
Force Monitor for Training Manual Skills in the Training of
Chiropractors
Juan-Mario Gruber
1
, Daniel Mühlemann
2
, Darius Eckhardt
1
and Ibrahim Evren
1
1
Institute of Embedded Systems Zurich University of Applied Sciences, Winterthur, Switzerland
2
Department of Chiropractic Medicine, University of Zurich, Switzerland
Keywords: Spinal Manipulation, Training, Skill, Biomechanics, Teaching Aid, Force Monitoring Device, Biofeedback.
Abstract: As part of their training, students of Chiropractic Medicine at Zürich are trained to acquire and then improve
their manual and manipulative skills, especially their ability to deliver manipulative thrusts with a defined
preloading force, an impulse that is delivered with an adequate and reproducible force within a defined time
without letting up on the preload-pressure. In order to facilitate this process, objective feedback is
paramount. This led to the idea of developing a force-measurement and -monitoring system. The newly
developed system consists of a wireless device with a force sensor and an app that is running on standard
smartphones. The device records the force applied to the sensor and transmits it via Bluetooth Low Energy
(BLE) to the app. There it is visualised as a graph and can be evaluated. The system allows us to provide all
students with a tool to develop their manual skills, and especially their thrusting technique. As the feedback
given by the system can be recorded, progress can be monitored and students can be mentored accurately
according to their strengths and weaknesses.
1 INTRODUCTION
Chiropractic Medicine at Zürich University is a 6-
year program consisting of a 3-year Bachelor’s
degree in Medicine and a 3-year Master’s degree in
Chiropractic Medicine at the university’s medical
faculty. Throughout the curriculum, students are
instructed and trained to acquire and then constantly
improve their manual and manipulative skills.
To support the students training it is necessary
for the instructors to be able to give objective
feedback.
2 FAST, ACURATE AND
REPRODUCABLE MANUAL
THRUSTS
One particular challenge has been to train the
student’s ability to deliver manipulative thrusts with
a defined preloading force, an impulse that is
delivered with an adequate and reproducible force
within a time of 100-150 ms without letting up on
the preload-pressure.
2.1 Typical Force Path
A graph showing the correct delivery of a high
velocity, low amplitude thrust is shown in figure 1.
Figure 1: Correct delivery of a high velocity, low
amplitude thrust (Triano et al., 2004; Triano et al., 2002;
Triano et al., 2012).
The challenge is to deliver a reproducible preload-
force, which may vary with the technique, then a
fast, accurate, and reproducible thrust (impulse),
which may vary again according to the technique
chosen and then to back off completely as fast as
possible (unload). The slew rate in both delivering
Force [N]
Max. preload
force [N]
Peak of force [N]
Thrust duration [ms]
Time [ms]
Resolution
phase
Preload
period phase
Thrust
phase
Gruber, J., Mühlemann, D., Eckhardt, D. and Evren, I.
Force Monitor for Training Manual Skills in the Training of Chiropractors.
DOI: 10.5220/0008902100810085
In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020) - Volume 1: BIODEVICES, pages 81-85
ISBN: 978-989-758-398-8; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
81
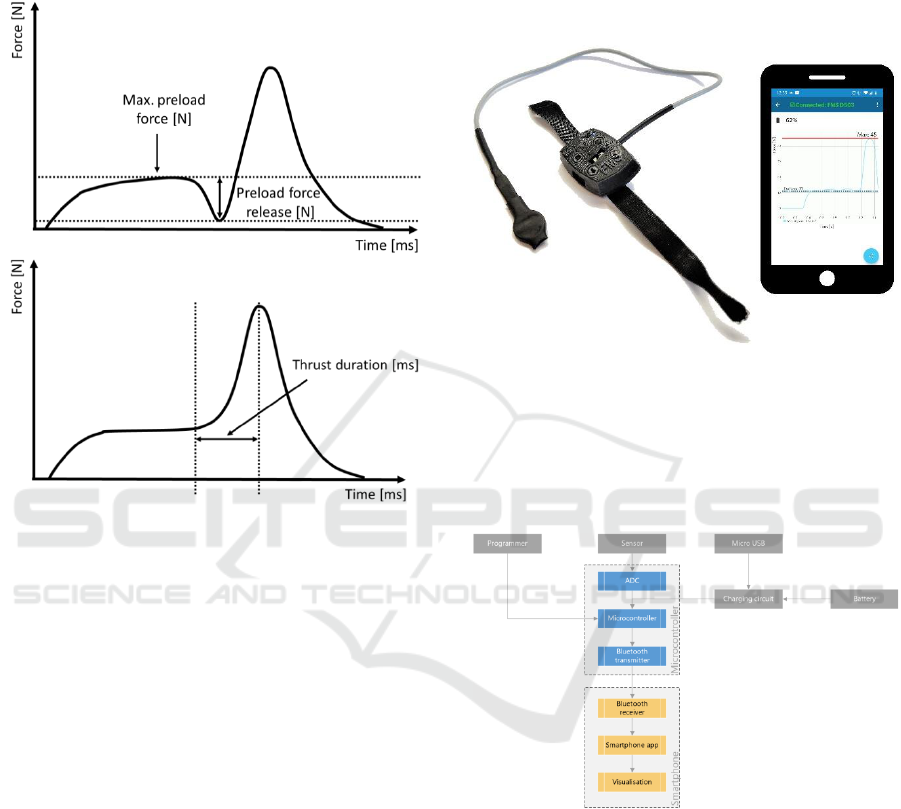
the impulse as well as in unloading must be as high
as possible, the impulse as a whole as short as
possible. A typical mistake is to reduce the preload
prior to thrust-delivery (figure 2, upper graph).
Figure 2: Incorrect delivery (upper graph) against correct
delivery (lower graph).
2.2 Using Force Measurement Systems
in Chiropractic Education
In the past years, force sensors have been developed
to visualize the impulses delivered.
The students are able to analyse and compare the
force path during practice. To improve mobility and
handling, the latest version works with a force
sensor connected via Bluetooth to a smartphone to
visualize the data.
This newly developed system allows us to
provide all students with a tool to develop their
manual skills, and especially their thrusting
technique. As the feedback given by the system can
be recorded, progress can be monitored and students
can be mentored accurately according to their
strengths and weaknesses.
3 FORCE MONITORING DEVICE
The developed system consists of a wireless device
with a force sensor and an app that is running on
standard smartphones. Figure 3 is showing the
prototype.
The device measures an applied force and transmits
it via Bluetooth Low Energy (BLE) to the
smartphone. The app evaluates the data and displays
it as a graph.
Figure 3: Prototype.
3.1 System Concept
The System consists of two main parts: The
embedded electronics with sensor and the
smartphone application (Figure 4).
Figure 4: System Block Diagram.
The sensor measures the applied force. The
microcontroller device reads the analogue data,
converts it into digital data and transmits it via
Bluetooth Low Energy to the smartphone. An
Android app receives the data, does calculations and
visualises it as a graph. Further data analysis is made
to show a preload-force and the maximum force. In
addition, the data can be exported and shared. The
device and the app are simple to use.
BIODEVICES 2020 - 13th International Conference on Biomedical Electronics and Devices
82
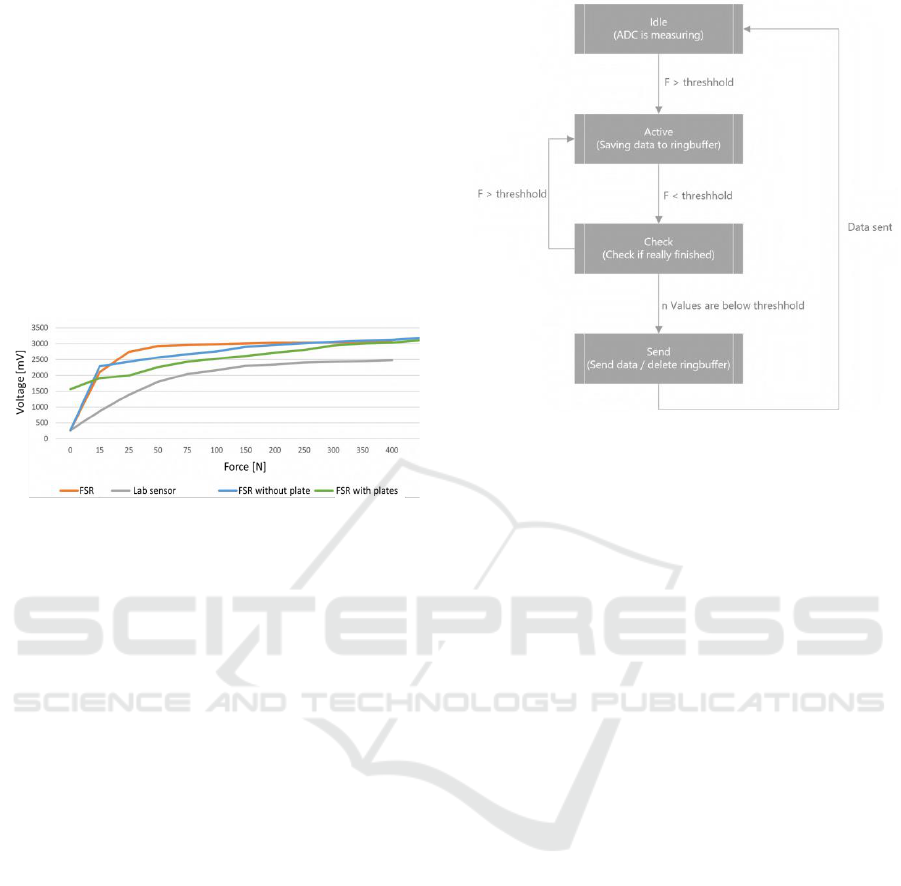
3.2 Sensor
The sensor is built of a force sensitive resistor (FSR)
in combination with two metal plates. It changes the
resistance when a force is applied. The sensor is
quite affordable, but it is nonlinear. This is why it
needs additional compensation during calibration.
During calibration an accurate piezoelectric sensor is
used as reference and mounted into a hand press.
Several reference points are measured over a range
of 500 Newton and interpolated for the FSR. This
results in a reasonable accuracy of the FSR (Figure
5).
Figure 5: Sensor calibration of different sensor types.
3.3 Measurement Device
The measure device is in a custom-built case. It is
worn at the wrist of the user.
For the prototype this case is produced with a 3D
printer based on the stereolithographic (SLA)
principle. The electronics are integrated on a custom
printed circuit board (PCB). A system on chip (SoC)
from Nordic Integrated, the nRF52840 model, is the
core of the device. This is a Microcontroller with a
built in Bluetooth module. The device is powered by
a rechargeable lithium battery. It can be charged by
a micro USB connector. The sensor is attached to a
short cable, which allows the user to measure a force
at different positions, such as at the heel of the hand.
By sliding the main switch, the device is
powered on and is visible over BLE. When
connected to the app, the device starts to read the
sensor data (Figure 6).
As soon as a force is applied to the force sensor,
the device is recording the data. When the sensor is
released, the raw sensor data is converted into a
force and transmitted over BLE to the app.
Figure 6: State Machine Measurement.
3.4 Smartphone Application
An Android App has been developed as a user-
friendly interface. The aim of the App is to visualize
the applied Force and highlight for chiropractor
students useful data such as the peak force and the
preload force of an exercise (Figure 7).
When a measurement is started a starting flag is
sent to display this in the app. At the end of a
measurement the data is transmitted to the app.
The data evaluation starts as soon as the required
measurement data has been received. The starter
packet passes a byte with the value 0x6 and lets the
display know that the measurement has started.
Before visualization, the received bytes are checked
for completeness and then buffered in a 2-
dimensional array. For the representation an array
list with the respective x- and y-coordinates is
created. The x-axis is defined by the scanning
frequency and can be returned for the respective y-
values. The graph is plotted and the maximum force
as well as the pre-force is shown as numbers. This
helps the chiropractic students to assess whether the
impulse was produced directly after the pre-pressure
or whether the pre-pressure has decreased.
Furthermore an export function has been added to
save the measured force locally on the phone and to
share the .csv File via installed Apps on the
Smartphone.
Force Monitor for Training Manual Skills in the Training of Chiropractors
83
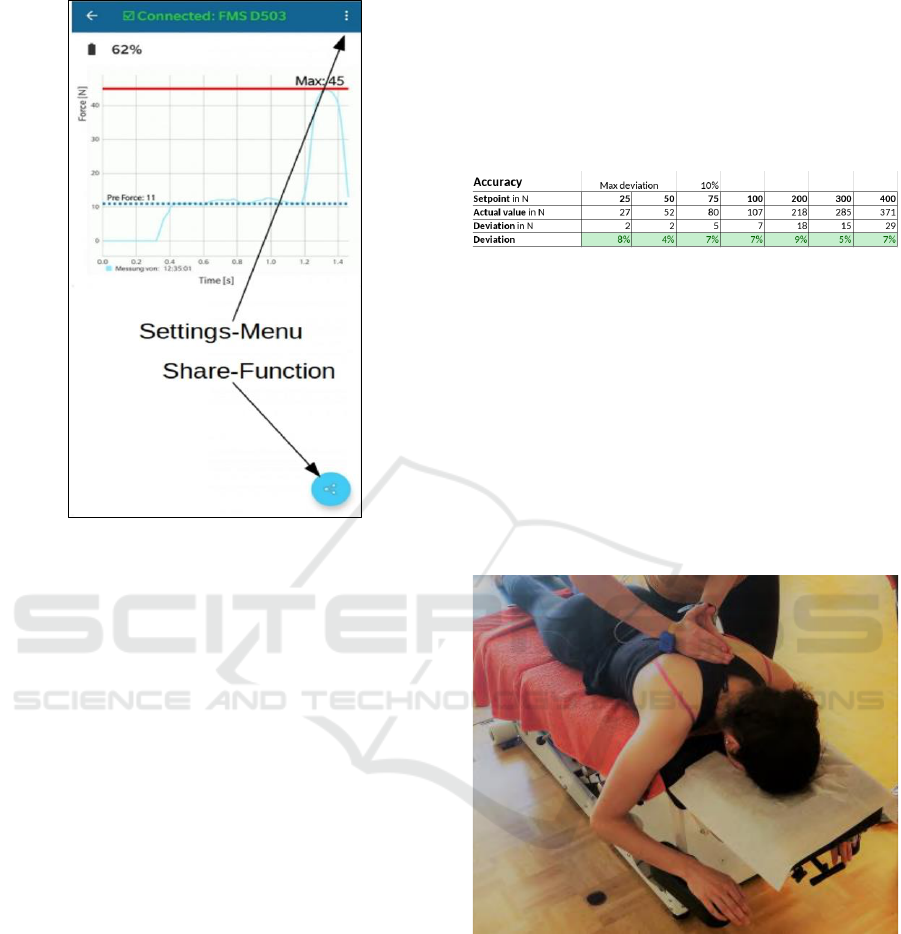
Figure 7: App showing force diagram.
3.5 Wireless Communication
The Connection between the Device and the
Smartphone is established via Bluetooth Low
Energy, while the Smartphone acts as the BLE-
Central and the device as the BLE-Peripheral. The
Connection can be established in three steps
assuming the device is switched ‘On’. The device
starts in Advertising-Mode automatically. The app
scans at start for nearby compatible devices which
are advertising and will show a list of all available
FMS-devices. After choosing a device a connection
using BLE GATT will be established and the system
is ready for data transfer of measured values.
4 DEVICE TESTS AND
CONCLUSIONS
4.1 Test Setup
The device was tested for accuracy and consistency
with an accurate piezoelectric sensor and a hand
press. Furthermore, the battery duration was tested.
Finally, the device was tested by chiropractor
students. Primarily the user friendliness and the
utility of the system were tested.
4.2 Lab Tests
During the accuracy test of the force value the
medium deviancy from the actual value was 7%
(Table 1).
Table 1: Sensor Accuracy.
This is in the acceptable range, because the relative
value is more important than the absolute. In the
consistency test the mean deviation was 9 Newton.
The battery test identified a system uptime of almost
50 hours. This means that the device needs to be
recharged after 24 days if it is used for two hours per
day.
4.3 Practical Tests
At Zürich University instrumented bio-feedback has
been used for teaching motor skills for a few years
with a predecessor device.
Figure 8: Device Test at University Zurich.
The results regarding the improvement of motor-
and manipulative skills of the students are very
good. The students appreciate the immediate
feedback on their performance and are motivated to
take the initiative to improve on their manual skills-
deficits.
The new model is easier to use, as it is highly
portable and, using a smartphone interface, PC-
independent which will make it very attractive for
the students. The feedback from our students of
BIODEVICES 2020 - 13th International Conference on Biomedical Electronics and Devices
84

Chiropractic Medicine was mostly positive (Figure
9).
Figure 9: Feedback from Acceptance Test.
88% liked the device very much, the others liked it.
No one had problems connecting the device to the
app. 81% would appreciate it if there was as well an
iOS app for the system.
REFERENCES
Triano Jj1, Bougie J, Rogers C, Scaringe J, Sorrels K,
Skogsbergh D, Mior S., 2004. Procedural skills in
spinal manipulation: do prerequisites matter?. In The
Spine Journal. Sep-Oct;4(5):557-63.
Triano JJ1, Rogers CM, Combs S, Potts D, Sorrels K.,
2002. Developing skilled performance of lumbar spine
manipulation. In Journal of manipulative and
physiological therapeutics. Jul-Aug;25(6):353-61.
Triano Jj1, Descarreaux M, Dugas C., 2012.
Biomechanics--review of approaches for performance
training in spinal manipulation. In Journal of
electromyography and kinesiology. Oct;22(5):732-9.
Force Monitor for Training Manual Skills in the Training of Chiropractors
85
