
A Hierarchical Approach for Indoor Action Recognition from New
Infrared Sensor Preserving Anonymity
F
´
elix Polla
1
, H
´
el
`
ene Laurent
2
and Bruno Emile
1
1
University of Orleans, Prisme Laboratory EA 4229, Orl
´
eans, France
2
INSA CVL, University of Orleans, Prisme Laboratory EA 4229, Bourges, France
Keywords:
Low Resolution Infrared Sensor, Motion History Image (MHI), Feature Selection, Action Recognition.
Abstract:
This article is made in the context of action recognition from infrared video footage for indoor installations.
The sensor we use has some peculiarities that make the acquired images very different from those of the
visible imagery. It is developed within the CoCAPS project in which our work takes place. In this context,
we propose a hierarchical model that takes an image set as input, segments it, constructs the corresponding
motion history image (MHI), extracts and selects characteristics that are then used by three classifiers for
activity recognition purposes. The proposed model presents promising results, notably compared to other
models extracted from deep learning literature. The dataset, designed for the CoCAPS project in collaboration
with industrial partners, targets office situations. Seven action classes are concerned, namely: no action,
restlessness, sitting down, standing up, turning on a seat, slow walking, fast walking.
1 INTRODUCTION
In recent years, automatic recognition of human ac-
tivities has attracted a lot of attention in the field
of computer vision. Action recognition can be used
for analyzing the behavior of people or for monitor-
ing living and workplace environments (Jalal et al.,
2017; Laptev et al., 2008). Despite impressive perfor-
mances, the main pitfall faced by the techniques de-
veloped for home automation is a marked restraint of
the users to be filmed. This led to feasibilty studies for
human activity recognition through unobtrusive sen-
sors such as pyroelectric infrared sensors (Luo et al.,
2017), bluetooth low-energy beacons (Filippoupoli-
tis et al., 2017) or acceleration sensors incorporated
in smartphones or smartwatches (Sefen et al., 2016).
To cope with the problems of personal identity re-
vealed in operation, one of the objectives of the Co-
CAPS project is to consider the feasibility of action
recognition using images coming from a low resolu-
tion (64 ×64 pixels) infrared sensor which guarantees
the respect of the intimacy of the person. The sen-
sor developed by Irlynx
1
within the project is a pro-
totype able to return images of moving objects in a
room. The technology is based on the principle of py-
roelectric detection, that is to say, the detection of dis-
1
www.irlynx.com
placement of a hot body present in the monitored vol-
ume. It allows to observe bright or low-light scenes
that would be otherwise difficult to monitor. This type
of sensor, up-and-coming, is not yet completely mas-
tered. The main disadvantage is that the provided im-
ages present a very noisy aspect, which brings up a
problem of image quality (see Figure 1). Arranged in
the ceiling upon request from building industrialists,
we have then to face two difficulties: the considered
sensor provides unusual data and unusual field of vi-
sion, so that no public database nor work dealing with
this problem are available.
In this article, we detail the database constructed
for the CoCAPS project, the proposed hierarchical ap-
proach for action recognition and its performances
that achieve competitiveness with models extracted
from deep learning literature.
2 DATA REPRESENTATION AND
FEATURE EXTRACTION
Activity recognition often breaks down into three
main phases: segmentation, data representation and
feature extraction, and finally classification. Repre-
sentation and feature extraction have crucial influence
on the performance of recognition, therefore it is es-
Polla, F., Laurent, H. and Emile, B.
A Hierarchical Approach for Indoor Action Recognition from New Infrared Sensor Preserving Anonymity.
DOI: 10.5220/0008942002290236
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
229-236
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
229

Figure 1: The first row presents images with visible camera respectively without and with the presence of a moving person in
the scene; the second row presents the corresponding images from the infrared sensor.
sential to extract or represent features of image frames
in a proper way. In this article, we describe some ap-
proaches used to represent a video sequence in order
to combine them and extract representative informa-
tion for each video.
2.1 Representation of Video Sequence
In 2D image sequences, many representations are
possible such as silhouettes (Bobick and Davis, 2001;
Gorelick et al., 2007), key pose (Liu et al., 2013), op-
tical flow (Robertson and Reid, 2005), trajectory de-
scription (Wang et al., 2013), local descriptors: SIFT
(Lowe, 2004), HOG (Dalal and Triggs, 2005).
Given the main constraints related to the used sen-
sor and its usage context which are: noisy images, no
detection on images if there is no movement of a hot
body and sensor positioning in top view, we opt for an
approach based on the silhouette. This approach im-
plies that the segmentation and post-processing step
is effective so that the subsequent processing can op-
erate. In the work carried out previously (Polla et al.,
2017), a method of segmentation and post-processing
adapted to the sensor has been proposed.
Among the silhouette-based methods, some au-
thors proposed the concept of Spatio-temporal tem-
plate (Bobick and Davis, 2001). They first segment
the images to extract the motion image, then for a set
of images, they construct the motion history image
(MHI) and the motion energy image. The MHI is a
temporal model of video representation quite simple
and widely used for the recognition of action (Ahad
et al., 2012). From this information, it is possible to
extract a large number of features.
In our approach, we use equation (1) to build the
motion history image. It allows to group consecutive
images of each video sequence according to their time
information.
MHI(x, y,t) =
max
i=
{
1,..,m
}
{
D(x, y, t −(m − i)) − 10(m − i)
}
(1)
where D(x, y,t) is the binary motion detection im-
age extracted from the segmentation step at time t,
m represents the selected time frame (m=15) and the
value 10 is a threshold for varying the grayscale in the
construction of the motion history.
2.2 Feature Extraction
In the literature, feature extraction approaches are
classified into two families, namely contour-based
methods and region-based methods (see Figure 2).
We propose a framework combining the contour-
based method and the region-based method. In this
section, we briefly present the three used descriptors.
2.2.1 Hu Moments
In this approach, central moments of any order are
computed from raw moments and standardized to
construct an invariant descriptor in translation and
in scale. Finally, to also achieve invariance to the
rotation, Hu (Hu, 1962) reformulated the above-
mentioned moments by defining 7 new measures.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
230
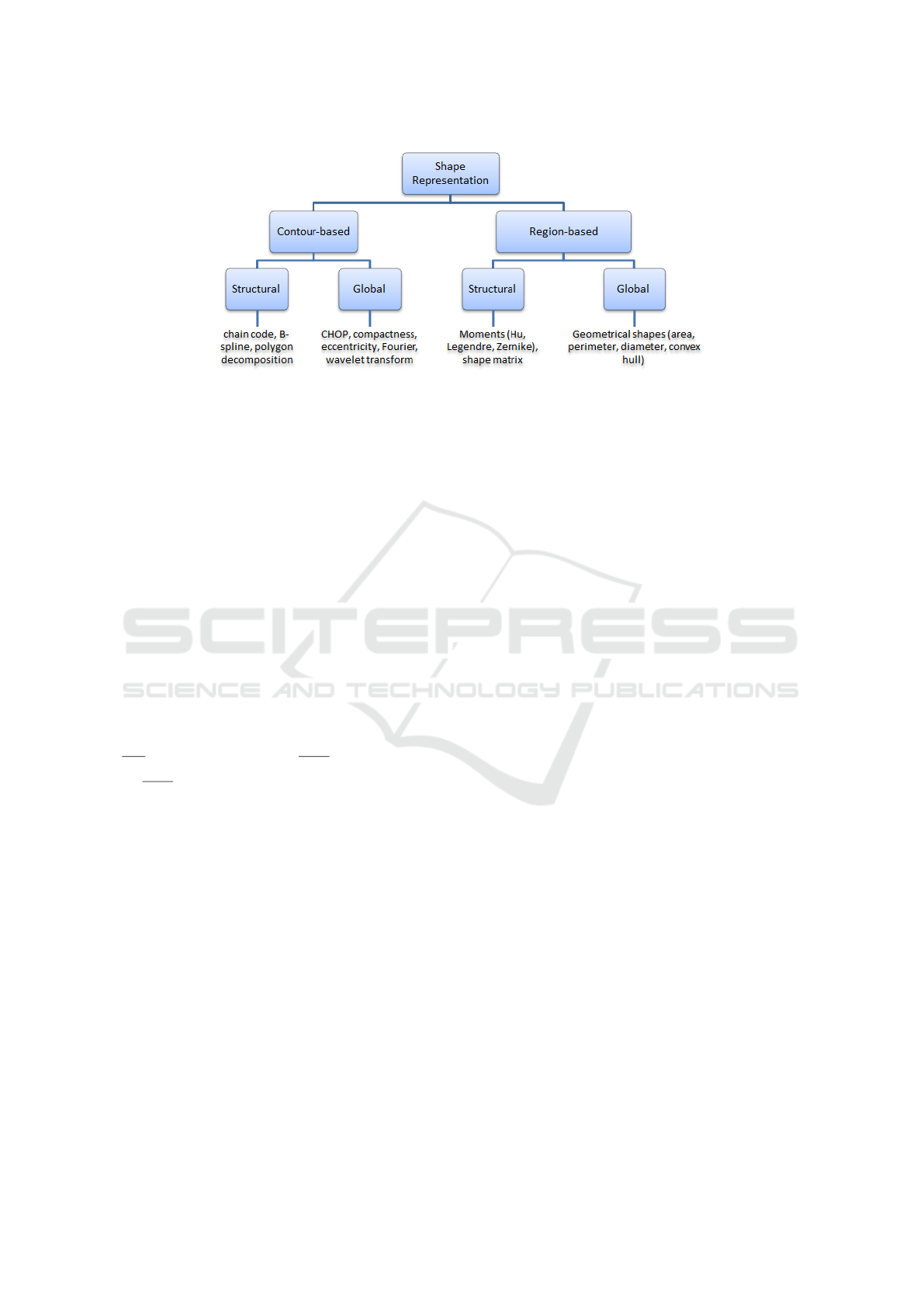
Figure 2: Numerous approaches for shape representations.
2.2.2 Color Histogram of Oriented Phase
(CHOP)
The CHOP descriptor (Ragb and Asari, 2016) can ac-
curately identify and locate image characteristics on
gradient-based techniques. The features are formed
by extracting the phase congruence information for
each pixel, convolving the image with a pair of
quadrature log-Gabor filters to extract the local fre-
quencies and phase information.
2.2.3 Geometrical Shape
Several geometric indices have been proposed in the
literature (Coster and Chermant, 1989). Some exam-
ples used for this study are : area (A), ellipse charac-
teristics (eccentricity, major axis: R
max
, minor axis:
R
min
), convex hull (C
H
), perimeter (P), circularity
(
R
min
R
max
), perimeter convexity (
P(C
H
)
P
), surface convex-
ity (
A(C
H
)
A
).
2.3 Feature Selection
On a single image, a large number of data can be ex-
tracted. This can result in the known problem of the
”dimension curse” related to classification algorithms
because considering a high number of attributes in-
creases the risk of taking into account redundant or
correlated ones which makes these algorithms more
complex (storage space and high learning time) and
sometimes less effective. In the literature, the feature
selection approaches are divided into 2 categories:
feature ranking algorithms (Biesiada et al., 2005) and
subset selection algorithms (Yu and Liu, 2003; Hall,
1999). In this article we use 3 methods of feature se-
lection from the literature to find the more adapted
one for the considered situation.
CFS (Correlation-based Feature Selection) (Hall,
1999) is an algorithm that classifies subsets of enti-
ties according to a heuristic evaluation function based
on correlation. The bias of the evaluation function is
oriented towards subsets containing entities strongly
correlated with the class and having low correlation
between them. Non-relevant entities should be ig-
nored as they have a low correlation with the class.
Redundant features must be hidden because they will
be highly correlated with one or more of the remain-
ing features.
ILFS (Infinite Latent Feature Selection) (Roffo
et al., 2017) is a robust probabilistic feature selection
algorithm based on a probabilistic latent graph that
performs the ranking step while considering all pos-
sible subsets of features, such as paths on the graph.
The relevance of an attribute is modeled as a latent
variable in a PLSA-inspired generation process (Hof-
mann, 1999) that allows the importance of a charac-
teristic to be studied when it is added to a set of at-
tributes.
MRMR (Minimum Redundancy and Maximum
Relevance) (Peng et al., 2005) is a feature selection
method that allows to select features that are mutually
distant from each other while having a high correla-
tion with the classification variable. A comparative
study on measures to assess the best redundancy and
relevance was presented in (Auffarth et al., 2010).
3 OVERVIEW OF THE
PROPOSED METHOD
For the CoCAPS project, several case studies have
been targeted for action recognition. One of which
relates to office environments, another one to insti-
tutions for older people. In these contexts manufac-
turers are interested in various scenarios that lead to
A Hierarchical Approach for Indoor Action Recognition from New Infrared Sensor Preserving Anonymity
231
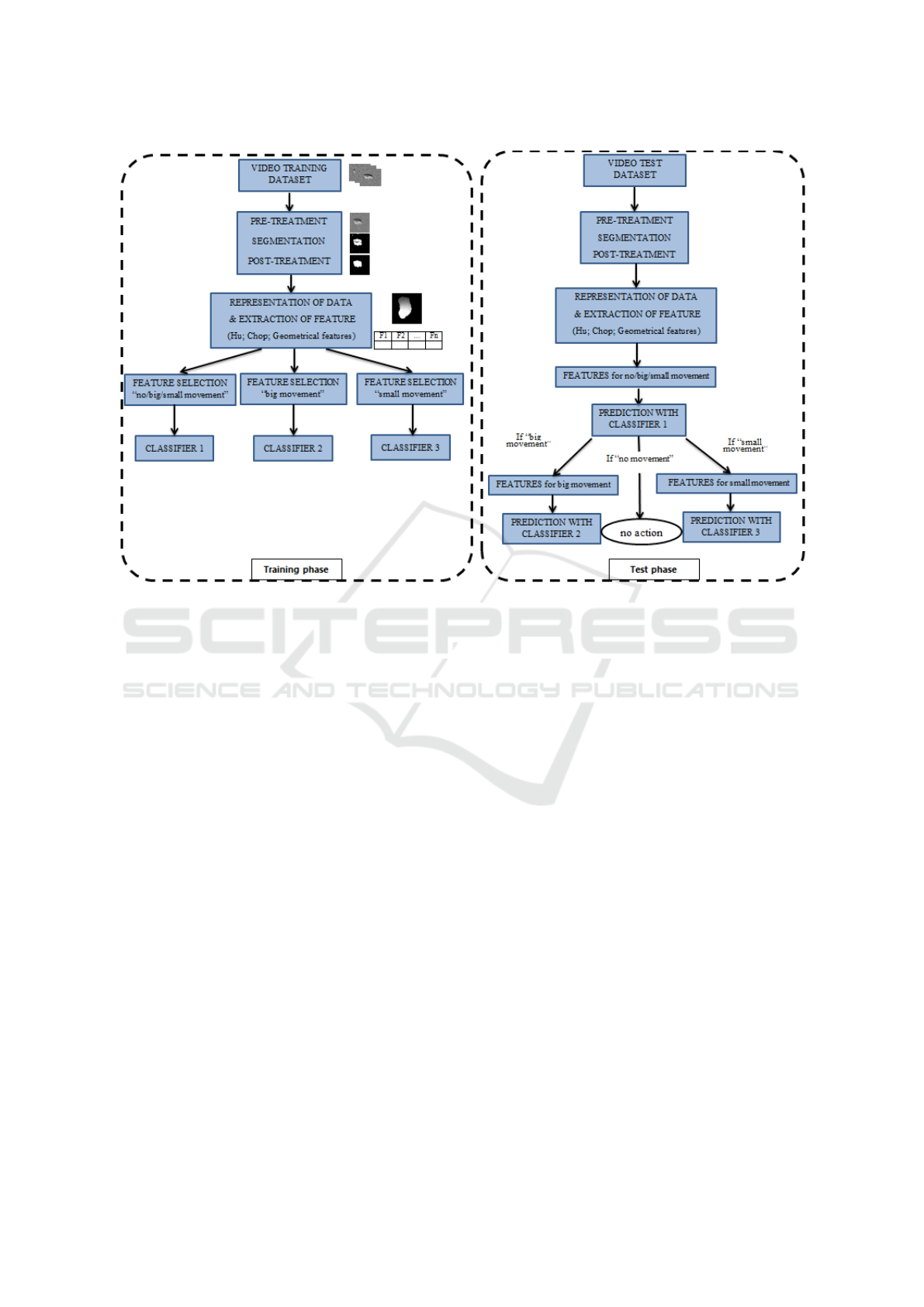
Figure 3: Overview of the proposed approach.
the definition of fast walk / slow walk, big and small
movements.
A movement is considered to be a big movement
if there is a displacement of the center of gravity of
the person and is considered as a small movement in
the opposite case. Then in each group we find sev-
eral actions. For example, in big movement we have
fast walk (> 1 meter/second) and slow walk (< 1 me-
ter/second). In small movement we have actions like:
to sit down or get up, to stir (which includes for ex-
ample typing, answering the phone, browsing docu-
ments) and to turn on a seat.
We propose a hierarchical model that exploits the
Motion History Image and extracts a set of features
from the MHI including geometric shapes, Hu mo-
ments and CHOP. In our approach, we define 3 classi-
fiers: the first one to separate no movement, big move-
ment and small one, the second one to separate the
actions related to big movement and the last one for
actions related to small movement.
Figure 3 shows an overview of the method. For
each classifier, the definition of a dedicated features
set is essential to have good performance. The left
part of Figure 3 corresponds to the training phase of
the model, within which we tested different feature
sets including different combinations. During the test
phase, we do not make a selection of features, but ex-
ploit the descriptors identified as being the best.
4 EXPERIMENTATION AND
RESULTS
4.1 Dataset
We perform our experiments on the data acquired for
the CoCAPS project. The dataset shows common ac-
tions in offices. It has 7 classes of human action:
no action, restlessness, sitting, standing, turning on
a seat, slow walking (speed less than 1 meter/second)
and fast walking (speed greater than 1 meter/second).
In total, the dataset consists of 700 videos samples
(100 samples per action). The videos were taken con-
sidering various players and were collected at differ-
ent times of the year. We consider clip sizes of 15
frames (about 1.5 second) for action recognition. In
Figure 4, we present some results of the motion his-
tory image obtained for each action.
4.2 Protocol of Validation
We propose to conduct the performance study while
using KNN (k-nearest neighbors) classification which
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
232
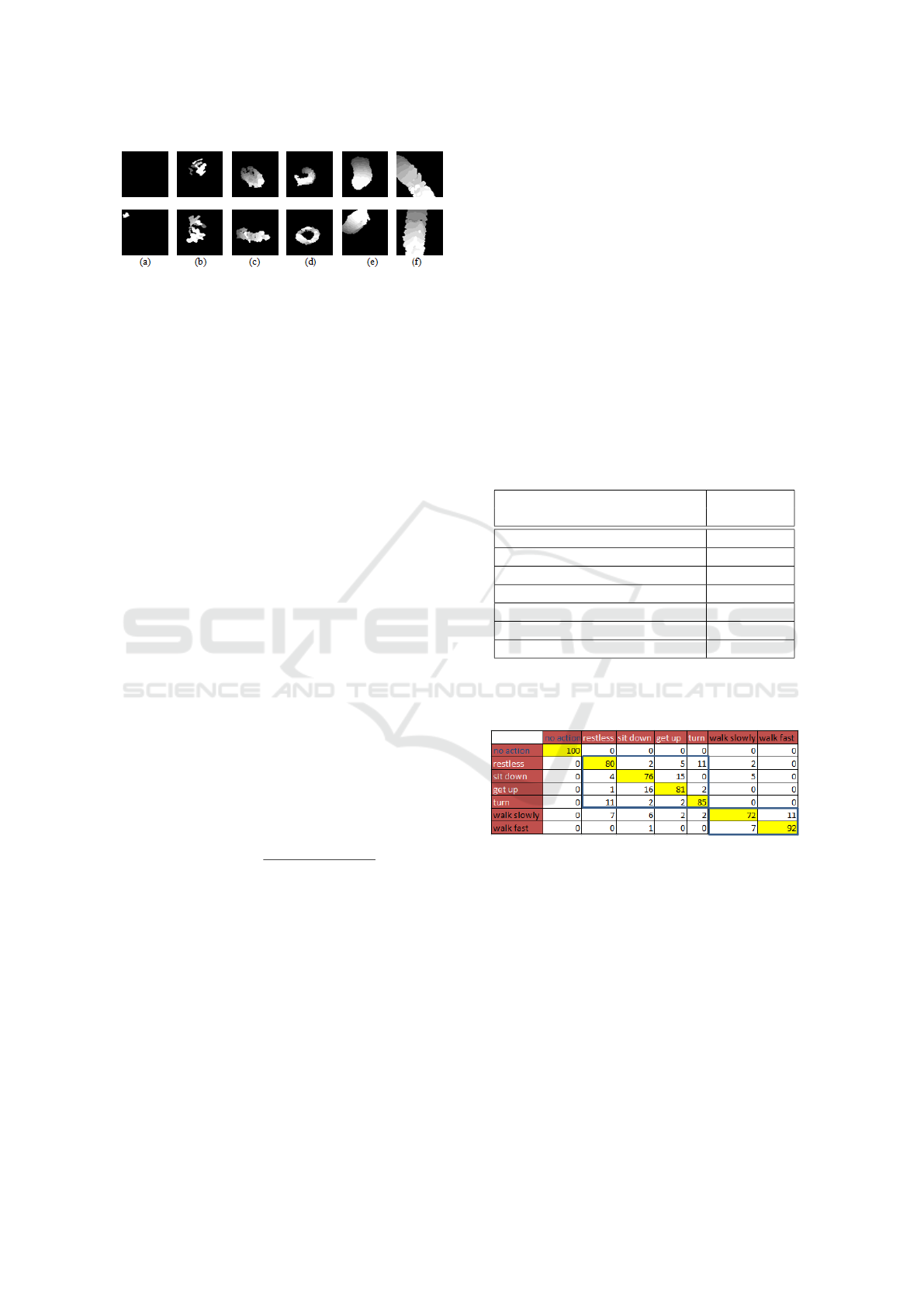
Figure 4: Example of motion history images for no action
(a), restlessness (b), sitting or standing (c), turning on seat
(d), slow walking (e) and fast walking (f).
is commonly used in machine learning. KNN is a
classification method based on the closest training
samples. To estimate the class associated with a new
input, KNN algorithm consists in taking into account
(in an identical way) the k learning samples which
are the closest to the new input, according to a dis-
tance to be defined. There are different methods for
comparing these values, like Hamming distance, Ma-
halanobis distance, Euclidean distance, etc. After var-
ious testings we used for our model the Manhattan
distance, also known as city block distance, and k=3
neighbors. The Manhattan distance is calculated by
making the sum of absolute differences between the
coordinates of a pair of objects. This distance pro-
duces results close to those obtained by the simple
Euclidean distance. However, with this measure, the
effect of only one significant difference (outlier) is at-
tenuated (Mohibullah et al., 2015).
To validate our results we use the K-fold valida-
tion (K=10) because it avoids the over-learning of the
designed model. The K-Fold or cross-validation is
a protocol in which individuals are separated into K
groups of identical sizes. The learning takes place
on K-1 groups and the validation on the withdrawn
group. This operation is repeated for all groups and
the average recognition rate is calculated. For model
accuracy measure we use the F-score (Equation (2)).
F-score = 2.
precision.recall
precision + recall
(2)
where precision is the number of true positive results
divided by the number of all positive results returned
by the classifier and recall is the number of correct
positive results divided by the number of all relevant
samples.
4.3 First Results and Interpretations
Before presenting the different results of the proposed
hierarchical model, we first present those of the sim-
pliest model (see Table 1) consisting in the raw clas-
sification into 7 classes (no action, restlessness, sit-
ting, standing, turning on a seat, slow walking and
fast walking) obtained with each type of descriptors
or each combination of descriptors. The values of the
f-scores do not exceed 83%, achieved when we just
use the CHOP descriptor as features. Table 2 shows
the confusion matrix obtained in that most favourable
case. One can note that slow walking, within big
movement, is not always appropriately recognized. It
is mainly confused with fast walking and, to a lesser
extent, with restlesness and sitting. Sitting is also con-
fused with standing and inversely. As the classes of
small and big movements are not very similar and
also because it meets the needs of industrialists, we
decided to test a hierarchical classification approach
to first differentiate between no/big/small movement
(classifier 1) and then classify within big movement
(classifier 2) and small movement (classifier 3).
Table 1: Values of F-score for a model with a raw classifi-
cation into 7 classes (single classifier).
Features
KNN
(7 classes)
Hu (7 features) 49%
Geo (9 features) 64%
CHOP (128 features) 83%
Geo+Hu (16 features) 50%
Hu+CHOP (135 features) 71%
Geo+CHOP (137 features) 65%
Geo+Hu+CHOP (144 features) 52%
Table 2: Confusion matrix with CHOP as features: F-
score=83%.
We present in Table 3, the F-score values of the
3 classifiers with all combinations of the descriptors
presented above. The first observation is that the sep-
aration of no, big and small movement (classifier 1)
is easily done by using the geometrical shape descrip-
tors or the combination of geometrical shape descrip-
tors and CHOP with 97.8% of F-score.
The results of Table 3 also show that by merg-
ing descriptors, one can increase the performance of
a classifier. This is the case of classifier 2 (big move-
ment) and classifier 3 (small movement) where the fu-
sion of CHOP and Hu moment descriptors allows to
achieve 93.5% of F-score for classifier 2 and 82.5 %
of F-score for classifier 3.
We tested the proposed hierarchical approach us-
A Hierarchical Approach for Indoor Action Recognition from New Infrared Sensor Preserving Anonymity
233
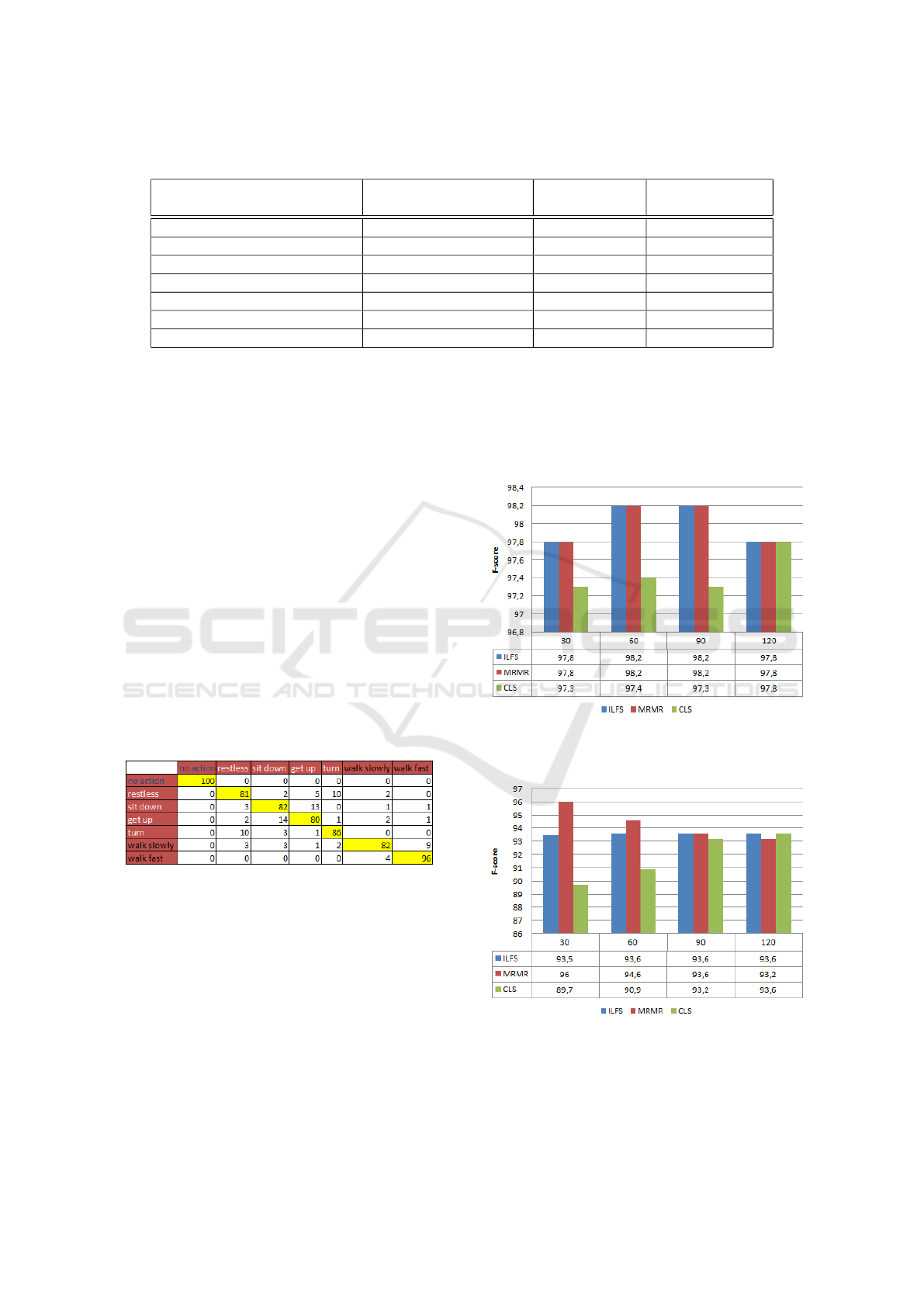
Table 3: Classification rate of 3 classifiers with KNN.
Features
no/big/small movements big movements small movements
classifier 1 classifier 2 classifier 3
Hu (7 features) 68.8% 90.5% 61%
Geo (9 features) 97.8% 86.5% 47.7%
CHOP (128 features) 97.1% 89.5% 81.5%
Geo+Hu (16 features) 84.4% 86.5% 47.7%
Hu+CHOP (135 features) 83.5% 93.5% 82.5%
Geo+CHOP (137 features) 97.8% 87% 51.5%
Geo+Hu+CHOP (144 features) 84.4% 87% 51.7%
ing each time the most relevant descriptors for build-
ing each classifier. Two approaches were identified:
• Approach 1: using geometrical shape descriptors
for classifier 1 and Hu moments + CHOP for clas-
sifier 2 and 3.
• Approach 2: using geometrical shape descriptors
+ CHOP for classifier 1 and Hu moments + CHOP
for classifiers 2 and 3.
The hierarchical approach allows to achieve a F-score
value of 86.5% for the first approach and 86.7% for
the second approach.
Table 4 presents the confusion matrix of the pro-
posed hierarchical approach 2. One can note that
the recognition rate of quite all classes has been im-
proved. The results are more uniform, especially for
small movement. However confusions remain mostly
between slow/fast walking, between sitting/standing
and between turning on a seat/restlessness.
Table 4: Confusion matrix with hierarchical approach: F-
score=86.7%.
4.4 Results of Feature Selection
While combining different types of descriptors may
improve the classification rate, having a large number
of features for the model may conversely reduce its
performance (calculation time and classification per-
centage). Ensuring a balance is necessary and the
question of the choice of relevant features has to be
dealt with. That is why we considered feature selec-
tions using three relevant methods from the literature,
and analyzed the impact of the number of features for
each method. These tests will provide the best fea-
tures to constitute the classifiers.
To separate no, big and small movements, we use
the combination of geometrical shape features and
CHOP. In Figure 5 we note that by using the first 60
descriptors provided by the ILFS and MRMR meth-
ods, the F-score value is slightly increased.
Figure 5: Results of feature selections for classifier 1: no,
big, small movements.
Figure 6: Results of feature selections for classifier 2: big
movements.
Figure 6 shows that for classifier 2, by applying
the MRMR selection method on the 135 descriptors
resulting from the combination of Hu moments and
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
234
CHOP and using only the first 30 selected features,
we can gain more than 2% of performance.
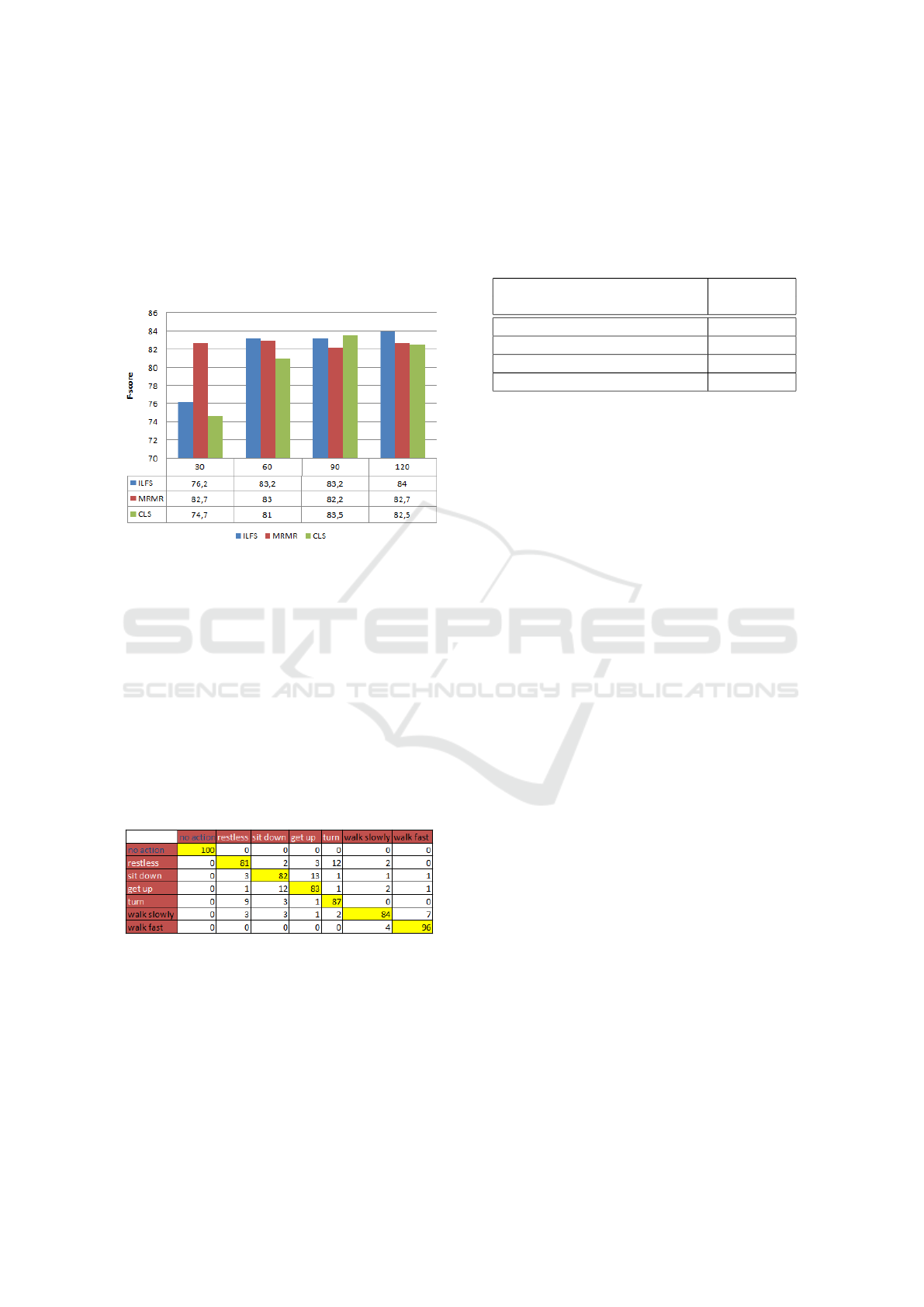
Concerning the selection of features for classifier
3 (small movement), Figure 7 shows that instead of
the 135 descriptors resulting from the combination of
Hu and CHOP, we can use 120 features selected by
ILFS method while achieving a slightly increased per-
formance.
Figure 7: Results of feature selections for classifier 3: small
movements.
Table 5 presents the confusion matrix of the pro-
posed hierarchical approach using for classifier 1, the
first 60 descriptors provided by the ILFS method, then
for classifier 2, the first 30 descriptors provided by
MRMR, and finally for classifier 3, the first 120 de-
scriptors provided by the ILFS method. This selection
allows to achieve a F-score value of 87.5%. It leads
to an homogenization of the recognition rates within
small movement but still fails discriminating slow and
fast walking.
Table 5: Confusion matrix with feature selection: F-
score=87.5%.
4.5 Evaluation Review
We also compared the performance of the pro-
posed hierarchical model with one depth learning ap-
proach, namely 3D-CNN (3D-Convolutional Neural
Network), which is widely used for action recognition
(Ji et al., 2012). In (Polla et al., 2019) it is shown that
the 3D-CNN model is more efficient for our database
than the LSTM model or 3D-CNN combined with the
LSTM. This method aims at learning motion features
by learning a hierarchy consisting of multiple lay-
ers of 3D spatio-temporal convolution kernels whose
last layer output is used by a Multi Layer Perceptron
(MLP) for classification.
Table 6: Summary table of comparisons.
Models
F-score
(7 classes)
best result for raw classification 83%
3D-CNN with MLP 85%
hierarchical without selection 86.7%
hierarchical with selection 87.5%
Table 6 summarizes the different classification re-
sults obtained for the different tests. The deep learn-
ing model only achieve a F-score of 85%, which
stresses the relevance of the proposed model.
5 CONCLUSION AND
PERSPECTIVES
In this article, we present a hierarchical model for ac-
tion recognition using low-resolution infrared video.
This approach results in a classification rate of 87.5%
while with a raw classification approach, 83% of F-
score is achieved. The proposed approach even ex-
ceeds advanced methods such as the one based on
neural networks. These results are quite interesting
considering the type and quality of the sensor, con-
straint of the project (position of sensor in top view)
and also the non-similarity of the shape within a same
class (see Figure 4.(b) restlessness, for example). In
future work, we plan to do action recognition on long
videos. This will allow to answer the problematic of
video sequence clipping for the classification.
ACKNOWLEDGEMENTS
The authors wish to thank BPI France, the Regional
Councils of Limousin and Rh
ˆ
one-Alpes with FEDER,
Department Council of Is
`
ere and District town of
Bourges, Bourges Plus, for providing the financial
support to CoCAPs project. The CoCAPs project,
from FUI N
◦
20, is also supported by clusters S2E2,
Minalogic.
A Hierarchical Approach for Indoor Action Recognition from New Infrared Sensor Preserving Anonymity
235

REFERENCES
Ahad, M. A. R., Tan, J. K., Kim, H., and Ishikawa, S.
(2012). Motion history image: its variants and appli-
cations. Machine Vision and Applications, 23(2):255–
281.
Auffarth, B., L
´
opez, M., and Cerquides, J. (2010). Compar-
ison of redundancy and relevance measures for feature
selection in tissue classification of ct images. In In-
dustrial Conference on Data Mining, pages 248–262.
Springer.
Biesiada, J., Duch, W., Kachel, A., Maczka, K., and
Palucha, S. (2005). Feature ranking methods based on
information entropy with parzen windows. In Interna-
tional Conference on Research in Electrotechnology
and Applied Informatics, pages 1–9.
Bobick, A. F. and Davis, J. W. (2001). The recognition
of human movement using temporal templates. IEEE
Transactions on Pattern Analysis & Machine Intelli-
gence, (3):257–267.
Coster, M. and Chermant, J.-L. (1989). Pr
´
ecis d’analyse
d’images. Technical report, Presses du CNRS.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Computer Vision
and Pattern Recognition (CVPR).
Filippoupolitis, A., Oliff, W., Takand, B., and Loukas, G.
(2017). Location-enhanced activity recognition in
indoor environments using off the shelf smartwatch
technology and ble beacons. Sensors, 17(6):1230.
Gorelick, L., Blank, M., Shechtman, E., Irani, M., and
Basri, R. (2007). Actions as space-time shapes. IEEE
transactions on pattern analysis and machine intelli-
gence, 29(12):2247–2253.
Hall, M. A. (1999). Correlation-based feature selection for
machine learning. PhD thesis, New Zealand, Depart-
ment of Computer Science, Waikato University.
Hofmann, T. (1999). Probabilistic latent semantic analysis.
In Proceedings of the Fifteenth conference on Uncer-
tainty in artificial intelligence, pages 289–296.
Hu, M.-K. (1962). Visual pattern recognition by moment
invariants. IRE transactions on information theory,
8(2):179–187.
Jalal, A., Kim, Y.-H., Kim, Y.-J., Kamal, S., and Kim, D.
(2017). Robust human activity recognition from depth
video using spatiotemporal multi-fused features. Pat-
tern recognition, 61:295–308.
Ji, S., Xu, W., Yang, M., and Yu, K. (2012). 3d convolu-
tional neural networks for human action recognition.
IEEE transactions on pattern analysis and machine
intelligence, 35(1):221–231.
Laptev, I., Marszałek, M., Schmid, C., and Rozenfeld,
B. (2008). Learning realistic human actions from
movies.
Liu, L., Shao, L., and Rockett, P. (2013). Boosted
key-frame selection and correlated pyramidal motion-
feature representation for human action recognition.
Pattern recognition, 46(7):1810–1818.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Luo, X., Guan, Q., Tan, H., Gao, L., Wang, Z., and Luo,
X. (2017). Simultaneous indoor tracking and activity
recognition using pyroelectric infrared sensors. Sen-
sors (Basel), 17(8):1738.
Mohibullah, M., Hossain, M. Z., and Hasan, M. (2015).
Comparison of euclidean distance function and man-
hattan distance function using k-mediods. Interna-
tional Journal of Computer Science and Information
Security, 13(10):61.
Peng, H., Long, F., and Ding, C. (2005). Feature selec-
tion based on mutual information: criteria of max-
dependency, max-relevance, and min-redundancy.
IEEE Transactions on Pattern Analysis & Machine In-
telligence, (8):1226–1238.
Polla, F., Boudjelaba, K., Emile, B., and Laurent, H.
(2017). Proposal of segmentation method adapted
to the infrared sensor. In International Conference
on Advanced Concepts for Intelligent Vision Systems
(ACIVS), pages 639–650. Springer.
Polla, F., Laurent, H., and Emile, B. (2019). Action recog-
nition from low-resolution infrared sensor for indoor
use: a comparative study between deep learning and
classical approaches. In 20th IEEE International Con-
ference on Mobile Data Management (MDM), pages
409–414.
Ragb, H. K. and Asari, V. K. (2016). Color and local
phase based descriptor for human detection. In 2016
IEEE National Aerospace and Electronics Conference
(NAECON) and Ohio Innovation Summit (OIS), pages
68–73.
Robertson, N. and Reid, I. (2005). Behaviour understand-
ing in video: a combined method. In Tenth IEEE In-
ternational Conference on Computer Vision (ICCV),
volume 1, pages 808–815.
Roffo, G., Melzi, S., Castellani, U., and Vinciarelli, A.
(2017). Infinite latent feature selection: A probabilis-
tic latent graph-based ranking approach. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision, pages 1398–1406.
Sefen, B., Baumbach, S., Dengel, A., and Abdennadher, S.
(2016). Human activity recognition using sensor data
of smartphones and smartwatches. In Proceedings of
the 8th International Conference on Agents and Artifi-
cial Intelligence (ICAART), Volume 2, pages 488–493.
Wang, H., Kl
¨
aser, A., Schmid, C., and Liu, C.-L. (2013).
Dense trajectories and motion boundary descriptors
for action recognition. International journal of com-
puter vision, 103(1):60–79.
Yu, L. and Liu, H. (2003). Feature selection for high-
dimensional data: A fast correlation-based filter so-
lution. In Proceedings of the 20th international con-
ference on machine learning (ICML), pages 856–863.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
236
