
Vehicle Detection and Classification in Aerial Images using Convolutional
Neural Networks
Chih-Yi Li
1
and Huei-Yung Lin
2
1
Department of Electrical Engineering, National Chung Cheng University, Chiayi 621, Taiwan
2
Department of Electrical Engineering and Advanced Institute of Manufacturing with High-tech Innovations,
National Chung Cheng University, Chiayi 621, Taiwan
Keywords:
Aerial Image, Convolutional Neural Network, Vehicle Detection.
Abstract:
Due to the popularity of unmanned aerial vehicles, the acquisition of aerial images has become widely avail-
able. The aerial images have been used in many applications such as the investigation of roads, buildings,
agriculture distribution, and land utilization, etc. In this paper, we propose a technique for vehicle detection
and classification from aerial images based on the modification of Faster R-CNN framework. A new dataset for
vehicle detection, VAID (Vehicle Aerial Imaging from Drone), is also introduced for public use. The images
in the dataset are annotated with 7 common vehicle categories, including sedan, minibus, truck, pickup truck,
bus, cement truck and trailer, for network training and testing. We compare the results of vehicle detection in
aerial images with widely used network architectures and training datasets. The experiments demonstrate that
the proposed method and dataset can achieve high vehicle detection and classification rates under various road
and traffic conditions.
1 INTRODUCTION
In recent years, due to the popularity of unmanned
aerial vehicles (UAVs), the acquisition of aerial im-
ages has become more convenient. A large volume of
aerial images can be obtained very quickly. The use
of big data is a trend of the future research related
to aerial image analysis. The techniques for aerial
images has been adopted in many applications such
as the investigation of roads, buildings, agriculture
distribution, and land utilization, etc. One specific
importance is the detection of vehicles from aerial
imaging. This type of vehicle detection is suited for
transportation related work including traffic monitor-
ing, vehicle identification and tracking, parking anal-
ysis and planning. At the same time, the technol-
ogy maturity of UAV with the characteristics of being
lightweight, inexpensive and flexible makes the aerial
photography easily apply to the traffic data collection
and emergency response. Thus, it will be helpful and
efficient in the applications if the analysis of aerial
images can be accelerated.
The content of aerial images generally covers a
large number of objects, including trees, lands, roads
and buildings, etc. In the early research, satellite im-
agery was used to analyze the landscape, the distri-
bution of forest, land usage, river and road areas. It
has also been used for the detection of special build-
ings or large venues in the past few decades, espe-
cially for the military purposes such as aircraft and
runway detection. Due to the advances of deep learn-
ing techniques in recent years, object detection can be
achieved under complex backgrounds and a variety of
application scenarios. Thus, it becomes more feasible
to use aerial images for the detection and classifica-
tion of vehicles.
The methods for vehicle detection in aerial im-
ages are generally divided into two categories, the
traditional approaches and the machine learning tech-
niques (Cheng and Han, 2016). In traditional ap-
proaches, the feature extraction is one important step
in object detection, which consists of the use of tex-
ture, shape, color, and spatial information. The work
presented by Kembhavi et al. relies on three features,
histogram of oriented gradient (HoG), color probabil-
ity maps (CPM) and pairs of pixels (PoP), to solve the
regression problem using partial least squares (PLS)
(Kembhavi et al., 2011). Lenhart et al. use the dif-
ference in color channels to detect vehicles with more
significant color features and the grayscale images to
extract the blob-like spots (Lenhart et al., 2008). In
(Shao et al., 2012), a vehicle detection framework
which combines different features including HoG and
local binary patterns (LBP) is proposed. Furthermore,
Li, C. and Lin, H.
Vehicle Detection and Classification in Aerial Images using Convolutional Neural Networks.
DOI: 10.5220/0008941707750782
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
775-782
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
775
many traditional techniques such as frame difference
and optical flow (Yalcin et al., 2005) are used to detect
moving vehicles.
In recent years, the convolutional neural networks
(CNNs) have achieved good results in target detec-
tion and classification. Among them, Tang et al. use
DLR Vehicle Aerial dataset and Vehicle Detection
in Aerial Imagery (VEDAI) dataset to train the Sin-
gle Shot MultiBox Detector (SSD) (Liu et al., 2016),
and adopt the model as the backbone to perform net-
work tuning (Tang et al., 2017). Sommer et al. eval-
uate the performance comparison between Fast R-
CNN (Girshick, 2015) and Faster R-CNN (Ren et al.,
2017) network architectures using public aerial im-
age datasets (Sommer et al., 2017). Deng et al. pro-
pose a fast vehicle detection system based on R-CNN.
It combines AVPN (Accurate Vehicle Proposal Net-
work) and VALN (Vehicle Attributes Learning Net-
work), and provides the results superior to Fast R-
CNN (Deng et al., 2017). Lu et al. analyze the differ-
ences among YOLO (Redmon et al., 2016), YOLOv2
(Redmon and Farhadi, 2017) and YOLOv3 (Redmon
and Farhadi, 2018) networks for vehicle detection us-
ing VEDAI, COWC and DOTA datasets (Xia et al.,
2018) for training and testing (Lu et al., 2018). Sim-
ilarly, Benjdira et al. present a small public vehicle
dataset to compare the pros and cons of Faster R-CNN
and YOLOv3 for vehicle detection (Benjdira et al.,
2019).
Compared to the general object detection and
recognition research and applications, the datasets for
vehicle detection in aerial imagery are fairly limited.
The VEDAI dataset used in this work is made avail-
able by Razakarivony and Jurie (Razakarivony and
Jurie, 2016), and originated from the public Utah
AGRC database. VEDAI contains a total of 1,250 im-
ages, and is manually annotated with nine classes of
objects (plane, boat, camping car, car, pickup truck,
tractor, truck, van, and others) and a total of 2,950
samples. The annotation of each sample includes
the sample class, the center point coordinates, di-
rection and the four corner point coordinates of the
groundtruth. However, the targets in VEDAI are
relatively easy to identify. Most of the vehicles in
the images are sparsely distributed with simple back-
grounds, and the vehicles in the densely distributed
places such as parking lots are excluded.
Compared to the object detection in ground view
images, vehicle detection in aerial images has several
challenges. The targets are usually much smaller with
monotonic appearance, and easily affected by the il-
lumination changes. In this paper, we propose a tech-
nique for vehicle detection and classification in aerial
images based on a modified Faster R-CNN frame-
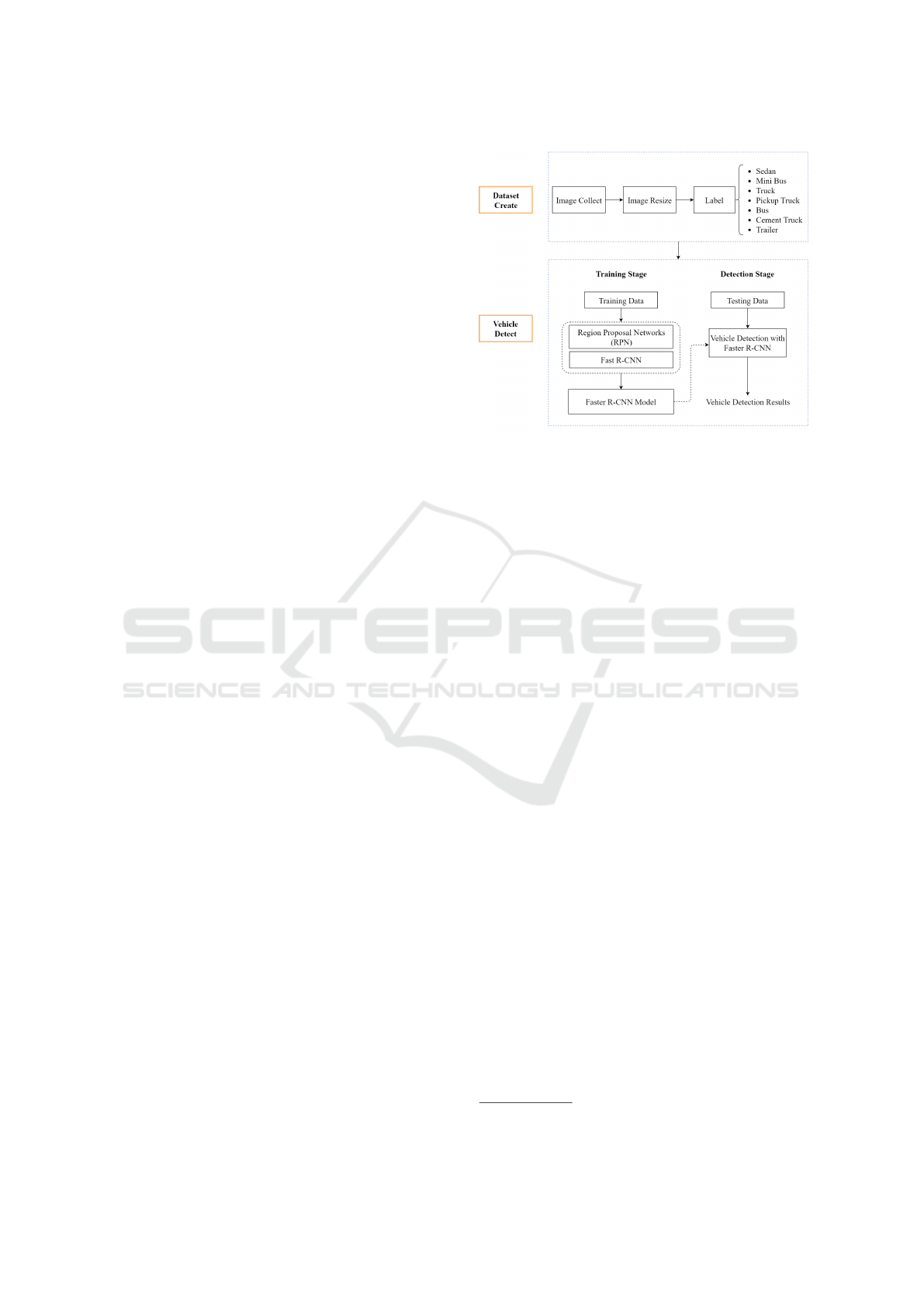
Figure 1: A schematic diagram of the proposed method for
vehicle detection and classification in aerial images. It con-
sists of the creation of our own aerial image dataset and the
development of network architecture for vehicle detection.
work. We compare the advantages, disadvantages
and results of vehicle detection in aerial images with
widely used network architectures. A new aerial im-
age dataset for vehicle detection is introduced with the
annotation of 7 common vehicle categories including
sedan, minibus, truck, pickup truck, bus, cement truck
and trailer. Figure 1 shows the schematic diagram of
the proposed method for vehicle detection and classi-
fication in aerial images. It consists of the creation of
our own aerial image dataset and the development of
network architecture for vehicle detection.
2 VAID DATASET
As mentioned previously, there are not many public
datasets available specifically for vehicle detection in
aerial images. Even for the existing datasets, only
a very limited number of places and traffic scenes
are covered. Several popular datasets for vehicle
detection in aerial images include VEDIA, COWC,
DLR-MVDA and KIT AIS. The description of these
datasets are shown in Table 1. This paper introduces a
new vehicle detection dataset, VAID (Vehicle Aerial
Imaging from Drone), with the aerial images captured
by a drone.
1
We collect about 6,000 aerial images
under different illumination conditions, viewing an-
gles from different places in Taiwan. The images are
taken with the resolution of 1137 × 640 pixels in JPG
format. Our VAID dataset contains seven classes of
vehicles, namely ‘sedan’, ‘minibus’, ‘truck’, ‘pickup
truck’, ‘bus’, ‘cement truck’ and ‘trailer’. Figure 2
1
VAID Dataset: http://vision.ee.ccu.edu.tw/aerialimage/
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
776

Table 1: Summary of the existing datasets for vehicle detection in aerial images.
Database Image Image Size Resolution Vehicle Size
VEDIA 1250
512 × 512
1024 × 1024
25cm
12.5cm
10 × 20
20 × 40
COWC 53 2000 × 2000, 19000 × 19000 15cm 24 × 48
DLR-MVDA 20 5616 × 3744 13cm 20 × 40
KIT AIS Dataset 241 300-1800 12.5cm-18cm 15 × 25, 20 × 40
Figure 2: The common vehicles are classified to 7 categories, namely (a) sedan, (b) minibus, (c) truck, (d) pickup truck, (e)
bus, (f) cement truck and (g) trailer, from the left to the right. The sample images are shown in the figure.
shows several cropped vehicle images from different
categories.
Although the vehicles are divided into the above
seven categories according to the popularity in Tai-
wan’s road scenes, it is sometimes very tricky to anno-
tate. The characteristics of small sedans viewing from
the above are less obvious, and the types are more di-
verse, including two-door and four-door sedans, five-
door hatchbacks, recreational vehicles and nine-seat
vans. There are a few differences in the definition of a
truck and a pickup truck for annotation. A truck is de-
fined as a vehicle with a shelter in the cargo area or a
vehicle with its own cargo area as a container, and the
body and the front of the vehicle are completely dis-
connected. However, a pickup truck is not covered by
the canopy. A minibus is a 21-seat medium size bus,
while a bus includes passenger and big buses. The
trailer category includes tank trucks, gravel trucks,
tow trucks, container trucks with detachable tailgates.
The images in the dataset are annotated using the la-
beling tool LabelImg in the format of PASCAL VOC,
including the names of the classes and the bounding
box coordinates.
The images in the dataset are taken by a drone
(DJI’s Mavic Pro). To keep the sizes of the vehicles
consistent in all images, the altitude of the drone is
maintained at about 90 – 95 meters from the ground
during video recording. The output resolution is
2720 × 1530 at 2.7K and the frame rate is about 23.98
fps. For an average sedan with the length of 5 meters
and the width of 2.6 meters, the apparent size in the
image is about 110 × 45 pixels. In the VAID dataset,
the images are scaled to the resolution of 1137× 640,
and a sedan in the images is about the size of 40 × 20
pixels.
The dataset covers ten geographic locations in
southern Taiwan, and contains various traffic and road
conditions. The images are taken on the sunny days
when the light is sufficient, the interference caused
by the shadow of the house in the afternoon, and the
darker imaging condition in the evening. Figure 3
shows some of the dataset images with various road
and traffic scenes.
3 PROPOSED FRAMEWORK
An overview of the proposed framework is illustrated
in Figure 4. It is modified based on Faster R-CNN
(Ren et al., 2017) and uses ResNet as the backbone
structure for feature learning. This provides high effi-
ciency, robustness and effectiveness during training.
3.1 Feature Learning
In the original Faster R-CNN architecture, the authors
use VGG16 and ZF Net as the feature extraction net-
works. There exist many network architectures, such
as AlexNet, ResNet, and Inception, which also pro-
vide good results in feature extraction. ResNet is
one popular feature extraction network. On the eval-
uation using PASCAL VOC 2007, the mAP is in-
creased from 73.2% to 76.4% if VGG16 is replaced
by ResNet101. The mAP is also increased from
70.4% to 73.8% on PASCAL VOC 2012. The ex-
periments in (Ren et al., 2018) show that, among the
feature extraction networks for Faster R-CNN, the re-
sults obtained by ResNet50 are better than VGG and
Inception.
3.2 Region Proposal Network
In the feature extraction process of Faster R-CNN, the
RPN shares the convolutional layers, which can re-
duce a large amount of cost compared to the selective
search method. When using the sliding window, the
RPN generates multiple anchor boxes for matching,
Vehicle Detection and Classification in Aerial Images using Convolutional Neural Networks
777

Figure 3: Some aerial images in our VAID dataset captured using a drone. It consists of different road and traffic scenes.
Figure 4: The proposed modified Faster R-CNN architecture for vehicle detection and classification.
which are used to effectively predict the aspect ratio
and scale settings of larger objects in PASCAL VOC.
Compared to the general object detection, the vehicles
in aerial images are clearly smaller than the common
objects of interest. Thus, if the original magnifica-
tion of the anchor box is used, the target might be too
small to be detected.
In the original implementation, the anchor boxes
are built on multiple scales and aspect ratios. The
three aspect ratios used are 0.5, 1 and 2, and the three
bounding box scales are 128
2
, 256
2
and 512
2
. The as-
pect ratios are changed to [0.2, 0.5, 1, 1.2, 2] to handle
to the small target size problem while maintaining the
recognition rate of large vehicles.
In the early work, the most commonly used acti-
vation function for DNN is the sigmoid function. To
solve the deficiencies of the sigmoid function, Recti-
fied Linear Unit (ReLU) is increasingly used recently.
It is able to converge faster, and the computation is
less. The vanishing gradient problem can be effec-
tively solved with the observation whether the input
is greater than zero. ReLU gives part of the output
zero, which makes the neural network sparse and re-
duces the overfitting problem. Faster R-CNN has two
activation functions in the RPN, one for the classifi-
cation and the other for the bounding box prediction.
In the experiments, it is found that the accuracy can
be improved if the activation function of the classifi-
cation prediction is changed.
4 EXPERIMENTAL RESULTS
In the experiments, we introduce the VAID dataset
presented in this paper, and compare it with the exist-
ing aerial image datasets on the processes and results
of network training for vehicle detection and classifi-
cation.
4.1 Dataset Comparison
We evaluate our method on the public VEDAI dataset
and our VAID dataset, and test with the aerial images
acquired from different places. The VEDAI dataset
is the most common dataset for vehicle detection in
aerial image. To focus on the targets for vehicle de-
tection, the training data of the VEDAI dataset are
processed as follows. (a) The objects in the cate-
gories with the labels ‘Boat’, ‘Plane’ and ‘Others’
are removed. (b) The remaining vehicles are labeled
by their types to two categories. The first category
contains the general cars, which is labeled as ‘Car’
in the original dataset. The second category consists
of the combination of other types of vehicles which
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
778

(a) Scene A: A sedan is about 20 × 40 pixels. (b) Scene B: A sedan is about 10 × 20 pixels.
(c) Scene C: A sedan is about 20 × 45 pixels. (d) Scene D: A sedan is about 40 × 80 pixels.
Figure 5: The image data used for testing. (a) Scene A consists of the images recorded from two locations in a city. (b) Scene
B contains a YouTube video recorded with a highway. (c) Scene C contains a YouTube video recorded with an expressway.
(d) Scene D is a YouTube video recorded with a crossroad in Belarus.
includes ‘Camping Car’, ‘Pickup Truck’, ‘Tractor’,
‘Truck’ and ‘Van’.
To compare with the VEDAI dataset, the origi-
nal seven vehicle categories in our dataset are also
adjusted to two categories. The first category is the
general car, which is the vehicle classification of the
original label ‘Sedan’, and the second category is the
other six original categories of vehicles labeled as
‘Minibus’, ‘Truck’, ‘Pickup Truck’, ‘Bus’, ‘Cement
truck’ and ‘Trailer’. Our testing data are selected
from four different scenes and image acquisition sce-
narios. Scene A consists of the self-recorded aerial
images from two locations in a city. Scenes B – D
are the videos obtained from YouTube, which record
two highways and one expressway in Taiwan, and a
crossroad in Belarus. The details of the testing data
are shown in Figure 5 and tabulated in Table 2.
Table 3 and Figure 6 show the comparison results
of using VEDAI and VAID as the training datasets. In
the four different scenarios, training with the VEDAI
dataset is worse than using our VAID dataset, espe-
cially for Scenes A and D in the testing environment.
In VEDAI images, the vehicle only occupies a small
region, so the classification error is high when the ve-
hicle size is relatively large in the testing images such
as Scene D. Scenes A – C are the road data acquired
in Taiwan, and the vehicles such as trucks and trail-
ers are rare in the VEDAI dataset. This also causes
the classification problem for certain types of vehi-
cles. Using our VAID dataset for training, high accu-
racy results are obtained for Scenes A, C and D. Es-
pecially, note that Scene D is the road data acquired
in Belarus with the captured vehicle size larger than
those in our training set. The low precision results of
Scene B are mainly caused by the vehicle size in the
scene (about 20 × 10) much smaller compared to the
size of about 40 × 20 used for training.
4.2 Detection and Classification
Comparison
In our VAID dataset, there are totally 5,937 aerial im-
ages with vehicles classified into 7 categories. It in-
cludes 4,456 images for training, 502 images for ver-
ification, and 979 images for testing. The detailed in-
formation of each class and the number of images for
training, validation and testing are shown in Table 4.
It can be seen that the number of training samples is
not balanced for different classes, so it is very impor-
tant to achieve better results with fewer samples when
training the classification network.
To test the effect of different activation func-
tions, we evaluate the network using softplus, ELU
and ReLU, and the results are tabulated in Table
5. Among these activation functions, softplus is the
worst, while ELU and ReLU converge faster than the
original architecture and the mAP is also improved by
about 0.4%. Thus, ReLU is adopted as the activation
function of RPN for Faster R-CNN classification.
In this paper, Faster R-CNN with ResNet101 as
Vehicle Detection and Classification in Aerial Images using Convolutional Neural Networks
779
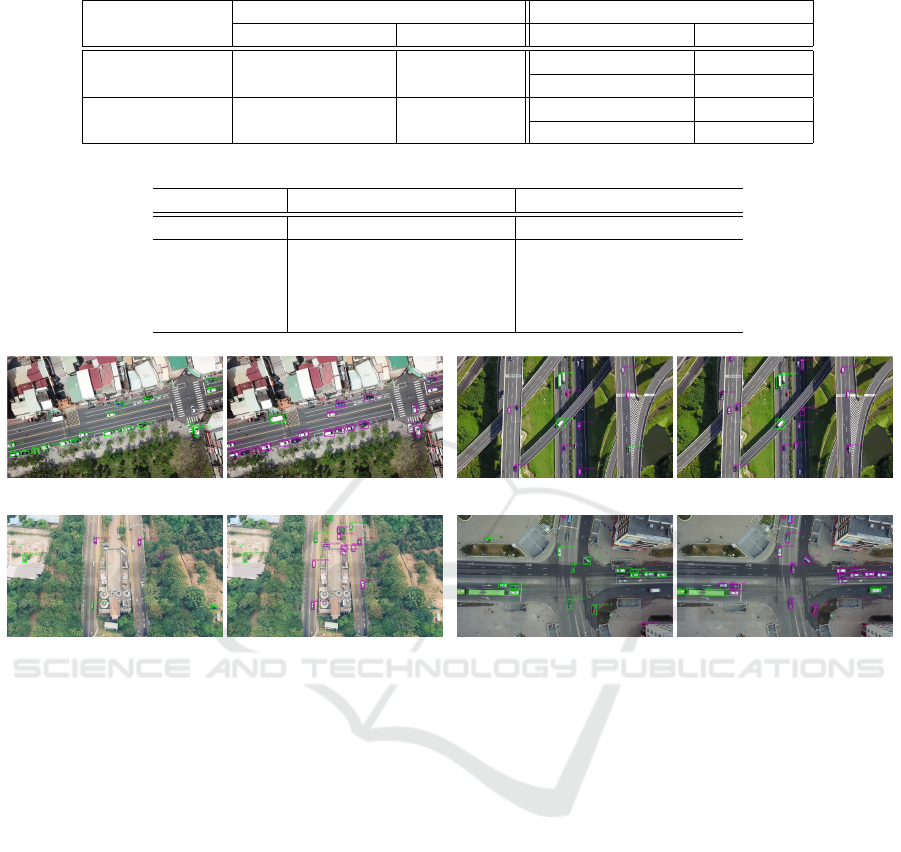
Table 2: The description of the training and testing sets.
Training Set Testing Set
Number of image Image size Number of image Image size
VEDAI Dataset 1211 1024 × 1024
A: 99 1137×640
B. 17 1280 ×720
VAID Dataset 4456 1137×640
C: 31 1280×720
D: 35 1920×1080
Table 3: The result comparison (mAP) of using the VEDAI dataset and our VAID dataset for network training.
Training Data VEDAI Dataset VAID Dataset
Class Sedan Others mAP Sedan Others mAP
A 18.8% 0% 9.5% 90.4% 62.6% 76.5%
B 59.4% 35.8% 45.4% 73% 55.2% 64.1%
C 31.1% 23.3% 27.2% 89.1% 86.8% 87.9%
D 12.6% 0% 6.7% 89.1% 90.7% 89.9%
(a) Scene A (b) Scene B
(c) Scene C (d) Scene D
Figure 6: The results of Scenes A – D using the proposed vehicle detection approach. Left: Training with the VEDAI dataset.
Right: Training with our VAID dataset.
the feature extraction network is modified. It includes
the data enhancement of the training images, the ad-
justment of the anchor box size, the change of the
test image input size, and the modification of the
ResNet101 activation function. Table 6 shows the
results of the original Faster R-CNN, our modified
Faster R-CNN, and the modification with the ReLU
activation function for RPN. Using the same train-
ing data, the improvement with the pre-adjustment is
about 1.5% in mAP, and the result of each category
is also slightly improved. Figure 7 shows the vehicle
detection and classification results in various common
road scenes in Taiwan. The bounding boxes with dif-
ferent colors are used to represent different types of
vehicles. Successful detection and classification with
all kinds of vehicles are shown in the figures.
5 CONCLUSIONS
In this paper, we propose a technique for vehicle de-
tection and classification from aerial images based on
the modification of Faster R-CNN framework. A new
dataset with images collected from a drone is further
introduced for vehicle detection and available for pub-
lic access. We compare the results of vehicle detec-
tion in aerial images with widely used network ar-
chitectures and training datasets. The experiments
demonstrate that the proposed method and dataset can
achieve high vehicle detection and classification rates
under various road and traffic conditions. In the future
work, the vehicle detection will be incorporated with
traffic management system for parking lot and traffic
flow monitoring.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
780
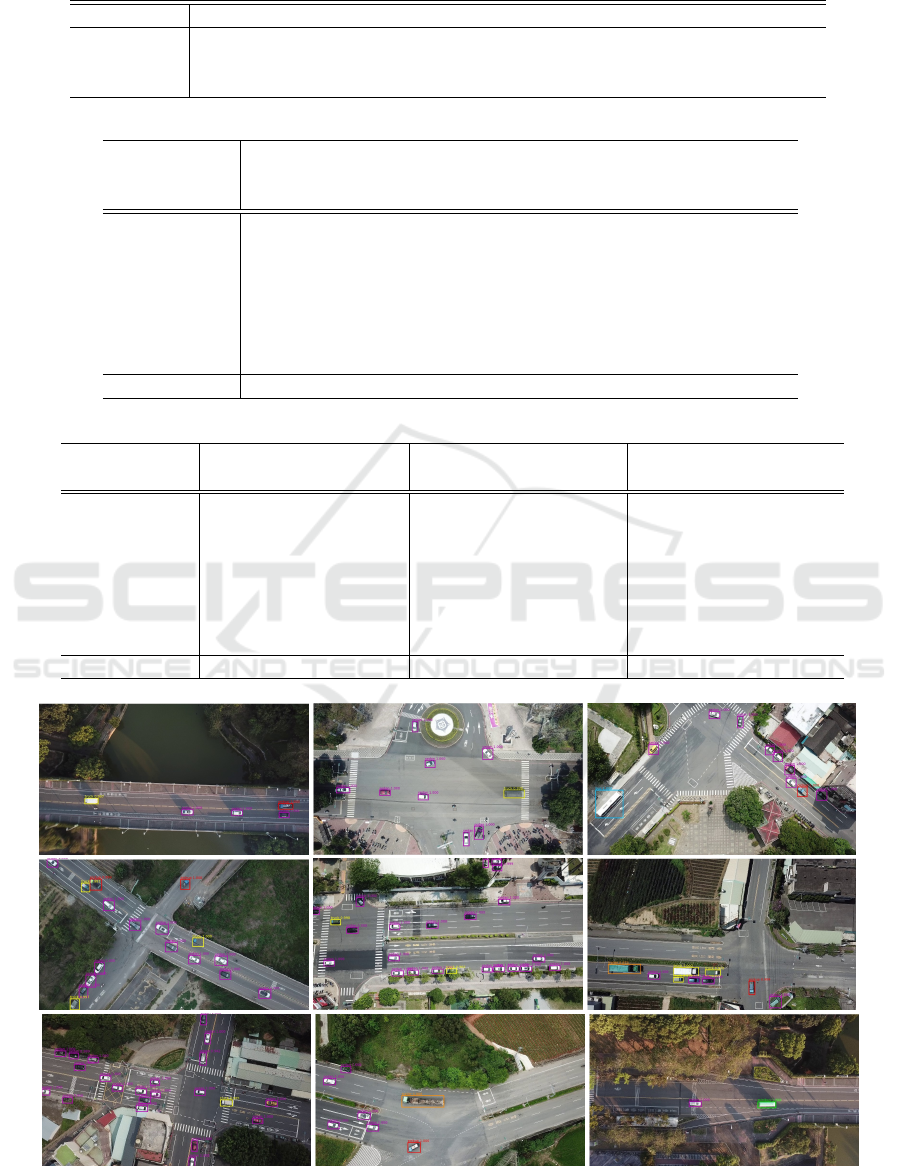
Table 4: The detailed information of each class and the number of images used for training, validation and testing.
Class Name Sedan Minibus Truck Pickup Truck Bus Cement Truck Trailer
Training 29774 392 2382 2411 447 144 595
Validation 3483 39 267 266 49 21 62
Testing 6774 70 531 322 84 22 56
Table 5: Different activation functions are used in Faster R-CNN for comparison (mAP).
Modified
Faster R-CNN
Modified
Faster R-CNN
(softplus)
Modified
Faster R-CNN
(ELU)
Modified
Faster R-CNN
(ReLU)
Sedan 90.2% 90.2% 90.2% 90.2%
Minibus 97.9% 92.2% 96.6% 95.6%
Truck 84.9% 87.5% 87.1% 86.8%
Pickup Truck 78.7% 79.3% 78.6% 79.6%
Bus 89.4% 89.6% 89.8% 90.3%
Cement Truck 97.6% 93.8% 97.6% 98.1%
Trailer 83.8% 81.5% 84.7% 84.5%
Avg. 88.9% 87.7% 89.2% 89.3%
Table 6: The results from our modified Faster R-CNN (mAP).
Original Faster R-CNN Modified Faster R-CNN
Modified Faster R-CNN
(ReLU)
Sedan 90.0% 90.2% 90.2%
Minibus 95.0% 97.9% 95.6%
Truck 83.4% 84.9% 86.8%
Pickup Truck 76.8% 78.7% 79.6%
Bus 88.9% 89.4% 90.3%
Cement Truck 94.2% 97.6% 98.1%
Trailer 85.6% 83.8% 84.5%
Avg. 87.7% 88.9% 89.3%
Figure 7: The results from our dataset and the modified Faster R-CNN with ReLU.
Vehicle Detection and Classification in Aerial Images using Convolutional Neural Networks
781

ACKNOWLEDGMENTS
The support of this work in part by the Ministry
of Science and Technology of Taiwan under Grant
MOST 106-2221-E-194-004 and the Advanced In-
stitute of Manufacturing with High-tech Innovations
(AIM-HI) from The Featured Areas Research Cen-
ter Program within the framework of the Higher Ed-
ucation Sprout Project by the Ministry of Education
(MOE) in Taiwan is gratefully acknowledged.
REFERENCES
Benjdira, B., Khursheed, T., Koubaa, A., Ammar, A., and
Ouni, K. (2019). Car Detection using Unmanned
Aerial Vehicles: Comparison between Faster R-CNN
and YOLOv3Benjdira, B., Khursheed, T., Koubaa,
A., Ammar, A., &Ouni, K. (2019). Car Detection
using Unmanned Aerial Vehicles: Comparison be-
tween Faster R-CNN and YOLOv3. 2019 1s. In 2019
1st International Conference on Unmanned Vehicle
Systems-Oman, UVS 2019.
Cheng, G. and Han, J. (2016). A survey on object detection
in optical remote sensing images.
Deng, Z., Sun, H., Zhou, S., Zhao, J., and Zou, H. (2017).
Toward Fast and Accurate Vehicle Detection in Aerial
Images Using Coupled Region-Based Convolutional
Neural Networks. IEEE Journal of Selected Topics in
Applied Earth Observations and Remote Sensing.
Girshick, R. (2015). Fast R-CNN. In Proceedings of the
IEEE International Conference on Computer Vision.
Kembhavi, A., Harwood, D., and Davis, L. S. (2011). Vehi-
cle Detection using Partial Least Squares. IEEE Trans.
Pattern Analysis and Machine Intelligence (PAMI),
33(6):1250–1265.
Lenhart, D., Hinz, S., Leitloff, J., and Stilla, U. (2008). Au-
tomatic traffic monitoring based on aerial image se-
quences. Pattern Recognition and Image Analysis.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C. Y., and Berg, A. C. (2016). SSD: Single shot
multibox detector. In Lecture Notes in Computer Sci-
ence (including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics).
Lu, J., Ma, C., Li, L., Xing, X., Zhang, Y., Wang, Z., and
Xu, J. (2018). A Vehicle Detection Method for Aerial
Image Based on YOLO. Journal of Computer and
Communications.
Razakarivony, S. and Jurie, F. (2016). Vehicle detection in
aerial imagery: A small target detection benchmark.
Journal of Visual Communication and Image Repre-
sentation.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition.
Redmon, J. and Farhadi, A. (2017). YOLO9000: Better,
faster, stronger. In Proceedings - 30th IEEE Con-
ference on Computer Vision and Pattern Recognition,
CVPR 2017.
Redmon, J. and Farhadi, A. (2018). YOLO v.3. Tech report.
Ren, S., He, K., Girshick, R., and Sun, J. (2017). Faster R-
CNN: Towards Real-Time Object Detection with Re-
gion Proposal Networks. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence.
Ren, Y., Zhu, C., and Xiao, S. (2018). Object Detection
Based on Fast/Faster RCNN Employing Fully Con-
volutional Architectures. Mathematical Problems in
Engineering.
Shao, W., Yang, W., Liu, G., and Liu, J. (2012). Car detec-
tion from high-resolution aerial imagery using multi-
ple features. In International Geoscience and Remote
Sensing Symposium (IGARSS).
Sommer, L. W., Schuchert, T., and Beyerer, J. (2017). Fast
deep vehicle detection in aerial images. In Proceed-
ings - 2017 IEEE Winter Conference on Applications
of Computer Vision, WACV 2017.
Tang, T., Zhou, S., Deng, Z., Lei, L., and Zou, H. (2017).
Arbitrary-oriented vehicle detection in aerial imagery
with single convolutional neural networks. Remote
Sensing.
Xia, G. S., Bai, X., Ding, J., Zhu, Z., Belongie, S., Luo, J.,
Datcu, M., Pelillo, M., and Zhang, L. (2018). DOTA:
A Large-Scale Dataset for Object Detection in Aerial
Images. In Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion.
Yalcin, H., Hebert, M., Collins, R., and Black, M. J. (2005).
A flow-based approach to vehicle detection and back-
ground mosaicking in airborne video. In Proceedings
- 2005 IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition, CVPR 2005.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
782
