
Who Is Your Favourite Player?
Specific Player Tracking in Soccer Broadcast
Tatsuya Nakamura and Katsuto Nakajima
Department of Information Systems and Multimedia Design, Tokyo Denki University, Tokyo, Japan
Keywords: Player Tracking, Player Identification, Digit Recognition, One-Shot Learning.
Abstract: In this paper, we propose a method to identify and track only a specific player out of a number of players
wearing the same jersey in the video sequence of a soccer broadcast to make a summary video focusing on
the plays of the specific player. In a soccer broadcast, it is not easy to track a specific player because many
players on both teams come and go and move across the field. Therefore, we devised a method to overcome
this difficulty by combining multiple machine-learning techniques, such as deep neural networks. Our
evaluation was conducted for nine players in three different positions and wearing three different color jerseys,
and it is shown that although there is room for improvement on the recall, our proposed method can
successfully track specific players with a precision of over 90%.
1 INTRODUCTION
In order to make a summary video focusing on the
plays of a specific player from a soccer broadcast, it
is necessary to identify and track only a specific
player from a number of players wearing the same
jersey in the video. However, due to frequent scene
changes (shot changes) and some telops on the screen,
specific player tracking is very challenging.
There are three more reasons why it is difficult to
track a specific player in a soccer game. First, because
the playing field is very wide, the size of the players
appearing in the video is relatively small, making it
difficult to resolve the features effectively for the
identification and tracking. Second, the players are
often occluded by other players involved in the game.
Third, the color appearance of the players may change
dramatically due to direct sunlight and the shade of
the stadium. Additionally, the possible unsteady
motion of camera (“shaky camera”) in the broadcast
makes it even more difficult to track a specific player
because of excessive motion blur and the fact that the
target player is not always in the frame.
In this paper, we propose a method of combining
multiple machine-learning techniques such as deep
neural networks to achieve reliable identification and
tracking of the target player. Our evaluation shows
that, though there is a scope for improvement on the
recall, our proposed method is successful in tracking
a specific soccer player with a precision of over 90%
for nine players in three different positions and
wearing three different color jerseys.
2 RELATED WORKS
Although various methods of player tracking have
been proposed so far (Yang et al., 2017; Liu et al.,
2009), few methods identify and track only a specific
player. As a specific player in a soccer match must be
identified among the ten players who wear the same
jersey (except for the goalkeeper), only limited
information can be utilized to distinguish that player.
As in a video broadcast, it is common to use the
player’s face and jersey number for identification, as
these do not change during a match. However,
sufficiently large number of pixels are necessary to
recognize them easily. For this reason, many existing
methods did not work well in the field overview
scenes (Figure 1(a)) but was successful in the close-
up scenes (Figure 1(b)). In these scenes, the players
can be captured with enough pixels to identify the
player’s face and jersey number relatively easily. In
Ballan et al. (2007), face identification was executed
in the detected face region, and the label of the
corresponding player was assigned. However, in
close-up scenes, tracking is difficult due to the narrow
angle. On the other hand, face identification is almost
impossible in the field overview scenes because of
insufficient resolution. Therefore, there has been no
Nakamura, T. and Nakajima, K.
Who Is Your Favourite Player? Specific Player Tracking in Soccer Broadcast.
DOI: 10.5220/0008910807330740
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
733-740
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
733

established method yet to both identify and track a
specific player simultaneously.
(a) Overview scene (b) Close-up scene
Figure 1: Differences in scene.
As a player’s jersey number is uniquely assigned,
it is a stronger identifier than faces. Therefore, it is
widely used for player identification (e.g., Ye et al.,
2005; Saric et al., 2008). Recently, it has become
possible to recognize the jersey number in an
overview scene by applying one of the several
methods based on deep learning (Gerke et al., 2015;
Li et al., 2018).
For these above-mentioned reasons, we propose a
method to track a specific player by using (a) the
jersey number identification before starting to track,
(b) person detection for tracking, and (c) face re-
identification when missing to continue to track the
player.
3 PROPOSED METHOD
3.1 Process Flow
The overall process flow of the proposed method is
shown in Figure 2. First, one frame is acquired from
the input video, and the unnecessary region for player
tracking is deleted. After that, the specific player
tracking algorithm composed of the detection,
identification, tracking, and search processes are
followed. The successfully tracked frames are stored
for the summary video. The following sections
describe each process in detail.
Figure 2: Flowchart of the proposed method.
3.2 Pre-processing (Field Extraction)
In each video frame of the broadcast, regions such as
the spectator stands, which may become an obstacle
for player tracking, are excluded. As the color of the
soccer field must be green according to the IFAB law,
only the field is left and other regions are masked out
by a hue value from 80 to 160, which is regarded as
the green of a field. To remove the noise, this mask is
eroded and dilated before the masking procedure
(Figure 3).
3.3 Detection Process
3.3.1 Players Detection
We must know the precise location of the target
player in order to accurately identify and track them.
(a) Original image (b) Mask image (c) Field Extraction result
Figure 3: Procedure of field extraction.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
734

Therefore, we utilize a deep-learning-based object
detector, YOLOv3 (Redmon et al., 2018), to find the
location and size of the player. YOLOv3 with a model
trained by the COCO dataset has a good balance of
detection accuracy and speed. It can also detect very
small objects and output rectangles and show their
locations and sizes (Figure 4(a)). However, it may
occasionally output large rectangles as the result of a
false detection. Therefore, we exclude such a large
rectangle (having an area of 1/100 or more of the
input frame) because the players would appear
smaller than this on the field (Figure 4(b)).
(a) Before delete (b) After delete
Figure 4: Procedure of leaving only small detection
rectangles.
3.3.2 Team Discrimination
Out of the person detection rectangles, only the ones
that seem to correspond to the team to which the
specific player (target player) belongs (the target
team) are left as the objects to be tracked in the
subsequent process. This improves the tracking
accuracy. It is done based on the RGB value of the
team jersey registered beforehand (Figure 5). The
discrimination is made based on whether the number
of pixels in a certain range around the registered RGB
value of the jersey (± 6% this time) is equal to or
greater than a threshold in the person detection
rectangle. In order to cope with the fluctuation of the
jersey color observed in the video, the range of the
discrimination is dynamically shifted according to the
average brightness of the region corresponding to the
upper body, which is defined as the position slightly
above the center of the rectangle. More specifically,
the region from 67% to 50% of the height of the
Figure 5: Procedure of team discrimination.
player rectangle with a half width of the rectangle is
examined. This region is horizontally shifted by 10 %
of the rectangle to the attacking direction (Figure 6).
All of these parameters were determined according to
our preliminary experiments. This enables the
discrimination of the color of the player’s jersey even
if the player moves away from the area under the
sunshine to the shadow area of the field or vice versa.
We define the player rectangle in which the player is
determined as the target team.
Figure 6: Dynamically fluctuation of discriminant color.
3.4 Identification Process (Jersey
Number Recognition)
As we mentioned in Section 2, there are some deep-
learning-based methods that can recognize a jersey
number in an overview scene. However, at present, a
sufficiently large dataset for deep-learning-based
recognition of the jersey number is not publicly
available, and the preparation of the dataset requires
a large amount of labor. Therefore, in this work, we
employ a digit recognition model for the house
numbers, which was created by a public dataset of
house numbers. The dataset contains various
typefaces and appearances such as illumination, blur,
and distortion, and many of those digits resemble the
jersey numbers on the back of players.
3.4.1 Creation of Digit Recognition Model
The SVHM dataset (Netzer et al., 2011) is a collection
of house number images from the Google Street View,
and it was used to create their digit recognition model.
The SVHM dataset consists of a group of RGB
images of multiple digit fonts, including the
background. It contains a variety of digits with
different colors, shapes, and defects (scratches, chips,
etc.), many of which look similar to blurred jersey
numbers in a soccer broadcast. Figure 7 shows some
examples of the jersey number images, and the
recognition result of our tentative evaluation using the
model trained by SVHM.
Who Is Your Favourite Player? Specific Player Tracking in Soccer Broadcast
735

input
GT 4 18 10 22 12
output 4 18 10 22 23
Figure 7: Jersey number image and recognition result.
These results are sufficient for our purpose.
Various color digits with low illumination, low
resolution, and deformation can be recognized.
Though the jersey number with excessive inclination
and blurring causes a mis-recognition, it is possible to
reduce the risk of such a mis-recognition in the
specific player tracking by accepting only the result
with a high confidence for the registered jersey
number of the target player.
3.4.2 Application to Jersey Number
Recognition
In order to incorporate the created digit recognition
model into our identification process, it is necessary
to extract the jersey number region in the player
rectangle detected from every frame automatically. In
this extraction, we assume that the player stands
upright to some extent. In this assumption, we define
the jersey number region to extend from 75% of the
height of the player rectangle to 50% of the height of
the player rectangle. The width is one-third the width
of the player rectangle. This size in the rectangle was
also based on our preliminary study. In this work,
only one kind of jersey number is recognized, and the
identification is considered to be a success when the
confidence is over 0.85 (Figure 8).
Figure 8: Procedure of jersey number recognition.
3.5 Tracking Process
3.5.1 Forward Centroid Tracking Algorithm
The first frame in which the jersey number
identification succeeds is set as the base frame, and
the tracking process starts with that frame. The
procedure is described below.
Step 1: Find the centroid of the player rectangles
The centroid (center position) of the player
rectangle is calculated by the upper left and lower
right coordinates, and each centroid is assigned a
unique ID. A flag is also assigned only to the player
rectangle in which jersey number identification was
successful so that the player can be distinguished
from others.
Step 2: Associate the player rectangles between the
previous and current frames
As the player detection process is executed for
every frame, the centroid at each frame can be
calculated. If the frame rate is about 30 frames per
second, the distance players move between two
adjacent frames is very small. Therefore, the ID of the
closest centroid in the previous frame is handed over
to the centroid in the current frame if the distance
between those centroid locations is shorter than a
threshold (200 pixels in this implementation), which
is set at about two times the longest rectangle height.
During tracking, the number of players detected in
a frame may increase or decrease. The player
rectangle that cannot be associated with any rectangle
in the previous frame and has no ID, will be registered
as a new tracked player and assigned a new ID. On
the other hand, if some pre-assigned ID cannot be
associated with any others in the current frame, either
the ID recognition process has failed or the player
himself disappeared from the current frame. For this
ID, the centroid position is kept unchanged and the
number of absent frames is counted. If its counts
exceed a certain threshold (30 frames = 1 second in
this implementation), the ID is deleted from the list of
tracked players. If the ID is successfully associated,
its absent count is reset to zero. If the deleted ID is of
the target player, the tracking process ends, and the
search process starts.
3.5.2 Backward Centroid Tracking
Algorithm
It is often the case that the target player is not found
for a while after the camera shot is changed. On the
other hand, the player can often be found when his
jersey number is seen. As the purpose of this work is
to make a summary video offline, we decided to trace
back from the frame (the base frame) in which the
target player is identified. We call it the backward
tracking (Figure 9). As described above, tracking all
the player rectangles from the beginning of a shot
enables this backward tracking.
The backward tracking is carried out as follows.
While a specific player cannot be identified, all the
player rectangles acquired in the detection process are
stored in the computer memory (“memorized”) with
their IDs. Once the jersey number identification is
successful, the backward tracking is performed by the
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
736

same algorithm as in 3.5.1 using the memorized
player rectangles in the previous frames. When the
player rectangles run out or the target player is deleted
from the tracking player list during backward
tracking, the forward tracking starts from the base
frame in which jersey number identification
succeeded.
Figure 9: Bidirectional tracking image.
3.6 Searching Process
When the tracking of a specific player is interrupted
due to an occlusion with other players or telop on the
broadcast screen, or due to a frame out, it is very
difficult to search (re-identify) with manually
designed features because the players in an overview
scene have a very small number of pixels. Therefore,
we employ the features learned by a deep neural
network. For this purpose, it is necessary to collect
the training data for the player during the tracking and
to carry out the training in order to construct the
model that can re-identify any player in a variety of
appearances. There is a possibility of mis-training due
to false tracking. Therefore, we introduced a
mechanism for periodically initializing the training
data and re-learning model using the Siamese
Network (Bromley et al., 1993).
3.6.1 Siamese Network + One-Shot Learning
The Siamese Network is a deep metric learning
algorithm, in which two networks share weights and
each receive inputs such as vectors and images. It
learns the difference (distance) between two inputs.
For images, the Siamese Network learns whether the
class of two image pairs is the same or different. It is
not used here for the classification of input images,
and so it does not need a large amount of training data.
In an extreme case, one training data per class is
enough. For that reason, it is used for One-shot
learning and Few-shot learning (Koch et al., 2015).
In this work, we assume that the appearance of the
head and face (what we call “face” hereafter) does not
change much when the target player is framed in
again soon after (within 30 frames) he is framed out.
Therefore, the “face” image in the last frame just
before the failure to track is used as the training data
of One-shot learning for the Siamese Network.
3.6.2 Re-Identification by Siamese Network
The Siamese Network requires two networks that
share weights. For them, we employ the VGGFace2-
ResNet 50 (Cao et al., 2018) that was pre-trained by
VGG-Face2. It works as a “face” feature extractor,
and our Siamese Network calculates the similarity
between two “face” images.
Our preliminary experiment showed that it was
necessary to extract accurately the “face” region from
the player rectangle in order to carry out the re-
identification of the target player with a good
accuracy using the similarity computed by the
Siamese Network. As the “face” region in an
overview field scene is too small to recognize even by
a state-of-the-art object detector, we adopt a simple
way to extract the “face” region. Assuming that the
players are standing upright, we use an elliptical
binary mask (Figure 10 (a)) that approximates the
“face” region. By examining the player rectangles, we
decided that the elliptical mask is from the top to 86%
of the height of the rectangle and has a width of one-
fifth the width of the rectangle. It is applied to the
original image (Figure 10 (b)) to get the result (Figure
10 (c)), which is then used as an input image to the
Siamese Network.
(a) Mask (b) Original image (c) Result image
Figure 10: Face region extraction using a prepared mask.
The training of the Siamese Network was conducted
in a brute-force way. The “face” image of the specific
player (true data) and other players’ “face” images
(false data) were used for training. We chose a player
closest to the specific player as the false data. All
possible pairs
allowing the same data to be used for
both inputs are learned. The training was carried out
with a batch size of 1, 20 epochs, and Adam optimizer
according to (Kingma et al., 2015). These
hyperparameters were chosen for taking a balance
between the speed and the accuracy of our on-line
learning of the Siamese Network. We define the re-
identification to be successful when the similarity for
the pair of true data and false data is over 0.85, as a
threshold for strict re-identification. When the re-
identification is successful, the centroid of the player
rectangle is assigned with the ID of the specific player
and the tracking process resumes. After that, both the
weights of the Siamese Network model and the
training data are initialized.
Who Is Your Favourite Player? Specific Player Tracking in Soccer Broadcast
737
4 EVALUATION
4.1 Experiments
The proposed method was applied to the actual
broadcast videos and its performance was evaluated.
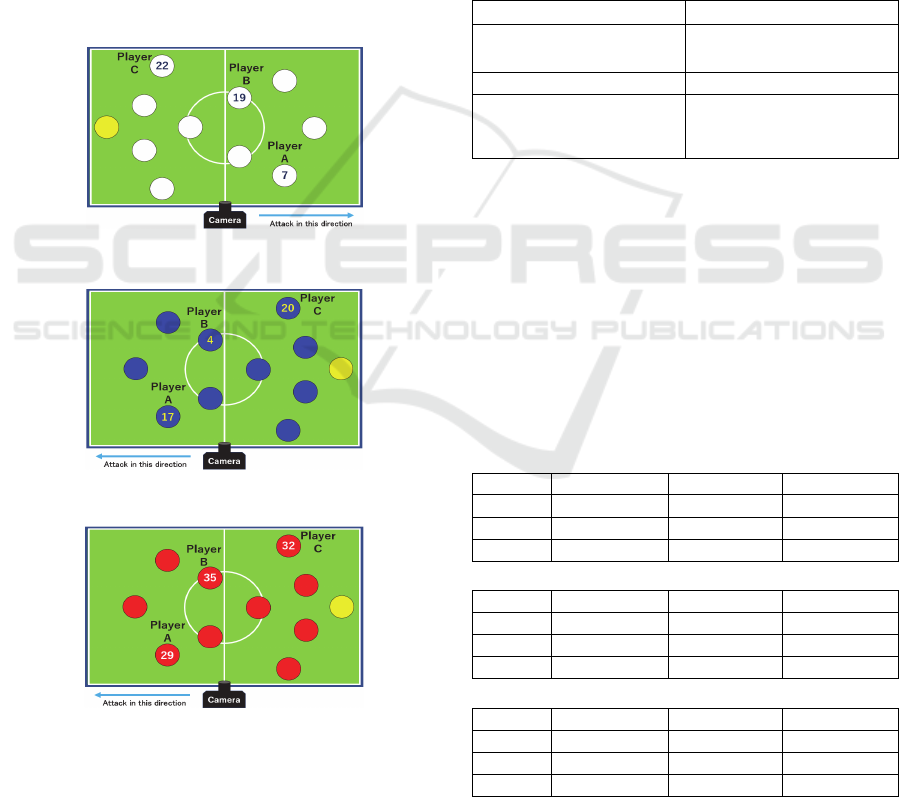
Figure 11 shows the positions and formations of the
teams of the selected players in the experiment. In this
evaluation, we chose nine players as the specific
player, three players each from three different teams
wearing different color jerseys. The three players in a
team are selected from different positions: forward
(player A), midfielder (player B), and defender
(player C).
All videos in our evaluation contain 10 minutes
from the start of the match and the resolution is 1280
× 720 pixels.
(a) Patten 1
Jersey color: white, Jersey number color: navy
(b) Patten 2
Jersey color: blue, Jersey number color: yellow
(c) Patten 3
Jersey color: red, Jersey number color: white
Figure 11: Players’ position and jersey number used for
evaluation. Yellow circles represent goalkeepers.
As there is no modification to the video, it includes
both close-up scenes and field overview scenes.
Therefore, we detected the shot switching using the
optical flow technique. When a shot is switched, a
specific player is left in an unidentified state, and all
the states for track and search are initialized. The
scenes except for the overview ones are excluded
from our tracking.
The proposed method is evaluated by the precision,
recall, and F-measure of the specific player
identification in the overview scene. The definition of
the categories for the evaluation index is shown in
Table 1.
Table 1: The definition of the categories for the evaluation
index.
True Positive (TP) False Positive (FP)
Identify a specific player
correctly
Identify a specific player
not correctly
False Negative (FN) True Negative (TN)
Not identified when a
specific player is in the
frame
Not identified when there
is no specific player in the
frame
4.2 Results and Discussion
4.2.1 Performance Comparison of Each
Player Position
Table 2 shows the results of three videos. For each
video, the precision, recall and F-measure are
compared across all three player positions (forward,
midfielder, and defender).
Table 2: Performance evaluation (%).
(a) Video 1
Player Precision Recall F-measure
A 93.6 37.7 53.8
B 94.3 44.1 60.1
C 96.2 19.4 32.3
(b) Video 2
Player Precision Recall F-measure
A 95.8 41.0 57.4
B 92.6 46.1 61.6
C 97.4 18.3 30.8
(c) Video 3
Player Precision Recall F-measure
A 97.6 54.8 70.2
B 97.8 60.2 74.5
C 97.9 13.7 24.0
As there were many shots in which no jersey
number identification was achieved at all in any
frame during the shot, the recall can not be high for
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
738

all players. Once a number identification was done,
the precision exceeds 90% for all players. Judging
from the F-measure, the mid-field player B had the
best tracking performance in all videos.
The reason for this is probably because player B
is often in a position where the jersey number can
often be identified, and the frame-out frequency is
moderate.
Forward player A is in the position where
offensive players almost always turn their back to the
camera in an overview field shot. Therefore, the
identification of the jersey number recognition was
highly successful. However, frame-outs of player A
occurred very frequently, which made it very difficult
to increase the recall performance. In order to
improve the re-identification process, we must study
the number and selection method of the training data
used for the Siamese Network. For example, the hair
style of the player is not included in the masked “face”
region. The elliptical mask is too simple to extract this
feature of the player. Effective feature extraction for
re-identification is an item left for future work.
For the defense player C, our result shows that
even if players look small in the video, it is possible
to recognize their jersey number correctly by our
method. However, because they are almost always
facing the camera in an overview scene, their jersey
numbers are rarely seen and difficult to identify, and
the recall becomes very low.
For all positions, in order to improve the recall
(correct tracking of the target player), we must
employ other information to find and track a specific
player. This can include the color of soccer cleats,
hair, etc. of the individual player. In addition, the
playing trajectory of players may also be helpful to
determine the “position” of the players, which would
be a strong cue to find the specific player. We leave
how to incorporate them to future work as well.
Even though the recall is not satisfactory as
mentioned above, our method is effective for the
tracking of a specific player because the precision of
all players exceeds 90%.
4.2.2 Performance Comparison of Tracking
Methods
For the player B, whose performance was the best in
terms of the F-measure, we verified the effectiveness
of backward tracking. The results are shown in Table
3.
Table 3: Performance comparison with tracking methods
using Player B only (%).
(a) Video 1
Method Precision Recall F-measure
Forward
only
97.4 32.8 49.0
Forward &
backward
94.3 44.1 60.1
(b) Video 2
Method Precision Recall F-measure
Forward
only
95.1 30.9 46.9
Forward &
backward
92.6 46.1 61.6
(c) Video 3
Method Precision Recall F-measure
Forward
only
98.5 49.7 66.1
Forward &
backward
97.8 60.2 74.5
From Table 3, it is evident that adopting backward
tracking slightly decreases the precision, but greatly
improves the recall. The frames that show a specific
player must not be rejected for making of a summary-
video. Therefore, the adoption of our backward
tracking must be very effective for this off-line
purpose.
When the backward tracking is carried out, one of
the reasons why the precision decreases is that in the
backward time series of three videos, many players
are often crowded together, and the identification is
attempted even in such a situation. What is important
in specific player tracking is not the tracking in the
extreme crowding, but the tracking correctly after the
crowd disperses. In many cases, most players
participate in a set play, which means there is a high
probability of the specific player being present in a
frame. Therefore, it may be better to exclude the
extremely crowded frames for the identification and
tracking of individual players, and treat them by a
different approach. For example, the crowd detection
and the presumption of the existence of the target
player in the crowd, could improve the actual recall
performance in these cases, and implementing it is
also left for future work.
5 CONCLUSIONS
In this paper, we proposed a method for identifying
and tracking a specific player in a video sequence of
a soccer broadcast for the purpose of making a
summary video focusing on the plays of that specific
player. The method is mainly based on three deep
Who Is Your Favourite Player? Specific Player Tracking in Soccer Broadcast
739

learning techniques: object detection for player
detection, digit recognition for the jersey number
identification, and similarity discrimination for re-
identification of the target player.
Our evaluation results with nine players from
three videos show that the precision of the target
player identification is over 90% in all experiments.
However, the recall performance could be improved.
In future work, we will extract more sophisticated
features for the target player identification, such as
hair style for the case of miss-tracking and frame-out.
In addition, we will develop a mechanism to improve
the actual recall performance by considering the
players’ position and by finding extremely crowded
situations in order to stop tracking of the individual
players but keep those frames in which the target
player might be present in the summary video.
REFERENCES
Yang, Y., and Li, D. (2017). Robust player detection and
tracking in broadcast soccer video based on enhanced
particle filter. In Journal of Visual Communication and
Image Representation, volume 46, pages 81-94.
Liu, Z. J., Tong, X., Li, W., Wang, T., Zhang, Y., and
Wang, H. (2009). Automatic player detection, labeling
and tracking in broadcast soccer video. In Journal of
Pattern Recognition Letters, volume 30, no 2, pages
103-113.
Ballan, L., Bertini, M., Bimbo, A., and Nunziati, W. (2007).
Soccer players identification based on visual local
features. In Proceedings of the 6th ACM International
Conference on Image and Video Retrieval (CIVR),
pages 258-265.
Ye, Q., Huang, Q., Jiang, S., Liu, Y., and Gao, W. (2005).
Jersey number detection in sports video for athlete
identification. In Proceedings of the SPIE Visual
Communications and Image Processing (VCIP),
volume 5960, pages 1599-1606.
Saric, M., Dujmic, H., Papic, V., and Rozic, N. (2008).
Player number localization and recognition in soccer
video using hsv color space and internal contours. In
Proceedings of the 10th WSEAS International Con-
ference on Automation & Information (ICAI), pages
175-180.
Gerke, S., Müller, K., and Schäfer, R. (2015). Soccer jersey
number recognition using convolutional neural
networks. In IEEE International Conference on
Computer Vision Workshops (ICCV), pages 17-24.
Li, G., Xu, S., Liu, X., Li, L., and Wang, C. (2018). Jersey
number recognition with semi-supervised spatial
transformer network. In IEEE Conference on Computer
Vision and Pattern Recognition Workshops (CVPR),
pages 1896-1903.
IFAB. International Football Association Board | IFAB.
http://www.theifab.com/laws (2019-10-03 reference).
Redmon, J., and Farhadi, A. (2018). YOLOv3: an
incremental improvement. In arXiv:1804.02767.
Netzer, Y., Wang, T., Coates, A., Bissacco, A., Wu, B., and
Ng, A. (2011). Reading digits in natural images with
unsupervised feature learning. In Neural Information
Processing Systems Workshops, (NIPS), pages 1-9.
Bromley, J., Guyon, I., LeCun, Y., Sickinger, E., and Shah,
R. (1993). Signature verification using a "Siamese"
time delay neural network. In Proceedings of the 6th
International Conference on Neural Information
Processing Systems (NIPS), pages 737-744.
Koch, G., Zemel, R., and Salakhutdinov, R. (2015).
Siamese neural networks for one-shot image
recognition. In Proceedings of the 32nd International
Conference on Machine Learning Workshops (ICML),
volume 37.
Cao, Q., Shen, L., Xie, W., Parkhi, O. M, and Zisserman,
A. (2018). VGGFace2: A dataset for recognising face
across pose and age. In IEEE International Conference
on Automatic Face and Gesture Recognition (FG).
Kingma, D.P., and Ba, J. (2015). Adam: a method for
stochastic optimization. In Proceedings of the 3rd
International Conference for Learning Repre-
sentations (ICLR).
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
740
