
A Feature-based Approach for Identifying Soccer Moves using an
Accelerometer Sensor
Omar Alobaid and Lakshmish Ramaswamy
Department of Computer Science, University of Georgia, Athens, Georgia, U.S.A.
Keywords:
Soccer, Activity Recognition, Accelerometer, Sensor.
Abstract:
During the past decade, Human Activity Recognition (HAR) systems have been an evolving topic due to the
popularity of smart devices. Recognizing soccer moves in real-time is an important research problem that has
not yet been studied thoroughly in the literature. In contrast to daily physical activities, recognizing soccer
moves poses a set of unique challenges, such as pattern irregularity and body positions when performing
these moves. In this paper, our goal is to recognize soccer moves in real-time by utilizing accelerometer
data. We explore three different feature-based algorithms: Time Series Forest, Fast Shapelets, and Bag-of-
SFA-Symbols. We also examine different factors that can affect the performance of these algorithms, such
as parameter tuning and accelerometer axis elimination. Additionally, we introduce a novel collaborative
model consisting of the above-mentioned algorithms in a majority voting mechanism to further enhance the
performance of the system. We also add a light-weight classifier to act as a tie breaker in case of disagreement
between the classifiers. We experimentally choose the right parameters to reduce the training time drastically
without forfeiting the level of accuracy. Our collaborative model outperforms the single model by 2% to reach
84% in accuracy with a decrease in the training time by one order of magnitude.
1 INTRODUCTION
In the past decade, there has been rapid development
of Ubiquitous Computing involvement in our daily
lives. Smart phones, smart watches, and smart clothes
are examples of this technological explosion. These
smart devices are usually equipped with sensors that
can be utilized to serve numerous purposes. One of
these sensors is the Accelerometer, which measures
the change of velocity in m/s
2
in 3 dimensions. Be-
cause of its low power consumption, the accelerome-
ter sensor is frequently used to achieve different tasks,
such as device orientation and user’s physical activity.
Accelerometer data can be viewed as a time series
since it is a sequence of data points that are observed
over time. Time Series analysis is a major subject of
interest within the area of Data Mining. Time Series
analysis tasks include forecasting (De Gooijer and
Hyndman, 2006), querying (Hochheiser and Shnei-
derman, 2004), clustering (Liao, 2005), and classi-
fication (Xi et al., 2006). Time Series classifica-
tion has been used by researchers in various domains,
such as in medical (Kurbalija et al., 2014), biologi-
cal (Tapinos, 2013), and geographical (Campbell and
Diebold, 2005) sciences.
In recent years, there has been rising interest in
recognizing human activity by using mobile sensors
(Anguita et al., 2012) (Bayat et al., 2014) (Wan et al.,
2015). Human Activity Recognition (HAR) systems
can be delineated into three categories (Lara et al.,
2013): external sensors, wearable sensors, and hy-
brid. Our focus in this paper is on wearable systems
for the cost, size, and convenience of these systems
compared to external sensor systems.
Soccer, as one of the most popular sports around
the world, also offers a unique opportunity for real-
time application software. There are many real-time
applications that track human activity, such as Apple
Health and Google Fit. However, none of these ap-
plications recognize soccer moves in real-time. Im-
plementing an affordable system that recognizes and
tracks basic soccer moves in real-time is desirable to
develop players’ soccer skills. As thousands of play-
ers practice soccer every day, having a real-time de-
tection system would assist in tracking this multitude
of training sessions. Our system can be extended to
analyze players’ performance. For example, coaches
may instruct players to perform a number of shots in
order to improve shooting skills. Instead of manually
counting the number of shots, those players can use
the proposed system to track number of shots taken in
real-time.
34
Alobaid, O. and Ramaswamy, L.
A Feature-based Approach for Identifying Soccer Moves using an Accelerometer Sensor.
DOI: 10.5220/0008910400340044
In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020) - Volume 5: HEALTHINF, pages 34-44
ISBN: 978-989-758-398-8; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Besides typical HAR system challenges, soccer
poses other unique challenges. First, soccer moves
have fast and irregular patterns, which make them
harder to distinguish compared to other daily physi-
cal activities. Second, players might use either foot
while playing, which makes the determination of sen-
sor placement a crucial decision. Our research goal is
to utilize accelerometer data to recognize basic soccer
moves performed by a player in a training session in
real-time without extra hardware.
In this paper, we applied feature-based algorithms
which typically extract meaningful features from the
data to be used in classification. The contributions
of this paper include: first, evaluate three differ-
ent feature-based algorithms: Time Series Forest,
Fast Shapelets, and Bag-of-SFA-Symbols, which rep-
resent different approaches- interval, Shapelet, and
Dictionary-based- to recognize soccer moves; second,
analyze the performance of these algorithms in terms
of accuracy and training time when the parameters are
tuned; third, we propose a voting approach composed
from the aforementioned algorithms to enhance accu-
racy. From this study, our results show that soccer
moves can be recognized in real-time with an accu-
racy of 84%.
2 RELATED WORK
Wearable sensor systems can be divided into two
types based on the learning approach: semi-
supervised and supervised.
• Semi-supervised: the model uses labeled and un-
labeled data in the training phase. This approach
is attractive to researchers because having labeled
data requires human resources to label it. Human
labeling becomes an unpractical approach when
the dataset is particularly large. However, obtain-
ing unlabeled data is easier, and it eliminates la-
beling cost (Guan et al., 2007). The authors in
(Radu et al., 2014) aimed to detect whether the
user is indoor or outdoor by employing a semi-
supervised approach as follows: use some of the
labeled data to assign a label(s) to clustered unla-
beled data; train a classifier on small label data,
then tune the classifier based on the unlabeled
data; and utilize collaborative learning, where
classifiers can enhance their performance by mu-
tual learning. In (Ghazvininejad et al., 2011), the
authors used a small portion of the labeled data in
a graph-based method. They calculated the asso-
ciation probability of each class using a k-nearest
neighbor graph. Then, these probabilities were
fed into the Hidden Markov Model to classify un-
seen examples.
• Supervised: the model uses labeled data only in
the training. This approach is the most popular
approach in HAR systems. In (Lee et al., 2017),
walking and running were identified with an ac-
curacy of 92% by training a Convolutional Neu-
ral Network. The researchers in (Kwapisz et al.,
2011) recognized daily activities by training logis-
tic regressions, decision trees, and multilayer neu-
ral network classifiers. Similarly, (Yazdansepas
et al., ), the researchers utilized a Shapelet-based
approach to recognize ambulatory activities in
real time with a high accuracy compared to off-
line systems.
3 MOTIVATION &
BACKGROUND
Nowadays, there are many commercial HAR systems
that help users to track their physical activity in real-
time, such as Fitbit, Apple, Garmin, and Android
watches. However, these watches are usually limited
to a number of general activities like running, walk-
ing, and swimming. Our goal in this research is to
recognize a different and more intense type of sport
in real-time. For this, we chose soccer, because it is
the world’s most popular sport (Dunning, 2013). With
millions around the world playing this sport, an af-
fordable system, that can track players’ soccer moves
during training sessions in real time, can help to im-
prove players’ performances. Furthermore, to the best
of our knowledge, identifying soccer actions in real
time using the accelerometer sensor has not yet been
discussed in the literature. It is worth mentioning
that soccer moves are harder to recognize compared
to daily activities, because soccer moves are fast and
irregular, compared to activities like walking and run-
ning. A related point to consider is that players have
different techniques to perform these moves. Build-
ing a player-independent platform to recognize these
moves is a significant feature of our system.
Our research objective is to build a player-
independent platform to identify soccer moves in
real-time utilizing accelerometer data. One of the
possible approaches for real-time classification is to
apply time series classification algorithms. We apply
lightweight feature-based algorithms to classify
streaming data on-the-fly with minimal overhead
on resource-constrained mobile devices. Though
machine learning algorithms are most popular in
HAR studies, most of these algorithms require high
A Feature-based Approach for Identifying Soccer Moves using an Accelerometer Sensor
35

computational resources to extract and determine
the most important features. As such, feature-based
algorithms are more efficient when paired with
accelerometer data on mobile devices.
In our research, we focused on the following moves:
shooting the ball, passing the ball, heading the
ball, running, and dribbling. We chose these moves
because these are the basic moves in soccer.
Time series classification is a classic problem in
the Time Series analysis domain. Classifying un-
known instances is a desired goal in real-life appli-
cations. There are two main approaches to classify
time series (Baydogan et al., 2013): instance-based
and feature-based. In this section we will discuss the
instance-based approach. The feature-based approach
will be discussed in the next section.
3.1 Instance-based
This approach uses a similarity measure between the
new instance and the training instances. Euclidean
Distance and Dynamic Time Warping are examples
of this approach. The instance-based approach is
characterized by its simplicity. On the other hand,
it only works well with short time series and does
not generalize well to long and noisy time series
(Sch
¨
afer, 2015).
3.1.1 Euclidean Distance
This method measures the straight distance between
two data points in the Euclidean space.
In 3-dimensional space, calculating the Euclidean
Distance between two points from the accelerometer
sensor is shown in Equation 1:
ED(p,q) =
q
(p
x
−q
x
)
2
+ (p
y
−q
y
)
2
+ (p
z
−q
z
)
2
(1)
Euclidean Distance is widely used due to its effi-
ciency and simplicity. However, it does not perform
well in most cases due its sensitivity to distortion
(Ratanamahatana and Keogh, 2004) and intolerance
to time shifting.
3.1.2 Dynamic Time Warping (DTW)
Dynamic Time Warping (Ratanamahatana and
Keogh, 2004) performs non-linear matching between
two series by reducing the distance between the time
series. This approach was proposed to overcome
Euclidean Distance’s weakness to distortion and time
shifting. Dynamic Time Warping showed superb
performance in many applications. Nonetheless, the
main disadvantage of Dynamic Time Warping is its
time complexity O(n
2
) where n is the length of the
time series. There are variations of DTW, such as
Weighted DTW (Jeong et al., 2011) and Time warp
edit distance (TWED) (Marteau, 2009). Weighted
DTW assigns less weight to points that have the
largest difference between a training point and a test-
ing point. This step aims to reduce the outliers effect
on the classification. On the other hand, Time warp
edit distance (TWED) introduces a parameter called
stiffness which controls the flexibility of TWED. The
Stiffness parameter compromises between infinite
stiffness in Euclidean Distance and zero stiffness in
Dynamic Time Warping (DTW).
4 FEATURE-BASED SOCCER
MOVES IDENTIFICATION
The feature-based approach generates features from
time series to be compared instead of similarity mea-
sures in the instance-based method. Feature-based
is usually faster than instance-based when it uses
fast feature extraction and classification algorithms
(Baydogan et al., 2013). Feature-based can be
divided into three types: Interval, Shapelets, and
Dictionary. The following taxonomy and examples
are adapted from (Bagnall et al., 2017).
4.0.1 Time Series Forest (TSF)
TSF (Deng et al., 2013) is a tree-ensemble that de-
ploys Random Forest sampling approach to reduce
the feature space for intervals. TSF samples
√
m in-
tervals where m = T S.length. Using this approach
reduces the feature space drastically from O(m
2
) to
O(m). For each interval, mean, standard deviation,
and slope are calculated. These features are used to
distinguish between different soccer moves. For ex-
ample, mean can be used to distinguish between head-
ing and passing the ball, since mean value of the ver-
tical axis in heading will be higher than passing (i.e.
most players jump to head the ball which results in
higher values on the vertical axis). TSF uses En-
tropy and Distance to spot best splits in the trees if the
node exceeds a threshold. The goal of the Entropy is
to determine the most discriminated/ disparate nodes
which can distinctly separate the classes. In many
cases, there will be more than one possible split. To
break this tie, the distance will be measured between
the candidate threshold and the nearest feature value.
HEALTHINF 2020 - 13th International Conference on Health Informatics
36

One of the main advantages of TSF is the ability to
train trees independently, which allows for parallel
training. To classify an unseen example, TSF assigns
a label based on a majority voting approach.
4.0.2 Fast Shapelets
Fast Shapelet (Rakthanmanon and Keogh, 2013) is a
heuristic algorithm. It converts the time series’ real
values into an alphabetical representation. The pur-
pose of the conversion is to reduce the search cost,
since the values range is limited. Another major
purpose of the conversion is to hash the data to in-
crease the search accuracy by utilizing collision his-
tory. In soccer, different moves have different signal
amplitudes which will result in different SAX repre-
sentations. For instance, passing, and shooting have
roughly similar signal patterns, but in different ampli-
tudes. Utilizing the SAX representation in this case
helps to differentiate between the two classes. In ad-
dition, the SAX representation helps reduce the vari-
ety of move patterns from each player.
Fast Shapelet uses a sliding window technique to con-
vert the data to a SAX representation. Because the
window size has a length less than the time series
segment, there will be multiple SAX words that re-
fer to the same time series segment. However, this
will lead to false dismissals where two nearly identi-
cal segments could create two different SAX words.
Random Projection was proposed by the authors to
solve this issue. For example, if there are words on
a length of 5, then Random Projection masks 2 po-
sitions to produce words on a length of 3. This ap-
proach will increase the chance that two similar SAX
words are mapped to the same masked word. After
r iterations, distinguishing power will be calculated
to differentiate between words that strongly represent
the same class while hardly appearing in any other
class.
4.0.3 Bag-of-SFA-Symbols
Bag-of-SFA-Symbols (BOSS) (Sch
¨
afer, 2015) is a
bag-of-words model that uses a structural-based ap-
proach to extract representative features. BOSS con-
verts the raw time series into various substructures
by applying Symbolic Fourier Approximation (SFA).
SFA utilizes Fourier Transform and Multiple Coeffi-
cient Binning to achieve approximation and quanti-
zation. SFA reduces the noise of these substructures
by applying low pass filtering to facilitate the work of
string matching algorithms.
BOSS applies a sliding window. Each window is
normalized for amplitude invariance, and the mean
normalization is enabled depending on the time series
nature. In soccer, the mean is an important feature to
separate between different moves. For instance, body
movement in shooting is more intense than passing,
which will increase the mean sensor reading values.
In Section 6, we showed the importance of the mean
on classification accuracy. For each window, SFA
is applied. Because adjacent windows have a high
chance of being identical windows, numerosity reduc-
tion is applied to avoid over-counting a substructure.
Finally, BOSS creates a histogram of the SFA words.
A modified version of Euclidean Distance is used to
measure the distance between words. To classify any
new unseen instance, BOSS deploys a 1-NN search
algorithm to find the nearest hit.
5 ARCHITECTURE
In this paper, we conduct comprehensive experi-
ments to recognize soccer movements and compare
the performance between 3 different feature-based al-
gorithms: Time series forest (TSF), Fast Shapelets
(FS) from, and Bag-of-SFA-Symbols (BOSS). The
main objective is to find the most accurate, yet effi-
cient algorithm to achieve the recognition tasks. Af-
ter we examine different algorithms, we propose a
novel collaborative model composed from the above-
mentioned algorithms. The following subsections ex-
plain the workflow of our system.
5.1 Data Collection
The data was collected from 16 players between 18
and 35 years old. Each player performed different
soccer actions: shooting the ball, passing the ball,
heading the ball, running, and dribbling. To collect
the data, a Samsung Galaxy S5 was used to record
the accelerometer data using the Sensor Kinetics Ap-
plication (INNOVENTIONS
R
, 2017) at a 100 Hz
sampling rate. Every player wore a belt to hold the
phone in the abdomen area. The central abdomen area
was chosen intentionally to help the system recognize
moves from players regardless of their dominant foot.
5.2 Signal Denoising
The accelerometer sensor is sensitive to even the
weakest movement, which leads to unwanted data in
recognition tasks. To overcome this issue, signal de-
noising/smoothing is applied. There are many sig-
nal denoising methods (Lorenz, ), such as Wavelt and
A Feature-based Approach for Identifying Soccer Moves using an Accelerometer Sensor
37
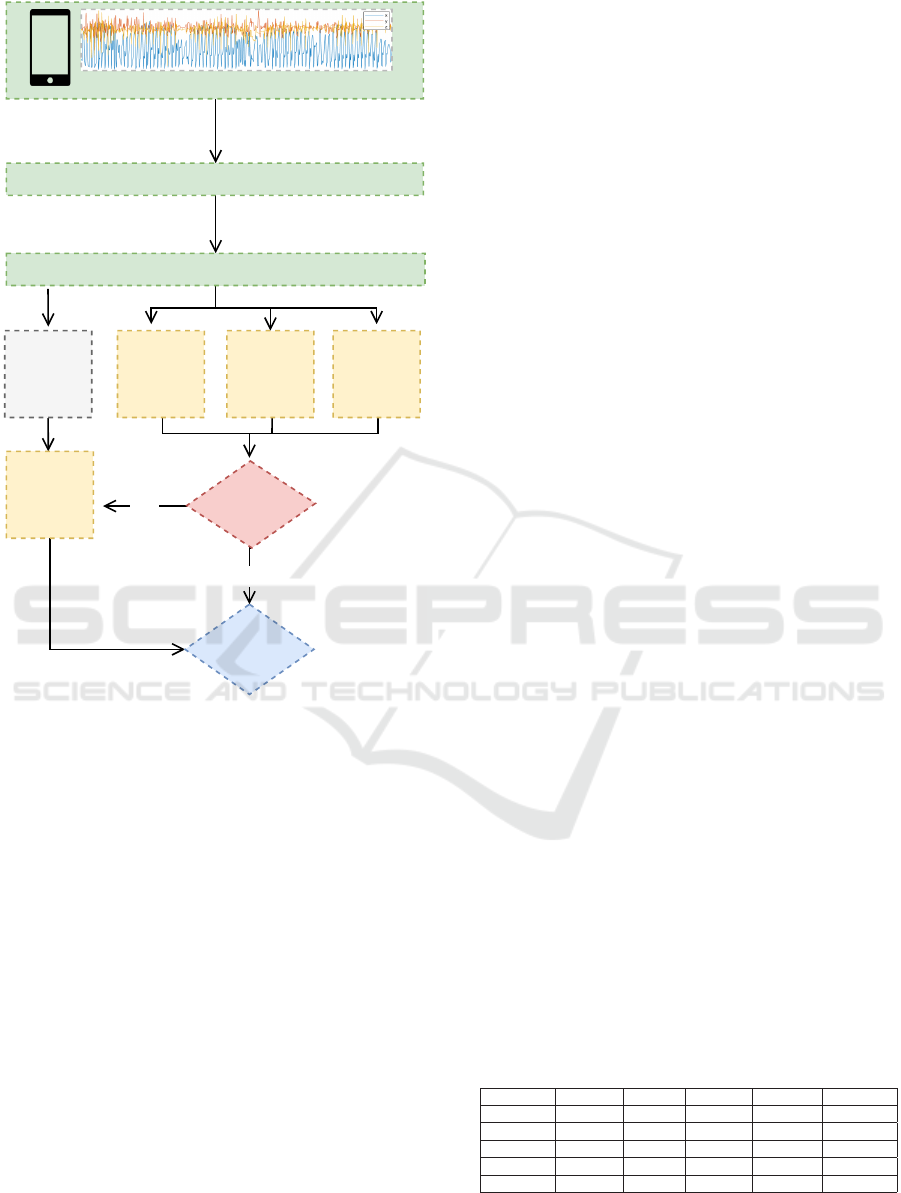
Moving Average Filter
Raw Accelerometer Data
3-Second Windows
Time
Series
Forest
Fast
Shapelets
Bag-of-
SFA-
Symbols
Decision
Tree
No
Yes
Distinct
Classes?
Select
Majority
Class
Time
Domain
Features
Figure 1: Architecture of the the proposed system.
Linear Fourier. Because our system is designed to
run on portable devices with limited computational
resources, we chose Moving Average Filter method
(Lorenz, ) as our smoothing method.
5.3 Signal Segmentation
Soccer practice sessions typically last between several
minutes to one hour or more. As a result, dividing the
incoming data into segments/windows is necessary to
extract the important features. We conducted several
preliminary experiments to find the best window size
for this purpose. We found a 3-second window is the
optimal size for our system to capture the characteris-
tics of each soccer move without negatively affecting
the accuracy.
5.4 Classification
Our goal is to examine 3 feature-based algorithms
that use different approaches. We explored Time
series forest (TSF) from the Intervals family, Fast
Shapelets (FS) from the Shapelets family, and Bag-
of-SFA-Symbols (BOSS) from the Dictionary family.
The resulting segments from the signal segmentation
step were then used to train the 3 classifiers. After
tuning each algorithm to find the best parameters, we
proposed a novel approach to combine the aforemen-
tioned algorithms in voting mechanism to improve the
accuracy and reduce the training time. The main goals
of this step are to enhance the classification accuracy
and reduce the over-fitting probability. Our collabo-
rative model is independent, which allows for paral-
lel training. We also added a light-weight classifier,
which will act as a tie breaker (e.g. when each clas-
sifier produces a distinct class). Decision Tree was
chosen as the tie breaker classifier due to its speed and
efficiency. To train the fourth classifier, we extracted
10 time domain features from the x and y axes.
6 EMPIRICAL EVALUATION
In all experiments, we used the open-source code
from the Time Series Classification repository (Bag-
nall et al., 2017).
All of the experiments were done using a single
machine with a dual-core processor (4 logical proces-
sors) and 8 Gigabytes memory. To evaluate the clas-
sification performance, we used 10-fold cross valida-
tion.
6.1 Time Series Forest (TSF)
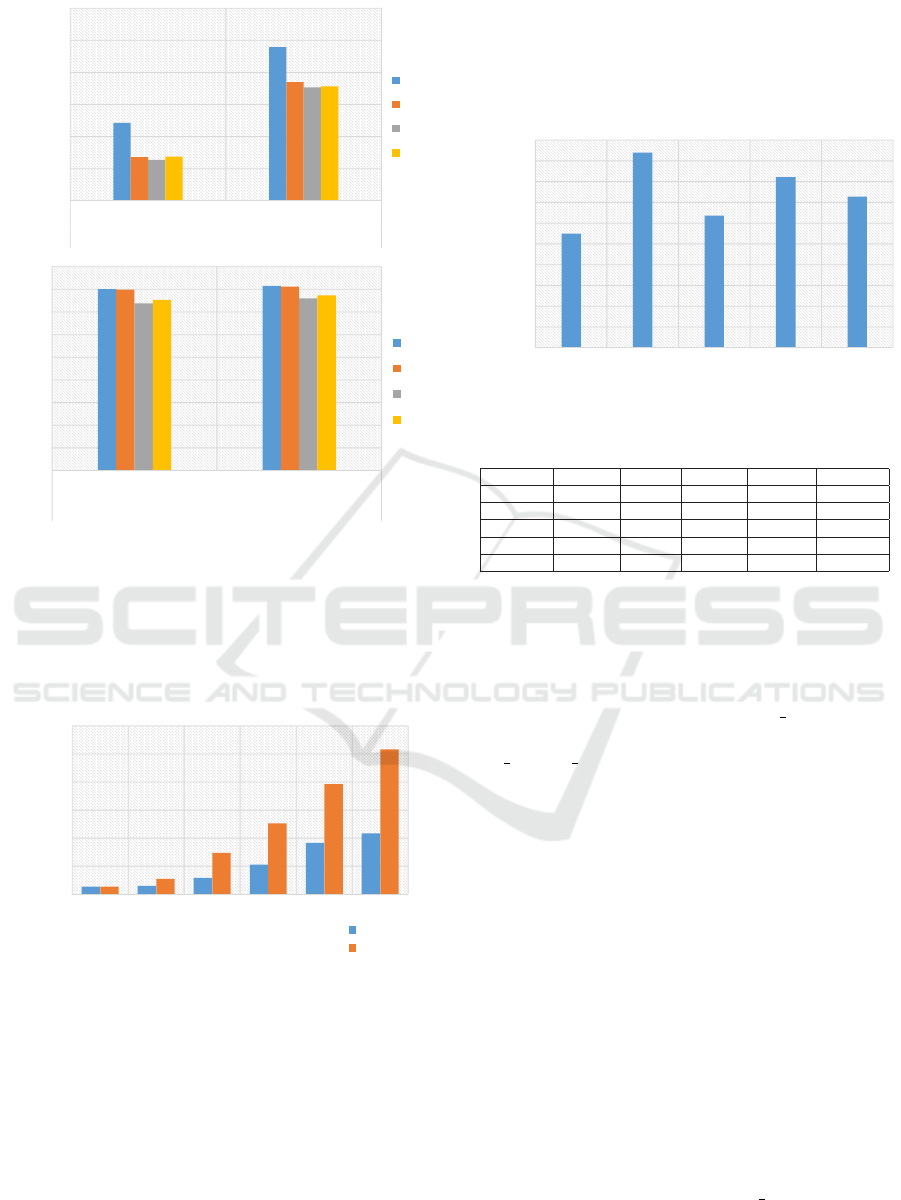
In our preliminary experiment, we used 500 trees and
30 candidates. The accuracy of our system was is
81%. Figure 2 shows accuracy per activity. It can be
clearly seen that shooting and passing have the high-
est accuracy compared to the rest. On the other hand,
heading has the lowest accuracy. We believe the rea-
son for these results is the nature of these activities.
Passing and shooting have distinct natures. When a
player passes the ball, the power applied on the ball is
considerably less than shooting the ball, which makes
body movements in passing less intense than shoot-
ing. Table 1 illustrates the confusion matrix.
Table 1: Confusion matrix of TSF.
body movements in passing less intense than shoot-
ing. Table 1 illustrates the confusion matrix.
Figure 2: TSF Accuracy per activity
Table 1: Confusion matrix of TSF
Running Passing Heading Shooting Dribbling
Running 0.80 0.04 0.06 0.00 0.10
Passing 0.00 0.88 0.02 0.10 0.00
Heading 0.08 0.17 0.70 0.06 0.00
Shooting 0.00 0.08 0.02 0.91 0.00
Dribbling 0.16 0.00 0.09 0.02 0.73
6.1.1 Parameters Effect
TSF has two parameters to be entered by the user:
number of trees and number of candidate thresh-
olds. In this experiment, we attempted to find the
best parameters combination to achieve best accuracy
while lowering training time using a greedy approach
(Frank Hutter, )(Matuszyk et al., ). We started with
a varying number of trees while keeping the number
of candidates fixed to 30. The forests’ sizes were
50, 100, 250, 500(De f ault), 1000. The results show
that the execution time increases as the number of
trees increases, while the improvement in accuracy is
less than 1% which is insignificant. Figure 3 shows
the detailed performance.
Figure 3: TSF performance with different number of trees
After testing the impact of the number of trees, we
evaluated the effect of the number of candidate thresh-
olds by fixing the number of trees to 100 and 250,
as these numbers showed the highest accuracy while
carrying less training time. The tested number of can-
didate thresholds were 1, 3, 5, 10, 20(De f ault), 30, 50.
The results in Figure 4 show that increasing the num-
ber of candidates from 1 to 30 increases the accuracy
by ∼4%, from 77% to 81% in the case of 100 trees,
with a minimal rise in the execution time by ∼500 ms.
However, there was is no difference in accuracy when
the forest size is 250. Figure 4 shows the performance
of our experiments.
6.1.2 Accelerometer Axis Elimination Effect
One of our primary goals in this paper is to increase
the efficiency of our system while maintaining the
same level of accuracy. For this step, we tested re-
moving one axis at a time from the accelerometer data
HEALTHINF 2020 - 13th International Conference on Health Informatics
38

0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
Running Passing Heading Shooting Dribbling
Accuracy
Figure 2: TSF Accuracy per activity.
6.1.1 Parameters Effect
TSF has two parameters to be entered by the user:
number of trees and number of candidate thresh-
olds. In this experiment, we attempted to find the
best parameters combination to achieve best accuracy
while lowering training time using a greedy approach
(Frank Hutter, )(Matuszyk et al., ). We started with
a varying number of trees while keeping the number
of candidates fixed to 30. The forests’ sizes were
50,100,250,500(De f ault),1000. The results show
that the execution time increases as the number of
trees increases, while the improvement in accuracy is
less than 1% which is insignificant. Figure 3 shows
the detailed performance.
0
5000
10000
15000
20000
25000
30000
35000
40000
0.6
0.65
0.7
0.75
0.8
0.85
25 50 100 250 500 1000
Training time/fold in ms
Accuracy
Number of trees
Accuracy
Training Time
Figure 3: TSF performance with different number of trees.
After testing the impact of the number of trees, we
evaluated the effect of the number of candidate thresh-
olds by fixing the number of trees to 100 and 250,
as these numbers showed the highest accuracy while
carrying less training time. The tested number of can-
didate thresholds were 1,3,5,10,20(De f ault),30,50.
The results in Figure 4 show that increasing the num-
ber of candidates from 1 to 30 increases the accuracy
by ∼4%, from 77% to 81% in the case of 100 trees,
with a minimal rise in the execution time by ∼500 ms.
However, there was is no difference in accuracy when
the forest size is 250. Figure 4 shows the performance
of our experiments.
0
1000
2000
3000
4000
5000
6000
7000
8000
100 250
Training time/fold in ms
Number of trees
1
3
5
10
20
30
50
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
100 250
Accuracy
Number of trees
1
3
5
10
20
30
50
Figure 4: TSF performance with different number of candi-
date thresholds.
6.1.2 Accelerometer Axis Elimination Effect
One of our primary goals in this paper is to increase
the efficiency of our system while maintaining the
same level of accuracy. For this step, we tested re-
moving one axis at a time from the accelerometer data
in the forests with 100 and 250 trees while candidate
thresholds were set to 30. In our first trial, the forest
size at 100 has an accuracy of 81% with all axes. Af-
ter eliminating the z axis, the accuracy decreases by
only 1%, while the training time drops by 45% from
∼4800 to ∼2700 ms. When we remove the x and y
axes, the accuracy sharply decreases to 75% and 73%,
respectively.
In our second trial, the forest size was 250. Remov-
ing the z axis does not affect the accuracy, while the
training time reduces by 23%, which is a significant
improvement toward an efficient recognition system.
However, using y,z and x,z axes affects the perfor-
mance negatively by 4% and 5%, respectively. Figure
5 shows the performance of our experiments.
6.1.3 Parallel Training Effect
Constructing and training a large forest sequentially
is not the optimal approach. Therefore, in this ex-
periment, we converted the TSF implementation into
a parallel approach in order to utilize the computation
resources. When forest size is small (i.e. 50 trees), the
A Feature-based Approach for Identifying Soccer Moves using an Accelerometer Sensor
39
0
2000
4000
6000
8000
10000
12000
100 250
no
Training time/fold in ms
Number of trees
all
x,y
x,z
y,z
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
100 250
no
Accuracy
Number of trees
all
x,y
x,z
y,z
Figure 5: TSF Accuracy and training time based on the used
axes.
training time is similar between the two approaches.
An improvement of 60% is achieved when the forest
size is larger than 250 trees. Figure 6 shows the per-
formance of our experiments.
0
5000
10000
15000
20000
25000
30000
50 100 250 500 750 1000
Training time/fold in ms
Number of Trees
Parallel
Sequential
Figure 6: TSF performance with parallel training.
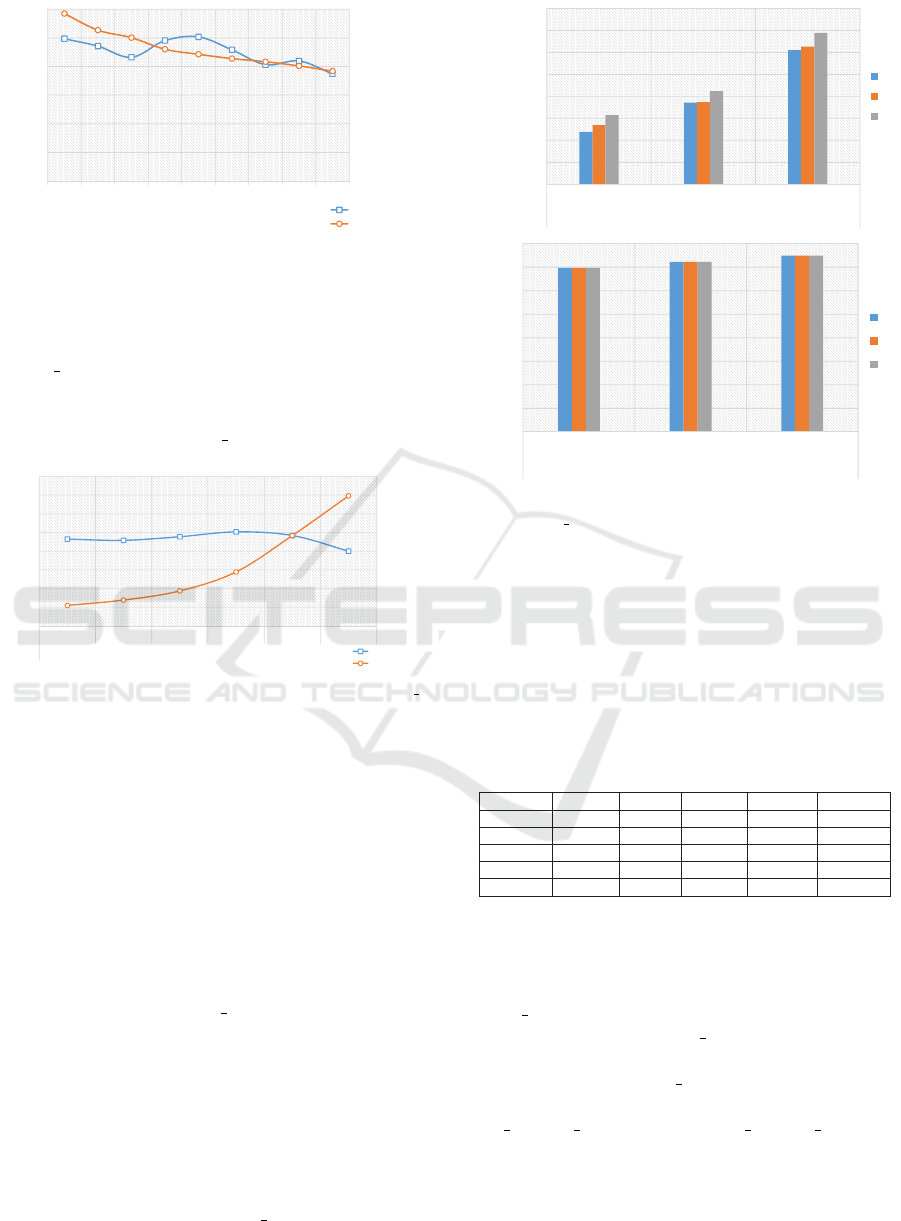
6.2 Fast Shapelets
In our exploratory experiments, we used the default
parameters as shown in the next paragraph. The ac-
curacy is 74%, but the training time is substantially
longer (i.e. 110 mins/fold) compared to TSF. It is
worth mentioning that our data is relatively small
compared to other datasets, meaning that training
time will increase dramatically with larger datasets.
The reason behind this slowness is FS does an in-
tensive search to construct Shapelet from all possi-
ble lengths. In the next section, we discuss the effect
of reducing the possible Shapelet lengths. Figure 7
shows accuracy per activity, and Table 2 shows the
confusion matrix.
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0.800
0.900
1.000
Running Passing Heading Shooting Dribbling
Accuracy
Figure 7: FS Accuracy per activity.
Table 2: Confusion matrix of FS.
Figure 5: TSF Accuracy and training time based on the used
axes
training time is similar between the two approaches.
An improvement of 60% is achieved when the forest
size is larger than 250 trees. Figure 6 shows the per-
formance of our experiments.
Figure 6: TSF performance with parallel training
6.2 Fast Shapelets
In our exploratory experiments, we used the default
parameters as shown in the next paragraph. The ac-
curacy is 74%, but the training time is substantially
longer (i.e. 110 mins/fold) compared to TSF. It is
worth mentioning that our data is relatively small
compared to other datasets, meaning that training
time will increase dramatically with larger datasets.
The reason behind this slowness is FS does an in-
tensive search to construct Shapelet from all possi-
ble lengths. In the next section, we discuss the effect
of reducing the possible Shapelet lengths. Figure 7
shows accuracy per activity, and Table 2 shows the
confusion matrix.
Figure 7: FS Accuracy per activity
Table 2: Confusion matrix of FS
Running Passing Heading Shooting Dribbling
Running 0.55 0.00 0.10 0.00 0.35
Passing 0.00 0.94 0.03 0.02 0.02
Heading 0.06 0.09 0.64 0.21 0.00
Shooting 0.02 0.04 0.10 0.82 0.02
Dribbling 0.25 0.00 0.00 0.02 0.73
6.2.1 Parameters Effect
Fast Shapelet has many default parameters that can
be modified: r = 10, which is the number of itera-
tions to perform random masking, top
k = 10, which
is the top k
th
subsequences that have the highest score,
min haplet len = 10, which is the minimum length of
any Shapelet, and step = 1, which is the increment in
the Shapelet discovery search.
Our initial experiments showed that step parameter is
the most influential factor on training time. As a re-
sult, we started by testing 10 various values for step
in the interval of [1, 500] while the other parameters
were left unchanged. Our experiments showed that
the accuracy is not drastically affected by increasing
the step in most cases, while the improvement in the
training time is exponential. For example, when we
increased the step from 1 to 5, the accuracy was low-
ered by only 1%, while the training time was reduced
by ∼80%. When step = 30 or 50, the accuracy is
74% and 75%, respectively, while the time is reduced
by one order of magnitude. Figure 8 shows the impact
of step size on the accuracy and training time.
Next, we set the value of step to 50, since
this value showed the best performance. We
6.2.1 Parameters Effect
Fast Shapelet has many default parameters that can
be modified: r = 10, which is the number of itera-
tions to perform random masking, top k = 10, which
is the top k
th
subsequences that have the highest score,
min shaplet len = 10, which is the minimum length
of any Shapelet, and step = 1, which is the increment
in the Shapelet discovery search.
Our initial experiments showed that step parameter is
the most influential factor on training time. As a re-
sult, we started by testing 10 various values for step
in the interval of [1,500] while the other parameters
were left unchanged. Our experiments showed that
the accuracy is not drastically affected by increasing
the step in most cases, while the improvement in the
training time is exponential. For example, when we
increased the step from 1 to 5, the accuracy was low-
ered by only 1%, while the training time was reduced
by ∼80%. When step = 30 or 50, the accuracy is
74% and 75%, respectively, while the time is reduced
by one order of magnitude. Figure 8 shows the impact
of step size on the accuracy and training time.
Next, we set the value of step to 50, since
this value showed the best performance. We
then tested 6 values for top k which were
{1,3,5,10(De f ault),20,30}. Our results show
that the default value, 10, is the highest value in
HEALTHINF 2020 - 13th International Conference on Health Informatics
40
1
10
100
1000
10000
100000
1000000
10000000
0.5
0.55
0.6
0.65
0.7
0.75
0.8
1 5 10 30 50 75 100 150 225
Training Time/fold in ms (log scale)
Accuracy
Step
Accuracy
Training Time
Figure 8: FS Accuracy and training time based on step size.
accuracy. Increasing the values to 20 or 30 affect
the accuracy and training time negatively in both
step values. On the other hand, reducing the value
of top k to 3 reduced the training time by 50% with
only a 2% accuracy loss, which is suitable for limited
computational resources. Figure 9 illustrates our
results in regards to the top k values.
0
50000
100000
150000
200000
250000
300000
350000
400000
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
1 3 5 10 20 30
50
Training Time/fold in ms
Accuracy
top_k
Accuracy
Training Time
Figure 9: FS Accuracy based on step size (50) and top k
values.
Random Projection iteration r is another parame-
ter that we can modify. We tested 3 values for r, which
were {5, 10(De f ault),20}. Our results show that r
does not affect the accuracy, but when r increased,
the training time also increases by 10%. Figure 10
illustrates the results of this experiment.
6.2.2 Accelerometer Axis Elimination Effect
In this section, we examined the impact of an axis
elimination while fixing the parameters as follows:
step = 50, r = 5, and top k = 3,5,10. When only
x,y is used, the accuracy drops by 3%, from 73% to
70%, with a 66% reduction in the training time. In
the case of using x,z and y,z, the accuracy drops by
10% and 30%, respectively. These results confirmed
what we found in the TSF experiment about the im-
portance of the x axis in the recognition task. Using
only two axes, x,y, can lead to an acceptable accuracy
in order to shorten the training time. Figure 11 shows
the results of using different top k values.
0
20000
40000
60000
80000
100000
120000
140000
160000
3 5 10
50
Training Time/fold in ms
top_k
5
10
20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
3 5 10
50
Accuracy
top_k
5
10
20
Figure 10: FS Accuracy and training time based on step size
(50) and top k values (3,5,10) with different r values.
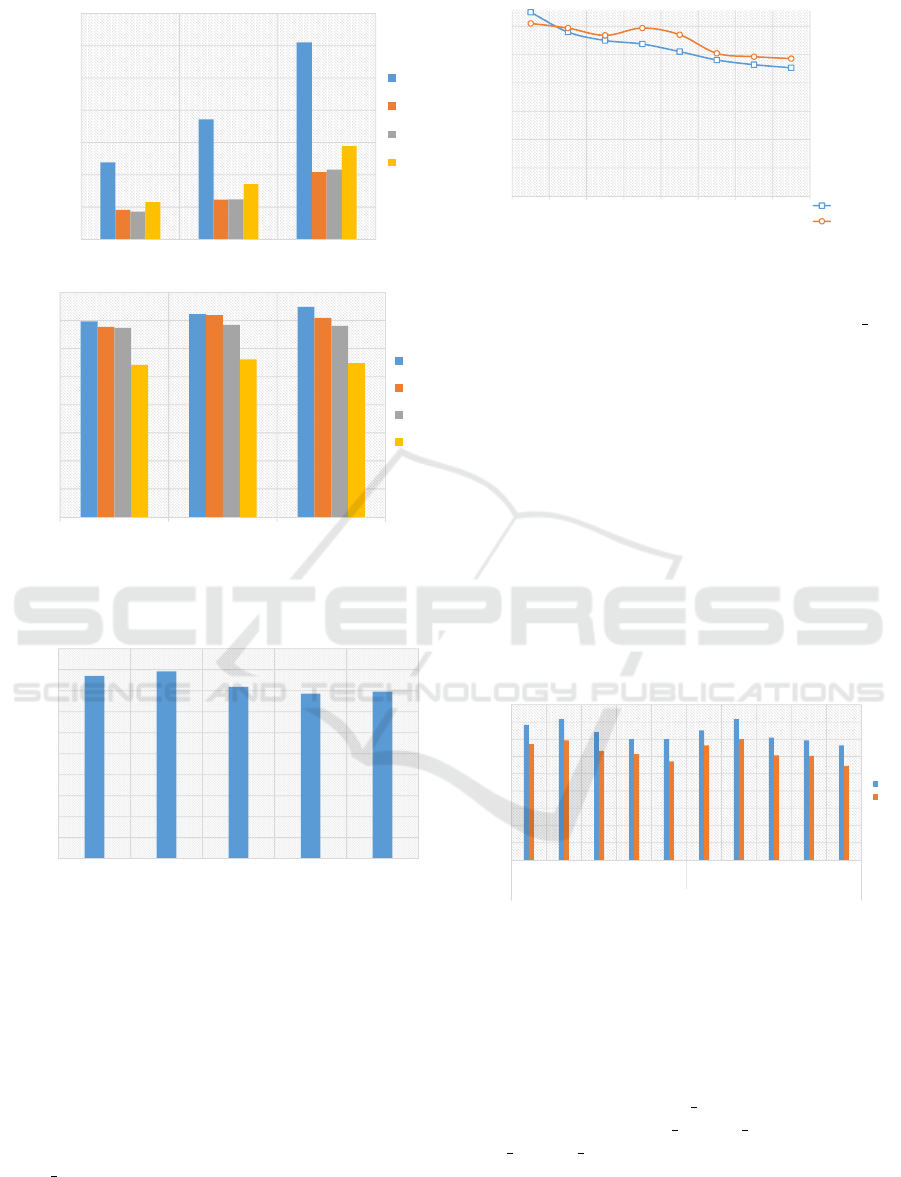
6.3 Bag-of-SFA-Symbols
In our first BOSS experiment, we used the default pa-
rameters to train our model. The accuracy is 82%,
which is similar to TSF, however, the training time is
considerably longer than TSF (i.e. 52 mins/fold). Fig-
ure 12 shows accuracy per activity, and Table 3 shows
the confusion matrix.
Table 3: Confusion matrix of BOSS.
Figure 8: FS Accuracy and training time based on step size
then tested 6 values for top
k which were
{1, 3, 5, 10(De f ault), 20, 30}. Our results show
that the default value, 10, is the highest value in
accuracy. Increasing the values to 20 or 30 affect
the accuracy and training time negatively in both
step values. On the other hand, reducing the value
of top k to 3 reduced the training time by 50% with
only a 2% accuracy loss, which is suitable for limited
computational resources. Figure 9 illustrates our
results in regards to the top k values.
Figure 9: FS Accuracy based on step size (50) and top k
values
Random Projection iteration r is another parame-
ter that we can modify. We tested 3 values for r, which
were {5, 10(De f ault), 20}. Our results show that r
does not affect the accuracy, but when r increased,
the training time also increases by 10%. Figure 10
illustrates the results of this experiment.
6.2.2 Accelerometer Axis Elimination Effect
In this section, we examined the impact of an axis
elimination while fixing the parameters as follows:
step = 50, r = 5, and top
k = 3, 5, 10. When only
x, y is used, the accuracy drops by 3%, from 73% to
70%, with a 66% reduction in the training time. In
the case of using x, z and y, z, the accuracy drops by
10% and 30%, respectively. These results confirmed
what we found in the TSF experiment about the im-
portance of the x axis in the recognition task. Using
only two axes, x, y, can lead to an acceptable accuracy
Figure 10: FS Accuracy and training time based on step size
(50) and top
k values (3,5,10) with different r values
in order to shorten the training time. Figure 11 shows
the results of using different top
k values.
6.3 Bag-of-SFA-Symbols
In our first BOSS experiment, we used the default pa-
rameters to train our model. The accuracy is 82%,
which is similar to TSF, however, the training time is
considerably longer than TSF (i.e. 52 mins/fold). Fig-
ure 12 shows accuracy per activity, and Table 3 shows
the confusion matrix.
Table 3: Confusion matrix of BOSS
Running Passing Heading Shooting Dribbling
Running 0.87 0.00 0.00 0.04 0.09
Passing 0.00 0.89 0.03 0.08 0.00
Heading 0.00 0.17 0.82 0.02 0.00
Shooting 0.00 0.12 0.08 0.79 0.01
Dribbling 0.14 0.00 0.07 0.00 0.80
6.3.1 Parameters Effect
BOSS has few parameters that can be modified.
al pha
size = 4 refers to the number of letters in the
string representation. mean norm is a boolean vari-
able to determine whether to perform mean normal-
ization or not. window
length is a dynamic vari-
able that can be affected by 3 different parameters:
min
window length = 10, max window length =
6.3.1 Parameters Effect
BOSS has few parameters that can be modified.
al pha size = 4 refers to the number of letters in the
string representation. mean norm is a boolean vari-
able to determine whether to perform mean normal-
ization or not. window length is a dynamic vari-
able that can be affected by 3 different parameters:
min window length = 10, max window length =
T S.length, and step = 1, which is the increase in
the window’s size. The default parameters will con-
duct SFA transforming to all possible window sizes
1,2,3,...,T S.length, which is an expensive computa-
tion. In this experiment, we used different step values
A Feature-based Approach for Identifying Soccer Moves using an Accelerometer Sensor
41
0
20000
40000
60000
80000
100000
120000
140000
3 5 10
Training Time/fold in ms
top_k
All
X,Y
X,Z
Y,Z
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
3 5 10
Accuracy
top_k
All
X,Y
X,Z
Y,Z
Figure 11: FS Accuracy and training time based on the used
axes.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
Running Passing Heading Shooting Dribbling
Accuracy
Figure 12: BOSS Accuracy per activity.
to measure the classification performance in terms of
accuracy and training time. Our results show that in-
creasing the step value to 15 does not affect the accu-
racy by more than 2%, however it reduces the training
time by one order of magnitude (i.e. from 52 mins to 4
mins/fold). From Figure 13, we can conclude that any
step 6 25 can achieve an acceptable accuracy, while
significantly reducing the training time.
The next experiment examined the effect of
al pha size. We tested the following values
3,4(De f ault),6,8,10 when step = 5 and step = 15.
Our experiments show that 4 is the best alphabet size
and increasing the alphabet size leads to a sharp de-
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1 5 10 15 25 50 75 100
1
10
100
1000
10000
100000
1000000
Accuracy
Step
Training Time/fold in ms
(log scale)
Trainig Time
Accuracy
Figure 13: BOSS training time and accuracy based on step
size.
crease in accuracy. When we increase the al pha size
from 4 to 6, the accuracy drops by 7% when step = 5,
and by 11% when step = 15. These results are con-
sistent with the findings in (Lin et al., 2012) (Sch
¨
afer,
2015), which suggest 4 is an appropriate alphabet
size.
Our last experiment in parameter tuning was the
mean normalization effect. For every SFA word, the
first Fourier coefficient was not included. Our results
show that the normalization crucially lowered the ac-
curacy by more than 11%. Our interpretation for this
result is that soccer movements are fast and have high
amplitude, and the normalization reduces the signal
amplitude which leads to confusion in the classifica-
tion process. Figure 14 summarizes the results of the
last two experiments.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
3 4 6 8 10 3 4 6 8 10
5 15
Accuracy
Alphapets size
step size
NO
YES
Figure 14: BOSS Accuracy based on the alphabet size (3,
4, 6, 8, 10) and mean normalization (yes,no).
6.3.2 Accelerometer Axis Elimination Effect
In this experiment, we tested the effect of elimi-
nating one of the three axes. We used the fol-
lowing attributes: al pha size = 4, mean
n
orm =
f alse, step = 15, min window length = 10, and
max window length = T S.length. Our results show
that eliminating the z axis causes a decrease of 3%,
from 82% to 79%, while reducing the training time by
more than 50%. Eliminating the y and x axes reduces
the accuracy by 8% and 11%, respectively. These re-
HEALTHINF 2020 - 13th International Conference on Health Informatics
42

sults align with the outcomes of TSF and FS exper-
iments, which reveals the importance of x,y axes in
the classification process, compared with the z axis,
which can be omitted without crucially affecting the
accuracy. Figure 15 shows the accuracy and training
time of the axis elimination experiment.
0
100000
200000
300000
400000
500000
600000
700000
5 15
Training time/fold in ms
Step
all
x,y
x,z
y,z
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
5 15
Training time/fold in ms
Step
all
x,y
x,z
y,z
Figure 15: BOSS accuracy and training time based on the
used axes.
6.4 Collaborative Feature-based
Approach
Our collaborative model achieves better accuracy by
2% with less training overhead, because we selected
the best possible parameters for these models. Fig-
ure 16 shows the accuracy of the collaborative model
compared to TSF, FS, and BOSS classifiers.
70
72
74
76
78
80
82
84
86
Accuracy
TSF FS BOSS Proposed System
Figure 16: Collaborative Approach compared to single
models.
7 CONCLUSION
In this paper, we aimed to recognize soccer
moves in real-time. We comprehensively ex-
amined three different feature-based approaches,
which are Time Series Forest (interval-based),
Fast Shapelets (Shapelet-based), and Bag-of-SFA-
Symbols (Dictionary-based). We studied different
factors that might affect the accuracy and the train-
ing time, such as parameters tuning and axis elimi-
nation. We tuned our model to reduce the training
time by one order of magnitude, in the case of Fast
Shapelets and Bag-of-SFA-Symbols, without sacrific-
ing the accuracy. We then proposed a collaborative
model where we combined all three approaches in a
voting mechanism using only two axes, which led to
an increase in accuracy by 2% to reach 84%.
REFERENCES
Anguita, D., Ghio, A., Oneto, L., Parra, X., and Reyes-
Ortiz, J. L. (2012). Human activity recognition
on smartphones using a multiclass hardware-friendly
support vector machine. In International workshop on
ambient assisted living, pages 216–223. Springer.
Bagnall, A., Lines, J., Bostrom, A., Large, J., and Keogh,
E. (2017). The great time series classification bake
off: a review and experimental evaluation of recent
algorithmic advances. Data Mining and Knowledge
Discovery, 31(3):606–660.
Bayat, A., Pomplun, M., and Tran, D. A. (2014). A study
on human activity recognition using accelerometer
data from smartphones. Procedia Computer Science,
34:450–457.
Baydogan, M. G., Runger, G., and Tuv, E. (2013). A bag-
of-features framework to classify time series. IEEE
transactions on pattern analysis and machine intelli-
gence, 35(11):2796–2802.
Campbell, S. D. and Diebold, F. X. (2005). Weather fore-
casting for weather derivatives. Journal of the Ameri-
can Statistical Association, 100(469):6–16.
De Gooijer, J. G. and Hyndman, R. J. (2006). 25 years of
time series forecasting. International journal of fore-
casting, 22(3):443–473.
Deng, H., Runger, G., Tuv, E., and Vladimir, M. (2013). A
time series forest for classification and feature extrac-
tion. Information Sciences, 239:142–153.
Dunning, E. (2013). Sport matters: Sociological studies of
sport, violence and civilisation. Routledge.
Frank Hutter, M. L. Algorithm configuration:
Hands-on tutorial. http://www.ml4aad.org/wp-
content/uploads/2016/02/AC-Tutorial.pdf.
Ghazvininejad, M., Rabiee, H. R., Pourdamghani, N., and
Khanipour, P. (2011). Hmm based semi-supervised
learning for activity recognition. In Proceedings of
the 2011 international workshop on Situation activity
& goal awareness, pages 95–100. ACM.
A Feature-based Approach for Identifying Soccer Moves using an Accelerometer Sensor
43

Guan, D., Yuan, W., Lee, Y.-K., Gavrilov, A., and Lee, S.
(2007). In Embedded and Real-Time Computing Sys-
tems and Applications, 2007. RTCSA 2007. 13th IEEE
International Conference on, pages 469–475. IEEE.
Hochheiser, H. and Shneiderman, B. (2004). Dynamic
query tools for time series data sets: timebox widgets
for interactive exploration. Information Visualization,
3(1):1–18.
INNOVENTIONS
R
, I. ((accessed February 3, 2017)). Sen-
sor Kinetics Pro.
Jeong, Y.-S., Jeong, M. K., and Omitaomu, O. A. (2011).
Weighted dynamic time warping for time series clas-
sification. Pattern Recognition, 44(9):2231–2240.
Kurbalija, V., Radovanovi
´
c, M., Ivanovi
´
c, M., Schmidt, D.,
von Trzebiatowski, G. L., Burkhard, H.-D., and Hin-
richs, C. (2014). Time-series analysis in the medical
domain: A study of tacrolimus administration and in-
fluence on kidney graft function. Computers in biol-
ogy and medicine, 50:19–31.
Kwapisz, J. R., Weiss, G. M., and Moore, S. A. (2011).
Activity recognition using cell phone accelerometers.
ACM SigKDD Explorations Newsletter, 12(2):74–82.
Lara, O. D., Labrador, M. A., et al. (2013). A survey
on human activity recognition using wearable sen-
sors. IEEE Communications Surveys and Tutorials,
15(3):1192–1209.
Lee, S.-M., Yoon, S. M., and Cho, H. (2017). Human activ-
ity recognition from accelerometer data using convo-
lutional neural network. In Big Data and Smart Com-
puting (BigComp), 2017 IEEE International Confer-
ence on, pages 131–134. IEEE.
Liao, T. W. (2005). Clustering of time series data—a survey.
Pattern recognition, 38(11):1857–1874.
Lin, J., Khade, R., and Li, Y. (2012). Rotation-invariant
similarity in time series using bag-of-patterns repre-
sentation. Journal of Intelligent Information Systems,
39(2):287–315.
Lorenz, D. A comparison of denoising methods for one
dimensional time series.
Marteau, P.-F. (2009). Time warp edit distance with stiff-
ness adjustment for time series matching. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
31(2):306–318.
Matuszyk, P., Castillo, R. T., Kottke, D., and Spiliopoulou,
M. A comparative study on hyperparameter optimiza-
tion for recommender systems.
Radu, V., Katsikouli, P., Sarkar, R., and Marina, M. K.
(2014). A semi-supervised learning approach for ro-
bust indoor-outdoor detection with smartphones. In
Proceedings of the 12th ACM Conference on Embed-
ded Network Sensor Systems, pages 280–294. ACM.
Rakthanmanon, T. and Keogh, E. (2013). Fast shapelets:
A scalable algorithm for discovering time series
shapelets. In proceedings of the 2013 SIAM Interna-
tional Conference on Data Mining, pages 668–676.
SIAM.
Ratanamahatana, C. A. and Keogh, E. (2004). Everything
you know about dynamic time warping is wrong. Cite-
seer.
Sch
¨
afer, P. (2015). The boss is concerned with time series
classification in the presence of noise. Data Mining
and Knowledge Discovery, 29(6):1505–1530.
Tapinos, A. (2013). Time Series Data Mining In Systems
Biology. PhD thesis, The University of Manchester
(United Kingdom).
Wan, J., O’grady, M. J., and O’hare, G. M. (2015). Dy-
namic sensor event segmentation for real-time activ-
ity recognition in a smart home context. Personal and
Ubiquitous Computing, 19(2):287–301.
Xi, X., Keogh, E., Shelton, C., Wei, L., and Ratanama-
hatana, C. A. (2006). Fast time series classification us-
ing numerosity reduction. In Proceedings of the 23rd
international conference on Machine learning, pages
1033–1040. ACM.
Yazdansepas, D., Saroha, N., Ramaswamy, L., and
Rasheed, K. Towards efficient & real-time human ac-
tivity recognition using wearable sensors: A shapelet-
based pattern matching approach.
HEALTHINF 2020 - 13th International Conference on Health Informatics
44
