
A Comparison of Visual Navigation Approaches based on Localization
and Reinforcement Learning in Virtual and Real Environments
Marco Rosano
1,2
, Antonino Furnari
1
, Luigi Gulino
2
and Giovanni Maria Farinella
1
1
Universit
`
a degli Studi di Catania, Catania, Italy
2
OrangeDev s.r.l., via Vasco de Gama 91, Firenze, Italy
Keywords:
Visual Navigation, Reinforcement Learning, Image-based Localization, First Person Vision.
Abstract:
Visual navigation algorithms allow a mobile agent to sense the environment and autonomously find its way
to reach a target (e.g. an object in the environment). While many recent approaches tackled this task using
reinforcement learning, which neglects any prior knowledge about the environments, more classic approaches
strongly rely on self-localization and path planning. In this study, we compare the performance of single-
target and multi-target visual navigation approaches based on the reinforcement learning paradigm, and simple
baselines which rely on image-based localization. Experiments performed on discrete-state environments
of different sizes, comprised of both real and virtual images, show that the two paradigms tend to achieve
complementary results, hence suggesting that a combination of the two approaches to visual navigation may
be beneficial.
1 INTRODUCTION
In robotics, one of the most required ability for an
intelligent robot that has to operate in a given envi-
ronment is to autonomously navigate inside it with a
certain degree of accuracy. While humans can eas-
ily navigate in a wide variety of spaces and adapt to
unseen environments, the autonomous robot naviga-
tion problem is still unsolved, even if several meth-
ods have been proposed over the years. Classic “map-
based” approaches to visual navigation generally need
1) the construction of an explicit map of the environ-
ment and 2) a path planning strategy to exploit the
acquired knowledge (Thrun et al., 2005).
To avoid the limitations of map-based approaches,
recent works have tackled the navigation problem
considering “map-less” methods , which only con-
sider a form of implicit representation of the geom-
etry of the space, usually obtained using Convolution
Neural Networks (CNNs) directly trained on images
of the environment (Mirowski et al., 2016; Zhu et al.,
2017; Gupta et al., 2017). In particular, Deep Rein-
forcement Learning (DRL) models recently emerged
as promising methods to learn navigation policies in
a end-to-end manner (Mirowski et al., 2016; Zhu
et al., 2017). Such methods consider high dimen-
sional data as input (often in the form of images)
and return the actions required to reach a specific tar-
get location. While we would expect DRL naviga-
tion approaches to be applied to real world contexts,
due to the learning-by-simulation approach imposed
by reinforcement learning, most research studies fo-
cus on simulated data (Mnih et al., 2013; Mirowski
et al., 2016; Kempka et al., 2016), even able to recre-
ate the appearance of real environments from images
and to emulate interactions with the agent (i.e. colli-
sions) (Xia et al., 2018; Savva et al., 2019). Despite
such efforts, the substantial domain gap between real
and simulated environments can harm the ability of
these approaches to generalize to real environments.
In this paper, we compare map-based and map-
less visual navigation approaches considering both
single-target and multi-target settings. The consid-
ered map-based algorithms rely on a simple image-
retrieval localization approach (Orlando et al., 2019)
coupled with a path planning routine based on the
computation of the shortest path between the cur-
rent and target locations. The considered map-less
approaches are based on reinforcement learning and
consider both single (Konda and Tsitsiklis, 2000;
Mnih et al., 2016) and multi-target variants (Zhu
et al., 2017). We performed the experiments in envi-
ronments comprising both real and simulated images,
characterized by different sizes, varying the number
of target states to be reached. In the case of multi-
target methods, we tested the generalization ability to
navigate to target states at given distances from the
628
Rosano, M., Furnari, A., Gulino, L. and Farinella, G.
A Comparison of Visual Navigation Approaches based on Localization and Reinforcement Learning in Virtual and Real Environments.
DOI: 10.5220/0008950806280635
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
628-635
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ones seen during training. We report results in terms
of success rate (whether the agent can reach the tar-
get in a limited number of steps) and average num-
ber of steps required to reach the target state. The
considered approaches are compared with respect to
two baselines: an ORacle agent (OR), which always
follows the optimal path to the target state, and a Ran-
dom Walker agent (RW), which follows a random pol-
icy to reach the target.
The results highlight that map-less approaches
based on Reinforcement Learning can achieve op-
timal performances when navigating to targets seen
during training, but are limited when it comes to gen-
eralizing to unseen targets and scaling to large envi-
ronments. Map-based approaches based on localiza-
tion obtain encouraging and complementary results,
despite the poor performance of the localization mod-
ule alone, which suggests that combining approaches
based on RL and localization can be beneficial.
The remainder of the paper is organized as fol-
lows. Section 2 describes the related works. In Sec-
tion 3, we describe the compared approaches. Exper-
imental settings are discussed in Section 4 and results
in Section 5. Section 6 concludes the paper and dis-
cusses future works.
2 RELATED WORKS
Previous works have investigated visual navigation
according to two main settings: map-based and map-
less. Map-based navigation relies on a map of the en-
vironment either created beforehand or built on the
fly during navigation. Map-less navigation relies on
Deep Neural Networks to extract an implicit repre-
sentation of the world from images or other sensory
input. This representation is then used to perform
the navigation task. The learning process can be per-
formed using Imitation Learning (IL) and Reinforce-
ment Learning (RL) as discussed in the following.
Map-based Visual Navigation. Methods falling into
this category assume a map of the environment to
be known and employ path planning (Hong Zhang
and Ostrowski, 2002) or obstacle avoidance algo-
rithms (Ulrich and Borenstein, 1998) to navigate to
the destination. Convolutional Networks have been
also used to create a top-down spatial memory from
first-person views (Gupta et al., 2017) or to local-
ize the agent using image-based localization tech-
niques (Kendall et al., 2015; Orlando et al., 2019),
and then apply a path-planning algorithm to find the
optimal route to the target.
Image-based Localization. Image-based localiza-
tion plays a central role in the task of sensing an envi-
ronment by an autonomous robot. Localization meth-
ods based on classification usually discretize the envi-
ronment by dividing it into classes and address local-
ization as a classification task (Ragusa et al., 2019).
Despite the good performances of these approaches,
they are not able to provide an accurate estimation
of the camera pose. Image-retrieval methods rely on
image representation techniques (J
´
egou et al., 2010;
Arandjelovic et al., 2016) and reduce the pose esti-
mation problem to a nearest neighbor search in the
feature space (Orlando et al., 2019). Image local-
ization can also be tackled as a regression problem,
where a CNN is used to directly estimate the cam-
era pose from images (Kendall et al., 2015). 2D-3D
matching approaches start by extracting 2D feature
points from images, then create a correspondence be-
tween these 2D points and 3D points of a given model
of the scene. The 3D model could be known be-
forehand (Sattler et al., 2016) or incrementally con-
structed (Schnberger and Frahm, 2016).
Map-less Visual Navigation based on Imitation
Learning. These approaches allow to plan the se-
quence of actions to be performed directly from raw
images of the environment, taking advantage of the
ability to learn deep models end-to-end. In Imi-
tation Learning, the policy is obtained from expert
demonstrations, as in a classic supervised learning
setup (Bojarski et al., 2016; Giusti et al., 2015). Un-
fortunately, this approach often leads to unstable poli-
cies, since the model is hardly able to recover in case
of drift (Ross et al., 2010). To overcome the prob-
lem of unseen situations due to limited demonstra-
tions, several strategies have been adopted to increase
the number of labelled samples (Bojarski et al., 2016;
Giusti et al., 2015).
Map-less Visual Navigation based on Reinforce-
ment Learning. In navigation approaches based on
Reinforcement Learning (RL), the agent starts explor-
ing the environment following a random navigation
policy and learns the optimal set of actions by receiv-
ing a positive reward signal when it reaches the goal
state, after performing several navigation episodes. In
the case of single-target navigation, the model learns
to navigate to only one destination and the policy
optimization depends only on the collected egocen-
tric views acquired along the trajectory (Mnih et al.,
2016). In the case of multi-target navigation, the op-
timization of the policy also depends on a target im-
age, which is given as input together with the current
state (Zhu et al., 2017). The need of a single model
capable of learning a multi-target navigation policy
drove the authors of (Zhu et al., 2017) to propose a
DRL model trained considering as input both an im-
age of the the target state and the current state repre-
A Comparison of Visual Navigation Approaches based on Localization and Reinforcement Learning in Virtual and Real Environments
629
sentation in a indoor simulated environment.
3 METHODS
We compare the following approaches to visual
navigation: i) map-less single-target Reinforcement
Learning; ii) map-less multi-target Reinforcement
Learning; iii) map-based navigation using image-
retrieval for localization. Please note that the last
approach is by design a multi-target approach, as it
does not require a target-specific policy learning. We
further compare these approaches with respect to two
baselines consisting in a Random Walker agent (RW)
which follows a random navigation policy and an Ora-
cle agent (OR) which always follows the shortest path
to the destination.
Single Target Reinforcement Learning Method
(A2C). In classic RL models the goal is fixed (Mnih
et al., 2013; Kempka et al., 2016). To perform simula-
tions, the starting state is randomly sampled from the
set of all states in order to obtain a better generalized
policy across starting locations. In our experiments,
we trained a A2C actor-critic model (Konda and Tsit-
siklis, 2000) to accomplish the navigation task.
Multi Target Reinforcement Learning Method
(A3C). Recent works tackled the multi-goal naviga-
tion problem designing models that consider as input
both the current state and an RGB image of the tar-
get location. The policy is hence learned on the pair
of current and target images. In our experiments, we
used the method proposed in (Zhu et al., 2017) to
handle multi-target navigation.
Method based on Visual Localization (LB). This
method relies on a localization module which allows
to estimate the pose of an image inside an environ-
ment performing a nearest neighbor search in the rep-
resentation space. Based on the estimated location,
the shortest path to the destination is computed, from
which we can derive the optimal sequence of actions
to be taken to reach the target. To perform localiza-
tion, we rely on a separate set of images, in which
each image has been attached its position in the en-
vironment using Structure From Motion (Schnberger
and Frahm, 2016). Then image representations are
extracted using VGG16 (Simonyan and Zisserman,
2015) CNN pre-trained on ImageNet and the position
of the agent in the environment is estimated using a
nearest neighbor search in the representation space.
0.5m
0°
90°
180°
270°
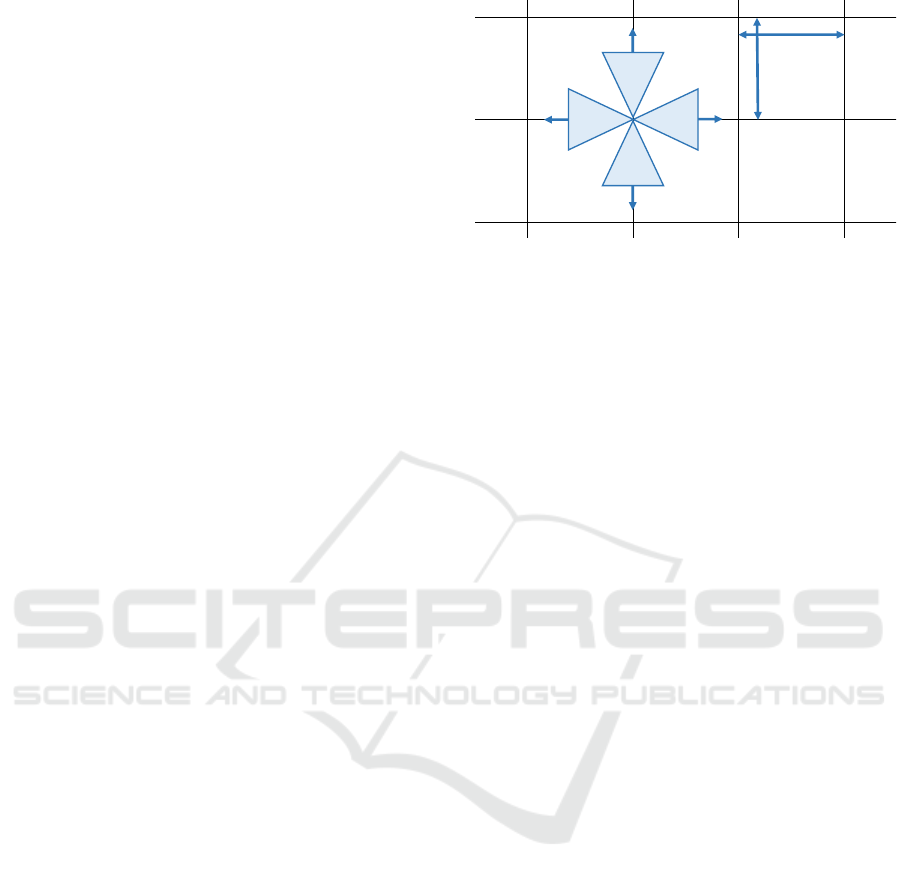
Figure 1: Images of the environments were collected fol-
lowing a grid pattern with a step size of 0.5m. For each
point of the grid, we collected four images at the four main
orientations: [0
◦
, 90
◦
, 180
◦
, 270
◦
].
4 EXPERIMENTAL SETTINGS
In this section, we report details about our experi-
mental setup, including the environments and how the
navigation simulations are performed, the training de-
tails of the navigation methods, and the evaluation
procedure.
4.1 Environments and Simulations
To perform experiments on both synthetic and real
environments, we follow the setup of (Zhu et al.,
2017). This setup involves running the simulations
on a grid of possible states, sampled at a regular step
of 0.5m. Each point of the grid corresponds to four
states characterized by the same position (the posi-
tion on the grid), combined with four possible orien-
tations: [0
◦
, 90
◦
, 180
◦
, 270
◦
]. For each state (position-
orientation pair), an RGB image is collected whether
from the real-world or virtual environment. Figure 1
provides a visual example of the grid pattern used to
collect the images. Each collected image represents
one discrete state in which the agent can be. The agent
can navigate through the states by performing four
possible actions: go forward, turn left, turn right, go
backward. A state-transition matrix specifies which
state can be reached from another state performing
one of the actions and which states do not allow to
perform any action. A simple routine which allows
to retrieve the image observed of the next state when
taking an action at the current state is used both at
training and test time to simulate navigation. We re-
fer to the execution of one of the action in a given
state as a “step”.
For our experiments, we considered the four vir-
tual environments proposed in (Zhu et al., 2017).
Given the scarcity of datasets of real images for vi-
sual navigation (Zhu et al., 2017), we also collected
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
630

Figure 2: Sample RGB images of the real and virtual environments considered in this study. The Real Small Environment
(RSE) (top left) consists of 148 images/states. The Real Big Environment (RBE) (top right) consists of 979 images/states.
The virtual environments (bottom) have different sizes (see Table 1).
Table 1: List of the environments used to perform our ex-
periments along and related properties.
Env. name Real #states Source
RSE yes 148 this work
bathroom 02 no 180 (Zhu et al., 2017)
bedroom 04 no 408 (Zhu et al., 2017)
living room 08 no 468 (Zhu et al., 2017)
kitchen 02 no 676 (Zhu et al., 2017)
RBE yes 979 this work
images from two additional real environments for this
study. The list of all environments and their properties
is reported in Table 1. The Real Small Environment
(RSE) consists of images of a small office, collected
with a reflex camera at a resolution of 5184 × 3456
pixels. The Real Big Environment (RBE) consists
of images of an open-plan office, collected using a
robotic platform
1
with an on-board camera at a res-
olution of 1192 × 670 pixels. All the other environ-
ments in Table 1 have been acquired from (Zhu et al.,
2017). Sample images from the considered environ-
ments are shown in Figure 2.
4.2 Navigation Methods based on
Reinforcement Learning
Feature Extraction. We run all RL methods on fea-
tures extracted from the input images. To this pur-
pose, each RGB image has been resized to 400 × 300
pixels. The image is then processed by a ResNet-
50 CNN (He et al., 2016), pre-trained on Ima-
geNet (Deng et al., 2009) to extract its representation
vector. This has been done by removing the last clas-
1
We used the Sanbot Elf Robotic Platform.
http://en.sanbot.com.
sification layer from the CNN in order to obtain 2048-
dimensional representation vectors.
Training. Each of the considered models gives as
output the value of the current state and a probabil-
ity distribution over the 4 actions which can be per-
formed by the agent: go forward, turn left, turn right,
go backward. Training is performed by sampling
a number of targets proportional to the environment
size, following a uniform distribution. The second
column of Table 2 reports the number of target states
used for training on each environment. The agent is
then placed at a new random starting position and nav-
igates to the target state following the current policy.
The episode ends when the agent reaches the target
state (success) or when the maximum number of al-
lowed steps (set to 5000) is reached (fail). The tar-
get state reward was set to 20, whereas we introduce
a penalty equal to −0.1 for each navigation step or
collision. At the end of each episode, the policy is
updated to maximize the cumulative reward.
A2C - Architecture and Testing. The architecture
consists of 2 fully connected layers with 512 and 128
units respectively, Rectified Linear Units (ReLUs) as
activation functions, and an output layer with 5 units
(4 to represent a probability distribution over actions
and 1 to represent the value of the current state). Since
the method is single-target, we trained as many mod-
els as the number of targets over all environments.
This amounts to a total of 33 models. We trained all
the models for 50.000 episodes, obtaining a good con-
vergence to the optimal policy. At test time, for each
target state, we performed different navigation trials
starting from different random initial states. The third
column of Table 2 reports the number of initial states
selected per target state, for each environment.
A3C - Architecture and Testing. This method fol-
lows the architecture proposed in (Zhu et al., 2017).
A Comparison of Visual Navigation Approaches based on Localization and Reinforcement Learning in Virtual and Real Environments
631

Table 2: Number of targets seen during training and number
of test trials performed for each target. In the case of multi-
target methods, test targets are sampled at given distances
from the ones seen during training. See text for details.
Env. name # target states # test trials (x target)
RSE 3 3
bathroom 02 3 3
bedroom 04 5 5
living room 08 5 5
kitchen 02 7 7
RBE 10 10
As proposed by the authors, we feed the model with
the concatenated representations of the images of the
last 4 visited states to provide a history to the model.
The concatenated features are hence fed to a layer of
512 units. The target to reach is specified by provid-
ing also the representation of the target image as in-
put. As suggested in (Zhu et al., 2017), this input is
replicated 4 times to balance with respect to the num-
ber of history images and fed to another layer of 512
units. The 512-dimensional resulting embeddings are
concatenated and passed to the final part of the ar-
chitecture, composed of 2 fully connected layers with
512 units each and a final output layer with 5 units to
represent a probability distribution over actions and
the value of the current state. Since the method is
multi-target, we trained only one model for each envi-
ronment until convergence, for a total of 6 models. At
test time, to evaluate the ability of the model to gen-
eralize to unseen targets, we sampled a set of testing
targets at several distances (0, 1, 2, 4, 8 steps) from
the ones used for training. For each of the selected
testing target, we performed different navigation tri-
als starting from different random initial states. The
third column of Table 2 reports the number of initial
states selected in each trials.
4.3 Navigation Method based on
Localization
We compared the approaches based on Reinforcement
Learning with respect to a more classic navigation ap-
proach which relies on a visual localization module
based on image-retrieval. The goal of the localization
module is to determine in which state the agent is lo-
cated from the observation of the current state. Once
this information is obtained, the agent navigates to the
target by following the minimum path computed with
the Dijkstra algorithm (Cormen et al., 2001). Since
the localization algorithm may be inaccurate and fail
in some circumstances, we repeat localization and
computation of the minimum path every 5 steps, when
an invalid action is performed or when a loop in the
followed path is detected.
To perform the image-based localization, we col-
lected an additional set of images of the RBE envi-
ronment, consisting of 4072 RGB images, with a res-
olution of 1192 × 670 pixels. The images have been
acquired along random straight trajectories that cov-
ered the entire space. A 3D model of the environment
has been created using Structure From Motion (Schn-
berger and Frahm, 2016). The model has then been
aligned to a map of the environment to correct for
translation, orientation and scale. This process al-
lows to label each of the images with a 3DOF pose
which can be used for localization. Starting from this
set of images, we created a secondary regular grid
of images following the grid pattern used to acquire
the main dataset and sampling the nearest image to
each grid-point, in terms of euclidean distance and
absolute angle difference. We extracted representa-
tion vectors from each image of both the environ-
ment and the secondary set of images using a VGG-16
CNN (Simonyan and Zisserman, 2015) pre-trained on
ImageNet (Deng et al., 2009), after resizing them to
a resolution of 256 × 256 pixels and applying a cen-
ter crop, obtaining a final size of 224 × 224 pixels.
The final classification layer of the CNN has been
removed to obtain 4096-dimensional representation
vectors. Given the image of the current state, the lo-
calization is performed with a nearest neighbor search
in the representations space, which allows to estimate
the state in which the actor is currently located.
4.4 Evaluation
We evaluated the performances of the different mod-
els in terms of average number of steps required to
reach the target and success rate (i.e., whether the
agent can reach the target in a limited number of
steps). All results have been obtained by averag-
ing the performance scores over all episodes obtained
starting from the randomly sampled locations. We set
a threshold of 100 steps to determine if an episode is
successful or not. We think this value is reasonable to
allow the agent to navigate without a too strict restric-
tion, but still in a limited number of steps. It is im-
portant to point out that all target and starting states
have been initially sampled and saved. All models
have been hence evaluated using the previously sam-
pled starting/target pairs for fair comparison.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
632

Figure 3: Performances of visual navigation methods in terms of average number of steps required to reach the target states
from random initial positions. The target states have been sampled at a distance of 0, 1, 2, 4, and 8 steps from the ones used
during training in the case of multi-target methods. This is a graphical representation of the results reported in Table 3.
5 RESULTS
Table 3 report the results of the considered visual nav-
igation methods in terms of average number of steps
and success rate required to reach the targets in the
different environments. Figure 3 further shows the
average number of steps in a visual form. The A3C
model achieves near-optimal results, comparable to
the ones obtained by the OR strong baseline on targets
seen during training (distance 0). The performances
of the A2C and A3C models on targets seen during
training (distance 0) are comparable over all environ-
ments, except for RBE. This suggests that A3C can
benefit more from the additional training signal pro-
vided by larger and more complex environments. It is
worth noting tat the A3C algorithm shows a good abil-
ity to learn multiple optimal policies to different target
states of the same environment within a single model.
This is different from A2C, which can reach similar
performance on most of the environments learning a
different policy for each target. This makes A3C more
data and computation efficient, requiring to train only
one model per environment, rather than one model per
target. Somewhat surprisingly, despite the good re-
sults obtained on targets seen during training, the per-
formances quickly deteriorate when the target states
A Comparison of Visual Navigation Approaches based on Localization and Reinforcement Learning in Virtual and Real Environments
633
Table 3: Performances of visual navigation methods in terms of average number of steps and success rate (in parentheses)
required to reach the target states from random initial positions. The target states have been sampled at a distance of 0, 1, 2,
4, and 8 steps from the ones used during training in the case of multi-target methods.
Env. RSE
Distance A3C A2C RW OR
0 7.1 (100) 7.3 (100) 263.3 (11) 6.0 (100)
1 1725.2 (44) - 653.0 (11) 8.3 (100)
2 1805.7 (33) - 813.8 (0) 7.8 (100)
4 2864.4 (33) - 598.2 (0) 7.6 (100)
8 4331.7 (0) - 961.3 (11) 7.8 (100)
Env. bedroom 04
Distance A3C A2C RW OR
0 12.9 (100) 13.1 2221.7 (8) 11.8 (100)
1 1961.5 (52) - 2052.1 (4) 12.8 (100)
2 1068.4 (60) - 2149.6 (12) 12.4 (100)
4 4210.1 (8) - 2229.4 (8) 14.2 (100)
8 2961.1 (4) - 1723.2 (12) 13.4 (100)
Env. kitchen 02
Distance A3C A2C RW OR
0 19.9 (100) 21.5 (100) 5912.9 (4) 18 (100)
1 1449.1 (61) - 6056 (8) 19.3 (100)
2 1704.1 (38) - 3947.4 (6) 16.8 (100)
4 2213 (22) - 4560.2 (8) 18.1 (100)
8 3272.4 (6) - 5031.9 (8) 18.2 (100)
Env. bathroom 02
Distance A3C A2C RW OR
0 8.4 (100) 10 (100) 661.1 (11) 7.8 (100)
1 85.4 (66) - 1348.4 (33) 8 (100)
2 1921 (44) - 353.8 (33) 5.8 (100)
4 2273.4 (11) - 409.1 (22) 5.6 (100)
8 3561.6 (22) - 478.3 (33) 7.4 (100)
Env. living room 02
Distance A3C A2C RW OR
0 15.8 (100) 19.2 (100) 2836 (8) 14.2 (100)
1 504.9 (64) - 3780.6 (4) 15.8 (100)
2 3950 (0) - 2766.3 (4) 15.4 (100)
4 3117.4 (28) - 3117.4 (4) 15.4 (100)
8 2563.2 20) - 4322.9 (16) 15.6 (100)
Env. RBE
Distance A3C A2C LB RW OR
0 23 (100) 36.7 (100) 39,8 (98) 5672.7 (7) 19 (100)
1 1987.6 (32) - 40.2 (95) 6246.7 (3) 17.9 (100)
2 2317.9 (15) - 38.6 (97) 6434 (3) 21.1 (100)
4 3454.2 (19) - 38.7 (96) 7549.9 (5) 17.3 (100)
8 2650.5 (32) - 55 (95) 4586.1 (7) 18.6 (100)
are sampled even at small distances from the trained
ones. These results are sub-optimal even with re-
spect to the RW baseline for smaller environments in
terms of number of steps (see Table 3 and Figure 3),
whereas marginally lower numbers of steps are re-
quired in large environments compared to RW. Nev-
ertheless, when the models are evaluated in terms of
success rate, A3C is consistently worse than RW in-
dependently from the type/size of environment. This
suggests that 1) the multi-target A3C model needs to
see large amounts of data in order to even partially
generalize to unseen targets and, 2) it is more prone
to learn a limited number of navigation policies re-
lated to the targets seen during training, rather than
a generalized policy useful for navigating to unseen
targets. Moreover, we noticed that the model hardly
converged to optimal trajectories when trained on a
number of targets greater than 10, implying a limited
ability of the training procedure to scale to a larger
number of targets/policies. In addition, the success
rate of A3C on the larger environment report an aver-
age value lower than 0.4 for targets at a distance of 1
step. The results suggest that more efforts should be
devoted to designing RL models able to learn a better
state representation space, in order to have a consis-
tent neighbourhood relationship between near states,
to efficiently transfer the learnt knowledge to previous
unseen samples.
We finally compare the approaches based on re-
inforcement learning with the baseline relying on vi-
sual localization (LB) on RBE. As can be assessed
from Figure 3 and Table 3, LB achieves performances
comparable to A2C and suboptimal with respect to
the ones obtained by A3C when the targets are the
ones seen during the training of the RL methods. No-
tably, while the performances of A3C quickly deteri-
orate for targets not seen during training, the perfor-
mances of LB remain overall constant. This is due to
the fact that, since the policy is not explicitly learned
in the case of LB, the method does not suffer from
over-fitting to a specific target. Additionally, when
evaluated in terms of success rate, the LB approach
achieves results close to 100% and comparable to the
ones obtained by the OR baseline. While such advan-
tages over RL approaches are obtained at the expenses
of building a visual localization system, it should be
noted that methods based on localization can achieve
good results even in the presence of poor localization.
Indeed, the visual localization method of LB achieved
an average localization error of 3.86m and an average
orientation error of 53.85
◦
. The complementarity of
the results obtained by methods based on reinforce-
ment learning and the baseline relying on visual lo-
calization suggest that better results, especially for the
multi-target case, can be obtained from the integra-
tion of the two approaches. For instance, RL meth-
ods could benefit from a coarse localization obtained
using simple techniques such as image-retrieval. We
leave the investigation of such integration to future
works.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
634

6 CONCLUSION
In this paper, we compared visual navigation methods
based on reinforcement learning and localization. We
performed experiments on differently sized discrete-
state environments composed of both virtual and real
images. The results suggest that, despite the avail-
ability of multi-target approaches, visual navigation
methods based on reinforcement learning have diffi-
culties to generalize to targets unseen during training.
On the contrary, a simple baseline which relies on in-
accurate localization achieves similar results on tar-
gets seen during training and generalizes better to un-
seen targets. These observations suggest that methods
based on reinforcement learning could benefit even
from inaccurate localization. Future works can inves-
tigate approaches to fuse visual navigation methods
based on reinforcement learning and localization.
ACKNOWLEDGEMENTS
This research is supported by OrangeDev s.r.l. and
Piano della Ricerca 2016-2018, Linea di Intervento 2
of DMI, University of Catania.
REFERENCES
Arandjelovic, R., Gronat, P., Torii, A., Pajdla, T., and Sivic,
J. (2016). Netvlad: Cnn architecture for weakly super-
vised place recognition. In CVPR, pages 5297–5307.
Bojarski, M., Testa, D. D., Dworakowski, D., Firner, B.,
Flepp, B., Goyal, P., Jackel, L. D., Monfort, M.,
Muller, U., Zhang, J., Zhang, X., Zhao, J., and Zieba,
K. (2016). End to end learning for self-driving cars.
CoRR, abs/1604.07316.
Cormen, T. H., Stein, C., Rivest, R. L., and Leiserson, C. E.
(2001). Introduction to Algorithms. McGraw-Hill
Higher Education, 2nd edition.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR.
Giusti, A., Guzzi, J., Cires¸an, D. C., He, F.-L., Rodr
´
ıguez,
J. P., Fontana, F., Faessler, M., Forster, C., Schmidhu-
ber, J., Di Caro, G., et al. (2015). A machine learning
approach to visual perception of forest trails for mo-
bile robots. RA-L, 1(2):661–667.
Gupta, S., Davidson, J., Levine, S., Sukthankar, R., and Ma-
lik, J. (2017). Cognitive mapping and planning for
visual navigation. In CVPR, pages 7272–7281.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In CVPR, pages
770–778.
Hong Zhang and Ostrowski, J. P. (2002). Visual motion
planning for mobile robots. T-RA, 18(2):199–208.
J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010).
Aggregating local descriptors into a compact image
representation. In CVPR, pages 3304–3311.
Kempka, M., Wydmuch, M., Runc, G., Toczek, J., and
Ja
´
skowski, W. (2016). Vizdoom: A doom-based ai re-
search platform for visual reinforcement learning. In
CIG, pages 1–8.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet:
A convolutional network for real-time 6-dof camera
relocalization. In ICCV, pages 2938–2946.
Konda, V. R. and Tsitsiklis, J. N. (2000). Actor-critic algo-
rithms. In NIPS, pages 1008–1014.
Mirowski, P., Pascanu, R., Viola, F., Soyer, H., Ballard,
A. J., Banino, A., Denil, M., Goroshin, R., Sifre,
L., Kavukcuoglu, K., Kumaran, D., and Hadsell, R.
(2016). Learning to navigate in complex environ-
ments. CoRR, abs/1611.03673.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.,
Harley, T., Silver, D., and Kavukcuoglu, K. (2016).
Asynchronous methods for deep reinforcement learn-
ing. In ICML, pages 1928–1937.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. In NIPS Deep Learning Workshop.
Orlando, S. O., Furnari, A., Battiato, S., and Farinella,
G. M. (2019). Image-based localization with simu-
lated egocentric navigations. In VISAPP.
Ragusa, F., Furnari, A., Battiato, S., Signorello, G., and
Farinella, G. (2019). Egocentric visitors localization
in cultural sites. JOCCH, 12:1–19.
Ross, S., Gordon, G., and Bagnell, J. (2010). A reduction
of imitation learning and structured prediction to no-
regret online learning. JMLR, 15.
Sattler, T., Leibe, B., and Kobbelt, L. (2016). Efficient &
effective prioritized matching for large-scale image-
based localization. PAMI, 39(9):1744–1756.
Savva, M., Kadian, A., Maksymets, O., Zhao, Y., Wijmans,
E., Jain, B., Straub, J., Liu, J., Koltun, V., Malik, J.,
et al. (2019). Habitat: A platform for embodied ai
research. arXiv preprint arXiv:1904.01201.
Schnberger, J. L. and Frahm, J. (2016). Structure-from-
motion revisited. In CVPR, pages 4104–4113.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
ICLR.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilistic
robotics. MIT press.
Ulrich, I. and Borenstein, J. (1998). Vfh+: Reliable obstacle
avoidance for fast mobile robots. In ICRA, volume 2,
pages 1572–1577.
Xia, F., Zamir, A. R., He, Z., Sax, A., Malik, J., and
Savarese, S. (2018). Gibson env: Real-world percep-
tion for embodied agents. In CVPR, pages 9068–9079.
Zhu, Y., Mottaghi, R., Kolve, E., Lim, J. J., Gupta, A., Fei-
Fei, L., and Farhadi, A. (2017). Target-driven visual
navigation in indoor scenes using deep reinforcement
learning. In ICRA, pages 3357–3364.
A Comparison of Visual Navigation Approaches based on Localization and Reinforcement Learning in Virtual and Real Environments
635
