦
structure and semantics beyond the field of
view. In Proceedings of IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), Salt
Lake City, UT, June 18-22, pages 3847–3856, Piscat-
away, NJ. IEEE.
Zhang, J., Zhao, H., Yao, A., Chen, Y., Zhang, L., and
Liao, H. (2018a). Efficient semantic scene comple-
tion network with spatial group convolution. In Pro-
ceedings of 15th European Conference on Computer
Vision (ECCV), Munich, Germany, September 8-14,
pages 749–765, Cham. Springer International Pub-
lishing.
Zhang, L., Wang, L., Zhang, X., Shen, P., Bennamoun, M.,
Zhu, G., Shah, S. A. A., and Song, J. (2018b). Seman-
tic scene completion with dense CRF from a single
depth image. Neurocomputing, 318:182–195.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
46
