
Vessel-speed Enforcement System by Multi-camera Detection and
Re-identification
H. G. J. Groot
1,a
, M. H. Zwemer
1,2,a
, R. G. J. Wijnhoven
2
, Y. Bondarev
1
and P. H. N. de With
1
1
Department of Electrical Engineering, Eindhoven University of Technology, Eindhoven, The Netherlands
2
ViNotion B.V., Eindhoven, The Netherlands
Keywords:
Maritime Traffic Management, Vessel Detection, Vessel Re-identification, Speed Enforcement Application.
Abstract:
In crowded waterways, maritime traffic is bound to speed regulations for safety reasons. Although several
speed measurement techniques exist for road traffic, no known systems are available for maritime traffic.
In this paper, we introduce a novel vessel speed enforcement system, based on visual detection and re-
identification between two cameras along a waterway. We introduce a newly captured Vessel-reID dataset,
containing 2,474 unique vessels. Our vessel detector is based on the Single Shot Multibox Detector and local-
izes vessels in each camera individually. Our re-identification algorithm, based on the TriNet model, matches
vessels between the cameras. In general, vessels are detected over a large range of their in-view trajectory
(over 92% and 95%, for Camera 1 and 2, respectively), which makes the re-identification experiments reli-
able. For re-identification, application specific techniques, i.e. trajectory matching and time filtering, improve
our baseline re-identification model (49.5% mAP) with over 20% mAP. In the final evaluation, we show that
77% (Rank-1 score) of the vessels are correctly re-identified in the other camera. This final result presents
a feasible score for our novel vessel re-identification application. Moreover, our result could be further im-
proved, as we have tested on new unseen data during other weather conditions.
1 INTRODUCTION
Maritime traffic is bound to speed regulations for
safety, especially in crowded waterways where com-
mercial and tourist vessels are mixed. Speed regu-
lation is important, since waves generated by speed-
ing vessels can cause safety risks for other waterway
users. In general, the higher the speed of a vessel,
the more water it displaces (though exceptions ex-
ist for planing speedboats). In addition to damage
to the shore-line which causes increased maintenance
costs, the water displacement may cause dangerous
currents for other waterway users, like swimmers or
small boats. Moreover, the motor sound of speeding
vessels generates noise disturbance.
Figure 1: Example images of the same vessel appearing in
Camera 1 (left) and 2 (right).
a
equal contributions
Continuous measurement of vessel speed enables
active monitoring and law enforcement. To this end,
we introduce a novel system for the application for
vessel speed enforcement on waterways. For road
vehicles, speed enforcement is a well-known sub-
ject and is typically implemented for single-location
speed measurements using magnetic loops and radar
systems. However, magnetic loops cannot be used
on waterways and radar systems are expensive and
have difficulties with irregularly manoeuvring ves-
sels. Measuring the average speed of road users more
robustly over a longer trajectory is typically imple-
mented using re-identification of vehicles between
two camera locations based on automatic license plate
recognition. In contrast to vehicles, vessels do not
have well-defined licence plates or other common vi-
sual registration markers. However, the overall ves-
sel appearance is often unique because most vessels
have different vessel type, bow, cabin or different de-
tails such as flags or buoys. Therefore, the vessel im-
age theoretically allows for re-identification of vessels
between different camera locations. However, the ap-
plication poses several challenges, such as fluctuating
weather conditions and as a consequence of these, the
highly dynamic lighting conditions at the constantly
268
Groot, H., Zwemer, M., Wijnhoven, R., Bondarev, Y. and de With, P.
Vessel-speed Enforcement System by Multi-camera Detection and Re-identification.
DOI: 10.5220/0008911202680277
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
268-277
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

moving water surface. To this end, we develop a novel
system to measure the speed of vessels over a long tra-
jectory, inherently obtaining accurate speed measure-
ments, using two cameras with visual re-identification
from raw vessel images.
In this paper, we propose the application of
accurate vessel speed measurements by visual re-
identification based on two surveillance cameras,
placed several kilometers apart. To our knowledge,
this is the first time that such a system is proposed,
tested and evaluated. Vessels are detected and tracked
within each individual camera view. Then, a re-
identification (re-ID) algorithm links vessels from one
camera to the most similar historic vessel image in
the other camera. When a vessel is recognized and
linked in both cameras, its speed is determined using
the travel time compared to the distance between the
two cameras. Our system is developed using video
data collected along a canal in the Netherlands. Fig-
ure 1 shows example images of both cameras contain-
ing the same vessel when entering and leaving the
captured area covered by the cameras. We specifi-
cally focus on three aspects: video-based vessel de-
tection and tracking, re-ID of vessels based on their
visual appearance in two cameras, and creation of an
image dataset used to train the detection- and re-ID
algorithm. The main contributions of this paper are
as follows. First, we present a combination of state-
of-the-art detection, tracking and re-ID algorithm for
vessel speed computation. Second, the system setup
is discussed of the new application of vessel speed
measurement. Third, we experiment with the dif-
ferent detection and re-identification sub-systems and
show that adding application understanding to the re-
identification problem significantly improves recog-
nition performance.
The remainder of the paper is divided as follows.
Section 2 introduces related work for all components
of our system. Next, Section 3 describes the pro-
posed system. The dataset used for the experiment
is presented in Section 4. In Section 5, the experi-
mental validation of our system is divided in the eval-
uation of the vessel detection performance and the re-
identification performance. The paper ends with con-
clusions in Section 6.
2 RELATED WORK
The proposed application consists of a complete
pipeline for visual detection and re-identification of
vessels. Limited work is available for vessel-speed
enforcement with surveillance cameras. One par-
ticular work presents ARGOS (Bloisi and Iocchi,
2009), a vessel-traffic monitoring system in the city
of Venice. This system employs surveillance cam-
eras, with slightly overlapping views, mounted high
above the waterway. The authors employ background
modeling for detection and tracking of all vessels. Al-
though background modeling achieves good perfor-
mance, in our work we focus on surveillance cameras
with more dynamic backgrounds and our system only
utilizes two cameras several kilometers apart. Other
work concentrates on unrestricted detection, tracking
and re-ID from moving vessels, to recognize other
vessels in their surroundings (Qiao et al., 2019; Bibby
and Reid, 2005). In the following paragraphs, we dis-
cuss related work for detection and re-identification.
Besides this, we discuss publicly available datasets.
A. Detection Techniques: In the generic field of vi-
sual object detection, Convolutional Neural Networks
(CNNs) achieve state-of-the-art performance. Cur-
rently, there are two dominant kinds of CNN detec-
tion techniques. The first technique splits the prob-
lem into two stages: region proposal and refinement.
These stages are combined into a single CNN (Gir-
shick, 2015; Ren et al., 2015) and may even per-
form instance segmentation in the refinement step (He
et al., 2017). The other common CNN detection tech-
nique is to skip the region proposal step altogether
and estimate bounding boxes directly from the input
image such as YOLO (Redmon et al., 2016; Redmon
and Farhadi, 2017) and Single Shot Multibox Detec-
tor (Liu et al., 2016). YOLO uses the topmost feature
map to predict bounding boxes directly for each cell
in a fixed grid. The SSD detector extends this concept
by using multiple default bounding boxes with vari-
ous aspect ratios at several scaled versions of the top-
most feature map. Prior work (Zwemer et al., 2018)
shows that the SSD detector is robust against large-
scale variations of vessels. We select the SSD detector
for our application because of the relatively low com-
putational requirements and high accuracy, proven for
the vessel detection problem. Moreover, since the de-
tector can operate at a high frame rate and its related
requirements for the visual tracking method are lim-
ited (only one object type and mostly a clear view of
the object), which enables the use of a computation-
ally efficient tracking algorithm.
B. Re-identification Algorithms: For re-ID, all related
work is mainly focused on the person re-identification
domain. However, we can experiment and apply the
same techniques to our vessel application. Based on
road vehicle applications, the performance of state-
of-the-art re-ID algorithms has been recently eval-
uated (Chen et al., 2019), showing that re-ID net-
works generalize to other domains. In the last decade,
visual-based re-ID has become more mature due to
Vessel-speed Enforcement System by Multi-camera Detection and Re-identification
269

the general developments in CNNs (Karanam et al.,
2019) and can be divided in two main techniques:
pairwise verification and metric embedding. Pairwise
verification networks usually apply the contrastive
loss during training, while for metric embedding the
triplet loss is popular (Hermans* et al., 2017). Pair-
wise verification networks are commonly Siamese
networks (Ahmed et al., 2015) and are trained on im-
age pairs. These networks then learn to differentiate
different persons by increasing the feature distance,
while decreasing the distance for two images of the
same person. Alternatively, metric embedding net-
works consider image triplets, considering two im-
ages from the same person and one from a different
person. As a result, metric embedding networks uti-
lize inter-class variance in the resulting embedding
space more efficiently. The TriNet model (Hermans*
et al., 2017) builds upon a customized ResNet-50 ar-
chitecture and is suitable for embedded applications
because of its low computational complexity. Another
commonly exploited technique is to force the network
to separately focus on e.g. head, body and legs of
persons (Wang et al., 2018). However, vessels are
much more diverse in appearance. Cargo vessels are
for instance very long, while sailing yachts often have
height exceeding their length. In this paper, we pro-
pose to employ a state-of-the-art TriNet model (Her-
mans* et al., 2017) with its attractively low complex-
ity.
C. Datasets: For our specific vessel application, both
the CNN detector and re-ID network require a vessel
image dataset for training. Regarding generic visual
object detection, popular datasets are MS-COCO (Lin
et al., 2014), ImageNet (Russakovsky et al., 2015)
and PASCAL-VOC (Everingham et al., 2012). Al-
though these datasets do contain vessel images, they
are only taken from very different camera viewpoints
not matching with our surveillance scenario. The
dataset proposed by (Zwemer et al., 2018) contains
vessels in surveillance scenarios with multiple cam-
era viewpoints and can be used for training a vessel
detector. As this dataset does not contain vessel tra-
jectories and identifications of the vessels, it cannot
be used for training the re-ID network. Regarding re-
identification, the most commonly used datasets focus
on persons, such as DukeMTMC-reID (Zheng et al.,
2017) and Market-1501 (Zheng et al., 2015), so that
they cannot be applied for vessel re-ID. Consequently,
we introduce a novel large vessel dataset containing
trajectories and identifications, which is used to train
our vessel re-ID CNN.
Camera 1
Camera 2
Re-identification Match
Match
Gallery 1
Gallery 2
Re-identification
Query
Query
Detection
Trajectory
selection
Tracking
Detection
Trajectory
selection
Tracking
Figure 2: System overview.
3 SYSTEM OVERVIEW
The proposed system is divided in two compo-
nents (see Figure 2): vessel detection and vessel re-
identification to link vessels between the two cameras.
The first component performs real-time detection and
tracking of vessels for each camera individually. For
the second component, a set of vessel images is ex-
tracted and stored for re-identification, for each de-
tected vessel. Each vessel image is used both as a
query image and as a reference image, where the ref-
erence images are stored in the so-called gallery for
future queries from the other camera. The query im-
age is thus needed when matching it with vessels that
have previously appeared in the other camera. Since
our application focuses on speed enforcement, gallery
images of vessels are accumulated until the applica-
tion constraints invalidate those vessel images that do
not relate to a speed violation (travel time too long).
For every detected vessel, the re-identification query
results in the best matching object from the gallery
set of the other camera. After finding a match for
a vessel query image, the travel time of that vessel
is determined by comparing the times of appearance
within both cameras. Since the distance between the
two cameras is known and fixed, the travel time leads
directly to the average vessel speed. In the following
subsections, the implementations of both components
are discussed in more detail.
3.1 Detection, Tracking and Trajectory
Selection
Vessel detection is performed using the Single Shot
Multibox Detector (SSD) (Liu et al., 2016). This de-
tector consists of a base network and a detection head.
The input of the detector is an image of 512 × 512
pixels from which the base network computes fea-
tures. The detection head consists of several convo-
lutional layers which create downscaled versions of
these features. The detection head predicts an object
confidence and bounding box on each of these fea-
ture layers. The box is predicted using offsets to a
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
270

Camera 1 Camera 2
Cam1 to Cam2
Cam2 to Cam1
Cam1:
Going in/out
Cam2:
Going in/out
Figure 3: Schematic overview of the two cameras posi-
tioned along the main waterway (top-view).
set of fixed prior boxes. The output of the detection
head is created by combining the class confidences,
location offsets and prior boxes of all feature layers.
These combinations are then filtered by thresholding
the class confidences followed by non-maximum sup-
pression, based on the Jaccard overlap (IOU) of the
boxes, leading to the final set of detections.
To match the input resolution of the SSD detector
network, a square region in the camera image is se-
lected, cropped and scaled to 512 × 512 pixels. Ves-
sel detection by the SSD network is performed at 5
frames per second. To create trajectories over time,
visual tracking is performed. Tracking is carried out
using feature point tracking (Shi and Tomasi, 1994)
with optical flow. Within each detection box, a uni-
form grid of feature points is created and new posi-
tions of each point are estimated in the next frame
based on their optical flow. The median displacement
of the feature points determines the new position es-
timate of the vessel box. This process is repeated for
every consecutive video frame.
The result after detection and tracking for each
vessel is a set of bounding-box coordinates over time,
representing the vessel trajectory. These trajectories
are temporally sampled (every second) and the result-
ing selected vessel images are then used for re-ID be-
tween the two cameras.
3.2 Re-identification (re-ID)
The re-ID system receives vessel images of a detected
vessel from one camera and is responsible for finding
the corresponding vessel in the images from the other
camera. The re-identification task is performed us-
ing the TriNet model (Hermans* et al., 2017). Each
vessel image is converted into a low-dimensional fea-
ture representation. To this end, each vessel image
is first scaled to a resolution of 288 × 144 pixels and
then randomly cropped to 256 × 128 pixels to match
the input of the ResNet-50 base network of the TriNet
model. The last layer of the ResNet-50 model is re-
placed by two fully connected layers of 1024 and 128
units. Each of the vessel images in a vessel trajec-
tory is converted to this 128-dimensional feature rep-
resentation and stored in the gallery of the respective
camera. The system is trained end-to-end and uses
the triplet loss function to perform deep metric learn-
ing. Each training sample is a combination of two
feature vectors of a similar vessel and a single fea-
ture vector of a different vessel. After training the
re-ID model, the model is used to determine the sim-
ilarity between one known gallery image and a pre-
viously unseen vessel image (query). During typical
system operation (inference only), matching is imple-
mented by computing the Euclidean distance between
the query feature vector and each gallery feature vec-
tor. This results in a similarity score for each gallery
image. The most similar gallery image defines the
matching object.
We now propose to use three application aspects
of understanding to improve the performance of our
re-identification system. Firstly, we utilize multiple
query images per vessel and propose to accumulate
the similarity scores for all query images to improve
accuracy. Each query image is matched individually
and the per-gallery-image similarity scores are com-
bined over the different query images (by summa-
tion). The gallery image with the highest summed
similarity score defines the matching object. Sec-
ondly, based on the minimum and maximum travel
time of vessels, a time selection limits the size of
the galleries of both cameras. This aspect always
increases the accuracy because false matches are re-
duced from the search (gallery) set. Lastly, vessels
from Camera 1 only need to be matched with vessels
from Camera 2, and vice versa. Hence, we ensure
that the gallery only contains images from a single
camera. The effectiveness of each aspect will be eval-
uated later in the experiments section.
4 VESSEL DATASET
We introduce our novel Vessel-reID dataset contain-
ing vessels in two cameras, spaced about 6 kilome-
ters apart along a canal in the Netherlands. The set
was recorded over 4 days and contains 2,474 vessels,
each sampled with multiple images, and linked be-
tween the two cameras. Figure 3 shows a schematic
overview of the positions of the cameras. Note that
the connecting canal is not covered by any camera
(at the top in the figure). This causes some vessels
to appear in one camera, but not in the other camera.
However, this is a side canal and the majority of the
vessels use the main canal and pass both cameras.
The Vessel-reID dataset is created semi-
automatically using an existing ship detector and
tracker. For each day of video, we first process each
Vessel-speed Enforcement System by Multi-camera Detection and Re-identification
271
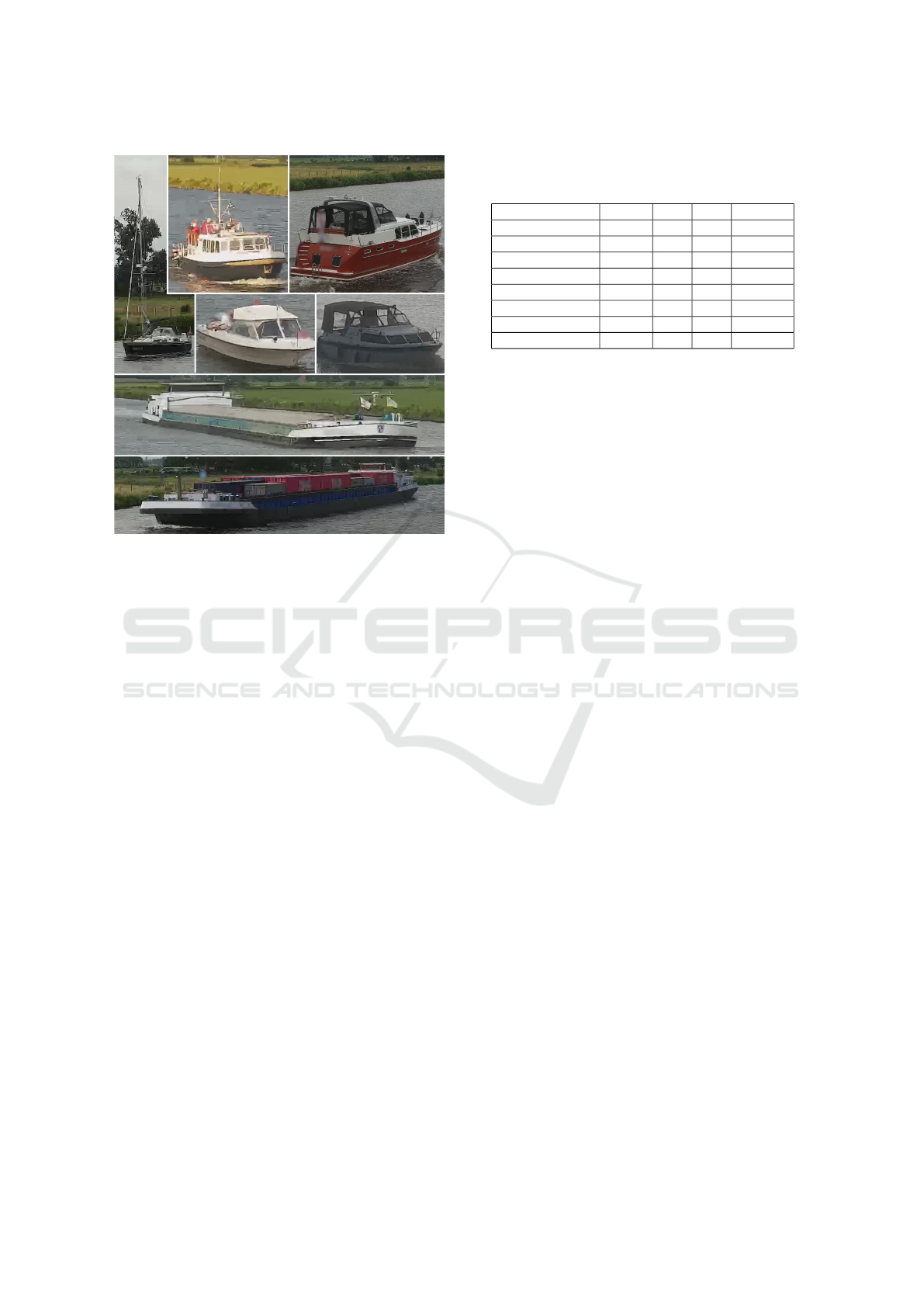
Figure 4: Visual examples of several types of vessels in our
Vessel-reID dataset.
camera stream individually to extract per-camera
trajectories of vessels. The video is processed with
an existing vessel detector (Zwemer et al., 2018) to
identify vessels and track them over time through
the camera view, as is proposed in the final system
(see Figure 2). The obtained vessel trajectories are
temporally sub-sampled (every second). Manual
validation of detection and tracking are performed
to enforce accurate localization and full coverage of
all vessels. To increase the annotation accuracy of
our semi-automatic creation of the initial dataset,
the vessel detector is retrained with the annotations
of the first day of video for both cameras prior to
applying it on the data of the other days. After
creating trajectories of the two individual cameras,
the vessels in the two cameras are manually linked
together to define the final ground truth.
In total, we have annotated 4 days of video from
6.00 AM until 9.00 PM from both cameras. This re-
sulted in 2,474 trajectories of vessels moving through
both cameras (1,237 per camera) of which we have
one representative sample per second. On average,
there are 44 samples of a vessel in Camera 1 and
66 samples in Camera 2. The different numbers can
be explained by the different viewing angles of both
cameras, resulting in differently covered canal lengths
(see Figure 1). Figure 5 shows example trajectories of
vessels in Camera 1 and 2. Table 1 gives an overview
of the vessel trajectories per day. Note that about 38%
of the vessels are moving into the side canal, mooring
at a local harbour or appear in one camera only.
Table 1: Number of vessels going in each direction per day.
Direction Day 1 2 3 4 (Test)
Cam1 to Cam2 178 104 167 181
Cam2 to Cam1 155 134 176 142
Cam1 going in 34 23 45 31
Cam2 going in 31 30 50 33
Cam1 going out 25 28 41 33
Cam2 going out 24 27 40 44
Total Cam1 392 289 429 387
Total Cam2 388 295 433 400
5 EXPERIMENTS
Our experiments focus on the evaluation of the vi-
sual detection and vessel re-identification compo-
nents. The first two experiments focus on the ves-
sel detector, while the remainder of the evaluations
measure the performance of our re-identification ap-
plication. For re-identification, we first validate our
dataset and then incrementally apply and evaluate our
three specific application aspects of understanding.
We conclude the experiments with a final application-
oriented evaluation.
5.1 Detection Performance
For measuring detection performance, we compare
four SSD detectors with the same CNN network ar-
chitecture but trained with different datasets. The
first detector is the original SSD512 detector (Liu
et al., 2016) trained on the PASCAL-VOC 2007 and
2012 sets (Everingham et al., 2012). The second de-
tector is proposed by Zwemer et al. and is trained
on their harbour surveillance dataset (Zwemer et al.,
2018). The third detector is trained on a combina-
tion of the harbour surveillance dataset and our novel
Vessel-reID dataset. The fourth detector is trained on
our novel dataset only.
Training is performed using Stochastic Gradient
Decent (SGD) for 120k iterations, starting at a base
learning rate of 0.001, decaying with a factor of 10
at 80k and 100k iterations. The SSD model weights
are initialized with the default pre-trained VGG net-
work (Liu et al., 2016). Weight decay is set to 0.0005,
gamma is 0.1 and we use a batch size of 32. Days 1, 2
and 3 are used for training. Day 4 is used for testing.
All four detectors are evaluated both on the har-
bour surveillance set from (Zwemer et al., 2018) and
on the novel Vessel-reID dataset. The comparison
is based on the recall-precision curve and the Area
under the recall-precision Curve (AuC) metric. Fig-
ure 6 shows the results on our Vessel-reID set and Fig-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
272
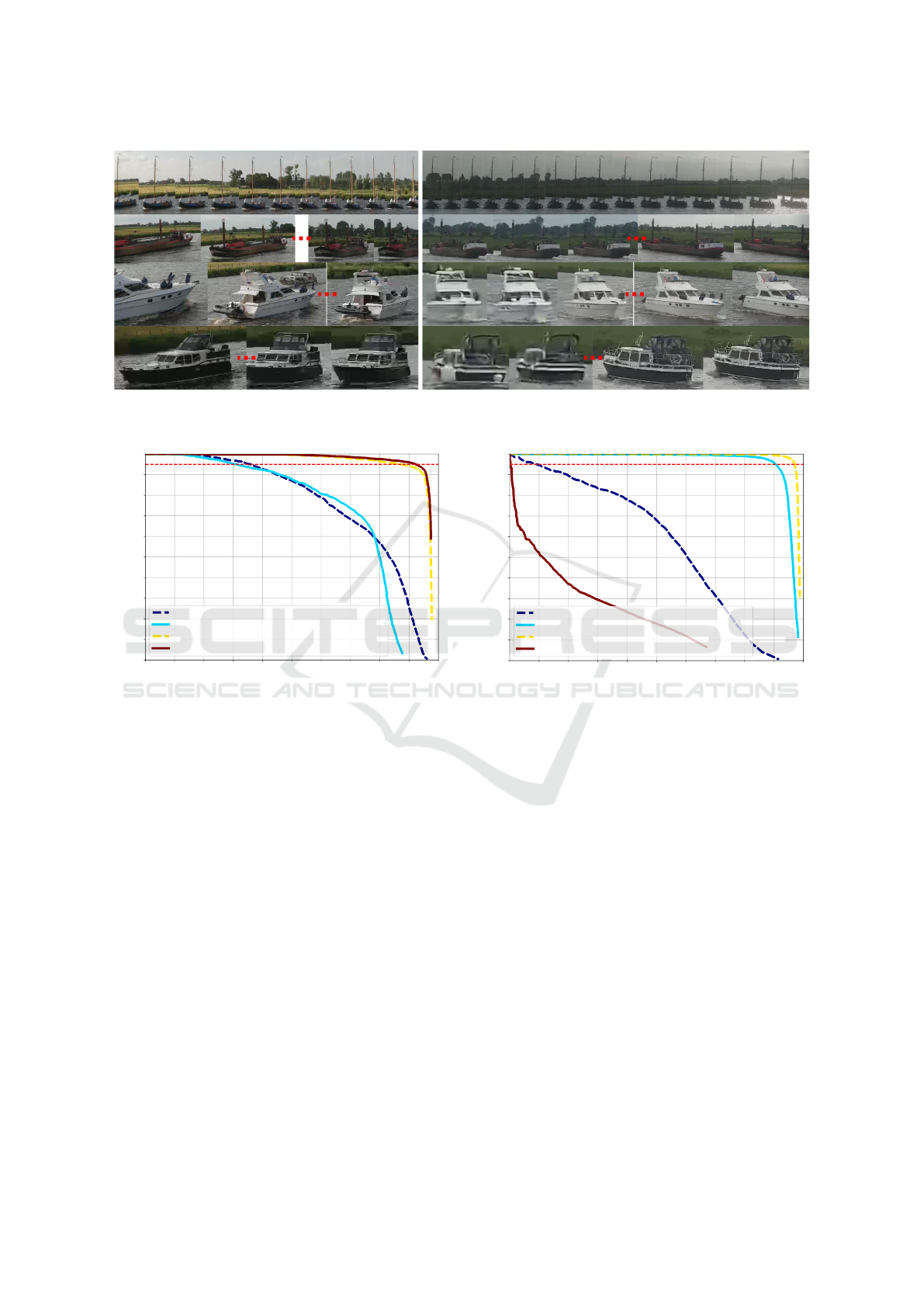
Figure 5: Visual example of several vessel trajectories in Camera 1 (left) and Camera 2 (right), where each row shows a
unique vessel in our dataset. Some images are skipped for visualization (denoted by dotted red line).
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
SSD512 Original , AUC: 75%, R@95: 36.0%
Harbour , AUC: 73%, R@95: 31.4%
Harbour + VesselReID, AUC: 96%, R@95: 87.3%
VesselReID , AUC: 96%, R@95: 92.3%
Recall
Precision
Figure 6: Vessel detection performance on the Vessel-reID
set.
ure 7 depicts the results on the harbour surveillance
set (Zwemer et al., 2018). The default SSD detector
(dotted blue line) performs poorly on both datasets.
Interestingly, the harbour (solid cyan line) and Vessel-
reID (solid red line) detectors perform well on their
own set, but have poor detection performance on the
other set. This indicates that the sets are comple-
mentary, which is motivated by the information that
the harbour set contains mostly large inland and sea-
going cargo vessels, while the Vessel-reID contains
mostly small pleasure craft. Training with the com-
bined sets (dotted yellow) leads to the highest detec-
tion performance on both datasets. Therefore, we se-
lect the detector trained with the combined harbour
and Vessel-reID sets for our next experiments.
5.2 Detection for Re-identification
In our application of re-ID, it is important that each
vessel is detected at least once in both cameras. Our
testing dataset contains several images of the tra-
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
SSD512 Original , AUC: 56%, R@95: 9.3%
Harbour , AUC: 95%, R@95: 90.6%
Harbour + VesselReID, AUC: 98%, R@95: 97.0%
VesselReID , AUC: 21%, R@95: 0.3%
Recall
Precision
Figure 7: Vessel detection performance on the harbour
surveillance set (Zwemer et al., 2018).
jectory of each vessel, allowing us to measure the
amount of detections per vessel over its trajectory.
In this experiment, for each vessel, we measure the
detection ratio, i.e. the amount of correct detections
with respect to the amount of ground-truth annota-
tions. This detection ratio is reported over all vessel
trajectories per camera location in our dataset using a
histogram representation. For the detector, we have
selected the threshold at 95% precision to limit the
amount of false detections, while still having a high
recall of 87.3%.
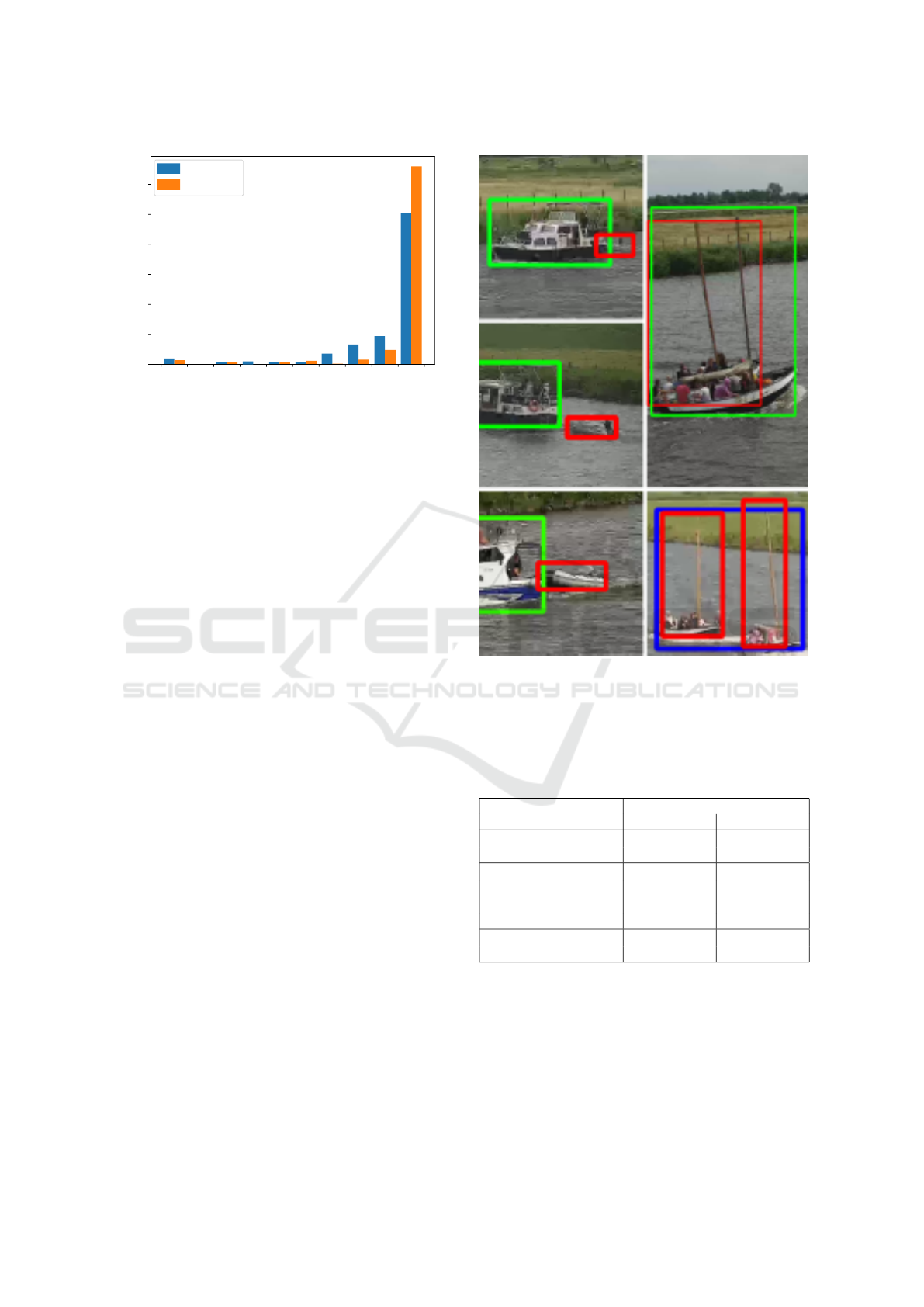
Figure 8 shows the results per camera. In general,
many vessels are detected over more than 90% of their
trajectory and almost all vessels have a trajectory cov-
erage of more than 60%. Unfortunately, there are few
vessels (10 in camera 1 and 7 in camera 2) that are
not detected at all. Visual inspection of these missed
vessels shows that they are typically very small boats
(such as ‘dinghies’ behind larger boats) or boats mov-
ing close together (see Figure 9).
This experiment shows that our detector has a high
Vessel-speed Enforcement System by Multi-camera Detection and Re-identification
273
0.0 0.2 0.4 0.6 0.8 1.0
0
50
100
150
200
250
300
Camera 1
Camera 2
#Vessels
Percentage of trajectory found
0.1
0.3 0.5 0.7 0.9
Figure 8: Percentage of trajectory detected.
detection accuracy and delivers a dense set of image
samples for our re-identification sub-system. For re-
identification, it is important to detect each vessel at
least once. Although we have a few vessels that are
never detected, they are mostly attached to a larger
boat (‘dinghies’), which does not influence the re-
identification performance, since the main vessel is
detected. Missed vessels that are close to each-other,
require the combined vessel to be detected for correct
re-identification in both cameras.
5.3 Re-identification Hyper-parameters
In a first re-identification experiment, we evaluate the
effect of the main hyper-parameters for training. As
motivated by (Hermans* et al., 2017; Groot et al.,
2019), we evaluate the learning rate, the number of
iterations and the start iteration of the learning rate
decay. A total of eight different parameter combina-
tions is evaluated five times and averages and stan-
dard deviations are reported. This experiment is car-
ried out on a subset of the total dataset (only our test
set, Day 4). Evaluation is performed analogous to
the most popular person re-ID datasets (Zheng et al.,
2015; Zheng et al., 2017) on 10% of our test set, while
the remaining 90% of the vessels are used for train-
ing. For each vessel trajectory in the test set, a single
random sample is moved to our query set and the re-
maining samples are added to the gallery.
The results are shown in Table 2. The bold settings
are the values as used in (Hermans* et al., 2017) and
act as reference. We can conclude that the effect of
the different parameter combinations is limited. The
learning rate of 0.001 does not lead to stable training
and should be avoided. The effect of the number of
training iterations is negligible. Therefore, we select
the following parameters for the remainder of our ex-
periments: learning rate 3 × 10
−4
, 25k iterations and
Figure 9: Correct detections (green), Missed (red) and false
(blue) detections of our vessel detector.
Table 2: Effect of the learning rate (Lr), number of iter-
ations (Iter) and start of the learning rate decay (Dec) on
re-identification accuracy. Reported numbers are averages
(stddev) over 5 runs. Reference and selected settings in
bold.
Lr Iter Dec Accuracy [%]
mAP Rank-1
1 · 10
−4
25k 15k 71.4 (±2.8) 73.3 (±2.8)
35k 20k 72.7 (±2.6) 74.3 (±3.2)
3 · 10
−4
25k 15k 69.2 (±1.0) 72.7 (±1.5)
35k 20k 69.5 (±2.7) 72.4 (±4.8)
5 · 10
−4
25k 15k 69.6 (±2.7) 73.0 (±2.0)
35k 20k 69.8 (±3.7) 76.4 (±4.0)
1 · 10
−3
25k 15k 57.0 (±22.3) 59.4 (±22.6)
35k 20k 66.1 (±2.0) 71.2 (±2.4)
a learning rate decay of 0.001 after 15k iterations.
5.4 Re-identification Training Data
We will now investigate the effect of the amount of
training data on the re-identification performance. To
this end, we first train using a single day of training
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
274
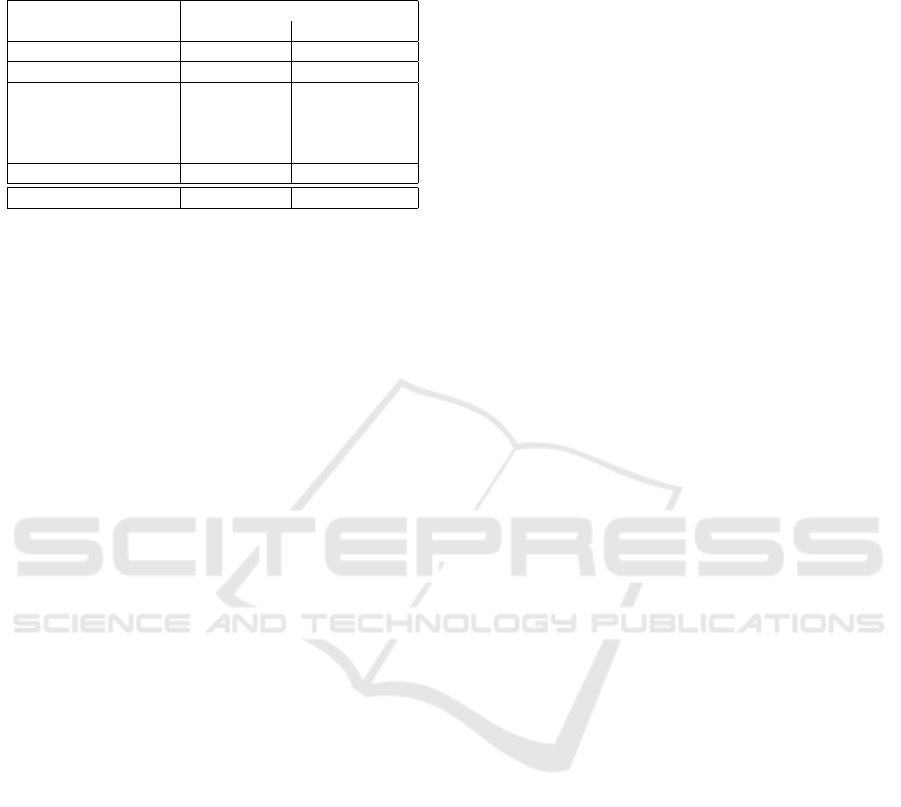
Table 3: Re-identification performance on our Vessel-reID
dataset, when incrementally applying application aspects
(see Section 3.2). Results are averages (stddev) over 5 runs.
Scores on validation set [%]
Description mAP Rank-1
VesselReId (Day 3) 36.2 (±0.9) 42.9 (±1.5)
VesselReId (full) 49.5 (±1.0) 55.6 (±1.7)
+ Tracklet
Sum of ALL 54.8 (±0.6) 61.5 (±0.8)
Sum of Top-10 56.2 (±0.6) 63.6 (±0.9)
Sum of Top-15 56.3 (±0.6) 63.7 (±1.0)
+ Time filtering 59.6 (±0.8) 65.7 (±1.0)
+ Only cross-camera 71.0 (±0.9) 77.3 (±1.3)
data (Day 3), resulting in a 50/50 train/test distribu-
tion which is common in re-ID. Secondly, we train
utilizing the full three days of our Vessel-reID set.
The test set is as defined in our Vessel-reID dataset
(Day 4), where the query and gallery sets are con-
structed in a similar way as in our previous experi-
ment (one random sample per vessel trajectory in the
query set). The performance is reported by the mean
average precision (mAP) and Rank-1 score, including
standard deviation, measured over 5 training runs.
The results are presented in Table 3. It can be
observed that when training on all data (Vessel-reID
(full)), the performance is significantly higher than
when training on only a single day of data (Vessel-
reID (Day 3)). The results on our dataset show a large
performance gap when comparing to the performance
of the TriNet model on public datasets. The TriNet
model performs better on popular public person re-
ID datasets, DukeMTMC (rank-1 75.4%, see (Groot
et al., 2019)) and Market-1501 (mAP 69.1%, Rank-
1 84.9%, see (Hermans* et al., 2017; Groot et al.,
2019)). We expect that this originates from the fact
that our 50/50 train/test distribution results in a train-
ing set containing half the amount of unique objects
with respect to these datasets. Furthermore, even
when training with more data (3 days in our train set),
the re-ID performance is still relatively low. This is
explained by the fact that the test set was recorded
during a completely different day with changed con-
ditions, while the validation set of the public person
re-ID datasets are recorded under the same conditions
as the training. In the remainder of the paper, we train
using all training data (row Vessel-reID (full)).
5.5 Re-identification Tracklet-based
Querying
In our tracklet-based query approach, we no longer
consider a single image as a query. Instead, we apply
inference on every image appearing in a single trajec-
tory of a vessel. By applying inference on the whole
tracklet, we can effectively combine the results of all
images in the tracklet, instead of just one (randomly
selected) image, which is common in re-ID. However,
this approach has an impact on the final evaluation.
If we would still adopt the common query/gallery di-
vision approach, we have to move each query from
the gallery into the query set. This would now lead
to an empty gallery set, because we use all images
of a tracklet as a single query, instead of just one
image. Therefore, we propose to keep all images in
the gallery and consider one tracklet at a time as the
query. Furthermore, we have carefully validated that
this changed gallery alone has a negligible impact on
performance.
Matching of a tracklet query is performed by com-
puting the Euclidean distance of each individual im-
age in a tracklet to those in the gallery. Consequently,
for each gallery image, the distance to all tracklet im-
ages is known, which we then combine in three dif-
ferent ways. First, in our most basic version, we take
the sum of all these distances. Once this is done for
all gallery images, we rank the gallery accordingly to
obtain all most likely matches for the tracklet query.
Second, we only take the top-10 most likely matches
for the tracklet query. Third, we only take the top-
15 matches. Ranking is done similarly for all meth-
ods. The results are shown in Table 3 and applied on
top of our baseline model. Evidently, tracklet-based
matching is significantly beneficial for re-ID, achiev-
ing a performance gain of 5.3% mAP for matching all
tracklet images (54.8%). Further improvement can
be seen for the top-10 (56.2%) and top-15 (56.3%)
matching methods. Overall, using multiple images
as query request, results in a significant performance
gain as compared to a single-image query. In our ap-
plication of vessel re-ID, the Top-15 matching method
works best and is therefore selected.
5.6 Re-identification Time Filtering
In this experiment, we evaluate our time-filtering ex-
tension, which is applied on top of our tracklet-based
querying extension. For this extension, we were in-
spired by our application, but it can be directly applied
to other object classes such as persons or vehicles.
Inspection of our Vessel-reID dataset shows that
the vessels take an average travel time of around
32 minutes between cameras. Furthermore, we have
found that none of the ships require longer than
3 hours to pass. Hence, we exclude any possible
matches where the implied transition time is longer
than 3 hours. This filtering is applied on top of the
top-15 variant of our tracklet-based querying method.
Vessel-speed Enforcement System by Multi-camera Detection and Re-identification
275

The result is presented in Table 3 and shows that in-
cluding timing information significantly improves the
mAP score by 3.3% and the Rank-1 by 2.0%. Our re-
sult indicates that incorporating timing information in
re-ID yields higher performance, and can be directly
applied to other re-ID applications.
5.7 Application-based Evaluation
In our previous experiments, we have used the evalu-
ation methods commonly adopted in re-ID. In these
methods, each query image is matched to a com-
bined gallery, consisting of images from both cam-
eras. Given our application, we specifically require
matching a query from one camera to the gallery of
another camera, and vice versa. In this experiment,
we change this generic method of evaluation such
that it only considers images of the other camera in
the gallery (thus only cross-camera). Evaluating with
these constraints will provide insight in the final per-
formance of our specific application in practice.
We evaluate the performance of re-ID for our ap-
plication with the top-15 tracklet-based querying ap-
proach and additional time filtering. The bottom row
of Table 3 shows the result of combining these ap-
proaches with our cross-camera evaluation method.
For our application, a re-ID performance score of
71.0% mAP and 77.3% Rank-1 is achieved. Hence,
77% of the vessels are correctly re-identified in the
other camera. This final result is attractive in two
ways. First, the obtained Rank-1 score is comparable
with systems for person re-ID, meaning that we have
obtained the same level of quality in re-ID in an oth-
erwise novel application. Second, our result is con-
servative, because we have tested on new unseen data
during other conditions, instead of mixing the condi-
tions of training and testing (typical for person re-ID).
6 CONCLUSIONS
We have proposed the novel application of vessel
speed measurement using visual re-identification. To
our knowledge, this is the first time that an auto-
mated trajectory speed measurement for vessels has
been proposed. In addition, it is the first time that
re-identification has been applied to vessels, as re-
identification literature typically considers the person
class. The proposed system uses a setup with two
cameras, spaced several kilometers apart. Each cam-
era system applies detection and tracking to localize
all vessels in its own camera view. Then, multiple
images are collected for each vessel and stored in a
database for visual vessel matching between the two
cameras. The proposed re-identification system com-
pares newly detected vessels in one camera as query
to the gallery set of all vessels detected in the other
camera, and vice versa. For our implementation, we
use the Single Shot Multibox Detector (SSD) with
a VGG base network and train it specifically to lo-
calize vessels. Re-identification is implemented us-
ing the TriNet model with a ResNet-50 base network,
trained with the Triplet loss function on our Vessel-
reID dataset.
For this purpose, we have introduced a novel
Vessel-reID dataset. This extensive vessel dataset
was constructed from two camera positions mounted
6 kilometers apart at a canal in the Netherlands. Dur-
ing four days, a total of 2,474 different vessels were
captured. Each vessel is represented by multiple im-
ages captured along its trajectory in the camera view.
The set contains a large variation in vessel appear-
ance, where most vessels are pleasure crafts.
The performance of the detection and re-
identification systems are experimentally validated.
We have compared the detection performance of four
different SSD detectors and conclude that training
on a combination of a harbour dataset and our new
Vessel-reID dataset results in the best performance
on both sets. This can be explained by the harbour
set containing mostly inland and sea-going vessels,
whereas the Vessel-reID set is complementary with
mostly pleasure crafts. Of the total set of 787 vessels
in the test set, only 14 vessels are missed and therefore
not considered for re-identification. In general, ves-
sels are detected over a large range of their in-view
trajectory (over 92% and 95%, for Camera 1 and 2,
respectively), making the re-ID experiment reliable.
For re-identification, after tuning the system
hyper-parameters, we have added application-specific
techniques for understanding vessel re-identification.
First, combining re-identification scores over multiple
images of the same vessel increases the performance
with 6.8% mAP (8.0% Rank-1). An additional time-
filtering stage adds another 3.3% mAP (2.0% Rank-
1), leading to a combined performance of 59.6% mAP
and a Rank-1 score of 65.7%, without re-ranking. Fi-
nally, when we evaluate the re-identification perfor-
mance specifically for our application, we show that
77% (Rank-1) of the vessels are correctly re-identified
in the other camera. This final result is attractive in
two ways. First, the obtained Rank-1 score presents
a feasible score for our novel application of vessel re-
identification. Second, our result is still conservative,
because we have tested on new unseen data during
other weather conditions, instead of mixing data of
all captured conditions.
The proposed system enables the automatic speed
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
276

measurement of vessels over a large-distance trajec-
tory. Despite the obtained high performance of the
system, the current process of law enforcement still
requires the intervention of a human operator. How-
ever, the performance of our automated system is
approaching the level of directly supporting law en-
forcement.
ACKNOWLEDGEMENTS
We want to thank the Dutch Ministry of Infrastruc-
ture and Water Management for supporting the exper-
iments and providing access to the test location. Parts
of this work were funded by the European ITEA PS-
Crimson project on surveillance.
REFERENCES
Ahmed, E., Jones, M., and Marks, T. K. (2015). An
improved deep learning architecture for person re-
identification. In CVPR, pages 3908–3916.
Bibby, C. and Reid, I. (2005). Visual tracking at sea.
In Proceedings of the 2005 IEEE Int. Conference on
Robotics and Automation, pages 1841–1846. IEEE.
Bloisi, D. and Iocchi, L. (2009). Argos—a video surveil-
lance system for boat traffic monitoring in venice. In-
ternational Journal of Pattern Recognition and Artifi-
cial Intelligence, 23(07):1477–1502.
Chen, H., Lagadec, B., and Bremond, F. (2019). Partition
and reunion: A two-branch neural network for vehicle
re-identification. In CVPR Workshops.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2012). The PASCAL Visual
Object Classes Challenge 2012 (VOC2012) Results.
Girshick, R. (2015). Fast R-CNN. In Proceedings of the
International Conference on Computer Vision.
Groot, H., Bondarau, E., et al. (2019). Improving person re-
identification performance by customized dataset and
person detection. In IS&T International Symposium
on Electronic Imaging 2019, Image Processing: Al-
gorithms and Systems XVII.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN. In Proceedings of the International
Conference on Computer Vision.
Hermans*, A., Beyer*, L., and Leibe, B. (2017). In Defense
of the Triplet Loss for Person Re-Identification. arXiv
preprint arXiv:1703.07737.
Karanam, S., Gou, M., Wu, Z., Rates-Borras, A., Camps,
O., and Radke, R. J. (2019). A systematic evaluation
and benchmark for person re-identification: Features,
metrics, and datasets. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 41(3):523–536.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean Conference on Computer Vision, pages 740–755.
Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In ECCV, pages 21–37. Springer.
Qiao, D., Liu, G., Zhang, J., Zhang, Q., Wu, G., and
Dong, F. (2019). M3c: Multimodel-and-multicue-
based tracking by detection of surrounding vessels in
maritime environment for usv. Electronics, 8(7):723.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In IEEE CVPR, pages 779–788.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. In IEEE CVPR, pages 6517–6525.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In NIPS.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Shi, J. and Tomasi, C. (1994). Good features to track. In
1994 Proceedings of IEEE Conference on Computer
Vision and Pattern Recognition, pages 593–600.
Wang, G., Yuan, Y., Chen, X., Li, J., and Zhou, X. (2018).
Learning discriminative features with multiple granu-
larities for person re-identification. In 2018 ACM Mul-
timedia Conference on Multimedia Conference, pages
274–282. ACM.
Zheng, L., Shen, L., Tian, L., Wang, S., Wang, J., and Tian,
Q. (2015). Scalable person re-identification: A bench-
mark. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 1116–1124.
Zheng, Z., Zheng, L., and Yang, Y. (2017). Unlabeled
samples generated by gan improve the person re-
identification baseline in vitro. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 3754–3762.
Zwemer, M. H., Wijnhoven, R. G., and de With, P. H. N.
(2018). Ship detection in harbour surveillance based
on large-scale data and cnns. In Proceedings of the
13th International Joint Conference on Computer Vi-
sion, Imaging and Computer Graphics Theory and
Applications - Volume 5: VISAPP,, Funchal, Madeira,
Portugal. INSTICC, INSTICC.
Vessel-speed Enforcement System by Multi-camera Detection and Re-identification
277
