
Texture-based 3D Face Recognition using Deep Neural Networks for
Unconstrained Human-machine Interaction
Michael Danner
1,2
, Patrik Huber
1,3
, Muhammad Awais
1
, Zhen-Hua Feng
1
, Josef Kittler
1
and Matthias Raetsch
2
1
Centre for Vision, Speech & Signal Processing, University of Surrey, Guildford, U.K.
2
ViSiR, Reutlingen University, Reutlingen, Germany
3
Department of Computer Science, University of York, York, U.K.
Keywords:
Face Recognition, Deep Learning, 3D Morphable Face Model, 3D Reconstruction.
Abstract:
3D assisted 2D face recognition involves the process of reconstructing 3D faces from 2D images and solving
the problem of face recognition in 3D. To facilitate the use of deep neural networks, a 3D face, normally
represented as a 3D mesh of vertices and its corresponding surface texture, is remapped to image-like square
isomaps by a conformal mapping. Based on previous work, we assume that face recognition benefits more
from texture. In this work, we focus on the surface texture and its discriminatory information content for recog-
nition purposes. Our approach is to prepare a 3D mesh, the corresponding surface texture and the original 2D
image as triple input for the recognition network, to show that 3D data is useful for face recognition. Texture
enhancement methods to control the texture fusion process are introduced and we adapt data augmentation
methods. Our results show that texture-map-based face recognition can not only compete with state-of-the-art
systems under the same preconditions but also outperforms standard 2D methods from recent years.
1 INTRODUCTION
Recent developments in deep Convolutional Neural
Networks (CNNs) led to significant advancements in
the field of face recognition. For the case of frontal
face recognition, deep learning systems are already
outperforming humans. But recognition of non near-
frontal faces under uncontrolled imaging and illumi-
nation conditions still remains a challenge. The state-
of-the-art recognition systems mostly treat faces as
2D objects. These systems detect faces in an image
and then apply some kind of geometric transforma-
tion like rotation and translation on the 2D images,
and feed the resulting images as input to a CNN. We
will extend this input, as human faces are in reality
3D objects and consist of 3D shape and skin tex-
ture. There are some existing face recognition sys-
tems (Masi et al., 2016; Kittler et al., 2018; Koppen
et al., 2018) which take 3D shape of face into account
and synthesise frontal faces by using 3D information.
Kittler et al. (Kittler et al., 2018) have combined 3D
shape and texture information for face recognition
and have shown that the system benefits more from
texture than from shape. Motivated by their work,
in this paper we investigate different approaches to
improve a face recognition system based on texture
maps. We fit a 3D face model to 2D input images in
the wild in order to recover 3D shape and surface tex-
ture. We then transform 3D data to a 2D output image
by storing pose information in RGBA images, where
the alpha-values represent the view-angle of the face
to the camera for each pixel. The output of merging
texture maps are not a beauty contest for human eyes
to produce smooth facial texture but to augment the
dataset and provide the deep learning network with
discriminative information.
Using regular 2D images as input and output of
our preprocessing pipeline enables us to use common
face recognition datasets and allows us to exploit lat-
est CNN architectures. Last, we employ data augmen-
tation for training deep neural networks. We generate
additional training data by merging and blending face
textures of one subject from multiple images using
a quality-controlled fusion. We show that, with the
proposed face texture enhancements, our face recog-
nition pipeline achieves a performance comparable to
state-of-the-art 2D face recognition methods.
Figure 1 depicts the pipeline of our 3D assisted
2D face recognition system that has two main compo-
420
Danner, M., Huber, P., Awais, M., Feng, Z., Kittler, J. and Raetsch, M.
Texture-based 3D Face Recognition using Deep Neural Networks for Unconstrained Human-machine Interaction.
DOI: 10.5220/0008982504200427
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
420-427
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

nents: a) 3D assisted data processing, b) face recog-
nition engine based on 2D input. In this processing
step, we perform face and facial landmark detection
for a 2D image in the wild. We then reconstruct the
3D face of an input 2D image by recovering its 3D
shape and skin texture. This is achieved by fitting a
3D face model using 2D facial landmarks. The sur-
face face texture of the input image is remapped onto
a 2D isomap projection of the 3D mesh, to produce
texture maps. We choose to work with a rectangular
isomap projection that fills the whole space with pixel
information, so that it is especially amenable to con-
volutional processing. Every texture map is then anal-
ysed, rated, enhanced and augmented to train deep
CNNs.
The main goal of texture improvement is to en-
hance discriminatory information of skin texture of
3D faces by combining cues from multiple training
images. This leads to the following contributions
of the papers. First, to address shape distortions in
isomaps resulting from imprecise fittings, we pro-
pose geometric correction of texture maps. Second,
to fill missing texture values in isomaps due to large
non-frontal poses we propose texture merging. For
a smooth texture merging between different training
images of the same subject we propose a measure of
texture quality. Last, data augmentation plays a sig-
nificant role in training of CNNs, therefore, to train
deep CNN for face recognition we propose a 3D data
augmentation technique. For effective data augmen-
tation we utilised proposed texture quality measure
to merge and blend face textures of one subject from
multiple images. In the progress of this work we cre-
ate four variants of the CASIA dataset to enhance
training, which consist of (a) the unedited 2D skin
texture maps, (b) merged texture maps by an alpha
compositing algorithm, (c) merged texture maps by a
Poisson blending algorithm and (d) a dataset where
the original texture maps are aligned, warped and en-
hanced.
Figure 1: The proposed 3D assisted 2D face recognition
pipeline.
The face recognition training is evaluated on the
LFW (Huang et al., 2007) and IJB-A (Klare et al.,
2015) datasets and compared to conventional 2D face
recognition results. We carry out training on each
of the four texture map datasets using an Inception-
ResNet-v1 (Szegedy et al., 2017) architecture and
achieve competitive results. This has exceeded our
expectations greatly because extracting texture and
using a 2D isomap representation have little impact on
losing discriminative information for face recognition
tasks. Additionally, the consolidation of the four tex-
ture map datasets for an augmented training matches
state-of-the-art performance.
The remainder of this paper is structured as fol-
lows: In Section 1, we discuss related work on the
development of face analysis, deep learning and 3D
assisted face recognition. In Section 2, we show an
overview of the proposed framework and introduce
our methodology including texture map rating, recon-
struction and augmentation. We subsequently report
our experimental results on 2D image datasets in Sec-
tion 3 and conclude in Section 4.
Related Work. This section presents a short intro-
duction to the literature relevant to tackling the 3D
assisted face recognition problem.
Wang et al. (Wang et al., 2014) present a de-
tailed overview of facial landmarks localisation meth-
ods. Current landmark detection methods are ei-
ther model-based (Cootes et al., 2001) or regression-
based (Doll
´
ar et al., 2010) (Feng et al., 2015) (Feng
et al., 2018). The model-based methods create a rep-
resentation of the shape during training and use the
shape to fit faces during testing. Popular frameworks
include 3D Dense Face Alignment (3DDFA) (Zhu
et al., 2016) in which a dense 3D face model is fitted
to the image with a CNN model, and Pose-Invariant
3D Face Alignment (Jourabloo and Liu, 2017) that
estimates both 2D and 3D landmarks by integrating
a 3D point distribution model. Zhang et al. (Zhang
et al., 2014) used a cascade of several successive
stacked auto-encoder networks that refines the coarse
locations obtained from the first stacked auto-encoder
network.
Bulat et al. (Bulat and Tzimiropoulos, 2017)
first roughly rotated each set of facial landmarks
and then refined the detection results. In 2018,
Feng et al. (Feng et al., 2018) introduced a new loss
function, namely Wing loss, for facial landmark local-
isation with CNNs. The landmark detectors used in
this work for 2D images and for texture isomaps are
based on the methods of Bulat et al.and Feng et al..
Ding et al. (Ding and Tao, 2016) describe differ-
ent pose-invariant face recognition (PIFR) algorithms
Texture-based 3D Face Recognition using Deep Neural Networks for Unconstrained Human-machine Interaction
421

and stated PIFR as crucial to realise the full potential
of face recognition for real-world applications. They
classify exsiting PIFR algorithms into four categories:
pose-robust feature extraction, multi-view subspace
learning, face synthesis and hybrid approaches.
Dataset augmentation techniques are transforma-
tions that are applied to images without changing the
containing face’s identity. Such methods are known
to improve the performance of CNN-based meth-
ods and prevent over-fitting (Chatfield et al., 2014).
Masi et al. (Masi et al., 2016) suggest a much more
sophisticated technique to augment a generic face
dataset. Their approach is to synthesise new face im-
ages, by creating face specific appearance variations
in pose, shape and expression.
2 METHODOLOGY
The aim of this work is to investigate the merit of us-
ing 3D models and 2D reconstructed faces from 3D
models for 2D face recognition. This requires a rep-
resentation that recovers both 3D shape and texture
information from a 2D image, as well as the ability
to extract powerful features from this representation
using CNNs.
The first step of the proposed pipeline in Figure 1 is
to detect facial landmarks in an input image using the
wing loss (Feng et al., 2018). We then fit a 3D Mor-
phable Face model (3DMM) to the landmarked im-
age using the algorithm and open-source software de-
scribed in (Huber et al., 2016). As 3DMM, we opt
for the Surrey Face Model, which is a compact PCA
based representation of 3D face variability, learned
from a set of 3D face scans, and consisting of sepa-
rate shape and texture parts.
Every vertex in a 3D mesh stores a spatial coordinate
(x,y,z) and a texture coordinate (u,v). The UV co-
ordinates form a 2D embedding of the 3D vertex co-
ordinates to store the texture in an image form. Such
a generic representation of the face texture is created
with an algorithm for rectangular texture maps that
finds a projection from the 3D vertices to a 2D plane
that preserves the geodesic distance between the mesh
vertices. We follow the method for performing these
steps described in (Kittler et al., 2018). As advocated
in (Kittler et al., 2018), we use a conformal Lapla-
cian Eigenmap where the boundary vertices are con-
strained to a square, as shown in Figure 2, calling
it square texture map. The texture map contains the
remapped texture of the original 2D image, preserv-
ing all details.
Although the accuracy of facial landmarking is very
high with CNN-based landmark detectors, there are
Figure 2: 3D face shape and constrained Laplacian square
texture map.
still some images with incorrect landmark points, pro-
ducing variations in the quality of the resulting tex-
ture maps. The pose of a face also affects the qual-
ity of the remapped texture, at least in parts of the
face. This paper focuses on the problem of texture
map enhancement as a basis for improved 3D assisted
2D face recognition performance.
2.1 Square Texture Map Quality
Assessment
Although intuitively appealing in principle, a practi-
cal realisation of having surface texture is challeng-
ing because the 3D reconstruction from 2D projec-
tions is prone to errors. This leads to texture distor-
tion, which is reflected in degraded recognition per-
formance. We propose two skin texture enhancement
methods to rectify the problem: a geometric correc-
tion to counteract the shape distortion, and texture
merging to fill texture holes caused by pixel visibility
issues in non-frontal poses. We propose a measure of
texture quality and use it to control the texture fusion
process.
To measure the quality of square texture maps we
propose a number of different criteria:
Pose Rating. The visible area of a face depends on
pitch, yaw and roll of the face from the camera per-
spective. A face that is directed to the camera gives us
more texture information than a face that turns away
from the camera. Also the probability of detecting
better landmarks is higher on a frontal face. An im-
age has n rows and m columns. Every pixel p
i j
con-
sists of red, green, blue and alpha values ranging from
0 to 255. The alpha value represents the angle to the
camera for each pixel, by mapping angle of 0 to 90 de-
grees to values from 255 to 0. The pose rating value
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
422
P is the sum of all alpha values α
i j
for all pixels, di-
vided by the number of pixels and the maximum alpha
value:
P =
∑
n−1
i=0
∑
m−1
j=0
α
i j
n · m · 255
. (1)
Overall Histogram Rating. The histogram of the
texture map tells a lot about the image quality. At
first the image is transformed into a grey-scale im-
age based on the RGB values from 0 to 255 per pixel.
The histogram is a discrete function h(r
k
) = n
k
, where
r
k
is the kth grey level and n
k
is the number of pix-
els in the image having grey level r
k
(Gonz
´
alez and
Woods, 2008). The next step is to find the maxi-
mum value max of n
k
and calculate normalised values
p
k
= n
k
/max. The values r
0
(black) and r
255
(white)
will not be counted to compute the rating H
image
since
these values represent the pixels of the face’s invisible
areas. The final rating is given by:
H
image
=
∑
254
k=1
p
k
254
. (2)
H
image
represents a measure of the overall histogram
rating of the distribution of tones. A wide distribu-
tion is an indicator for rich information content in the
image. Peaks in the histogram are often detected in
blurry or badly aligned texture maps.
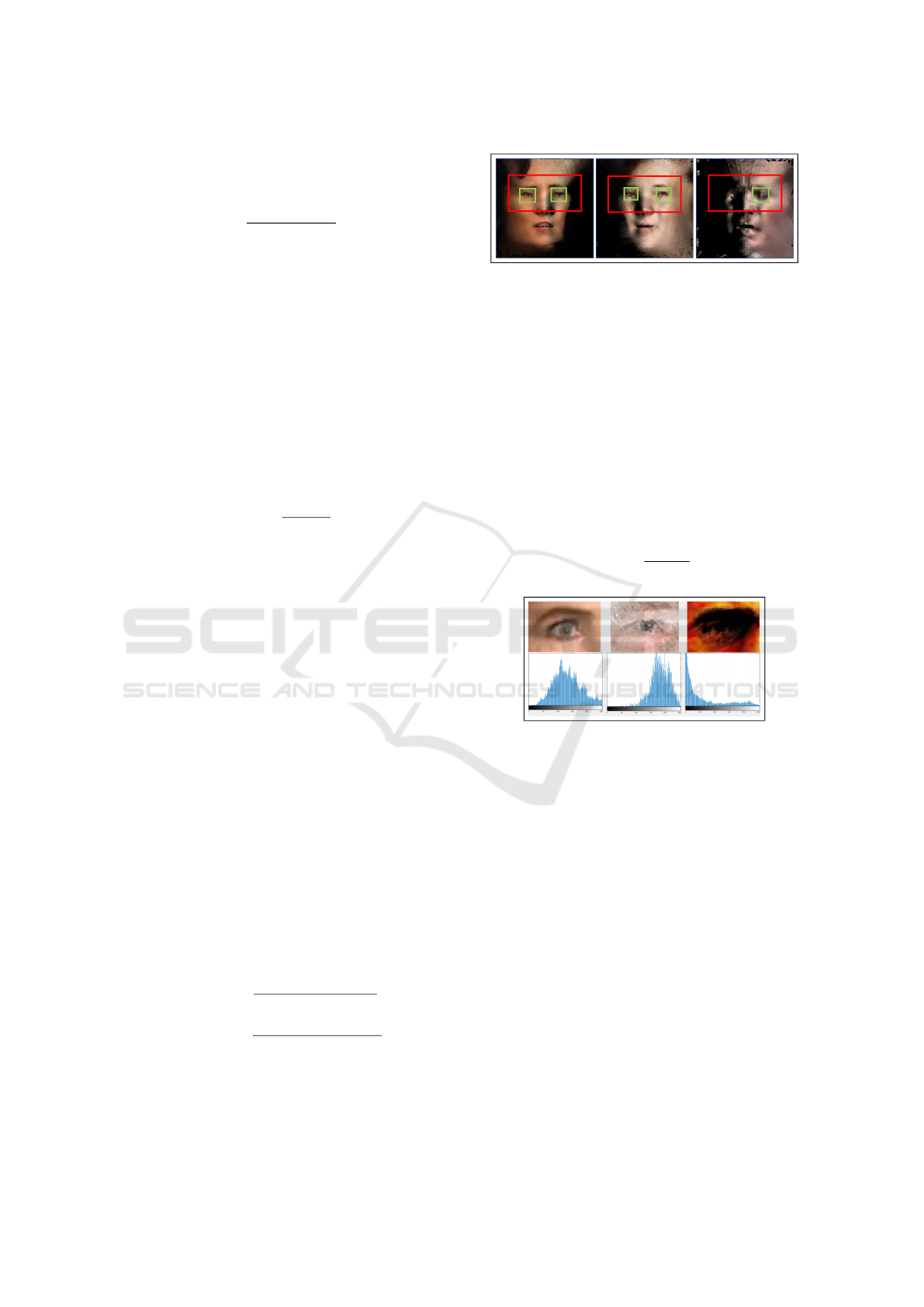
Eye Position. We run an eye detector on the tex-
ture map in the expected area of the eyes. We define a
score function that will be high if the detected position
is exactly where an eye should be in the texture map,
since the texture map is aligned. The higher the devi-
ation of the eye position, the worse the rating. For the
texture maps of a size 224 x 224 pixels we determined
optimal coordinates for the left (p
lx
, p
ly
) and the right
eye (p
rx
, p
ry
). Figure 3 shows some eye detection re-
sults inside the search area (red rectangle). The green
rectangles stand for the detected eye positions. We
take the centres of green rectangles as left and right
eye positions l
x
, l
y
, r
x
, r
y
and calculate the rating E
le f t
and E
right
. The difference between the detected and
the model eye coordinates is then divided by a factor
N, that defines when a deviation measures reaches the
value 0. We experimentally determined N = 40 to be
a good value for an image size of 224x224.
E
le f t
= 1 −
|l
x
− p
lx
| + |l
y
− p
ly
|
N
(3)
E
right
= 1 −
|r
x
− p
rx
| + |r
y
− p
ry
|
N
(4)
Since there are images with eye occlusion like
sunglasses and profile images with only one eye vis-
ible, the rating of an undetected eye will be excluded
from the overall score.
Figure 3: The green rectangles show the detected eyes
found inside the red area.
Eye Detection Weight and Eye Histogram. E
detect
is the value returned from the eye detector, for the
probability of a detected eye, ranging from 0 to 1.
Like the overall histogram rating, a histogram of the
pixels in the area of the detected eyes will be analysed
and rated as H
eye
. If there are two eyes, the histogram
will be combined, if there is no eye detected, the rat-
ing will be omitted and does not influence the overall
score. Figure 4 shows the histogram charts for three
different eyes, the score is likely to be higher, if the
histogram values are evenly distributed and calculated
by:
H
eye
=
∑
254
1
p
k
254
(5)
Figure 4: Eye histogram charts of different quality levels.
Overall Rating. The overall rating R is the average
of all calculated values, which can consist of a maxi-
mum number of six ratings when both eyes have been
detected. For the histogram and pose ratings the ad-
ditional parameters have been determined during test
runs with representative images.
2.2 Texture Map Reconstruction
To reconstruct self-occluded face parts and to improve
the quality of the texture maps, we build a system for
face texture improvement.
Deep Neural Network for Texture Map Land-
marks. As a first step of the system, we train a CNN
for landmark detection in texture maps. The net-
work is build on the Face Alignment Network of Bu-
lat et al. (Bulat and Tzimiropoulos, 2017), which uses
a stack of four Hourglass networks combined with a
Texture-based 3D Face Recognition using Deep Neural Networks for Unconstrained Human-machine Interaction
423
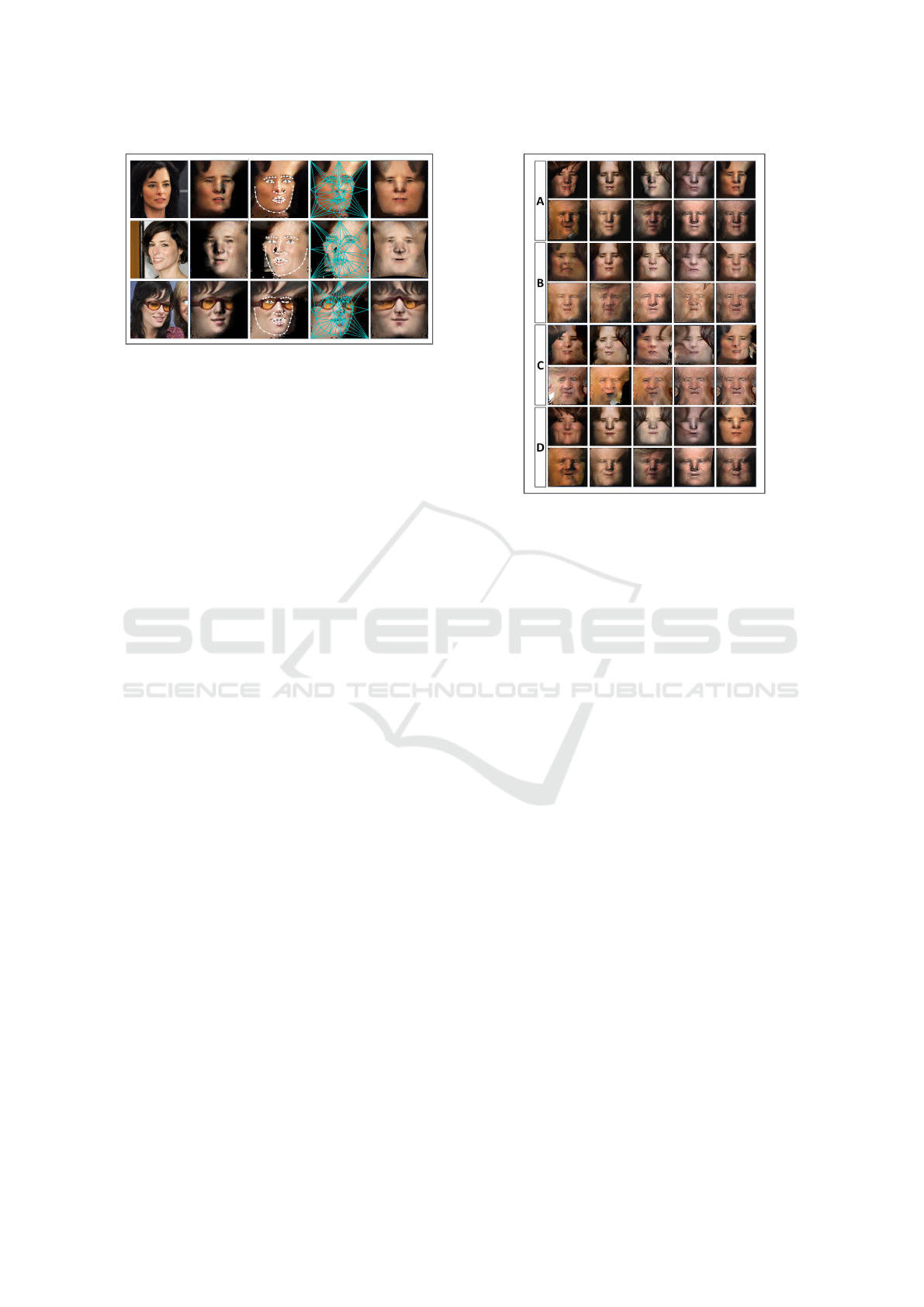
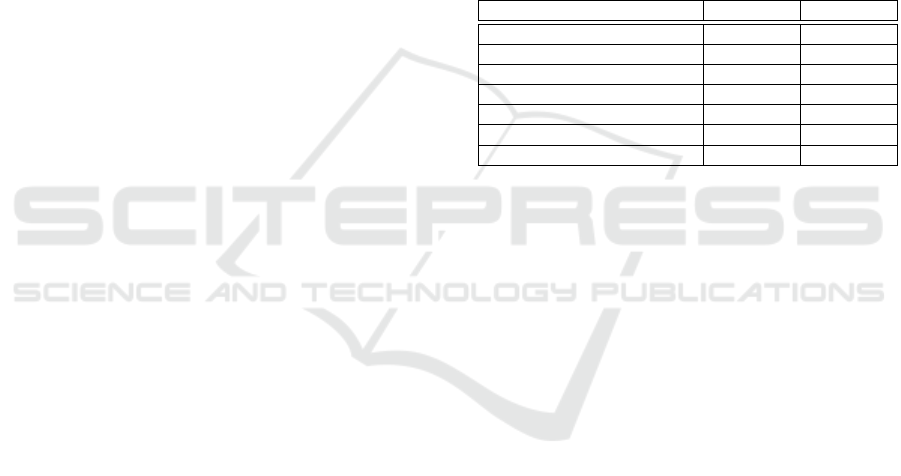
Figure 5: Texture Map Reconstruction. Left to right: CA-
SIA WebFace image, input texture map, facial landmarks,
Delaunay triangulation, enhanced output texture map.
hierarchical, parallel and multi-scale block. The net-
work has been trained on about 5,000 manually anno-
tated texture maps of the CASIA WebFace dataset.
Face Texture Alignment. The face texture align-
ment is based on a warping algorithm that uses facial
landmarks and Delaunay triangulation. We use the 68
facial landmark points and eight points on the bound-
ary of the texture map to calculate a Delaunay trian-
gulation, which is used to break the texture into trian-
gles. Having the 68 facial landmark coordinates of the
defined texture map of the Surrey Face Model, com-
bined with a standard Delaunay triangulation, these
triangles can be used to calculate a 2 × 3 matrix M of
an affine transformation for each triangle so that:
x
0
i
y
0
i
= M ·
x
i
y
i
1
(6)
where
dst(i) = (x
0
i
,y
0
i
),src(i) = (x
i
,y
i
),i = 0,1,2 (7)
Finally the source image src is transformed using
the specified matrix M for each particular triangle to
calculate the pixels of the destination image dst:
dst(x,y) = src(M
11
x+M
12
y+M
13
,M
21
x+M
22
y+M
23
)
(8)
Texture Merging for Data Augmentation. Data
augmentation is widely applied to training and test
data to improve the performance of CNN-based meth-
ods and prevent over-fitting. The proposed approach
to augmentation is based on merging textures of a per-
son’s face derived from different images of that per-
son. In texture maps, all sides of a face are visible
and eyes, nose, mouth are all aligned to a common
reference frame, derived from the embedding. In the
process of generating our square texture maps, every
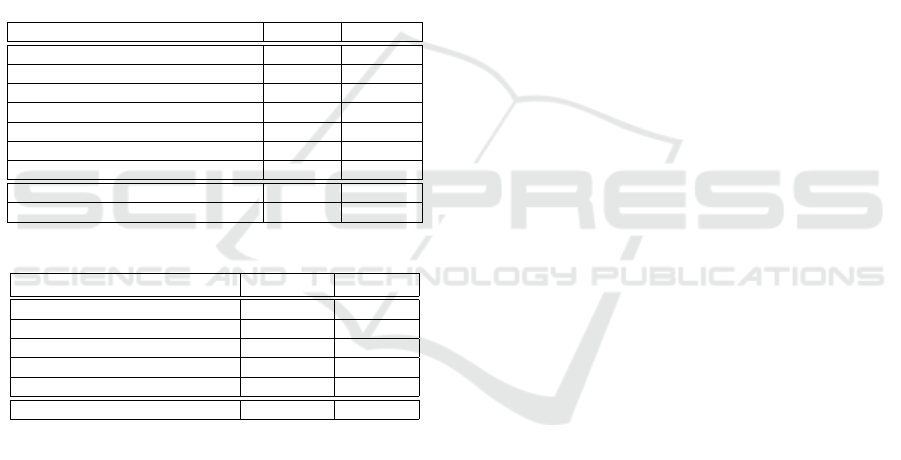
Figure 6: Data augmentation examples of one female and
one male subjects with five images per subject. A: Gen-
erated square texture maps from a single 2D image. B:
Merged four texture maps by alpha composite method. C:
Merged two texture maps by Poisson blending. D: Land-
mark aligned and edited square texture map.
pixel gets its assigned RGB values, and an alpha value
for visibility depending on the calculated angle to the
camera.
Our data augmentation aims to explore the effect
of merging different numbers of textures from a set
of images of the same person to a new one. Our first
method to merge the texture maps is to compose the
pixels based on their alpha values. The texture maps
are merged by taking the weighted mean with the val-
ues from the alpha channels used as weights.
In the second approach, we used Poisson blending
to merge textures. Poisson blending is a gradient do-
main image processing method that blends images by
combining them in the gradient domain and solving
for optimal RGB pixel values.
Our third training and evaluation dataset consists
of the facial landmark aligned texture maps from our
texture map reconstruction algorithm.
Figure 6 shows some example images from our
augmented CASIA WebFace dataset.
3 EXPERIMENTS
The effect of our texture enhancement method can
be judged subjectively from Figure 5. However, the
key motivation for the development of these texture
enhancement mechanisms is to improve the perfor-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
424
mance of 3D assisted 2D face recognition approaches.
Consequently, as objective measures of the proposed
square texture enhancements, we shall use the face
recognition and face verification rates achieved by
our 3D face recognition engine designed for use with
these texture maps. In particular, the aim of our ex-
periments is to evaluate the performance of a face
recognition engine trained using texture maps created
for the CASIA database. The training is limited to
the CASIA dataset so that in terms of the informa-
tion available for training, the results are comparable
to the 2D face recognition methods in the literature,
trained on the same resource. The evaluation is car-
ried out on standard benchmarks, i.e. the LFW and
IJB-A datasets, using the standard protocols.
Experimental Settings. The CASIA-WebFace (Yi
et al., 2014) dataset is used for scientific research of
unconstrained face recognition.
During each training, we conduct face verifica-
tion tests on the Labeled Faces in the Wild (LFW)
benchmark to evaluate the performance of the data
and configuration. The LFW dataset contains more
than 13,000 images of faces and has been the stan-
dard benchmark for unconstrained face verification
for many years. The IARPA Janus Benchmark-A face
challenge (IJB-A) was an open challenge in which re-
searchers execute algorithms on NIST-provided im-
age sets, and return output data to NIST for scoring.
From 2015-2017 NIST produced regular results re-
ports.
Face Recognition Engine. We use a TensorFlow
implementation of a face recogniser, described in the
paper from Schroff (Schroff et al., 2015), which is
based on Inception-Resnet-V1. We train the model
using softmax loss, which has been shown to be one
of the best-performing loss in recent works (Szegedy
et al., 2017). The input to the system are square tex-
ture maps with a resolution of 224 x 224 pixels as a
training and test set for the face recognition network.
We use a Tensorflow implementation of Inception-
ResNet-v1.
Effect of Texture Map Reconstruction. In the first
experiment, referred to as step (A), the aim was to es-
tablish a baseline and to gauge the effect of texture en-
hancement achieved by square texture reconstruction.
For this reason we trained the system and measured
its performance on individual square texture maps.
The underlying aim of the experiment was to estab-
lish that facial recognition based on square-texture-
maps is fundamentally possible and already achieves
an evaluation rate which is not lagging too far behind
2D methods in the literature. We also wanted to mea-
sure the effect of square texture map reconstruction.
For this reason we performed the experiment on the
original individual square texture maps first, and then
repeated it with the texture maps obtained using the
reconstruction method described in Section 2.2. The
verification on LFW was performed at a false accep-
tance rate (FAR) of 0.001 and the verification on IJB-
A was performed at a false acceptance rate of 0.01.
The results on the original texture maps achieved a
verification rate of 87.7% and an accuracy of 97.7%
on LFW and a verification rate of 73.3% on IJB-A as
shown in Table 1.
Table 1: Evaluation results of training the square texture
maps (A), the merged square texture maps (B+C), the land-
mark aligned reconstructed texture maps (D) and the com-
binations of them.
Method LFW Acc. IJB-A Ver.
A: square texture maps 97.7 73.3
B: 4-pic merged textures 96.8 68.7
C: 2-pic merged textures 97.0 69.5
D: landmark aligned textures 98.0 75.1
A+B 98.1 79.4
A+B+C 98.1 83.3
A+B+C+D 98.4 87.3
Effect of Texture Map Merging. In the second ex-
periment, referred to as step (B), four textures were
used to create a new texture by merging the faces
based on their alpha values as described in Section
2.3. To make sure that the total number of the train-
ing images does not change, they are merged as fol-
lows: If there are five images of a person, the first
four images are merged to a new image, the second
to fifth image are merged to a second new image, im-
age three, four, five and one then are merged to third
new image, etc. The result of the evaluation was sur-
prisingly worse than the results of A, but this can be
explained by the fact that the evaluation was done on
the non-merged textures, with missing values, which
the network hasn’t learned to interpret during training.
In order to adapt the evaluation data to the train-
ing data, we also merged the images of LFW and IJB-
A according to the method described above. Where
there were less than three images per class, additional
images were generated by horizontal mirroring. Us-
ing these measures, we were able to improve the re-
sult of the first experiment on IJB-A verification from
73.3% in A to 75.2%.
Effect of Texture Map Augmentation. In the next
step, by using the combination of A and B, we trained
for the first time with data augmentation. Doubling
the data has significantly improved all the test results.
Texture-based 3D Face Recognition using Deep Neural Networks for Unconstrained Human-machine Interaction
425
For example the IJB-A verification result increased
from 75.2% to 79.4%.
Then, in the next experiment (C), we merged two
images by Poisson Blending and added them to the
existing Set A and B. Thus, the data volume of the
training images has tripled and the results on the IJB-
A dataset have again improved from 79.4% to 82.1%.
Table 1 shows the evaluation results obtained by train-
ing using the different variants of texture maps.
That is followed by experiment (D), where the
original square texture maps are realigned by our fa-
cial landmark detector and Delaunay triangulation.
This has lead to a significant improvement of the
trained model, having an accuracy on LFW of 98.0
and 75.1 on IJB-A verification. Even the dataset
augmentation benefits a lot of adding dataset (D) to
achieve our best overall results.
Table 2: Face verification results on LFW.
Method #images ACC(%)
Hassner et al.(Hassner et al., 2015) 93.62
HPEN (Zhu et al., 2015) 0.75M 96.25
FF-GAN (Yin et al., 2017) 0.5M 96.42
CASIA-NET (Yi et al., 2014) 0.5M 96.42
DeepFace (Taigman et al., 2014) 4M 97.35
Masi et al. (Masi et al., 2016) 2.6M 98.06
VGG Face (Parkhi et al., 2015) 2.4M 98.95
Ours w/o augmentation 0.5M 97.7
Ours (A+B+C+D) 1.9M 98.4
Table 3: Evaluation on IJB-A dataset.
Method IJB-A Ver. IJB-A Id.
GOTS (Klare et al., 2015) 40.6 44.3
OpenBR (Klontz et al., 2013) 23.6 24.6
Wang et al. (Wang et al., 2015) 73.2 82.0
FF-GAN (Yin et al., 2017) 85.2 90.2
Masi et al. (Masi et al., 2016) 88.6 90.6
Ours 87.3 89.8
Finally, we compare our evaluation results to other
experiments that used the same dataset for training
and evaluation. Table 3 shows that we can com-
pete with previous work. Using our augmentation
strategies, we outperform most original methods, and
achieve a performance close to Masi et al., who addi-
tionally synthesised new poses, expressions and iden-
tities.
4 CONCLUSIONS
Although 3D assisted 2D face recognition has in
theory the potential to surpass the performance of
2D face recognition by virtue of separating the key
sources of face biometric information, namely face
shape and skin texture, it has always lagged behind
purely 2D techniques. There are several reasons for
this state of affairs. First of all, recovering 3D in-
formation from 2D projections is prone to errors.
Moreover, the conventional mesh representation of
3D faces is not convenient for convolutional process-
ing by the latest machine learning tools, i.e. deep neu-
ral networks.
We proposed two enhancement techniques: geo-
metric texture map rectification to correct for shape
reconstruction errors, and quality controlled texture
merging from multiple images. We showed that with
these innovations the performance of our 3D face
recognition engine, designed for, and working with,
3D face representations of 2D faces (texture only),
can produce competitive results on standard bench-
marking datasets. As there is a considerable scope
for improving many aspects of the 3D assisted 2D
face recognition approach, we consider these results
as very promising. Future improvements will include
training on much larger databases, following the path
of purely 2D face recognition methods, as well as us-
ing the 3D shape information in conjunction with the
skin texture maps.
ACKNOWLEDGEMENTS
This work was supported in part by the EPSRC Pro-
gramme Grant (FACER2VM) EP/N007743/1, the EP-
SRC/dstl/MURI project EP/R018456/1, the National
Natural Science Foundation of China (61902153) and
the BMBF FHprofUnt program, no. 03FH049PX5.
REFERENCES
Bulat, A. and Tzimiropoulos, G. (2017). How far are we
from solving the 2d & 3d face alignment problem?
(and a dataset of 230, 000 3d facial landmarks). In
ICCV, pages 1021–1030. IEEE Computer Society.
Chatfield, K., Simonyan, K., Vedaldi, A., and Zisserman,
A. (2014). Return of the devil in the details: Delv-
ing deep into convolutional nets. In Valstar, M. F.,
French, A. P., and Pridmore, T. P., editors, British Ma-
chine Vision Conference, BMVC 2014, Nottingham,
UK, September 1-5, 2014. BMVA Press.
Cootes, T. F., Edwards, G. J., and Taylor, C. J. (2001). Ac-
tive appearance models. IEEE Transactions on Pat-
tern Analysis & Machine Intelligence, 23(6):681–685.
Ding, C. and Tao, D. (2016). A comprehensive survey on
pose-invariant face recognition. ACM Transactions on
intelligent systems and technology (TIST), 7(3):37.
Doll
´
ar, P., Welinder, P., and Perona, P. (2010). Cascaded
pose regression. In Computer Vision and Pattern
Recognition CVPR, 2010 IEEE Conference on, pages
1078–1085. IEEE.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
426

Feng, Z., Kittler, J., Awais, M., Huber, P., and Wu, X.
(2018). Wing loss for robust facial landmark local-
isation with convolutional neural networks. In 2018
IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2017, Salt Lake City, UT, USA,
July 18-22, 2018. IEEE Computer Society.
Feng, Z.-H., Huber, P., Kittler, J., Christmas, W., and Wu,
X.-J. (2015). Random cascaded-regression copse for
robust facial landmark detection. IEEE Signal Pro-
cessing Letters, 22(1):76–80.
Gonz
´
alez, R. C. and Woods, R. E. (2008). Digital image
processing, 3rd Edition. Pearson Education.
Hassner, T., Harel, S., Paz, E., and Enbar, R. (2015). Ef-
fective face frontalization in unconstrained images.
In IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2015, Boston, MA, USA, June 7-
12, 2015, pages 4295–4304. IEEE Computer Society.
Huang, G. B., Ramesh, M., Berg, T., and Learned-Miller,
E. (2007). Labeled faces in the wild: A database for
studying face recognition in unconstrained environ-
ments. Technical Report 07-49, University of Mas-
sachusetts, Amherst.
Huber, P., Hu, G., Tena, J. R., Mortazavian, P., Koppen,
W. P., Christmas, W. J., R
¨
atsch, M., and Kittler, J.
(2016). A multiresolution 3d morphable face model
and fitting framework. In Proceedings of the 11th
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications (VISI-
GRAPP 2016) - Volume 4: VISAPP, Rome, Italy,
February 27-29, 2016., pages 79–86. SciTePress.
Jourabloo, A. and Liu, X. (2017). Pose-invariant face align-
ment via cnn-based dense 3d model fitting. Interna-
tional Journal of Computer Vision, 124(2):187–203.
Kittler, J., Koppen, P., Kopp, P., Huber, P., and R
¨
atsch, M.
(2018). Conformal mapping of a 3d face representa-
tion onto a 2d image for CNN based face recognition.
In 2018 International Conference on Biometrics, ICB
2018, pages 124–131. IEEE.
Klare, B. F., Klein, B., Taborsky, E., Blanton, A., Cheney,
J., Allen, K., Grother, P., Mah, A., Burge, M. J., and
Jain, A. K. (2015). Pushing the frontiers of uncon-
strained face detection and recognition: IARPA janus
benchmark A. In CVPR, pages 1931–1939. IEEE
Computer Society.
Klontz, J. C., Klare, B., Klum, S., Jain, A. K., and Burge,
M. J. (2013). Open source biometric recognition. In
IEEE Sixth International Conference on Biometrics:
Theory, Applications and Systems, BTAS 2013, Ar-
lington, VA, USA, September 29 - October 2, 2013,
pages 1–8. IEEE.
Koppen, P., Feng, Z.-H., Kittler, J., Awais, M., Christmas,
W., Wu, X.-J., and Yin, H.-F. (2018). Gaussian mix-
ture 3d morphable face model. Pattern Recognition,
74:617–628.
Masi, I., Tran, A. T., Hassner, T., Leksut, J. T., and Medioni,
G. G. (2016). Do we really need to collect millions of
faces for effective face recognition? In 14th European
Conference Computer Vision, ECCV 2016, Proceed-
ings, Part V, volume 9909 of Lecture Notes in Com-
puter Science, pages 579–596. Springer.
Parkhi, O. M., Vedaldi, A., and Zisserman, A. (2015). Deep
face recognition. In Xie, X., Jones, M. W., and Tam,
G. K. L., editors, Proceedings of the British Machine
Vision Conference 2015, BMVC 2015, pages 41.1–
41.12. BMVA Press.
Schroff, F., Kalenichenko, D., and Philbin, J. (2015).
Facenet: A unified embedding for face recognition
and clustering. In IEEE Conference on Computer
Vision and Pattern Recognition, CVPR 2015, pages
815–823. IEEE Computer Society.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. A.
(2017). Inception-v4, inception-resnet and the im-
pact of residual connections on learning. In Singh,
S. P. and Markovitch, S., editors, Proceedings of
the Thirty-First AAAI Conference on Artificial Intel-
ligence, pages 4278–4284. AAAI Press.
Taigman, Y., Yang, M., Ranzato, M., and Wolf, L. (2014).
Deepface: Closing the gap to human-level perfor-
mance in face verification. In 2014 IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2014, pages 1701–1708. IEEE Computer Society.
Wang, D., Otto, C., and Jain, A. K. (2015). Face search at
scale: 80 million gallery. CoRR, abs/1507.07242.
Wang, N., Gao, X., Tao, D., and Li, X. (2014). Facial fea-
ture point detection: A comprehensive survey. CoRR,
abs/1410.1037.
Yi, D., Lei, Z., Liao, S., and Li, S. Z. (2014). Learning face
representation from scratch. CoRR, abs/1411.7923.
Yin, X., Yu, X., Sohn, K., Liu, X., and Chandraker, M.
(2017). Towards large-pose face frontalization in the
wild. In ICCV, pages 4010–4019. IEEE Computer So-
ciety.
Zhang, J., Shan, S., Kan, M., and Chen, X. (2014). Coarse-
to-fine auto-encoder networks (CFAN) for real-time
face alignment. In Fleet, D. J., Pajdla, T., Schiele, B.,
and Tuytelaars, T., editors, Computer Vision - ECCV
2014 - 13th European Conference, Proceedings, Part
II, volume 8690 of Lecture Notes in Computer Sci-
ence, pages 1–16. Springer.
Zhu, X., Lei, Z., Liu, X., Shi, H., and Li, S. Z. (2016).
Face alignment across large poses: A 3d solution. In
2016 IEEE Conference on Computer Vision and Pat-
tern Recognition, CVPR, 2016, pages 146–155. IEEE
Computer Society.
Zhu, X., Lei, Z., Yan, J., Yi, D., and Li, S. Z. (2015). High-
fidelity pose and expression normalization for face
recognition in the wild. In IEEE Conference on Com-
puter Vision and Pattern Recognition, CVPR, 2015,
pages 787–796. IEEE Computer Society.
Texture-based 3D Face Recognition using Deep Neural Networks for Unconstrained Human-machine Interaction
427
