
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic
Large-scale Industry Environments
Tobias Feigl
1,2
, Andreas Porada
1
, Steve Steiner
1
, Christoffer L
¨
offler
1,3
, Christopher Mutschler
1,3
and Michael Philippsen
2
1
Machine Learning and Information Fusion Group, Fraunhofer Institute for Integrated Circuits IIS, N
¨
urnberg, Germany
2
Programming Systems Group, Friedrich-Alexander University (FAU), Erlangen-N
¨
urnberg, Germany
3
Machine Learning and Data Analytics Lab, Friedrich-Alexander University (FAU), Erlangen-N
¨
urnberg, Germany
Keywords:
Augmented Reality (AR), Simultaneous Localization and Mapping (SLAM), Industry 4.0, Apple ARKit,
Google ARCore, Microsoft Hololens.
Abstract:
Augmented Reality (AR) systems are envisioned to soon be used as smart tools across many Industry 4.0
scenarios. The main promise is that such systems will make workers more productive when they can obtain
additional situationally coordinated information both seemlessly and hands-free. This paper studies the ap-
plicability of today’s popular AR systems (Apple ARKit, Google ARCore, and Microsoft Hololens) in such
an industrial context (large area of 1,600m
2
, long walking distances of 60m between cubicles, and dynamic
environments with volatile natural features). With an elaborate measurement campaign that employs a sub-
millimeter accurate optical localization system, we show that for such a context, i.e., when a reliable and
accurate tracking of a user matters, the Simultaneous Localization and Mapping (SLAM) techniques of these
AR systems are a showstopper. Out of the box, these AR systems are far from useful even for normal motion
behavior. They accumulate an average error of about 17m per 120m, with a scaling error of up to 14.4cm/m
that is quasi-directly proportional to the path length. By adding natural features, the tracking reliability can be
improved, but not enough.
1 INTRODUCTION
The availability of Apple’s ARKit, Google’s ARCore,
and Microsoft’s Hololens, called AR
A
(Dilek and Erol,
2018), AR
G
(Voinea et al., 2018), and AR
M
(Vassallo
et al., 2017) below, with their built-in inside-out track-
ing technology that allows an accurate estimation of
a user’s pose, i.e., his/her head orientation and posi-
tion, in small areas (5m × 5m) has kindled the inter-
est of industry in low-cost, self-localization-based AR
technology (Klein and Murray, 2007; Linowes and
Babilinski, 2017), to fully embed virtual content into
the real environment (Feigl et al., 2018; Regenbrecht
et al., 2017).
To avoid collisions between users and the environ-
ment that may be caused by misperceptions of the en-
vironment (Dilek and Erol, 2018), accurate and reli-
able pose estimates are needed. Thus, Visual-Inertial
Simultaneous Localization and Mapping (VISLAM)
has been invented (Liu et al., 2018; Taketomi et al.,
2017; Terashima and Hasegawa, 2017; Kasyanov
et al., 2017). It combines the camera’s RGB (Li et al.,
2017) or RGB-D (Mur-Artal and Tardos, 2017; Kerl
et al., 2013) signals with inertial sensor data from the
headset (Kasyanov et al., 2017) to extract unique syn-
thetic (Kato and Billinghurst, 1999; Marques et al.,
2018) or natural (Neumann and You, 1999; Simon
et al., 2000) features from the environment. With
computationally intensive algorithms this works well
on indoor and outdoor scenarios, at least on labo-
rious datasets like KITTI (Geiger et al., 2013) and
TUM (Schubert et al., 2018).
Unfortunately, current mobile AR systems have
limited computational resources and thus only use
a stripped down version of the latest, advanced VI-
SLAM techniques (Liu et al., 2018; Taketomi et al.,
2017; Terashima and Hasegawa, 2017). AR
A
and
AR
G
(Linowes and Babilinski, 2017) seem to use VI-
SLAM to register 3D poses and AR
M
seems to use a
combination of VISLAM and RGB-D (Mur-Artal and
Tardos, 2017; Kerl et al., 2013; Vassallo et al., 2017).
The purpose of this study is to find out whether
the stripped down SLAM technology built into these
AR systems suffices for daily use in industry settings.
Feigl, T., Porada, A., Steiner, S., Löffler, C., Mutschler, C. and Philippsen, M.
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic Large-scale Industry Environments.
DOI: 10.5220/0008989903070318
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
307-318
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
307

In an elaborate campaign we thus measure the accu-
racy and precision of the initialization, localization,
and relocalization with a sub-millimeter accurate op-
tical reference localization system. We study both the
scaling errors and the reliability, i.e., the robustness
with respect to fail-safety of the localization. And we
investigate how the number of features influences the
localization performance. We do all of this for three
scenarios: self-motion in a static-environment, self-
motion in a dynamic-environment, and mixed variants
(both self- and object-motion).
Our evaluation shows that these AR systems do
not yet work well enough for large-scale (industrial)
environments. The main reasons are that the typical
camera-based problems (such as poor lighting condi-
tions, inadequate geometry, low structural complexity
of the environment, and dynamics in the images, i.e.,
motion blur) cause a drift in the scaling of the envi-
ronment map and a divergence of the real and virtual
SLAM maps (Klein and Murray, 2007). The mis-
match is even worse if self- and object-motion can-
not be separated correctly (Li et al., 2018). The lack
of reference points in the environment that otherwise
may be used to reset scaling errors further limits their
applicability in large-scale industry settings (Fraga-
Lamas et al., 2018; Liu et al., 2018).
The paper is structured as follows. We discuss re-
lated work in Sec. 2. Sec. 3 describes the problem.
We introduce our evaluation scheme in Sec. 4. Sec. 5
discusses evaluation results before Sec. 7 concludes.
2 RELATED WORK
In the following we discuss relevant publications that
range from the challenges of current SLAM meth-
ods in AR (Dilek and Erol, 2018; Linowes and Ba-
bilinski, 2017; Vassallo et al., 2017; Li et al., 2017),
over general technical challenges of commercial AR
systems, to the applicability and usability of mod-
ern AR systems in industry settings (Fraga-Lamas
et al., 2018; Palmarini et al., 2017; Klein and Murray,
2007). Here, some researchers also address specific
industry applications and discuss the needs and dif-
ficulties of AR systems (Marchand et al., 2016; Yan
and Hu, 2017). Finally, we discuss publicly available
datasets that are commonly used to evaluate SLAM
methods.
SLAM in AR Systems. Motion tracking has long
been a research focus in the areas of computer vision
and robotics. 3D point registration methods such as
SLAM are the key for achieving immersive AR ef-
fects and for accurately registering and locating a per-
son’s pose in real time in an unknown environment.
Early AR solutions such as ARToolkit (Linowes and
Babilinski, 2017) and Vuforia (Marchand et al., 2016)
use synthetic registration markers which restrict AR
objects to specific locations. Today, most camera
tracking methods are based on natural features. Vi-
sual SLAM (VSLAM) has made remarkable progress
over the last decade (Taketomi et al., 2017; Marc-
hand et al., 2016; Kasyanov et al., 2017; Li et al.,
2018; Mur-Artal and Tardos, 2017; Terashima and
Hasegawa, 2017), enabling a real-time indoor and
outdoor use, but still suffers heavily from scaling er-
rors of the real and estimated maps.
When there is enough computational performance
available, Visual Inertial SLAM (VISLAM) can com-
bine VSLAM with Inertial Measurement Unit (IMU)
sensors (accelerometer, gyroscope, and magnetome-
ter) to partly resolve the scale ambiguity, to provide
motion cues without visual features (Liu et al., 2018;
Kasyanov et al., 2017), to process more features, and
to make the tracking more robust (Taketomi et al.,
2017; Kerl et al., 2013). We claim that AR
A
, AR
G
,
and AR
M
have limited computational capacity, need
to save battery, and hence cannot process enough fea-
tures to achieve a high tracking accuracy.
Technical Challenges of Commercial AR Sys-
tems. While vendors keep the exact implementa-
tion of SLAM in their systems secret and hence
prevent application-based fine-tuning, there are sev-
eral other technical constraints that limit the track-
ing performance of these products: The algorithms in
AR
A
(Dilek and Erol, 2018) are not only completely
closed source, but also limited to Apple hardware
and iOS. AR
G
(Linowes and Babilinski, 2017) suffers
from performance bottlenecks due to hardware limita-
tions on Android devices. AR
M
(Vassallo et al., 2017)
only exposes its SLAM through a narrow API. In ad-
dition, a central processing unit that runs the SLAM
algorithms (Holographic Processing Unit, HPU) lim-
its its computational performance. The three AR sys-
tems have in common that they limit the tracking ac-
curacy to provide a higher frame rate, a slower battery
drain, and a lower hardware temperature as otherwise
there may be a complete system failure (Linowes and
Babilinski, 2017).
Applicability in Industry. Advantages and disadvan-
tages of AR for industrial maintenance are already
studied (Palmarini et al., 2017). They state that un-
damaged, clean, and undisguised markers (Kato and
Billinghurst, 1999), e.g., QR and Vuforia codes, are
needed to alleviate the problems.
To the best of our knowledge, there are no publicly
available localization studies of AR systems in large-
scale industry settings about (above 250m
2
). Dilek
et al. (2018) describe both the functional limits of
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
308

AR
A
and its limitations in real-time localization (dark
scenes, few features, and excessive motion causing
blurry images). They find that the localization system
only works well in small areas of up to 1m
2
. Their
findings indicate that current commercial AR systems
are not yet applicable in industry settings.
Poth (2017) evaluates the AR systems for machine
maintenance in the context of the Internet of Things
(IoT). They rate systems according to their function-
ality and quality. Similar to Dilek et al. (Dilek and
Erol, 2018) they find that AR systems only work well
in small rooms and close to unique features in the en-
vironment. By attaching synthetic markers to the dy-
namic objects in the real environment they stabilize
the AR systems and achieve a more accurate and reli-
able tracking over an area of 25m
2
. Our evaluation is
partially motivated by their evaluation criteria.
AR Datasets. Dilek et al. (2018) and LI (Li et al.,
2018; Handa et al., 2014) (human motion; in-/outdoor
scenarios) provide complex camera movement specif-
ically designed for AR systems. Unfortunately, both
have restrictions: They do not provide an industry
scenario and only provide inertial sensor informa-
tion and camera images, but there are no Hololens-
specific RGB-D images. Other available datasets
like KITTI (Geiger et al., 2013) (car motion; out-
door scenario) and EuRoC (Burri et al., 2016; L
¨
offler
et al., 2018) (MAV motion; indoor scenario), and
TUM (Schubert et al., 2018) and ADVIO (Cort
´
es
et al., 2018) (human motion; in-/outdoor scenarios)
do not contain typical AR effects such as free and dy-
namic user movements that include abrupt changes in
either direction or speed, loss of camera signals, etc.
Moreover, these datasets cannot be used to re-evaluate
AR
A
, AR
G
, and AR
M
because these systems do not
provide access to their processing pipeline: One can-
not feed pre-recorded input data directly to the algo-
rithms as these only work with the sensors (Linowes
and Babilinski, 2017). Thus, there is no dataset avail-
able to investigate the reliability and accuracy of cur-
rent AR systems in large-scale industry scenarios.
In total, since all the preliminary work does not
help to decide if current commercial AR systems are
applicable in industry settings, our paper creates a
new industry-related dataset and evaluates the appli-
cability of these AR systems.
3 PROBLEM DESCRIPTION
To set the terminology for the rest of the paper, let us
sketch the key ideas of SLAM and its main localiza-
tion problems in more detail. This allows us to set up
error metrics in Sec. 4.
To seamlessly merge virtual objects or informa-
tion into the real physical environment and to present
the result in the user’s HMD, AR systems require fast
and accurate initialization, re-location after a tempo-
rary tracking loss, and accurate scaling of the vir-
tual map for accurate and reliable localization. What
makes this difficult is that AR users move completely
free and dynamic which causes a variety of unex-
pected situations, such as abrupt changes in either di-
rection or speed, that lead to occasional camera shake,
loss of camera signal, rapid camera movement with
strong motion blur, and dynamic interference.
SLAM methods address these problems. While
SLAM methods differ in their feature-processing,
mapping, and optimization, in general they all ex-
ploit loop closures, i.e., they use unique features in
the environment with known positions to recalibrate
the system and to correct mismatches of the mapping.
Obviously, lack of these features or their occlusion
limits the effectiveness of this approach. The accu-
racy and reliability of SLAM depends on the correct
feature detection and the correct detection of move-
ment. First, there are both sensor noise and sensor
measurement errors that lead to accumulating esti-
mation errors of the movement when there are rapid
changes in motion (Marchand et al., 2016; Taketomi
et al., 2017). This even affects the best performing
VISLAM approaches that combine inertial sensors
and monocular camera images to more accurately es-
timate the user’s movement. Second, there is the un-
certainty of whether the AR system or the environ-
ment is moving or both. This also limits SLAM as it
leads to inaccurate and unreliable pose estimates. Fi-
nally, small mistakes accumulate over time, decrease
the localization accuracy, and cause unreliability.
Let us discuss the limits and the types of resulting
errors in some more detail.
Dependency on Features. The tracking performance
of SLAM depends on the environment. The more
unique synthetic or natural features an environment
offers, the higher are the accuracy and reliability
when detecting and tracking features, but the com-
putational effort and battery consumption also in-
crease (Li et al., 2018). Most SLAM methods (Fraga-
Lamas et al., 2018) use synthetic features (Marques
et al., 2018), such as unique QR (Voinea et al., 2018)
or Vuforia (Linowes and Babilinski, 2017) codes. But
as synthetic features are elaborate to set up, today’s
systems try to locate natural features (Fraga-Lamas
et al., 2018; Neumann and You, 1999; Simon et al.,
2000). Regardless of the type of features used, if there
are too few unique features the localization accumu-
lates drift (scaling errors) or fails completely (Voinea
et al., 2018). After a failure, the system relocates its
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic Large-scale Industry Environments
309

last position and aligns its map. This has two types of
consequences: First, it is time consuming and leads to
blind spots that cause map distortions in dynamic en-
vironments (Durrant-Whyte and Bailey, 2006). And
second, an error in the relocation phase introduces a
mismatch of the mapping (Linowes and Babilinski,
2017) which adds to the already accumulated drift.
Self- vs. Object-motion. A key assumption of
SLAM is that features of the environment have known
and static positions, so when the user moves (dynamic
self-motion), objects shift their relative positions in
the camera frame. As different positions in the en-
vironment in general result in different shifts in the
frame, SLAM can use this to estimate the user’s tra-
jectory. Even though occlusion of objects is an ob-
vious issue here, SLAM works reasonably accurate
and reliable in this case. This is no longer true, when
objects move as well (dynamic object motion) (Sa-
putra et al., 2018). Since then the map of the ob-
jects is no longer valid, SLAM’s estimate of the user
position in general is wrong and unreliable, unless
self- and object-motion can be separated (Taketomi
et al., 2017). There is a middle ground: both the user
or the objects can also be semi-static when resting
phases with a fixed position alternate with short mo-
tion phases. Here, again both temporarily occluded
features and the unreasonable origin of feature mo-
tion accumulate pose errors.
There are two widely used error descriptions in
the literature: the scaling (localization) error and the
mapping (initialization and relocalization) error.
Scaling Errors. The more features are occluded,
the less reliable SLAM’s mapping between regis-
tered and measured features gets. The solution of
the Perspective-n-Point (PnP) problem suffers from
vanishing known features and becomes imprecise. A
known countermeasure is to use environments with
more distinct features, hoping that fewer of them get
occluded when the camera moves. Another counter-
measure are reset points. But using them in general
accumulates a drift, i.e., a divergence of the mapping
between real and virtual positions. This mismatch is
called a scaling error.
Mapping Error. An unknown initial calibration (ini-
tialization error) of the registered and the measured
maps leads to critical mapping problems, such as a
wrong starting position in the map. Even with an
accurate and reliable relative tracking the result is a
complete misrepresentation of the real and estimated
motion trajectories (Choset et al., 2005). Even if the
initial calibration is correct, calibration inaccuracies
in SLAM’s relocalization cause mapping errors.
Optical
Reference
System
G
AR
M
AR
A
AR
AR
Measurement
System
Evaluator
WiFi
WiFi
<time, state, #features,
rel. position,
rel. orientation>
<time, state,
abs. position,
abs. orientation>
Synchronize
(ref., meas.)
HMD
Input
Controller
Unity3D
Figure 1: Evaluation framework.
4 DESIGN OF THE STUDY
This section describes our measurement setup, the
study designs, and the metrics used to assess the
tracking-, initialization-, and relocalization-accuracy,
and the reliability of the AR systems.
4.1 Measurement Setup
We first sketch our evaluation framework and its
hardware- and software-components. Then we de-
scribe both the small-scale measurement setup (to
gauge the impact of feature motion on the accuracy
and reliability of the AR platforms) and the large-scale
measurement setup (to evaluate the performance of
the AR platforms in real-world industry settings).
General Measurement Setup. The central evalua-
tor of our evaluation framework in Fig. 1 has inputs
from two sides: On the right there are the three hard-
ware platforms AR
A
, AR
G
, and AR
M
, see Fig. 2(a-c),
to which we attached rigid markers (gray balls) that an
optical reference system (on the left of Fig. 1) uses to
measure the baselines of the user’s position and orien-
tation. For the small- and the large-scale experiment
there are different reference systems.
The former uses an Advanced Real-time Track-
ing (ART) system (12 ARTTRACK5 cameras with
4MP at 300Hz) with a mean absolute position er-
ror of MAE
ART
(pos.)=0.1mm (min: 0.001mm; max:
3.2mm; SD: 0.54mm) and an average absolute orien-
tation accuracy of MAE
ART
(ori.)=0.01
◦
(min: 0.001
◦
;
max: 0.2
◦
; SD: 0.06
◦
) to estimate 6DoF poses on
an area of 10m×10m×3m=300m
3
. The latter uses a
Qualysis system (36 cameras (type designation: 7+)
with 12MP at 300Hz) with a mean absolute posi-
(a) AR
A
. (b) AR
G
. (c) AR
M
. (d) Input.
Figure 2: AR hardware components of our measurement
platforms: (a) AR
A
HMD: Starlight 2017; Rendering de-
vice: Apple iPhone X Late 2018 512GB, iOS 12.3; (b)
AR
G
HMD: Samsung GearVR 2018b; Rendering device:
Samsung Galaxy S9 256GB, Android 9.1; (c) AR
M
HMD:
Hololens v1, v2017a; (d) Input controller: BLE 2018.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
310
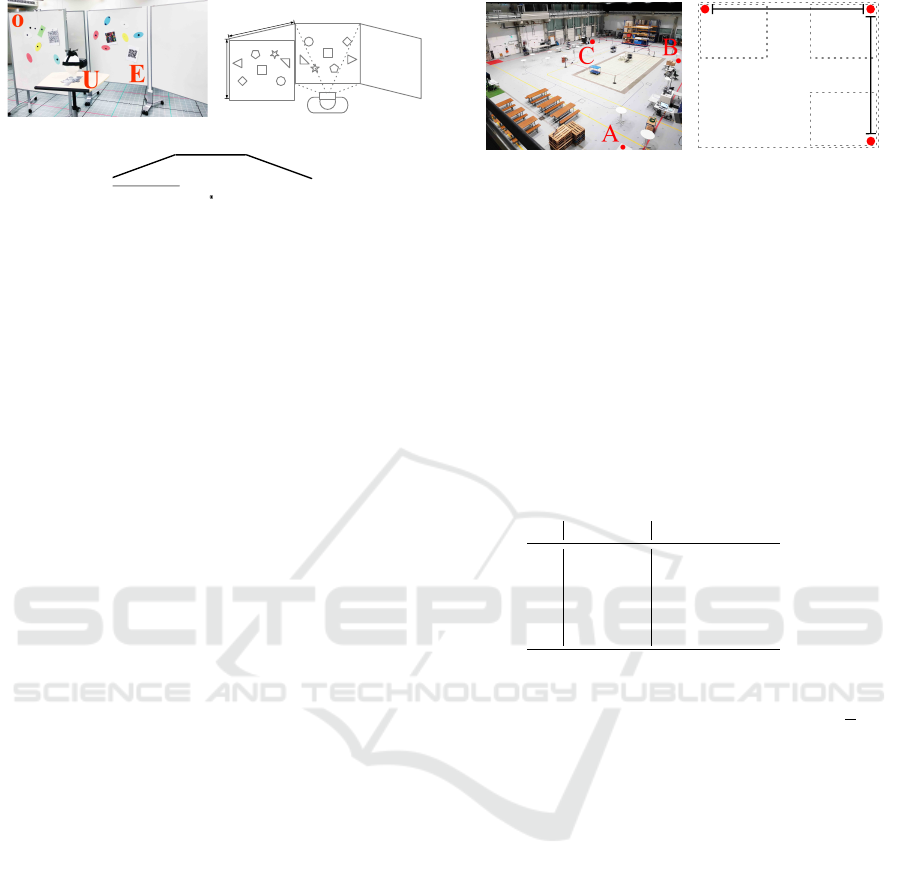
(a) Real situation.
E
1
E
3
U
x
y
E
2
O
(b) Schematic fronal view.
E
U
O
(c) Schematic top-view.
Figure 3: Small-scale setup: (U)ser, (E)nvironment, and
(O)ccluder.
tion error of MAE
Qualysis
(pos.)=1.2mm (min: 0.1mm;
max: 8.9mm; SD: 2.17mm) and a mean absolute
orientation error of MAE
Qualysis
(ori.)=0.52
◦
(min:
0.01
◦
; max: 1.7
◦
; SD: 0.76
◦
) to estimate 6DoF poses
on 45m×35m×7m=11.025m
3
.
The evaluator receives different data from the two
sides. The reference system sends the current UTC
timestamp and the absolute position and orientation at
300Hz on average (SD=0.01Hz). In addition, the ARs
send their state (reliability level from 0%=not work-
ing to 100%=working) and the number of features
(number of vertices of the current room mesh, i.e.,
the number of unique synthetic or natural features)
that yield the relative position and orientation (AR
A
:
avg. 31Hz, SD=3.6Hz; AR
G
: avg. 27Hz, SD=7.9Hz;
AR
M
: avg. 60Hz, SD=11.2Hz). Note, that the coordi-
nate systems of the ARs are always relative to the ref-
erence system’s coordinate system. To align both, we
simply match the origins of the two coordinate sys-
tems and align the directions of the x- and y-axes.
The evaluator employs the cross-platform AR en-
gine Unity3D (version 2018 LTS). To synchronize the
data packets received from the two sides it uses both
the UTC timestamp of the common WiFi access point
and the frames per second rate (FPS). We also use
Unity3D to implement the visualization of the user
interface and to control the experiment, i.e., to start
and stop the recording of the data which we trigger
with a typical input device, see Fig. 2(d). For each
experiment, the evaluator also provides visual feed-
back on the successful calibration and alignment of
the reference and measurement setup.
The small-scale setup (Fig. 3) is a feature-rich en-
vironment consisting of 3 areas E
1
–E
3
(static boards
of size 2m×2m) that are positioned with an angle of
160
◦
between them. While E
1
and E
3
are feature-
free, the center board E
2
has a set of unique syn-
thetic features whose poses the reference system can
determine. There is also a moveable occluder board
O that we roll into the user’s field of view (FoV) in
certain scenarios of the experiment. Board O has the
(a) Real situation.
30m
30m
C B
A
(b) Schematic top-view.
Figure 4: Large-scale setup: Cubicles A–C.
same size but a different set of synthetic features. Ac-
cording to Dilek et al. (2018) we chose boards with
white backgrounds to avoid uncontrolled additional
features. The distance between U, O, and E is chosen
so that E and O completely fill the user’s FoV.
Large-scale Setup. Fig. 4 shows the large-scale
setup that. On a floor of 30m×30m there are three
cubicles A–C and several natural features.
4.2 Study Design
Table 1: Small-scale scenes.
(U)ser (O)ccluder
S
1
static absent
S
2
dynamic absent
S
3
static dynamic
S
4
dynamic dynamic
S
5
dynamic* dynamic*
* synchronous movement of U and O,
with the same start- and end-points.
Small-scale Study. We studied five different Small-
scale motion scenarios S
1
–S
5
. In all of them the static
environment E
1
–E
3
remained the same. As Table 1
shows, in S
1
and S
2
there was no occluder. In the
other three scenarios O moved while the user either
remained static or moved as well. In S
5
the movement
of U and O was synchronous and the individual start-
and end-points of both were the same. Fig. 5 shows
snapshots of the scene over time. The red dashed ar-
rows indicate the movement paths that will happen
before the next snapshot is taken.
We claim that these scenarios mimic what fre-
quently happens in industry settings when workers are
busy in a cubicle and they or their surrounding objects
may move within the cubicle.
Before we started recording the poses in each of
the five scenarios, we calibrated the AR platforms.
To do so, we aligned the relative coordinate system
of the AR systems with the absolute coordinate sys-
tem of the reference system on the basis of the first
measured data points. This eliminates any differences
in position and orientation. Based on this initial ad-
justment, both systems then track the same current
pose within the experiment. After the calibration we
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic Large-scale Industry Environments
311

E
U
E
U
E
U
time
t=2
t=1t=0
E
U
t=3 t=4
(a) S
1
: static U,no O.
E
U
E
U
E
U
E
U
(b) S
2
: dynamic U,
no O.
E
U
O
E
U
O
E
U
O
E
U
O
(c) S
3
: static U,
dynamic O.
E
O
U
E
U
O
E
U
O
E
U
O
(d) S
4
: dynamic U
and dynamic O.
E
O
U
E
O
U
E
O
U
E
U
O
E
U
O
(e) S
5
: synchronous
dynamic* U and O.
Figure 5: Small-scale experiment: Exemplary snapshots for the scenarios S
1
to S
5
; (U)ser, (E)nvironment, and (O)ccluder;
red arrows indicate motion over time from the bottom- to the top-row; blue arrows indicate the user’s viewing direction; gray
dotted lines indicate a wall; duration between the three snapshots varies between the S
i
; *synchronous dynamic motion: both
U and O have the same speeds and directions with the same individual start- and end-points.
slightly moved the AR platform to identify features of
the central board E
2
and thus to initialize the tracking.
For each scenario, we recorded measurement data
ten times and only present the mean values below.
S
1
(static U, no O) covers the real-world situation
of a static user, standing still in a static environment.
There is no occluder. In this and all of the subsequent
small-scale scenarios the view of the user is always
focused on E during the measurement.
In scenario S
2
(dynamic U, no O) the user per-
forms a lateral movement from the right to the left
side and back, at 0.5m/s on average, SD=0.25m/s.
S
3
(static U , dynamic O) is a real-world situa-
tion of a static user standing still in a dynamic en-
vironment. The occluder O moves into the user’s
FoV from the right. Once it reaches the center it
fully occludes the features of E
2
, presenting its own
features to the user instead. O then changes its di-
rection and moves back to the right. We used two
different O-velocities: fast=0.8m/s, SD=0.2m/s and
slow=0.3m/s, SD=0.1m/s.
In S
4
(dynamic U and O) both the user and the
occluder move, but independently of each other. The
user performs a lateral movement from the center to
the left, changes his/her direction, and moves to the
right, changes his/her direction, and moves back to
the center, at 0.5m/s on average, SD=0.25m/s. At the
same time O moves from the right to the left, changes
its direction, and moves back. On its way the oc-
cluder O temporarily hides the features of E
2
twice
(and presents its own features instead). We used the
same two O-velocities as in S
3
.
In S
5
(synchronous dynamic U and O) again
both the user and the occluder move, but their
speeds and directions are synchronized (velocity
SD(U,O)=0.9m/s) so that the occluder O always
hides the features of E
2
and presents its own fea-
tures instead. Both the user and the occluder start
from the right, move to the center, change their
directions, and move to the right, change their direc-
tions, and move to the left, and turn back to the right.
S
5
uses the same O-velocities, but this time also for U.
Large-scale Study. We studied two different Large-
scale scenarios L
1
and L
2
. Fig. 6 shows the movement
paths of the user U. We claim that both scenarios are
typical for an industry context with natural features:
workers are likely to move between cubicles that are
distant to each other. Again, we initially calibrated the
AR platforms before we started to record the pose for
each of the two scenarios. We again recorded mea-
surement data ten times and only present the mean
values below.
In L
1
a user moves within a static environment
with natural features and follows a rectangular path of
2×20m+2×30m=100m. The user starts in S and stops
in E where we relocalize, i.e., recalibrate the system
to determine the scaling and mapping errors.
In L
2
a user also moves within a static environ-
ment with natural features. The user starts in cubicle
A, walks to B, and stops in C. Then, we relocalize and
determine the scaling and mapping errors before the
user walks back to A via B. The trajectory length is
4×30m=120m. When back in A, we again relocalize
(a) L
1
: From (S)tart to
(E)nd.
(b) L
2
: From cubicles A
via B to C, and back.
Figure 6: Large-scale experiment: L
1
and L
2
show user tra-
jectories (red dashed arrows); same cubicles as in Fig. 4.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
312

and determine the errors.
To gauge how errors accumulate after the first 60m
in cubicle C, there is a second set of measurements
without the relocalization.
4.3 Metrics
Tracking Accuracy. We evaluate the accuracy by
means of the mean absolute error (MAE) and the
mean relative error (MRE). We measure both errors
in terms of position error [m] and orientation error [
◦
]:
MAE =
∑
n
i=1
|r
i
− m
i
|
n
, (1)
where r
i
is the value from the reference system and
m
i
is the value measured in the AR system. The MAE
uses the same scale as the data being measured. The
mean relative error (MRE) is the following average:
MRE =
∑
n
i=1
||r
i+1
− r
i
| −|m
i+1
− m
i
||
n
,
(2)
where r
i+1
is the current and r
i
is the previous refer-
ence. m
i+1
is the current and m
i
is the previous mea-
sure. The MRE also uses the same scale as the data
being measured. The MRE expresses the scaling er-
rors with multiple measures based on n samples, i.e.,
the difference between reference and measurement of
n accumulated samples.
Initialization Accuracy. For each AR system we
physically align the HMD’s (measurement) coordi-
nate system, i.e., the x-axis of the body frame, with
the reference system’s coordinate system, i.e., the x-
axis of the system marked on the floor. Note, the eval-
uator provides feedback on the successful calibration,
i.e., when the reference and measurement setup are
aligned. We then calculate the translational and an-
gular differences between the AR system and the ref-
erence system. We again measure initialization accu-
racy in terms of position error and orientation error.
Relocalization Accuracy. Similarly, we use the off-
set between the coordinate systems of the AR systems
and the reference system to determine the relocaliza-
tion accuracy (both position and orientation errors) af-
ter each of the scenarios S
1
–S
5
and L
1
–L
2
.
The reliability R
i, j
∈ [−1;1] of AR
j
with j ∈
A,G,M spans from system crash [−1;0] to fully func-
tional ]0;1] per frame i and is determined as:
R
i, j
=
f eat(AR
j
) − f ail
f eat
(AR
j
)
max
f eat
(AR
j
) − f ail
f eat
(AR
j
)
, (3)
with the number of currently available features
f eat(AR
j
) in a scene, the number of features
f ail
f eat
(AR
j
) that cause AR
j
to fail (AR
j
re-
quires at least f ail
f eat
(AR
j
)+1 to estimate a pose:
AR
A
=15, AR
G
=26, AR
M
=63), and the maximal num-
ber max
f eat
(AR
j
) of features that we ever observed
for AR
j
being able to process in our experiments. It
is an engineering task to find f ail
f eat
(AR
j
). Note that
f eat(AR
j
) ≤ f ail
f eat
(AR
j
) yields a system crash.
5 EVALUATION RESULTS
We present the measurements of the small- and the
large-scale experiment, before we discuss the results.
5.1 Small-scale Measurements
Because of space restrictions we cannot show a figure
per scenario, per occluder speed, and per AR system.
We thus only show numbers and curves for the five
scenarios S
1
–S
5
(slow speed only) that were measured
with AR
M
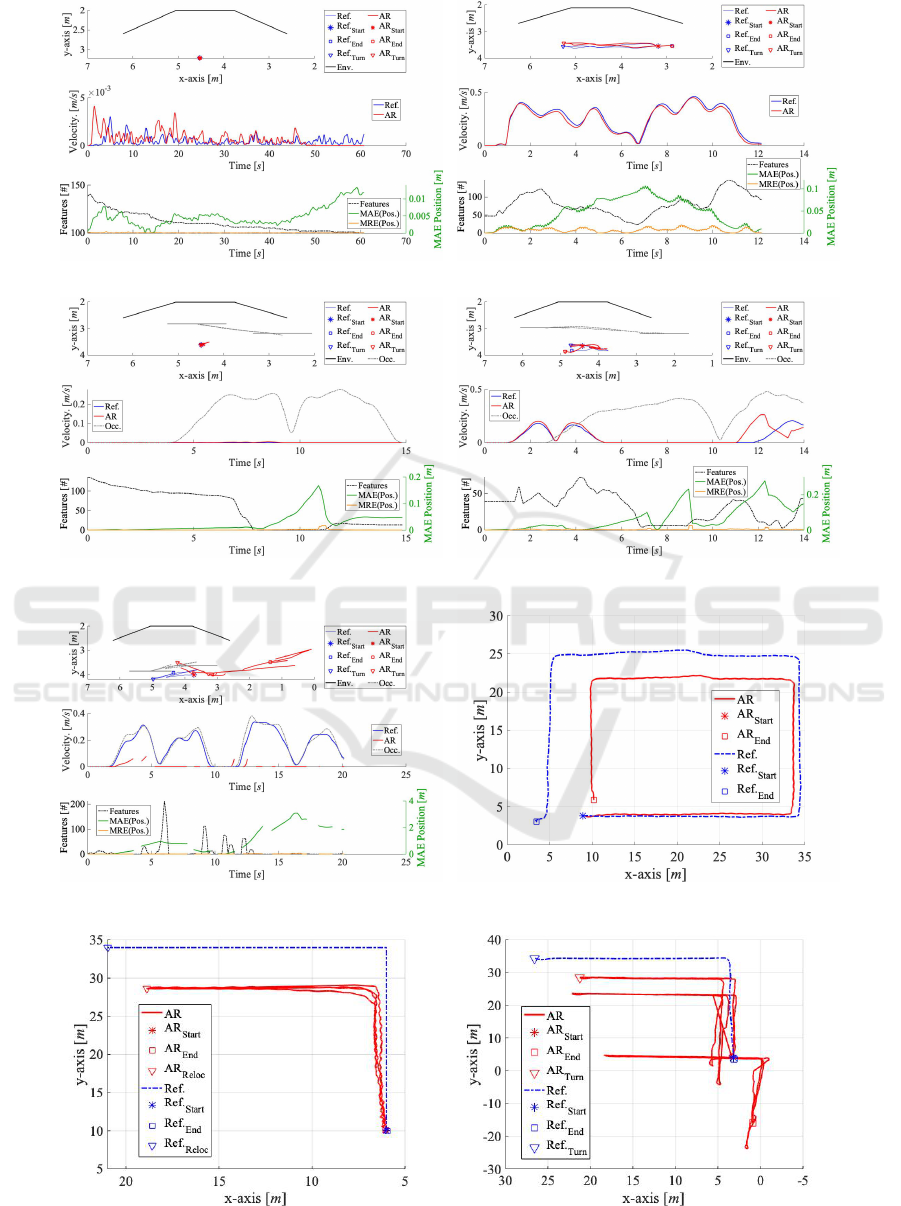
, see Figs. 7(a-e). Table 2 holds condensed
numbers for all cases. The general structure of the
five Figs. 7(a-e) is as follows: They have three graphs
each. The upper graph corresponds to the schematic
top-view known from Fig. 5. The static environment
and the occluder’s starting, turning, and final posi-
tions (S
3
–S
5
) are shown in black. For the user tra-
jectories the upper graph shows the AR
M
measure-
ments (red) and the reference values (blue). Devia-
tions between the red and blue curves, i.e., absolute
pose errors, are easy to spot. The occluder’s trajec-
tory is shown in grey. The second of the three graphs
illustrates the motion velocities of the captured poses.
The bottom graph shows the number of features f eat
over time (black, dashed) and also the position errors
MAE (green) and MRE (orange).
Measurement Results That Can Be Generalized
across S
1
–S
5
. As the user’s focus was fixed to the
environment in the small-scale experiment there were
no significant orientation errors, see the orientation
columns in Table 2. All the initialization errors are
also unremarkable throughout S
1
–S
5
and all ARs. The
initialization errors are stable across S
1
–S
5
as we al-
ways moved the features in about the same way when
setting up. The relocalization errors show no signifi-
cant changes across S
1
–S
5
and vary around 5cm. But
there is the trend that fast motion lowers and slow mo-
tion increases the relocalization errors.
The tracking accuracy is more interesting as the
position errors, the number of features, and the reli-
ability scores vary between the ARs and the scenar-
ios. Across S
1
–S
5
, AR
M
shows the smallest errors,
the highest number of features, and the best reliabil-
ity. AR
A
comes second. AR
G
suffers from the largest
errors, the lowest number of features, and the worst
reliability. The standard deviations (SD) support this:
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic Large-scale Industry Environments
313
(a) S
1
(static U, no occluder). (b) S
2
(dynamic U, no occluder).
(c) S
3
(static U, with a slow occluder). (d) S
4
(dynamic U, with a slow occluder).
(e) S
5
(dynamic U, synchronized with a slow occluder). (f) L
1
(rectangular trajectory, 100m).
(g) L
2
(cubicle walk, 120m, w. reloc. after 60m). (h) L
2
(cubicle walk, 120m, w/o intermediate reloc.).
Figure 7: AR
M
measurements; (a-e) for S
1
–S
5
: trajectories, velocities, features, and accuracy; (f-h) for L
1
–L
2
: trajectories.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
314
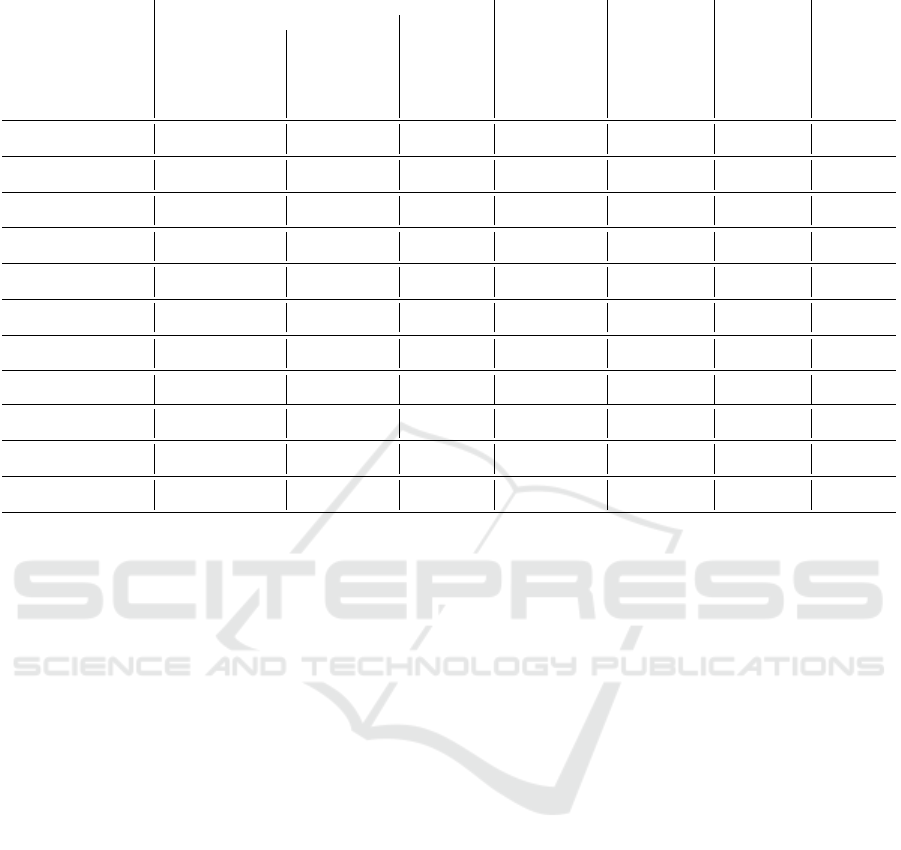
Table 2: Condensed measurements (best ones in bold).
Tracking Initialization Relocalization Features * Reliability *
Position Orientation
Scenario
MAE(AR
A
)[cm]
MAE(AR
G
)[cm]
MAE(AR
M
)[cm]
MRE(AR
A
)[cm]
MRE(AR
G
)[cm]
MRE(AR
M
)[cm]
MAE(AR
A
)[
◦
]
MAE(AR
G
)[
◦
]
MAE(AR
M
)[
◦
]
MAE(AR
A
)[cm]
MAE(AR
G
)[cm]
MAE(AR
M
)[cm]
MAE(AR
A
)[cm]
MAE(AR
G
)[cm]
MAE(AR
M
)[cm]
AR
A
[#]
AR
G
[#]
AR
M
[#]
AR
A
[%]
AR
G
[%]
AR
M
[%]
S
1
(static U , no O) 2.5 5.7 2.2 0.4 0.9 0.8 1.7 3.2 1.5 16.2 29.4 11.6 6.2 9.4 7.6 14 123 359 0 36 59
SD 2.1 2.7 1.2 0.02 0.07 0.01 0.8 2.3 0.6 7.3 11.9 5.6 2.3 4.9 1.6 1 13 57 0 0 0
S
2
(dyn. U, no O) 8.1 12.3 7.4 2.1 3.7 0.7 2.3 1.5 0.9 16.2 21.3 9.8 5.9 7.1 4.7 46 183 391 24 58 65
SD 2.2 2.8 1.9 0.9 1.3 0.8 4.1 3.8 1.7 5.9 17.1 4.9 1.7 5.3 3.2 61 137 298 35 41 43
S
3,slow
(static U , dyn. O) 17.2 19.3 13.1 4.9 5.2 4.6 2.4 4.5 2.1 18.1 29.3 8.9 9.3 19.7 6.8 18 46 143 3 7 16
SD 2.5 3.8 2.5 1.6 1.7 1.3 3.5 4.5 2.9 4.5 11.4 3.8 2.1 4.9 4.1 53 87 125 29 23 12
S
3, f ast
(static U , dyn. O) 16.3 17.1 11.0 3.9 4.1 3.4 2.4 4.5 2.1 17.9 28.1 8.7 8.2 17.3 5.5 24 61 213 7 13 30
SD 2.4 3.6 1.9 1.9 2.1 1.8 4.4 4.7 2.8 5.4 10.1 4.1 1.9 4.1 1.3 45 77 121 23 19 12
S
4,slow
(dyn. U & O) 18.1 21.2 17.8 2.4 3.5 0.9 3.7 3.9 2.5 17.2 18.3 16.8 7.9 6.8 5.2 37 103 331 17 29 53
SD 4.1 4.5 3.3 1.5 2.7 1.3 3.4 5.1 2.4 9.1 9.4 5.8 2.1 3.8 5.2 68 188 206 41 60 28
S
4, f ast
(dyn. U & O) 16.2 19.5 14.1 1.6 2.7 0.8 4.9 5.8 3.1 16.8 17.3 15.7 6.7 8.8 4.3 73 208 421 44 67 71
SD 4.1 4.5 3.3 1.5 2.7 1.3 3.4 5.1 2.4 5.8 9.4 9.1 2.1 3.8 5.2 57 166 187 32 52 25
S
5,slow
(sync. dyn. U & O) 87.3 112.9 76.3 21.8 26.4 19.1 3.9 4.3 2.4 15.7 16.8 14.9 7.3 9.8 6.4 21 37 88 5 4 5
SD 69.3 82.1 50.6 11.9 14.3 7.7 3.4 4.1 3.7 5.2 4.7 8.2 1.3 2.6 1.1 88 247 366 56 82 60
S
5, f ast
(sync. dyn. U & O) 85.1 108.3 73.2 19.7 23.8 17.3 4.6 6.1 4.0 14.9 15.9 12.8 6.5 10.7 5.9 27 54 117 10 11 11
SD 61.4 78.3 47.4 13.7 16.3 6.6 3.1 5.7 2.9 5.3 6.4 4.9 3.5 4.3 1.2 76 201 315 46 65 50
L
1
(static U , no O) - - 601.2 - - 0.7 - - 3.5 - - 32.8 - - 41.5 - - 487 - - 84
SD - - 24.3 - - 2.3 - - 1.6 - - 5.7 - - 4.3 - - 42 - - 0
L
2
(static U , no O) - - 437.9 - - 0.9 - - 4.1 - - 29.9 - - 36.2 - - 477 - - 82
SD - - 33.9 - - 1.9 - - 4.2 - - 6.3 - - 5.7 - - 56 - - 0
L
2,w/o
relocalization
- - 1728.5 - - 0.6 - - 3.8 - - 28.3 - - - - - 491 - - 85
SD - - 43.6 - - 4.1 - - 1.2 - - 5.7 - - - - - 66 - - 0
* Feature counts ([min.;max.]) for all scenarios: f eat(AR
A
) ∈ [14; 147], f eat(AR
G
) ∈ [25; 296], and f eat(AR
M
) ∈ [62; 567].
there is lower variance for AR
M
(within and across all
measures) than for AR
A
. AR
G
has the highest SD.
Now that we have sketched the big picture, let us
discuss the scenarios individually.
Measurement Results That Are Specific for S
1
–S
5
.
S
1
and S
2
yield the lowest absolute and relative posi-
tion errors and orientation errors in all measures for
all ARs. While S
1
yields the lowest MAE of the po-
sition (2.2cm) and orientation (0.9
◦
), S
2
provides the
lowest MRE of the position (0.3cm) across all exper-
iments. In Figs. 7(a+b) we observe that when there
is no velocity in S
1
the number of features remains
stable. With dynamics in S
2
there is also a varying
number of features. The reliability scores in Table 2
support these findings as there are higher scores when
the user moves faster (or moves at all).
Compared to S
1
–S
2
, there are higher absolute and
relative position errors and orientation errors in S
3
and S
4
, see Table 2. As before, a moving user
yields higher absolute position errors (MAE>10cm)
but lower relative errors (MRE<1cm), even if there
is an occluder. This also holds for the two fast mo-
tion variants. Figs. 7(c+d) again show that a more
dynamic user sees more features, which then results
in a higher reliability score. In S
3
the movement of
the occluder has a dramatic impact on the number of
features and the reliability scores: both drop to lower
values once the occluder hides E
2
, and they remain
on that level when the occluder leaves the user’s FoV
again. We discuss this in detail in Sec. 6.
S
5
yields the highest position and orientation er-
rors of all measurements with all ARs. This time the
absolute position error is more than 5 times higher
for all ARs. Also the number of features and the re-
liabilities are the lowest among all experiments. The
user moves synchronously at the same speed in the
same direction as the occluder. For the user, the oc-
cluder’s features do not move, as they move quasi par-
allel to his/her FoV, see the red curve in the velocity
graph of Fig. 7(e). Hence, the ARs cannot distinguish
between their self-motion and the motion of the oc-
cluder’s features. In total, the ARs interpret this as if
there is no movement at all. Because even in these sit-
uations, they apparently do not use inertial sensors to
sense motion and continue to rely solely on the cam-
era’s motion estimates. However, due to the study de-
sign there may be moments when the ARs still occa-
sionally find features to stabilize their internal feature
tracking state.
5.2 Large-scale Measurements
For our large-scale experiments we can only show the
measurements of AR
M
because both AR
A
and AR
G
were unable to initialize and localize. The bottom
rows of Table 2 and Figs. 7(f-h) hold the data. The
graph layouts correspond to the schematic top-view
known from Fig. 6. For the user trajectories they show
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic Large-scale Industry Environments
315

Table 3: Average scaling error in the large-scale scenarios.
Distance, SD, td [m] Scaling Error, SD
L
1
100, 9, 101.2 5.94cm/m, 0.21cm
L
2
60, 3, 62.8 6.97cm/m, 0.19cm
L
2,w/o
120, 12, 118.76 14.55cm/m, 2.83cm
both the AR measurements (red) and the reference val-
ues (blue). Again, deviations, i.e., absolute pose er-
rors, are easy to spot.
Measurement Results That Can Be Generalized
across L
1
–L
2
. As before, the orientation, initializa-
tion, and relocalization errors are unremarkable, see
Table 2. However, because of the much larger dis-
tances both the initialization and relocalization errors
are higher than for S
1
–S
5
, but they show similar vari-
ances. The number of features is higher for L
1
–L
2
(at
lower variance) than for S
1
–S
5
and results in the high-
est reliability values across all experiments.
Table 2 shows that the absolute position errors
grow with the length of the trajectory that is traveled
without relocalization (60m in L
2
, 100m in L
1
, and
120m in L
2
). This can also be seen in Figs. 7(f-h).
When you follow the trajectory of the user along the
space, the distances between the red and blue curves
grow. When there is no intermediate relocalization,
the effect is much stronger than in plain L
2
. After
each measurement or in the intermediate relocaliza-
tion phase we calculated the scaling error S=
MAE
position
td
where td is the traveled distance, see Table 3. Note,
that the distance and td differ because of the SD.
Whereas the scaling error is about the same
for L
1
and L
2
with a relocalization after 60m,
(6.65cm/m (=5.94+6.97/2) on average), it ”explodes”
(14.4cm/m) in L
2
when no relocalization is done for
about 120m. We discuss this in detail below.
6 DISCUSSION
The occluder-free scenarios S
1
and S
2
yield the lowest
absolute position error for all ARs. This is because the
SLAM techniques are able to separate a user’s self-
motion from the static environment. In contrast, the
techniques struggle to accurately tell self-motion and
feature motion (of the occluder) apart. This is sup-
ported by the scenarios S
3
–S
5
that yield higher abso-
lute errors when an occluder is present and when the
occluder hides the features of the environment longer
or more often.
Velocity has an impact. Although, a higher ve-
locity leads to blurry camera images and hence fewer
features, our motion scenarios resulted in more fea-
tures and a better relative position accuracy. We think
that faster movement reduces the duration of situa-
tions where there is an occluder in the FoV of the user,
and therefore the duration of a disturbance is shorter,
which leads to smaller accumulated errors.
We suppose that SLAM implementations make
use of an internal filter that estimates the position in
case of a noisy input (a varying number of features
or unknown features), i.e., when there are dynamics
of either U or O or both. After a while, the AR sys-
tems stabilize the filter with ground truth knowledge
(known features) and relocalize. What supports this
assumption is the slight delay and offset that exist be-
tween the number of features and the position errors
in the graphs in Figs. 7(d) (compare the ”Features”
and the ”MAE” curves within the [4.5s;6s] interval in
the bottom graph).
In all our scenarios there is an inverse correlation
between a high reliability score (number of features)
and a low MRE of the position (and vice versa). There
is no such inverse correlation with the MAE. On the
contrary, especially in the L
i
scenarios when the R
is high, the MRE is low, but the MAE is also high.
We suppose that the initialization and relocalization
errors have a stronger impact on the MAE than the
number of features. This is in line with findings by
(Marchand et al., 2016; Terashima and Hasegawa,
2017) as VISLAM for the ARs works like a pedestrian
dead reckoning (PDR) algorithm. Here, the initial-
ization and relocalization errors stabilize the absolute
position while the relative position updates (estimated
based on the features) accumulate small errors (with
more features) over time (scaling error).
The impact of the scaling errors (accumulation of
small relative position errors) depends on the scale.
There is little impact in the small-scale scenarios, but
the AR measurements and the reference positions dif-
fer a lot in the large-scale scenarios. This indicates
that the AR systems exploit both the initialization
and relocalization to stabilize the absolute positions.
However, when they internally are confident about the
input (no varying or unknown features) they rely on
the relative position estimates. Hence, for SLAM to
perform best, both MAE and MRE must be reduced.
We think that the reason for AR
M
performing sig-
nificantly better (in all measures, in all scenarios) than
AR
A
or AR
G
is that AR
M
exploits a special RGB − D
sensors, while the other only use a single RGB sen-
sor. As there is no such hardware difference between
AR
A
and AR
G
a potential explanation why AR
A
out-
performs AR
G
may be that its SLAM is better opti-
mized for its sensors.
In scenarios with relocalization and high reliabil-
ity the ARs achieve a low MRE but a high MAE of the
position. But with a long trajectory even a small rel-
ative error accumulates and grows into a significant
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
316

relative drift and absolute offset. In the large-scale
scenarios the absolute error lineraly increases as there
is an average scaling error of approximately 5.9cm/m
if there are intermediate relocalizations after at most
100m. However, we postulate that this linearity only
holds when there are no changes or only slight rota-
tions of up to 90
◦
in the movement direction. The
counterexample (S=14.5cm/m) is L
2
without relocal-
ization and with its abrupt 180
◦
rotation.
The general applicability of the reliability score R
(soley based on features) cannot be guaranteed, as we
saw that there are situations when a higher R does not
correlate with the MAE but with the MRE of the po-
sition. Because a single metric as the MRE, is not
enough to evaluate and validate accuracy and reliabil-
ity of ARs our R could be improved.
Although there are many other AR platforms to-
day, e.g., Wikitude (Fraga-Lamas et al., 2018), we
chose AR
A
, AR
G
, and AR
M
because they are mar-
ketable, inexpensive, pre-installed, and widely used
by our industrial customers. We focused on these
three commercial systems as these are well estab-
lished in both the consumer and industrial markets
and therefore their manufacturers offer customer sup-
port. Industrial customers are unwilling to work with
research and development versions of AR systems
just because they provide more accurate positions in
some special cases.
7 CONCLUSION
We studied the applicability of today’s popular AR
systems (Apple ARKit, Google ARCore, and Mi-
crosoft Hololens) in industrial contexts (large area of
1,600m
2
, walking distances of up to 120m between
cubicles, and dynamic environments with volatile nat-
ural features). The Hololens with its special RGB-D
sensors outperformed ARKit (RGB only) in all exper-
iments. ARCore showed the worst results.
In a nutshell, we found that standing still does
not result in any features while motion enables the
detection of features. However, abrupt movement
changes at high speeds reduce the number of de-
tectable features. A low/high number of features
yields a low/high reliability. And a low/high reliabil-
ity results in high/low relative and absolute position
errors. Low/high position errors enable/disable AR
systems in large scale industry environments.
Regardless of the AR systems, we only found good
position accuracies in static environments and when
only the user moves. Having more identifiable fea-
tures helps. Whereas movement results in detectable
features and hence in reliabilities and relative position
accuracies, on longer trajectories and at higher veloc-
ities there is still a significant amount of accumulated
drift. Hence, AR systems are applicable in industry
settings when a worker’s surroundings are static and
when process streets between cubicles are short and
only require smooth directional changes.
When relocalization is possible within at least
100m of the trajectory, the AR systems accumulate a
linear scaling error of 6.65cm/m, on average. When
there is no intermediate relocalization available, the
best system only yields a MAE of 17.28m per 120m,
with a scaling error of up to 14.4cm/m, which is
clearly too much for industry-strength applications.
We identified two typical industry scenarios that
revealed problems of the AR systems: (a) They tend
to crash when a user moves while a surrounding ob-
ject, e.g., a fork lift, synchronously moves on the side.
(b) There are system instabilities when workers ran-
domly enter or leave the field of view of the AR sys-
tem and temporarily occlude known features (as the
systems can hardly distinguish between self-motion
and feature motion).
ACKNOWLEDGMENTS
This work was supported by the Bavarian Min-
istry for Economic Affairs, Infrastructure, Trans-
port and Technology through the Center for Ana-
lytics—Data—Applications (ADA-Center) within the
framework of “BAYERN DIGITAL II”.
REFERENCES
Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J.,
Omari, S., Achtelik, M. W., and Siegwart, R. (2016).
The EuRoC micro aerial vehicle datasets. Intl. J. of
Robotics Research, 35(10):1157–1163.
Choset, H. M., Hutchinson, S., Lynch, K. M., Kantor,
G., Burgard, W., Kavraki, L. E., and Thrun, S.
(2005). Principles of robot motion: theory, algo-
rithms, and implementation. Intelligent Robotics and
Autonomous Agents. MIT Press, Cambridge, USA.
Cort
´
es, S., Solin, A., Rahtu, E., and Kannala, J. (2018). AD-
VIO: An authentic dataset for visual-inertial odom-
etry. In Proc. European Conf. Computer Vision
(ECCV), pages 419–434, Munich, Germany.
Dilek, U. and Erol, M. (2018). Detecting position us-
ing ARKit II: generating position-time graphs in real-
time and further information on limitations of ARKit.
Physics Education, 53(3):5–20.
Durrant-Whyte, H. and Bailey, T. (2006). Simultaneous lo-
calization and mapping: part I. Robotics & Automa-
tion Magazine, 13(2):99–110.
Localization Limitations of ARCore, ARKit, and Hololens in Dynamic Large-scale Industry Environments
317

Feigl, T., Mutschler, C., and Philippsen, M. (2018). Super-
vised learning for yaw orientation estimation. In Proc.
Intl. Conf. Indoor Navigation and Positioning (IPIN),
pages 103–113, Nantes, France.
Fraga-Lamas, P., Fern
´
andez-Caram
´
es, T. M., Blanco-
Novoa,
´
O., and Vilar-Montesinos, M. A. (2018). A
review on industrial augmented reality systems for the
industry 4.0 shipyard. In Proc. Intl. Conf. Intelligent
Robots and Systems (IROS), pages 131–139, Madrid,
Spain.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The KITTI dataset. Intl. J. of
Robotics Research, 18(17):6908–6926.
Handa, A., Whelan, T., McDonald, J., and Davison, A. J.
(2014). A benchmark for RGB-D visual odometry,
3D reconstruction and SLAM. In Proc. Intl. Conf.
Robotics and Automation (ICRA), pages 1524–1531,
Hong Kong, China.
Kasyanov, A., Engelmann, F., St
¨
uckler, J., and Leibe, B.
(2017). Keyframe-based visual-inertial online SLAM
with relocalization. In Proc. Intl. Conf. Intelligent
Robots and Systems (IROS), pages 6662–6669, Van-
couver, Canada.
Kato, H. and Billinghurst, M. (1999). Marker tracking and
HMD calibration for a video-based augmented reality
conferencing system. In Proc. Intl. Workshop on Aug-
mented Reality (IWAR), pages 85–94, San Francisco,
CA.
Kerl, C., Sturm, J., and Cremers, D. (2013). Dense visual
SLAM for RGB-D cameras. In Proc. Intl. Conf. Intel-
ligent Robots and Systems (IROS), pages 2100–2106,
Tokyo, Japan.
Klein, G. and Murray, D. (2007). Parallel tracking and
mapping for small AR workspaces. In Proc. Intl.
Workshop on Augmented Reality (ISMAR), pages 1–
10, Nara, Japan.
L
¨
offler, C., Riechel, S., Fischer, J., and Mutschler, C.
(2018). Evaluation criteria for inside-out indoor po-
sitioning systems based on machine learning. In Proc.
Intl. Conf. Indoor Positioning and Indoor Navigation
(IPIN), pages 1–8, Nantes, France.
Li, P., Qin, T., Hu, B., Zhu, F., and Shen, S. (2017).
Monocular visual-inertial state estimation for mobile
augmented reality. In Proc. Intl. Conf. Intelligent
Robots and Systems (IROS), pages 11–21, Vancouver,
Canada.
Li, W., Saeedi, S., McCormac, J., Clark, R., Tzoumanikas,
D., Ye, Q., Huang, Y., Tang, R., and Leuteneg-
ger, S. (2018). Interiornet: Mega-scale multi-sensor
photo-realistic indoor scenes dataset. arXiv preprint
arXiv:1809.00716, 18(17).
Linowes, J. and Babilinski, K. (2017). Augmented Real-
ity for Developers: Build practical augmented reality
applications with Unity, ARCore, ARKit, and Vuforia.
Packt Publishing Ltd, Birmingham, UK.
Liu, H., Chen, M., Zhang, G., Bao, H., and Bao, Y.
(2018). Ice-ba: Incremental, consistent and efficient
bundle adjustment for visual-inertial SLAM. In Proc.
Intl. Conf. Computer Vision and Pattern Recognition
(CVPR), pages 1974–1982, Salt Lake City, UT.
Marchand, E., Uchiyama, H., and Spindler, F. (2016). Pose
estimation for augmented reality: A hands-on sur-
vey. Trans. Visualization and Computer Graphics,
22(12):2633–2651.
Marques, B., Carvalho, R., Dias, P., Oliveira, M., Fer-
reira, C., and Santos, B. S. (2018). Evaluating and
enhancing Google Tango localization in indoor en-
vironments using fiducial markers. In Proc. Intl.
Conf. Autonomous Robot Systems and Competitions
(ICARSC), pages 142–147, Torres Vedras, Portugal.
Mur-Artal, R. and Tardos, J. D. (2017). ORB-SLAM2: An
open-source SLAM system for monocular, stereo, and
RGB-D cameras. Trans. Robotics, 33(5):1255–1262.
Neumann, U. and You, S. (1999). Natural feature tracking
for augmented reality. Trans. on Multimedia, 1(1):12–
20.
Palmarini, R., Erkoyuncu, J. A., and Roy, R. (2017). An
innovative process to select augmented reality (AR)
technology for maintenance. In Proc. Intl. Conf. Man-
ufacturing Systems (CIRP), pages 23–28, Taichung,
Taiwan.
Regenbrecht, H., Meng, K., Reepen, A., Beck, S., and Lan-
glotz, T. (2017). Mixed voxel reality: Presence and
embodiment in low fidelity, visually coherent, mixed
reality environments. In Proc. Intl. Conf. Intelligent
Robots and Systems (IROS), pages 90–99, Vancouver,
Canada.
Saputra, M. R. U., Markham, A., and Trigoni, N. (2018).
Visual SLAM and structure from motion in dynamic
environments: A survey. Comput. Surv., 51(2):1–36.
Schubert, D., Goll, T., Demmel, N., Usenko, V., St
¨
ockler,
J., and Cremers, D. (2018). The TUM VI benchmark
for evaluating visual-inertial odometry. In Proc. Intl.
Conf. Intelligent Robots and Systems (IROS), pages
6908–6926, Madrid, Spain.
Simon, G., Fitzgibbon, A., and Zisserman, A. (2000).
Markerless tracking using planar structures in the
scene. In Proc. Intl. Workshop Augmented Reality (IS-
MAR), pages 120–128, Munich, Germany.
Taketomi, T., Uchiyama, H., and Ikeda, S. (2017). Vi-
sual SLAM algorithms: a survey from 2010 to 2016.
Trans. Computer Vision and Applications, 9(1):452–
461.
Terashima, T. and Hasegawa, O. (2017). A visual-SLAM
for first person vision and mobile robots. In Proc. Intl.
Conf. Intelligent Robots and Systems (IROS), pages
73–76, Vancouver, Canada.
Vassallo, R., Rankin, A., Chen, E. C. S., and Peters, T. M.
(2017). Hologram stability evaluation for Microsoft
Hololens. In Proc. Intl. Conf. Robotics and Automa-
tion (ICRA), pages 3–14, Marina Bay Sands, Singa-
pore.
Voinea, G.-D., Girbacia, F., Postelnicu, C. C., and Marto, A.
(2018). Exploring cultural heritage using augmented
reality through Google’s Project Tango and ARCore.
In Proc. Intl. Conf. VR Techn. in Cultural Heritage,
pages 93–106, Brasov, Romania.
Yan, D. and Hu, H. (2017). Application of augmented real-
ity and robotic technology in broadcasting: A survey.
Intl. J. on Robotics, 6(3):18–27.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
318
