
Reflective Surface Reconstruction from Inverse Deflectometric
Measurements
Dominik Penk
1
, Roman Sturm
2
, Lars Seifert
3
, Marc Stamminger
1
and G
¨
unther Greiner
1
1
Visual Computing Lab, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg (FAU), Cauerstraße 11, Erlangen, Germany
2
Rupp + Hubrach Optik GmbH, Von-Ketteler-Straße 1, Bamberg, Germany
3
Fraunhofer IIS, Flugplatzstraße 75, F
¨
urth, Germany
marc.stamminger@fau.de
Keywords:
Reconstruction, Quality Control, Simulation, Numerical Optimization.
Abstract:
Reconstructing reflective surfaces is a difficult task since most algorithms rely on photometric consistency
between multiple views on the target object. However specular reflections are highly view dependent and thus
violate this assumption. Previous work therefore often incorporates additional information, like polarization
or the distortion of a known pattern, to perform specular surface reconstruction. We present a novel analy-
sis by synthesis approach that defines an optimization problem using samples directly on the reconstructed
surface. Based on this framework we describe two different setups for reconstruction, one using a line laser
to create a reflection pattern and a second one, that uses point measurements to provide ray-measurement
correspondences achieving improved accuracy.
1 INTRODUCTION
Above the age of 40 most people develop presbyopia,
an eye disease caused by decreasing flexibility of the
human eye lens. Focusing on close objects becomes
increasingly more difficult. The most common tool to
cope with this kind of defect is wearing glasses with
varying refractive power. There are bifocals, trifo-
cals and, nowadays most popular, so-called progres-
sive addition lenses (PAL). They have a continuously
varying refractive power, lower in the upper part of
the lens (which is typically used to observe distant ob-
jects, e.g. when driving) and higher in the lower part
of the lens (which is usually used for close objects,
e.g. when reading).
The design of such lenses is highly sophisticated
and the resulting geometry of the lens’ surfaces is
rather complex. The manufacturing is complicated
and requires high precision CNC cutting and polish-
ing machines. Quality control is very important, since
small errors in the geometry may lead to high changes
in refractive power. Currently used techniques to
measure PALs have various problems: Either they are
not sufficiently accurate, destructive, not fast enough
or require expensive hardware. Therefore, they can-
not be used in a production line to realize a complete
quality control. Furthermore, they either only mea-
sure the curvature of one surface or infer a total lens
power in transmission. For an as worn simulation
however, a surface reconstruction of front and back-
side of the lens is necessary. We set out to develop
an algorithm that directly computes the lens surface
(either front or back face) and derive the optical prop-
erties from there.
In this paper we derive an analysis-by-synthesis
approach to measure lenses based on recreating re-
flection patterns. We present two setups, one using a
line laser. The laser sheet is reflected by the lens and
generates a light curve on a screen that is recorded by
a standard camera. Moving the lens through the laser
generates a set of curves that are unique to each sur-
face. We describe a novel optimization scheme, that
from these curves directly reconstructs B-Spline co-
efficients defining the lens surface. Evaluation of this
setup implies that reconstruction accuracy is primar-
ily impeded by the continuous laser line prohibiting a
clear matching of ray to line position. To overcome
this hurdle, we propose the second setup in Sect. 4,
which uses a dot line laser instead of a continuous line
to produce single point measurements. These discrete
points represent a sparser sampling of the reflection
pattern, but also introduce a simple mapping from ray
to curve point.
The main contribution of this paper is the in-
76
Penk, D., Sturm, R., Seifert, L., Stamminger, M. and Greiner, G.
Reflective Surface Reconstruction from Inverse Deflectometric Measurements.
DOI: 10.5220/0008968600760084
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
76-84
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

troduction of an intuitive and efficient optimization
framework that
• directly determines surface parameters,
• has a simple analytic derivation supporting a fast
optimization, and
• is easy to adapt to both setups.
Furthermore, we present results from real world mea-
surements and simulated setups and discuss advan-
tages and drawbacks for both presented setups.
2 RELATED WORK
While there are many well-established methods to
measure/reconstruct surface geometry of diffuse ob-
jects, there are fewer techniques that are applica-
ble to reflective or transparent objects. On the one
hand there are contact based methods, so-called Co-
ordinate Measuring Machines (Hocken and Pereira,
2011). The accuracy is satisfactory, but the time for
precise measurements is high. Moreover, high pre-
cision CMMs are very costly. For measuring as-
pheric lenses/PALs optical based methods do a better
job. A common approach is based on interferometry
(Chamadoira et al., ). This method allows measuring
the optical properties/effects of the lens (e.g. spheri-
cal curvature and astigmatism) at specified points. It
is not possible to recover the actual surface geometry
of the lens. Hence it does not allow variance analysis
during production, i.e. comparing the fabricated lens
with design data and checking compliance of fault
tolerances. Another optical method for measuring is
based on deflectometry (Knauer et al., ; Kaminski,
2008; Knauer, 2006; Werling et al., 2007). One or two
cameras capture the mirror image of a regular pattern
(typically a sinusoidal one). Then the methods infer a
normal field that leads to the distortion of the regular
pattern. This method is very precise and can recover
the geometry of the reflective surface by integration
within reasonable time. When it is applied to PALs,
the back surface must be blackened during the mea-
surement. Clearly, this prohibits the use of the lens
after the measurement, i.e. this method is destructive
and cannot be used in a production line.
The method proposed by (Wedowski et al., 2012)
shares a similar setup to the one we propose, however
an initial reconstruction is required. In a second step
they estimate finer details on the object by estimating
a normal map from the reflection pattern.
To specify the geometry of PALs different math-
ematical models are used in the industry. Most pop-
ular are Zernicke polynomials (ZP) and tensor prod-
uct B-Splines. We use the latter description. First
of all because the samples we measured with our
approach where designed accordingly (Loos et al.,
1998). Moreover, to represent lenses with highly
varying refractive power, a ZP of high degree (up
to 20) is required, which causes stability issues for
numeric surface evaluation. Using tensor product B-
splines, the number of control points can be increased
to gain sufficient variability in the geometry, the poly-
nomial degree remains low and surface evaluation is
numerically reliable.
3 LINE MEASUREMENT
3.1 Setup
Our measuring arrangement is depicted in Fig. 1a and
consists of a line laser, a screen and a standard cam-
era. During a scan, we move the measured object
with constant velocity and capture the resulting re-
flection pattern on the screen. For each frame in the
acquired video stream, we detect the reflection curve.
To ease the following computations, we assume that
the curve has an explicit representation and find the
y-coordinate of the reflection curve for each camera
column. We store these values as columns of an im-
age, as depicted in Fig. 1c. The resulting image is
parameterized by the frame index ∆ and the camera
column; pixel values denote the y-coordinate of the
reflection curve in frame ∆. We tested our setup with
a variety of different lenses and were always able to
find an arrangement that produced such explicit re-
flection curves. We call this new measuring method
Inverse Deflectometry referring to the related clas-
sic Deflectometry (Knauer et al., ; Kaminski, 2008;
Knauer, 2006; Werling et al., 2007). In contrast to
this method we do not project a dense pattern onto
the measuring object and directly observe the distor-
tion on the surface. We instead capture the reflection
pattern on a screen and infer the shape from this in-
direct measurement. This enables us to clearly sepa-
rate the reflections from different sides of the lens en-
abling us to conduct a nondestructive measurement.
For the setups presented in this paper we filtered the
camera images to remove backface reflections prior
to line extraction. Another important difference is that
our method generates an actual surface reconstruction
whereas the direct deflectometirc method produces a
normal field.
3.2 Scan Simulation
Our reconstruction method is an analysis-by-
synthesis approach. We use a parametrized geometric
Reflective Surface Reconstruction from Inverse Deflectometric Measurements
77

Screen
Laser
Camera
Lens
(a) Measurement setup
S
a
n
s
n
l
r
0
n
r
1
p
r
2
Laser Lens Screen Camera
Planar Spotlight Bi-cubic B-spline
Plane Pinhole Camera
(b) Measurement setup sketch
Camera y
Camera x
∆
Measuring step
(c) Sample measurement result
Figure 1: Subfigure (a) depicts the proposed setup. (b) is a sketch of the same setup with annotated parts. In the top row the
real-world objects are listed, on the bottom we show the corresponding models used for simulation. (c) shows an exemplary
result of a measuring drive. The individual measurement steps represent a single column in the image with the y-coordinate
of the reflection lines represented by colors.
surface model to simulate the acquisition process
and optimize the surface parameters to reproduce the
presented measurement. We model the screen as a
plane and use an extended pinhole model to simulate
the camera and account for lens distortion during
acquisition by undistorting the camera images before
extracting measurement data.
The surface description is a vital part of the re-
construction and should be chosen carefully to en-
sure a high-quality reconstruction while simultane-
ously retaining decent runtimes. In particular, the
model should require as few codependent parameters
as possible. Besides this, our use case requires that the
mean curvature is well defined on the entire surface.
Based on these preconditions we choose an ex-
plicit uniform bi-cubic B-spline S (Farin, 2002) as the
geometric surface model. S is defined by height val-
ues h
i j
arranged on a regular m × n grid h and two
associated knot-vectors. To form an explicit repre-
sentation of the surface, the knots are chosen such
that the xy-coordinates are always equivalent to uv-
coordinates on the B-spline domain. The z-coordinate
of a surface point is given by a convex combination of
the height values:
S(uv, h) =
∑
i, j
w
i j
(uv)h
i j
= w(uv)
T
h (1)
w
i j
(u,v) is the product of the bi-cubic B-spline basis
functions described in (Farin, 2002). We drop the ar-
guments for brevity if they are unambiguous. Note
that the local support of the B-spline basis functions
implies that only 16 coefficients are nonzero for any
point on the surface. Fig. 1b shows a sketch of the
proposed setup including real world hardware and as-
sociated virtual models used during simulation.
3.3 Optimization
Let R be a subset of all rays emitted by the laser. By
tracing one of these rays r ∈ R through the measuring
setup, using the surface S, parameterized by the con-
trol points h, and a lens offset ∆, we find the corre-
sponding simulated measurement q(r, h) on the cam-
era chip. Using this simulation, we can formulate an
intuitive error term:
E
R
(h,M) =
1
2
∑
r∈R
|
M(q(r, h)
x
, ∆) − q(r, h)
y
|
γ
(2)
Here M(row,column) is an image access and | · |
γ
is a
stable norm-like function (e.g. Huber-norm).
There are however some major drawbacks to this
formulation. During optimization each ray has to be
intersected with the surface. For a general bi-cubic
B-spline this is most efficiently done with an iterative
process, which is still relatively slow, and an analyt-
ical derivation of this process is nontrivial. Finally,
many of the rays may not even hit the surface and
therefore do not add any information to the optimiza-
tion.
We thus propose a novel optimization scheme,
that measures the error by sampling the surface S di-
rectly. Since this is the domain of the optimization
target we will only generate meaningful residuals and
do not waste computation time for ray surface inter-
section. The line laser emits a planar bundle of rays
and we can easily compute the advance ∆ and ray
r, required for simulating the measurement, given a
sample uv on S:
∆(uv) = −
n
T
l
S(uv) + d
l
n
T
l
a
(3)
r(uv) = (o
l
, S(uv) − o
l
) (4)
Where o
l
, n
l
and d
l
define the laser and a is the dis-
placement vector of the lens between two consecutive
frames. The error term using surface samples is very
similar to Eq. 2:
E
S
(h,M) =
1
2
∑
uv
|
M(q(r, h)
x
, ∆ − q(r, h)
y
|
γ
(5)
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
78

Lens Ground Truth Reconstruction Error
PAL
−30
−20
−10
0
10
20
30
v[mm]
−30 0 30
u[mm]
+1.0
+2.0
+3.0
+4.0
Dioptre
−30
−20
−10
0
10
20
30
v[mm]
−30 0 30
u[mm]
0.0
+0.1
+0.2
+0.3
+0.4
+0.5
+0.6
+0.7
+0.8
Dioptre Error
Spherical
−30
−20
−10
0
10
20
30
v[mm]
−30 0 30
u[mm]
+3.0
+4.0
+5.0
+6.0
Dioptre
−30
−20
−10
0
10
20
30
v[mm]
−30 0 30
u[mm]
0.0
+0.1
+0.2
+0.3
+0.4
+0.5
+0.6
+0.7
+0.8
+0.9
+1.0
Dioptre Error
(a) Ground truth error. (b) Simulation error.
Figure 2: (a) displays the divergence of reconstructed and ground truth diopter over the surface. (b) depicts the value of the
objective function without the smoothing term.
Since lenses are smooth, we encourage smooth-
ness by adding the thin plate energy term to the ob-
jective function:
Φ
TP
(h) =
Z
Ω
(S
2
uu
(uv) + 2S
2
uv
(uv) + S
vv
(uv)
2
) duv
(6)
Here S
uu
, S
uv
and S
vv
are the second derivatives of the
bi-cubic B-spline S. This energy function is often
used when working with splines, e.g. for mesh fair-
ing (Greiner, 1994) or data approximation (Bookstein,
1989). Combining this regularization with the orig-
inal simulation error yields the final objective func-
tion:
argmin
h
E
S
+ λ
TP
Φ
TP
(7)
We can solve this optimization problem using
standard nonlinear solvers (e.g. LM (More, 1977))
which require partial derivatives for the objective
function. Eq. 3 is based on ray tracing which is a
recursive method. For each ray intersection we only
require knowledge of the incoming ray and some pa-
rameters specific to the current intersection (e.g. sur-
face normal for reflection or implicit plane equation
for ray-plane intersection). Essentially, the new ray is
given by r
i+1
= f (r
i
, h) and we can apply the chain
rule to obtain the derivative:
∂r
i+1
∂h
=
∂ f
∂r
i
∂r
i
∂h
(8)
To provide all data required for optimization, we
extend the classic ray definition by the partial deriva-
tives of origin and direction. Eq. 3 implies that the
lens offset ∆ depends on h. We therefore add it to the
ray data leading to a sextuple describing a ray r:
r =
o, d, ∆,
∂o
∂h
,
∂d
∂h
,
∂∆
∂h
(9)
Directly sampling the surface implies that the deriva-
tive of the initial ray
∂r
0
∂h
solely depends on the B-
spline weights w:
∂r
0
∂h
(uv) = (0, w) (10)
The derivative is constant throughout optimization
and we therefore can precompute the structure of the
sparse Jacobian matrix. This is another advantage of
the proposed sampling strategy over using a fixed set
of rays. If the optimization is set up according to Eq. 2
each residual will produce a different surface sample
in each iteration potentially changing the influenced
control points and therefore the structure of the Jaco-
bian.
3.4 Results
To demonstrate our method we show the results of
two measured lenses: a simple spherical lens and
a custom designed PAL. Fig. 2a shows the result-
ing deviations from the ground truth captured via
the phase measuring deflectometric method (PMD)
(Knauer, 2006). We blacked and roughed the front
faces of the glasses to capture the ground truth. For
the PAL we started optimization from a sphere with
a radius corresponding to the far sight region of the
lens. For the spherical lens we started from a plane.
The presented results show that the optimization
converges to a low simulation error (see Fig. 2b), but
the recovered surface is not sufficiently accurate. In
the following we analyze the reasons for this insuffi-
cient accuracy.
A major hurdle for most reconstruction methods
based on reflection patterns is the height ambiguity,
as described in (Knauer, 2006). The problem is vi-
sualized in Fig. 3: Given a single ray r and its mea-
Reflective Surface Reconstruction from Inverse Deflectometric Measurements
79

r
0
r
1
n
0
= n
1
n
0
n
1
M(r
0
)
M(r
1
)
Figure 3: Depiction of the height problem and how it is
resolved with a parameterized surface. Along a single ray
(e.g. r
0
) we can always derive a normal to reflect it towards
the measurement. For two rays however, there is only one
feasible plane.
surement M(r) we can choose an arbitrary point on r
and derive a normal that reflects the ray towards its as-
signed target. This ambiguity is a difficult challenge
for many deflectometric methods since the number of
solutions is infinite and the uncoupled ray measure-
ments have to be combined without physical reason-
ing.
Our method, in contrast, by construction intro-
duces plausible dependencies between rays by inter-
secting them with a common surface. Fig. 3 shows
that this implicitly solves the height ambiguity for the
simple case of a planar surface. We need at least two
rays to construct a well determined system since each
ray creates two residuals in Eq. 5 and a plane is de-
fined by four parameters. This reasoning transfers
to bi-cubic B-spline surfaces used in our method, as-
suming that the B-spline is sufficiently variable to de-
scribe the actual lens. Since the B-spline represen-
tation has a local support it is important to sample
the entire domain to create a well-defined optimiza-
tion problem. We directly sample the surface to gen-
erate residuals for the optimization and therefore can
ensure this easily.
The second source of ambivalence in our setup
is the matching of rays to point along the measured
curves. Inspecting the simulated reflection lines using
the final optimization result implies that this is indeed
a major problem. The optimization tends to generate
reflection curves that are shorter than the measured
lines and only cover a subsegment. As seen in Fig. 2b
the simulation error still diminishes since Eq. 5 en-
forces that the simulated line is on the measured line
but does not require complete coverage. Experiments
to add an error term to enforce total line coverage
were not successful. We therefore propose to intro-
duce a mapping from rays, produced by the laser, to a
position on the reflected line.
(Wedowski et al., 2012) follow a similar idea
where they directly map the simulated to measured
reflection. Since they start their reconstruction from
an initial photometric scan, they assume that the sim-
ulation is already very similar to the measurement and
linearly map line segments between distinctive points.
We strife to provide a reconstruction method without
any specific initial guess. In the following we there-
fore change our first setup slightly to provide the ray-
measurement matching directly.
4 DOT LINE MEASUREMENT
4.1 Setup Modification
There are many possibilities to introduce ray-
measurement correspondence to the measurement.
We propose to replace the continuous line laser with
a laser producing a dotted line. Many of these lasers
provide a recognizable center ray (e.g. using a big-
ger radius) and we can from there infer the remaining
points by simply counting the distance to the center
ray. The measurement output changes slightly: In-
stead of a height field of stacked lines we use an image
of size |dots| × |images| where each entry stores the
pixel position where the corresponding dot is detected
in by camera. See Fig. 4 for an exemplary measure-
ment. We update the simulation error to accommo-
date for the new data:
ˆ
E
S
(h,M) =
1
2
∑
uv
d (M(r,∆) − q(r, h)) (11)
Where M(row, column) is once again an image ac-
cess and d(·) is an appropriate distance function (e.g.
squared L
2
norm). Given this new measurement data
we can now also work with loops, assuming the mea-
surement can handle them, since the pixel coordinates
are now completely separate from the measurement
domain.
The modified setup replaces continuous line sam-
ples with a discrete sampling of the reflection pat-
tern. Therefore, the laser rays, present in the real-
world measurement, also samples the lens surface at
830
Pixel Coordinate
570
X-Coordinate Y-Coordinate
Dot Index
Lens o ff set ∆
Dot Index
Lens offset ∆
Figure 4: An exemplary new measurement with pixel coor-
dinates displayed separately and color-coded.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
80

(a) Mean absolute diopter difference to ground truth. (b) Simulation error E
S
as defined in Eq. 11.
Figure 5: Ground truth and simulation error for a variety of lenses and sample rates.
discrete positions. Our optimization chooses random
points on the spline domain and therefore will fre-
quently trace rays not present in the measurement. To
generate an accurate reconstruction, it is paramount to
find a good estimate of the reflection pattern for these
unseen rays. Depending on the distance between
consecutive measurement points commonly used lin-
ear interpolation might not be sufficient. We instead
opted for a bicubic interpolation of the measurement
since the reconstructed lenses are very smooth and
therefore also create a smooth reflection pattern. As
we will show in the following chapter this interpo-
lation method produces better results, especially for
coarser sample patterns compared to linear interpola-
tion.
4.2 Results
To thoroughly evaluate the behavior of our method
we used a simulated environment where we can easily
test many different parameters of the setup. To eval-
uate the behavior of the reconstruction with different
sampling rates we simulated several PAL designs (de-
noted as freeform) and spherical lenses ranging from
negative to highly positive diopter values. The recon-
struction progress always started from a plane. Re-
sults are summarized in the plots of Fig. 5.
We successively increased the angle between rays
produced by the laser which leads to increasing
spread of scanned points on the lens. The sample dis-
tance ranges from an average of 0.08 mm to 4.22 mm.
As expected, we can use a much wider spread of laser
rays for spherical lenses compared to PALs. For the
latter surfaces we could potentially loose details that
are small enough to fit in the gap between the discrete
data points. Note that the simulation error for PAL
surfaces is generally higher. The reason is twofold,
first the smoothing term Eq. 6 prevents overfitting to
the measurement. On the other hand, the reflection
curve produced by a PAL is less smooth in compari-
son to a spherical lens resulting in a larger interpola-
tion error.
Fig. 6 shows some exemplary reconstructions
starting from a plane. The sample rate was chosen
to generate an average dot sample distance of 2mm.
Larger deviations from the ground truth are primar-
ily located at fringes of the lens. To represent the
entire lens surface with the B-spline, we chose a do-
main larger than the actual lens and cut out the spher-
Lens Ground Truth Reconstruction Error Thinplate Error
PAL
Spherical
Figure 6: Reconstruction results for exemplary lenses. The
reconstruction error ist the absolute difference to the ground
truth and clamped to 0.1 dioptre.
Reflective Surface Reconstruction from Inverse Deflectometric Measurements
81

ical shape. This implies that fewer residuals are cre-
ated for control points near the border of the lens
and the smoothing term has a larger influence lead-
ing to worse reconstruction. However real measure-
ments tend to create very noisy and inaccurate mea-
surements near the edge of the lens. These error result
from inter reflections or rough surface on the edges,
such that we decided not to reduce the influence of
the smoothing term towards the fringes.
As mentioned in Sect. 4.1 we assume that the
interpolation of the sparse measurements has a pro-
found impact on the final reconstruction. To ver-
ify this, we compared the bicubic and bilinear inter-
polation of M for different sample rates. The first
method results in a smooth function even at pixel bor-
ders, whereas the linear interpolation can cause G1-
discontinuities. The top plot in Fig. 5a shows that the
bicubic interpolation is generally the superior interpo-
lation method especially for freeform surfaces with a
lower sample rate. For higher sample rates however,
the linear interpolation is also a good approximation.
Finally, we study the convergence rate of the op-
timization procedure in the second row of Fig. 5.
The simulation and ground truth error behave simi-
lar and only change insignificantly for the first fifteen
to twenty iterations for the simulated objects.
5 CONCLUSION AND FUTURE
WORK
We presented two setups to reconstruct a lens sur-
face from its reflection pattern. We have shown that
a continuous line, used in the first setup, produces
reconstructions of inadequate accuracy for quality
control. However, the proposed optimization frame-
work and setup was adapted to explicitly provide
ray-measurement correspondences. The optimiza-
tion framework is agnostic to the actual measurement
technique, if a mapping from the surface point to the
space of the light source is available. In future work
we will try different types of lasers that directly en-
code the angle along the ray (e.g. using phase encod-
ing) and evaluate if the denser measurements signifi-
cantly impact reconstruction quality.
In this paper we explicitly filtered secondary re-
flections to stick to a simple light path with a single
reflection at the initial surface. We therefore require
two scans to fully capture a single lens. The presented
framework can be extended easily to more complex
paths with multiple surface interactions. We will in-
corporate this into our method to simultaneously cap-
ture both sides of a PAL in a single measurement.
Although the reconstruction time of around 2 min-
utes is short enough to include the method as a qual-
ity assurance tool into an existing production line, we
would like to speed up the process. Since the simula-
tions of the individual laser rays, done during residual
computation, are independent, we anticipate a mean-
ingful speedup by implementing a GPU based version
of our algorithm.
ACKNOWLEDGEMENTS
This research is funded by Bayerische Forschungss-
tiftung ”Schritthaltende 3D-Rekonstruction und -
Analys (AZ-1184-15)” (For3D). The lenses and PALs
are provided by our project partners Rupp+Hubrach
Brillenglas.
REFERENCES
Agarwal, S., Mierle, K., and Others. Ceres solver.
http://ceres-solver.org.
B
¨
ohm, W. (1977). Cubic b-spline curves and surfaces
in computer aided geometric design. Computing,
19(1):29–34.
Bookstein, F. L. (1989). Principal warps: thin-plate splines
and the decomposition of deformations. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
11(6):567–585.
Chamadoira, S., Blendowske, R., and Acosta, E. Progres-
sive addition lens measurement by point diffraction in-
terferometry. OPTOMETRY AND VISION SCIENCE,
89(10):15321542.
Farin, G. (2002). Curves and Surfaces for CAGD: A Prac-
tical Guide. Morgan Kaufmann Publishers Inc., San
Francisco, CA, USA, 5th edition.
Greiner, G. (1994). Variational Design and Fairing of Spline
Surfaces. Computer Graphics Forum, 13(3):143–154.
Halstead, M. A., Barsky, B. A., Klein, S. A., and Mandell,
R. B. (1996). Reconstructing curved surfaces from
specular reflection patterns using spline surface fitting
of normals. In Proceedings of the 23rd Annual Con-
ference on Computer Graphics and Interactive Tech-
niques, SIGGRAPH ’96, pages 335–342, New York,
NY, USA. ACM.
Hocken, R. and Pereira, P. (2011). Coordinate Measuring
Machines and Systems, Second Edition. CRC Press.
Kaminski, J. (2008). Geometrische Rekonstruktion spiegel-
nder Oberfl
¨
achen aus deflektometrischen Messdaten.
PhD thesis, FAU Erlangen N
¨
urnberg.
Kaminski, J., Lowitzsch, S., Knauer, M. C., and H
¨
ausler, G.
(2006). Full-field shape measurement of specular sur-
faces. In Osten, W., editor, Fringe 2005, pages 372–
379, Berlin, Heidelberg. Springer Berlin Heidelberg.
Knauer, M. (2006). Absolute Phasenmessende Deflektome-
trie. PhD thesis, FAU Erlangen N
¨
urnberg.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
82
Knauer, M., Kaminski, J., and H
¨
ausler, G. Phase measur-
ing deflectometry: a new approach to measure specu-
lar free-form surfaces. In editor, editor, Proceedings
of SPIE - The International Society for Optical Engi-
neering, volume 5457.
Loos, J., Greiner, G., and Seidel, H.-P. (1998). A variational
approach to progressive lens design. Computer-Aided
Design, 30(8):595 – 602.
More, J. (1977). Levenberg–marquardt algorithm: imple-
mentation and theory. Numerical analysis, 630.
Moreno, D. and Taubin, G. (2012). Simple, accurate, and
robust projector-camera calibration. In 2012 Second
International Conference on 3D Imaging, Modeling,
Processing, Visualization Transmission, pages 464–
471.
Rahmann, S. and Canterakis, N. (2001). Reconstruction
of specular surfaces using polarization imaging. In
Proceedings of the 2001 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition.
CVPR 2001, volume 1, pages I–149–I–155 vol.1.
Richter, C., Kurz, M., Knauer, M., and Faber, C. (2009).
Machine-integrated Measurement of Specular Free-
formed Surfaces Using Phase-measuring Deflectom-
etry, vol. 6. EUSPEN 2009.
Sorkine, O. (2005). Laplacian Mesh Processing. In
Chrysanthou, Y. and Magnor, M., editors, Eurograph-
ics 2005 - State of the Art Reports. The Eurographics
Association.
Tan, C.-T., Chan, Y.-S., Lin, Z.-C., and Chiu, M.-H. (2011).
Angle-deviation optical profilometer. Chin. Opt. Lett.,
9(1):011201.
Wang, S.-W., Shih, Z.-C., and Chang, R.-C. (2002). An ef-
ficient and stable ray tracing algorithm for parametric
surfaces. J. Inf. Sci. Eng., pages 541–561.
Wedowski, R., Atkinson, G., Smith, M., and Smith, L.
(2012). Dynamic deflectometry: A novel approach
for the on-line reconstruction of specular freeform sur-
faces. Optics and Lasers in Engineering, 50:1765–
1778.
Werling, S., Balzer, J., and Beyerer, J. (2007). A new ap-
proach for specular surface reconstruction using de-
flectometric methods. In Informatik 2007 - Informatik
trifft Logistik. Bd.1. Hrsg.: R. Koschke, volume 109 of
GI-Edition / Proceedings, pages 44–48. Gesellschaft
f
¨
ur Informatik, Bonn.
APPENDIX
The integral part of our reconstruction method is trac-
ing a single ray through the acquisition geometry and
the derivative of this path according to the B-spline
height values h. In this appendix we present the for-
mulas and derivatives needed to construct most paths
present in a real-world setup. We will use the short-
hand f
x
for
∂ f
∂x
for brevity in this appendix.
Both reflection and refraction require the nor-
malised normal at a point (u,v) on the B-spline do-
main. The normal is easily derived since we chose an
explicit version of the B-spline:
n =
−S
u
−S
v
1
T
−S
u
−S
v
1
(12)
We define l =
−S
u
−S
v
1
, w
u
and w
v
are
the derivatives of the B-spline basis functions with re-
spect to the indices.
n
h
=
w
T
u
w
T
v
0
l +
S
T
u
S
T
v
1
(S
u
w
u
+ S
v
w
v
)
l
2
(13)
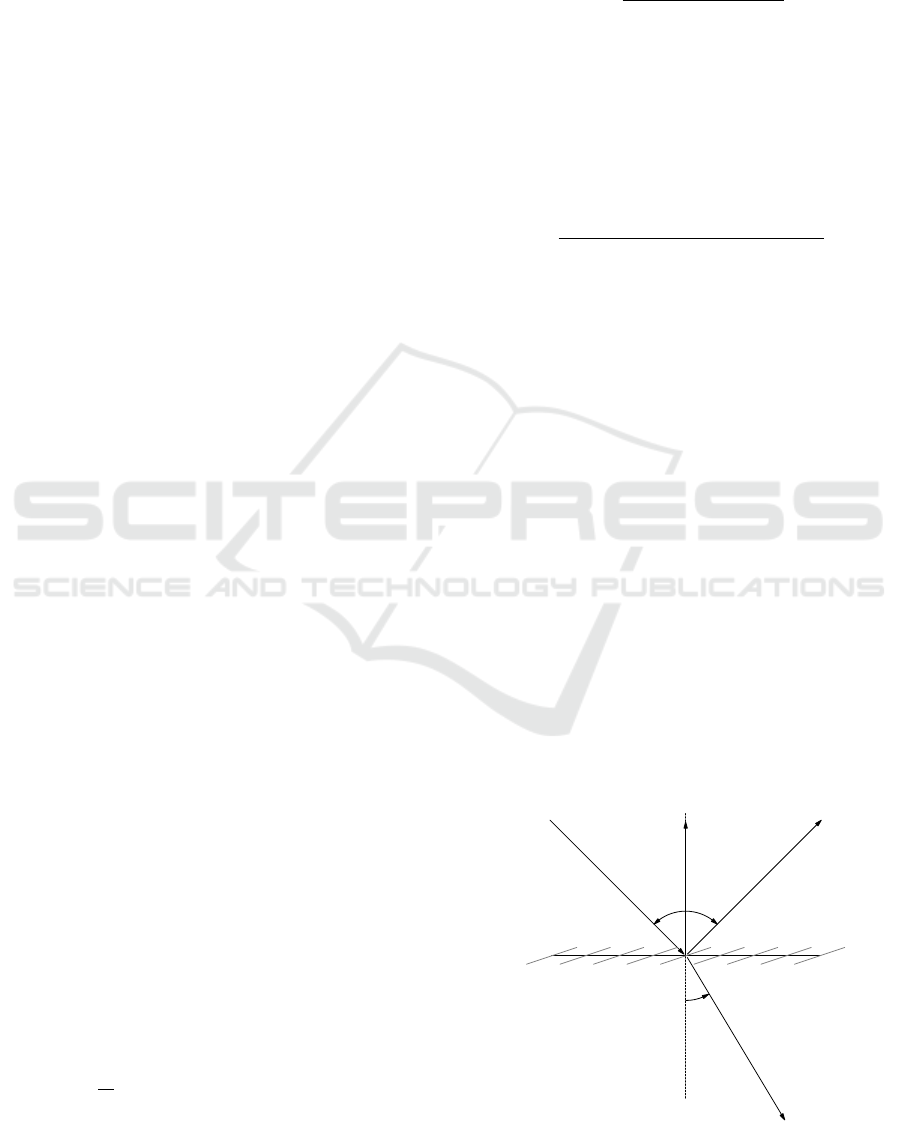
After a surface intersection the incoming ray i ei-
ther refracts into the surface (t) or gets reflected (r)
as shown in Fig. 7. In reality both cases will occur
but since only the shape of the resulting pattern is of
interest, we define a fix interaction type during opti-
mization. The cosine of the incident angle and its’
derivation is given by
cos(θ
i
) = −i
T
n
cos(θ
i
)
h
= −i
T
n
h
− n
T
i
h
(14)
From this the reflection direction is easily computed:
r = i + 2 cos(θ
i
)n
r
h
= i
h
+ 2(cos(θ
i
)
h
n + cos(θ
i
)n
h
)
(15)
The refractive indices of the two neighboring media at
the surface are needed to compute the refraction ray,
i
r
n
t
θ
i
θ
r
θ
t
η
1
η
0
Figure 7: Refraction and Reflection.
Reflective Surface Reconstruction from Inverse Deflectometric Measurements
83

which has the following form:
t =
η
1
η
2
i +
η
1
η
2
cos(θ
i
) −
q
1 − sin
2
(θ
t
)
n
t
h
=
η
1
η
2
i
h
+
η
1
η
2
cos(θ
i
)
h
+
sin
2
(θ
t
)
q
1 − sin
2
(θ
t
)
n
+
η
1
η
2
cos(θ
i
) −
q
1 − sin
2
(θ
t
)
n
h
(16)
with
sin
2
(θ
t
) =
η
1
η
2
2
(1 − cos
2
(θ
i
))
sin
2
(θ
t
)
h
= −2
η
1
η
2
2
cosθ
i
cos(θ
i
)
h
(17)
After the ray interacted with the lens, we have to
model the final two steps along the light path. The
first one is the point on the screen defined by the plane
n
T
S
p + d
S
= 0 (18)
where n
S
and p a point on the plane. If we insert a
point on the ray r into this equation we can compute
the intersection point s:
s = o − αd
s
h
= o
h
− dα
h
+ α − d
h
α =
n
T
S
o + d
S
n
T
S
d
α
h
=
(n
T
S
o
h
)(n
T
S
d) − (n
T
S
o + d
S
)(n
T
S
d
h
)
(n
T
S
d)
2
(19)
The final projection onto the camera image plane q
and subsequent dehomogenisation is given by:
q = KTs
q
h
= KTs
h
e
q =
q.x q.y
T
q.z
e
q =
q.z
q
H
.x q
H
.y
T
−
q.x q.y
T
q
H
.z
q.z
2
(20)
Where the camera intrinsics K and extrinsics T are
known. q.x refers to the x-component of the vector q
(equivalent for y and z)
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
84
