
Modelling Movement Time for Haptic-enabled Virtual Assembly
Samir Garbaya
1a
and Vincent Hugel
2
1
END-ICAP Laboratory - INSERM, Arts et Metiers Institute of Technology,
CNAM, LIFSE, HESAM University, F-75013, Paris, France
2
Laboratoire Cosmer, Université de Toulon, CS 60584 83041, Toulon Cedex 9, France
Keywords: Human Computer Interaction, Fitts' Law, Virtual Assembly, Haptic Feedback.
Abstract: Mechanical assembly consists of joining two or more components together. Manual assembly tasks include
different activities to obtain functional products. In order to estimate the assembly cost and elaborate the
assembly plan for a product, it is important to measure the duration of the assembly operations. The research
reported in this paper aims at investigating if Fitts’ law, which has been widely adopted in numerous research
areas including kinematics, human factors and human-computer interaction, can be adopted as a model to
estimate the movement time in assembling parts in virtual assembly environment with haptic feedback. The
results reported in this paper showed that Fitts’ law can be applied for modelling the movement time in
assembling cylindrical parts. However, the analysis of the experimental data showed that when changing the
diameter of the moved part, this could have an effect on the movement time. This is promising for the
formulation of an inverted Fitts’ law for cylindrical parts’ assembly.
1 INTRODUCTION
Global competition has forced manufacturers to
reduce production cycles and enable product design
agility. In general, a manufacturing process is divided
into product design, process design, manufacturing
and assembly. The attempts to accelerate the process
through the development of computer aided assembly
planning systems have not, in general, been
successful although the design has been carried out
using a modern CAD system (De Mello &
Sanderson). One of the main reasons for this lack of
success is that assembly is dependent on a great deal
of expert knowledge, which has proved to be very
difficult to formalize (Dewar, Carpenter, Ritchie, &
Simmons, 1997), (Nevins & Whitney, 1980). The
important advances made in the recent decades in
virtual reality technologies provided intuitive
approaches for virtual interaction, notably for the
virtualization of assembly operations and planning.
Instead of abstract algorithmic assembly planning, an
engineer could perform the assembly intuitively in
virtual environment (VE) using VR hardware and
software (Gupta, Whitney, & Zeltzer, 1997).
a
https://orcid.org/0000-0003-0676-8320
Assembling mechanical products by manipulating
virtual parts provides an information feedback to the
designer in order to refine the product design based
on the information obtained from the assembly trials
and the degree of feasibility of the assembly sequence
generated from the interaction with VE (Boothroyd,
Geoffrey. Dewhurst, Peter. Knight, 1994), (Santochi
and Dini, 1992). However, in order to obtain reliable
information from the interaction with the virtual
world, human behavior in the VE should be similar to
the behavior in real world. The virtual assembly
environment must provide the user with the illusion
of manipulating real parts. As such, the environment
must replicate the relevant characteristics of the real
assembly shop floor. Additionally, before using the
VE for complex interaction such as assembly
planning, it is important to show that the knowledge
obtained from the real world interaction, such as Fitts’
law, are also valid in VE. Then, quantitative and
qualitative information derived from the VE, such as
the assembly time of the vittual product and the
assembly plan, can be used for the design the
production system and for planning the activities in
the real world.
An assembly task can be divided into six basic
Garbaya, S. and Hugel, V.
Modelling Movement Time for Haptic-enabled Virtual Assembly.
DOI: 10.5220/0009038400530063
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 2: HUCAPP, pages
53-63
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
53
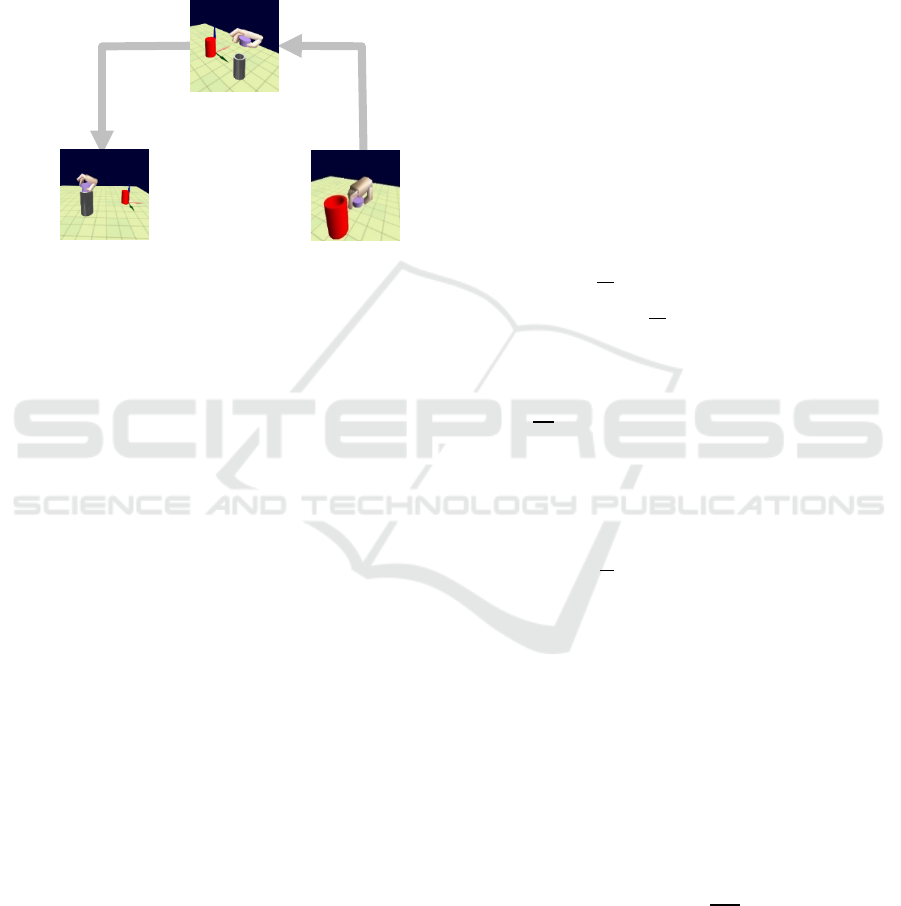
activities such as reach, select, grasp, move, position,
and secure. Activities such as "reach" and "move" are
generated by biomechanics of body motions.
However, the activities such as “select”, “grasp”,
“position”, and “secure” require cognitive skills and
manual dexterity (Figure 1). For these reasons, the
estimation of the time necessary to assemble a
product is an important information for industry.
Figure 1: Segmentation of the manual assembly task.
Fitts' popular model has been proven one of the
most robust, highly cited and widely adopted models
to emerge from experimental psychology (Fitts,
1954), (Fitts & Peterson, 1964). It was applied in
numerous research areas; including kinematics,
human factors, and human-computer interaction
(Kerr & Langolf, 1977), (Hand, 1997). Psychomotor
studies in diverse settings have consistently shown
high correlation between Fitts’ index of difficulty and
the time to complete a movement task. Kinematics
and human factors are two fields particularly rich in
investigations of human performance using Fitts’
analogy (Fitts & Radford, 1966). Virtual reality offers
the potential to improve techniques over existing
computer interfaces, therefore offering benefits to
applications requiring human-computer interaction.
However, to obtain reliable results from VR, high
perceptual capabilities must be achieved and human
related factors should be taken into account in
designing 3D interfaces for the interaction with VE.
The literature review showed that most of the
reported studies used task completion time (TCT) and
error rates for the evaluation of the human
performance in VE. However, well-known paradigms
such as Fitts’ law were not used as a tool to validate
virtual environments before their adoption in the
product development (Chryssolouris, Mavrikios,
Fragos, & Karabatsou, 2000). For example, the
extrapolation of performance data obtained in VE to
the real world could only provide good results if the
characteristics of the VE allow the same interactive
conditions as in the real world.
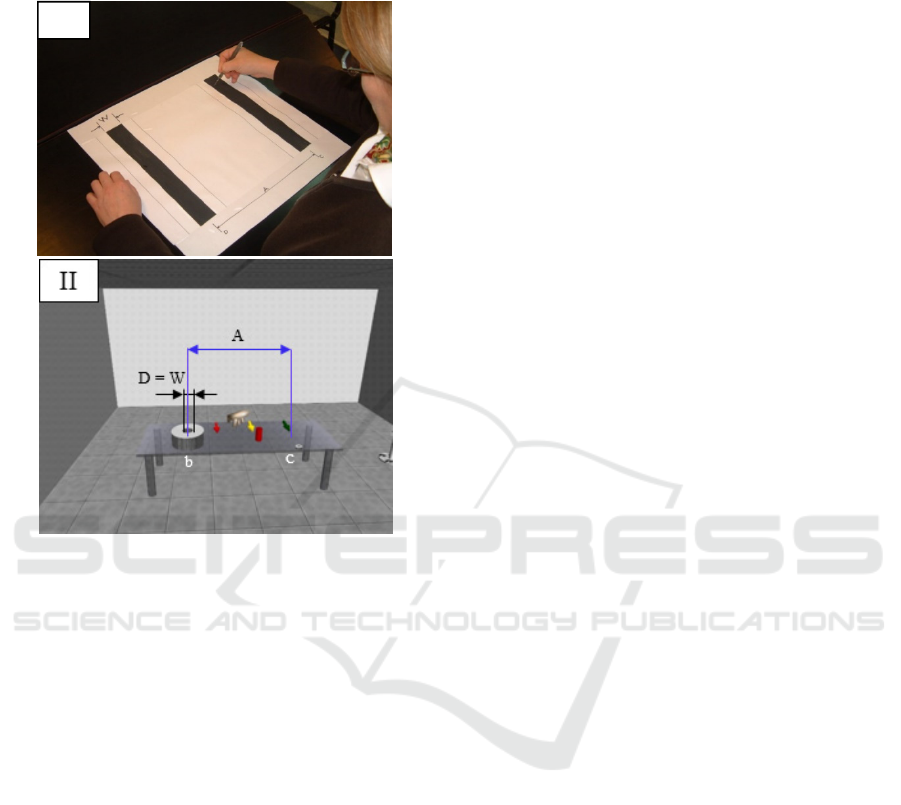
In Fitts' experiment, the subject had to move a pointed
stylus as quickly as possible between two fixed
targets of width (W) set at a distance (A). The task
requires also hitting the two targets alternatively
(Figure 2.I). The analysis of the original Fitts’ law
experiment and the assembly of cylindrical parts
shows an analogy in the movement of the operator’s
hand in executing the task (Figure 2.II). Paul Fitts
suggested that the difficulty of a task could be
measured using the information metric bits, and he
introduced the idea that, the information is
transmitted through a human sensory channel when
carrying out a movement task (Fitts, 1954), (Langolf,
Chaffin, & Foulke, 1976). Fitts' equation for the
movement time (MT) is given by:
= +
(1)
=
in bits per response (2)
= +
in seconds (3)
Where ID is the Index of Difficulty and a, b are
constants.
The task index of performance (IP) is defined as
=
in bits/second.
Sturges and Kilani applied Fitts' law index of
difficulty (ID) to quantify the dexterity and time
required to assemble a product (Sturges & Kilani,
1992). They formulated the task index of difficulty
as = 2 (
) where W is the target width and S
the distance between the two parts to be assembled.
The manual assembly time is then obtained by
multiplying the ID by the human motor capacity.
However, this method did not investigate if the shapes
of the manipulated parts have any effect on the index
of difficulty, hence on the operator’s performance in
the execution of the assembly task.
(Gupta et al., 1997) reported on a 'peg in hole' task
performed using a PHANTOM device as a force
feedback system to manipulate a virtual peg in a hole.
The task index of difficulty was measured using Fitts'
law and by substituting the target width W for the
peg/hole clearance. Their formulation for the index of
difficulty was = 2
where h is the
handling distance; D is the diameter of the hole and d
is the diameter of the peg. The results indicated that
despite the provision of force feedback, a
significantly longer total assembly time was obtained
compared with the stable performance in the real task.
The increase of the assembly time might be originated
Position and
Secure
Grasp
Move
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
54
from the 3D interaction technique they used or the
lack of physical behavior of parts not included in the
virtual environment they developed.
Figure 2: The analogy between the original Fitts’ law (I)
and the assembly of cylindrical parts in virtual environment
(II).
(Deng, Geng, Hu, & Kuai, 2019) studied the
factors determining the movement time (MT) of
positioning an object in an immersive 3D virtual
environment where they varied three factors: the
object size, the movement amplitude and the target
tolerance. They identified three phases: the
acceleration phase, the deceleration phase and the
correction phase. They found that in the acceleration
phase, the movement time (MT) was inversely related
to object size and positively proportional to
movement amplitude but in the deceleration phase,
the (MT) was mainly determined by the movement
amplitude. In the correction phase, the (MT) was
affected by all three factors. Hence, they proposed a
three-phase model with different formulae at each
phase.
(Liu & Liere, 2011) introduced a 3D introduced a
model for the interaction with moving objects in
virtual environment. They divided the movement task
into two phases: the tacking phase and the connection
phase. According to their experiments, they found
that the time for the tracking phase is fixed once a task
has been established, However, the time for the
correction phase is dependent on the path length, the
velocity of the moving target and its width. The
authors considered that the movement time of an
object pursuit task can be minimized by determining
the optimum target velocity and that their model can
be used for the evaluation of the user interfaces
designed for the interaction with moving objects.
(Cha & Myung, 2013) developed an extended
Fitts’ model for pointing task in 3D environment. The
authors added to the formulation of the original Fitts’
law the inclination and azimuth angles of the
spherical coordinate system. The extended model
showed better adequacy with the data collected from
the experiments in terms statistical values of the
correlation coefficient and the standard error of the
residuals for the measured and predicted movement
time. These results were considered by the authors
important for the design of pointing tasks in 3D
environment and for accurate prediction of human
performance.
(Raghu Prasad, Purswani, & Manivannan, 2013)
developed and experiment to predict the minimum
movement time for a task involving the right index
finger carried out in virtual environment. The analysis
of the collected data for the movement time and the
index of difficulty showed that Fitts’ law is applicable
for a force based virtual movement task with visual
guidance.
(Lin, Caesaron, & Woldegiorgis, 2019) studied
the accuracy the accuracy of egocentric distance
estimation in stereoscopic virtual environment. They
investigated different interaction methods with 3D
objects by designing an acquisition task involving
direct pointing and indirect cursor techniques. They
found that indirect interaction mode allowed more
accuracy than direct mode and higher accuracy was
obtained for pointing task located at greatest distance
from the user. They also reported that high task
difficulty led to low accuracy level compared to the
accuracy obtained for medium and low task diculty.
The authors consider their work useful for the design
of effective interaction techniques where the accuracy
is an important factor.
(Schwind, Leusmann, & Henze, 2019) studied
investigated the effect the changes of model and
texture of a users' avatar on input performance in a
two-dimensional Fitts' law target selection task. Their
research showed that task completion time was not
affected neither by model nor texture changes, which
supports that body ownership and spatial localization
are independent the mechanism in visual-haptic
integration.
(Gallegos-Nieto, Medellín-Castillo, González-
Badillo, Lim, & Ritchie, 2017)studied the transfer of
I
Modelling Movement Time for Haptic-enabled Virtual Assembly
55

knowledge and skills from haptic-enabled virtual
assembly environment to real-world. They used a
system called Haptic Assembly and Manufacturing
System (HAMS) developed by (Gonzalez-Badillo,
Medellin-Castillo, Lim, Ritchie, & Garbaya, 2014).
The authors conducted an experiment involving three
groups of subjects and three training modes: Virtual
assembly including haptic feedback, virtual assembly
without haptic and training by watching a video.
Compared to training by video, virtual assembly
allowed up to 80% improvement in the performance
of the real assembly task. Additionaly, training with
haptic-enabled virtual assembly led to greater levels
of effectiveness than without haptics. It was also
noticed that training with virtual assembly showed
more effectiveness for more complex assembly task.
(Sagardia & Hulin, 2017) developed a platform
for bimanual haptic feedback for the assembly of
complex virtual objects. The haptic device was made
of two DLR/KUKA robot arms that include an
additional force-torque sensor at each robot wrist and
it displays six-DoF force feedback. The objective of
their research was to solve the virtual assembly
problems such as assembling objects with complex
geometries, bimanual six-DoF haptic interaction for
hands and arms, and intuitive navigation in large
workspaces. The authors conducted an experiment of
assemblig a car control box to test their system. The
results showed that it was able to handle complex
geometries and it allowed large upper body
movements with providing force and tactile feedback
to the hand and the forearm of the user.
(Wang, Huang, Li, & Liu, 2017) proposed a new
model for simulating forces for virtual assembly tasks
of mechanical parts with a clearance fit. They
decomposed the assembly operation into free
navigation state, positioning state and assembly state.
Upon the contact between parts, a collision force is
simulated and the assembly process enters the
positioning state. For enhancing the user perception,
they developed a model for the force rendered during
the assembly state. The system was evaluated for the
assembly of four sets of shaft-bushing with clearance
fits and the results showed that force rendering was
appreciated by the user eventhough shoter task
completion time was obtained without providing
force rendering.
(Lubos, Bruder, & Steinicke, 2015) analyzed the
impact of comfort on 3D selection tasks in an
immersive desktop setup. They investigated the
importance of comfort for the performance in 3D user
interfaces by analysing a set of most comfortable
body poses for the interaction. They studied the
influence of a comfortable arm rest on performance
in immersive desktop setups to allow users to
experience the immersive interaction without the
negative aspects and to increase the user comfort. The
authors conducted Fitts’ Law experiment in
immersive desktop setups. The results showed that
comfort has a significant effect on effective
throughput according to Fitts’ Law in IVEs.
(Sallnäs & Zhai, 2003) Investigated how handling
over objects can be supported in virtual environment.
They carried out an experiment in which subjects
passed a series of cubic objects to each other and
tapped them at target areas. The user performance
was evaluated for the conditions where haptic
feedback is provided and not provided in the
interaction. The authors considered their study in the
framework of Fitts’ law and hypothesized that object
hand off represented a collaboratively performed
Fitts’ law task. The results showed that task
completion time was increased with Fitts’ index of
difficulty, both with and without haptic feedback. The
time required for passing objects did not differ
significantly between the haptic and no haptic
conditions. However, the provision of haptic
feedback allowed to reduce significantly the error
rate.
In order to study the validity of Fitts’ law in VE,
we have developed a set of experiments in which a
human operator performs the task of assembling two
cylindrical parts. The objective is to investigate if
Fitts’ law could be applied for the estimation of the
movement time for the assembly of cylindrical parts.
Moreover, whether the human performance patterns
are similar to that obtained in the original experiments
of Paul Fitts. The task studied in this research is
inverted: instead of a pointed stylus, the probe is a
virtual mechanical part of finite width; it is moved to
a target location that is of smaller width than the
probe. These conditions represent the inverted Fitts'
law paradigm in which the moved object has a larger
width that the target object. These conditions are
common in assembly industry. The objective is to
investigate if the diameter of the moved part has an
effect on the movement time of the assembly task. In
these experiments, the sensation of the weight of the
manipulated parts and the contact forces are provided
to the operator using six degrees of freedom (DOF)
force feedback system (figure 3).
In order to study the movement time, an
experiment of assembling cylidrical parts was
designed in virtual environment. The task execution
was observed and the performance of the operator
was measured in terms of the task completion time
(Cochran & Cox, 1950).
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
56
2 ARCHITECTURE OF THE
VIRTUAL REALITY SYSTEM
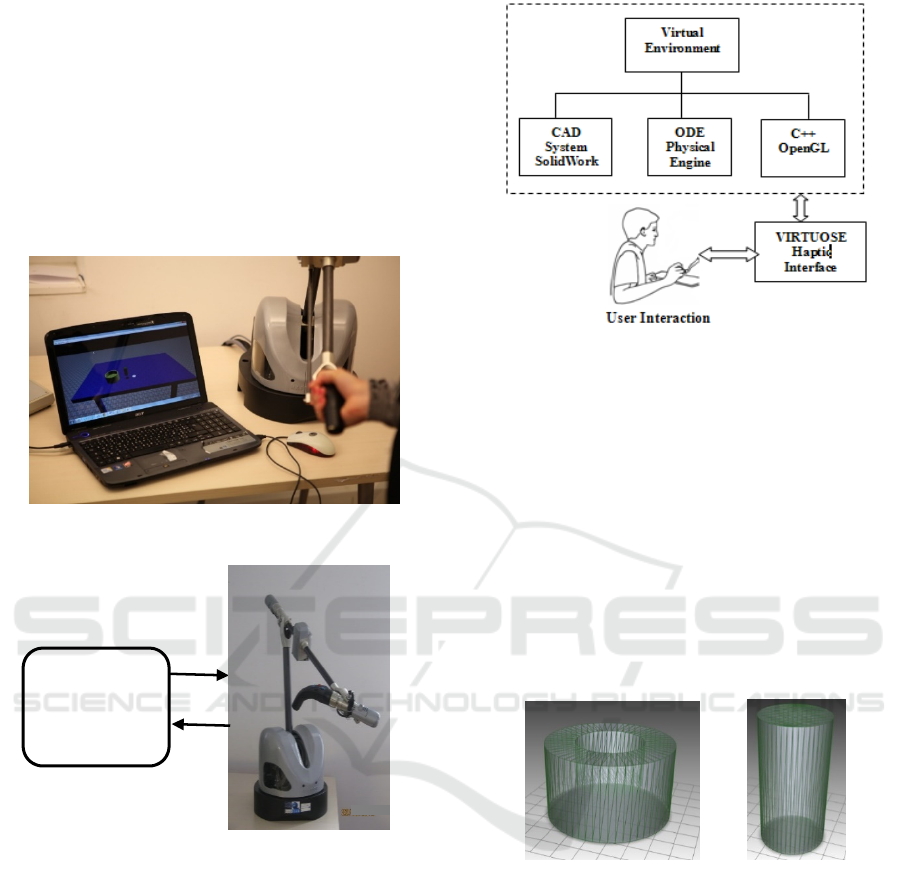
The VE software runs on a laptop PC equipped with
a 2.20 GHZ Intel Dual Core processor and an ATI
Mobility Radeon graphics card. The virtual scene was
created in C++, using OpenGL library, and visualized
on the computer screen of 15.6 inches. The frame rate
of the image display was maintained at 35 frames per
second (Figure 3).
Figure 3: Hardware platform used in the experiments.
Figure 4: Principle of the generation of force feedback with
the VIRTUOSE haptic device.
In order to provide the operator with force
feedback during the manipulation of parts, the
VIRTUOSE™ 6D haptic interface was used. This
haptic interface system has 6 DOF (3 translations and
3 rotations) and renders 3D force and torque (Figures
4 and 5). Although the weight of the pointed stylus
was not taken into consideration in the original study
carried out by Paul Fitts’, it was decided to include
force feedback in the research described in this paper
to represent the physical conditions of the real
assembly task.
Figure 5: Virtual Reality System Architecture.
The virtual parts are created in Solidworks
TM
CAD system, then exported to the VR software using
file format conversion process (Figure 6). The virtual
assembly environment incorporates virtual
representations of the components used in the
experiments and the table on which the parts are
located. The start and end positions are marked on the
top surface of the table by two spots (Figure 8). In
order to create physical behavior of the manipulated
objects Open Dynamic Engine (ODE) was used. This
physical engine has its proper collision detection
system, which handles convex and non-convex
shapes of objects.
Figure 6: Polygonal mesh of 3D models of two parts used
in the experiments.
3 METHOD AND EXPERIMENT
DESIGN
Industrial engineers have consistently advocated that
small-amplitude movements are used whenever
possible in assembly work, on the ground that the
time required to complete a unit of work increases as
a function of its amplitude as well as a function of the
precision demanded by the task. In the experiments
carried out by Paul Fitts, the manipulated objects
were a pointed stylus, pins and washers, these objects
SIMULATION
FORCE
COMPUTATION
Feedbacks :
- Forces
- Positions
Informations :
- Positions
- Speed
Haptic
Device
Modelling Movement Time for Haptic-enabled Virtual Assembly
57
were considered weightless in the study of movement
time he carried out.
Most of the assembly tasks involve grasping,
moving and positioning parts in a fixed locating
position. However, mechanical parts could have
different geometric shapes and finite dimensions that
might affect the operator performance in the assembly
task execution. This study focuses on the
manipulation of cylindrical parts and investigates the
potential of applying Fitts’ law to obtain a model that
represents the time required to move a mechanical
part during the assembly operation. By analogy with
the experiments carried out by Paul Fitts (Fitts, 1954),
the VE represented in the Figure 7 was used to run 3
experiments for which different combinations of the
diameter of the manipulated part, the movement
distance and the hole diameter of the mating part were
used. The operator picks the primary part (the
manipulated part) with the VIRTUOSE™ haptic
device, then he/she moves the part towards the
secondary part (the receiving part) and finally he/she
drops it to the desired position and orientation. Then,
the primary part is moved back at the start position
and the task is repeated 10 times. Each subject had to
execute the task ten times for each combination of the
diameter of the manipulated part, the movement
distance and the diameter of the hole of the receiving
part. After the completion of the experiments, a
second session with the same task execution and
conditions took place after 3 days. An algorithm was
developed to automatically record the task
completion time (MT), the locating position and the
orientation of the part for further analysis.
3.1 Experiment 1: Moving a
Cylindrical Part with Insertion
Task
The subjects were asked to move a cylindrical part
having 5 cm of diameter (the primary part) from a
starting position to a target cylindrical part (called the
secondary part). The subject inserts the primary part
into the hole of the secondary part and then returns it
over the starting position, repetitively, for 10 cycles
(Figure 7 and Figure 8). The secondary part is a
cylindrical container for which the hole’s diameter
(W) is 8 or 16 cm, located at a distance (A) equal to
30, 60, or 90 cm from the starting position. The
combination of the two target diameters (W) and
three center-to-center movement amplitudes (A)
resulted in five possible indices of task difficulty (ID)
of 1,90; 2,90; 3,49; 3,90; and 4,49.
By considering the different values of the target
width and amplitude of movement, six combinations
representing the different experimental conditions
were obtained.
Figure 7: Task execution in experiment 1.
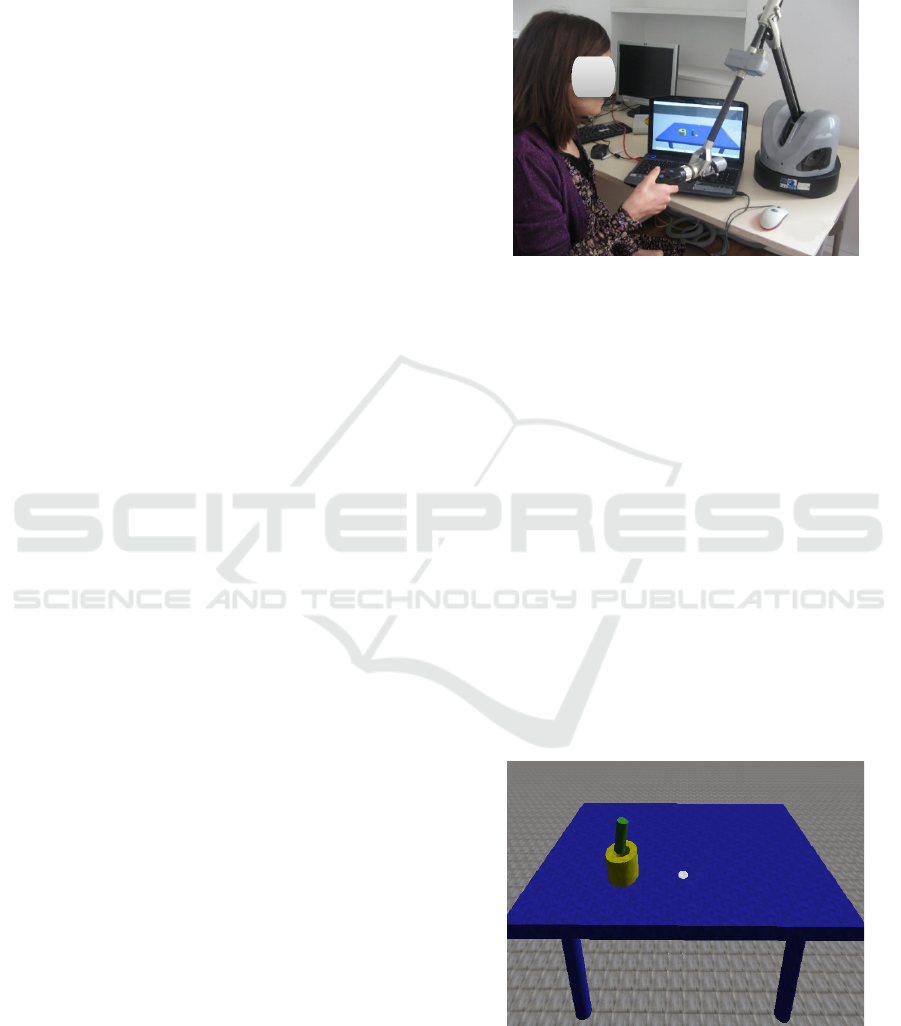
Ten subjects from the university community (1
female, 9 males) aged from 20 to 40 years old and all
right-handed. They were seated on the chair in front
of the computer screen and manipulates the virtual
part with the VIRTUOSE™ haptic device. For
ergonomic considerations, a calibration between the
VE and the 3D interaction device was made so that
the handle of the VIRTUOSE™ is manipulated at the
users’ elbow height. In order to be familiarized with
the haptic device and 3D interaction technique each
subject had to practice the assembly operation during
a training session of 15 minutes for which the user
performance was not recorded. A repeated-measures
design counter-balanced by conditions was carried
out. This included three experimental conditions
presented to the subjects in a random order.
During the execution of the virtual task, subjects
were instructed to work as accurately and rapidly as
possible.
Figure 8: The virtual environment used for the experiment
1.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
58
3.1.1 Data Analysis and Results
In order to perform the analysis of data collected from
the experiment the means of movement time for each
experimental condition was computed (Table 1).
The analysis of the data represented in the Table
1 showed that for each category of target diameter
(W), the movement time (MT) increased
progressively as movement amplitude (A) increased.
It is also important to notice that for each amplitude,
the movement time increased progressively as the
target diameter was decreased. These trends were
observed in the original Fitts’ experiments of the
reciprocal taping with the pointed stylus (Fitts, 1954).
The index of performance can be considered constant
(1,4 – 1,59) for the index of difficulty ranging from
2,9 to 4,49 but falls to 1,06 for ID = 1.9. In order to
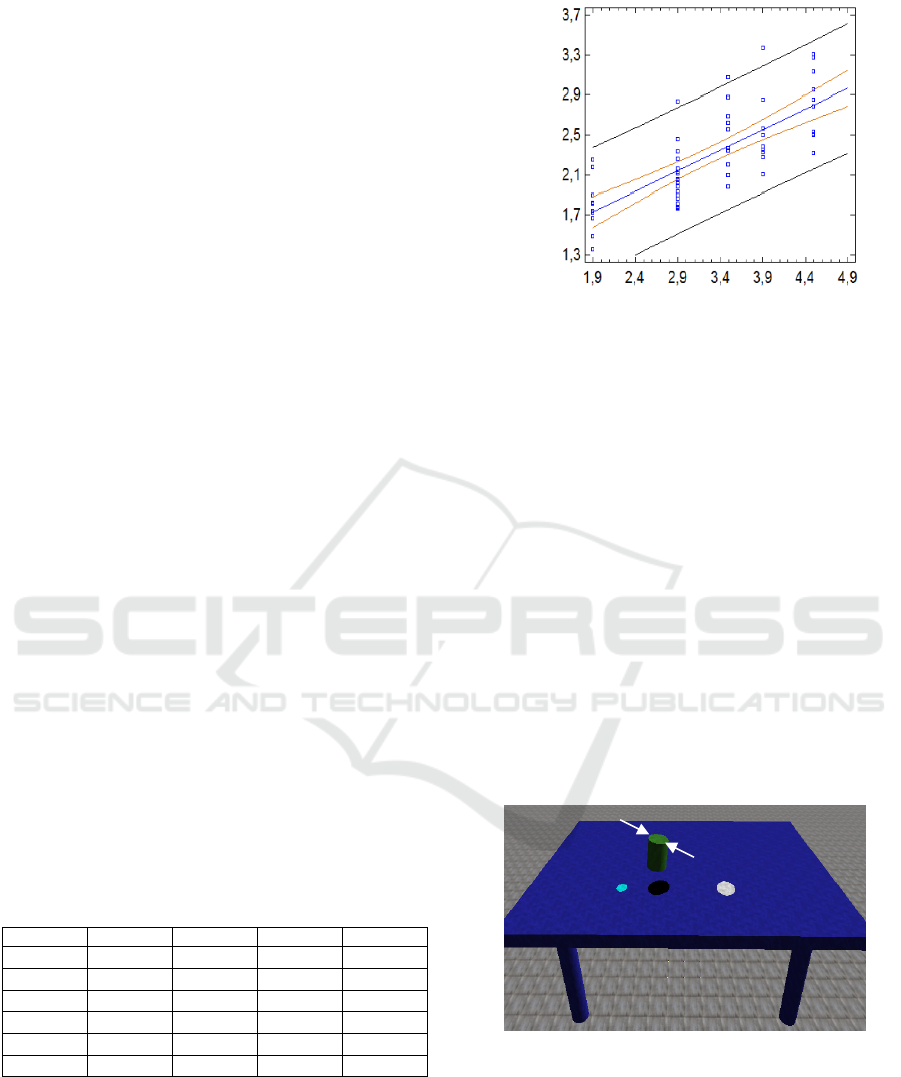
confirm that Fitts’s law can be applied in the
assembly of cylindrical parts, a linear regression
analysis was performed on the assembly time and the
task index of difficulty for the data obtained for each
subject who participated in this experiment. The
result showed the linear relationship between MT and
ID as follows:
MT = a + b ID
With a correlation coefficient r = 0,742, this
confirms the existence of a statistically significant
correlation between the variables MT and ID of the
studied model. The linear regression analysis of MT
on ID yielded the following estimated model:
= 0,94 + 0,411
The curve of the fitted model for the studied data
is presented in Figure 9.
Table 1: Mean movement time and index of performance
obtained in the experiment.
W (cm) A (cm) ID MT (sec) IP
8 30 2,90 2,049 1,41
8 60 3,90 2,530 1,54
8 90 4,49 2,815 1,59
16 30 1,90 1,796 1,06
16 60 2,90 2,070 1,40
16 90 3,49 2,481 1,40
Figure 9: Curve of the fitted model of the experiment 1.
3.2 Experiment 2: Locating a Part with
Finite Width in a Position without
Locating Tolerance
The subjects were asked to carry out a similar task,
but without inserting the primary part into the
secondary part. Rather, target acquisition required
subjects to perform a reciprocal taping at the start
position marked by a white spot and at the final
position, represented by a disk of 5 cm of diameter
and 5 mm of thickness, located on the table (Figure
10). However, in all combinations, the diameter of the
white spot, located at the start position, is equal to the
diameter of the moved part. The taping should be
carried out so that the axis of symmetry of the moved
part, the center of symmetry of the white spot at the
start position and the center of the disk at the final
position are superimposed.
Figure 10: The virtual environment used for the experiment
2.
The task is repeated 10 times continuously without
releasing the primary part. The subjects were
requested to execute the task as accurately and
quickly as possible. The movement amplitudes were
20, 30, and 50 cm. In addition to the variation of the
movement amplitude, the diameter of the primary
ID
MT
D
Modelling Movement Time for Haptic-enabled Virtual Assembly
59
part was also varied across experimental conditions
(5, 7, and 9 cm). Of interest was whether the diameter
of the moved part contributed towards the overall task
difficulty as documented by (Boothroyd, Geoffrey.
Dewhurst, Peter. Knight, 1994).
3.2.1 Data Analysis and Results
This experiment aims at evaluating human
performance, in terms of the time required to move a
cylindrical part between two distant positions, during
the execution of a manual assembly task in VE. The
objective is to investigate whether Fitts’ law applies
when the locating tolerance (equivalent to the target
width in the original Fitts’ law experiment) is not
allowed. The different combinations between the
means of movement time MT, primary part diameters
(D) and movement amplitudes (A) for the two
sessions of the experiment 2 are presented in Table 2.
Table 2: Mean movement time and index of performance
obtained from the experiment 2.
W (cm) D (cm) A (cm) ID MT (sec) IP
5 5 20 3 1,310 2,29
5 5 30 3,58 1,552 2,30
5 5 50 4,32 1,787 2,41
5 7 20 3 1,276 2,35
5 7 30 3,58 1,420 2,52
5 7 50 4,32 1,694 2,55
5 9 20 3 1,261 2,37
5 9 30 3,58 1,420 2,52
5 9 50 4,32 1,736 2,48
It is noticed from the data of the Table 2 that for a
fixed target diameter (W=5 cm), the movement time
increased when the movement amplitude (A) was
increased. Moreover, the index of performance is
relatively constant (2,3– 2,5) for the index of
difficulty ranging from 3 to 4,32. These results
correspond to those obtained in the experiment 1. In
order to ascertain the relationship between the
movement amplitude and the movement time and to
investigate if the diameter of the moved part affects
the movement time, Two-way ANOVA analysis was
carried out using the movement time recorded for
each combination. The movement time is the
dependant variable and the factors for this test are: the
diameter (D) of the moved part and the movement
amplitude (A).
Since the P-values of these factors are less than 0,05,
this confirms that the movement amplitude and the
diameter of the moved part have a statistically
significant effect on the movement time (MT) at the
95% confidence level (Table 3).
Table 3: Results of the analysis of variance for the
movement time MT.
Source
Sum of
Squares
Df Mean
Square
F-Ratio P-Value
Main
Effects
D
0,0135 2 0,0067 7,31 0,046
A
0,317 2 0,158 171,45 0,0001
Residual
0,0036 4 0,0009
Total
0,334 8
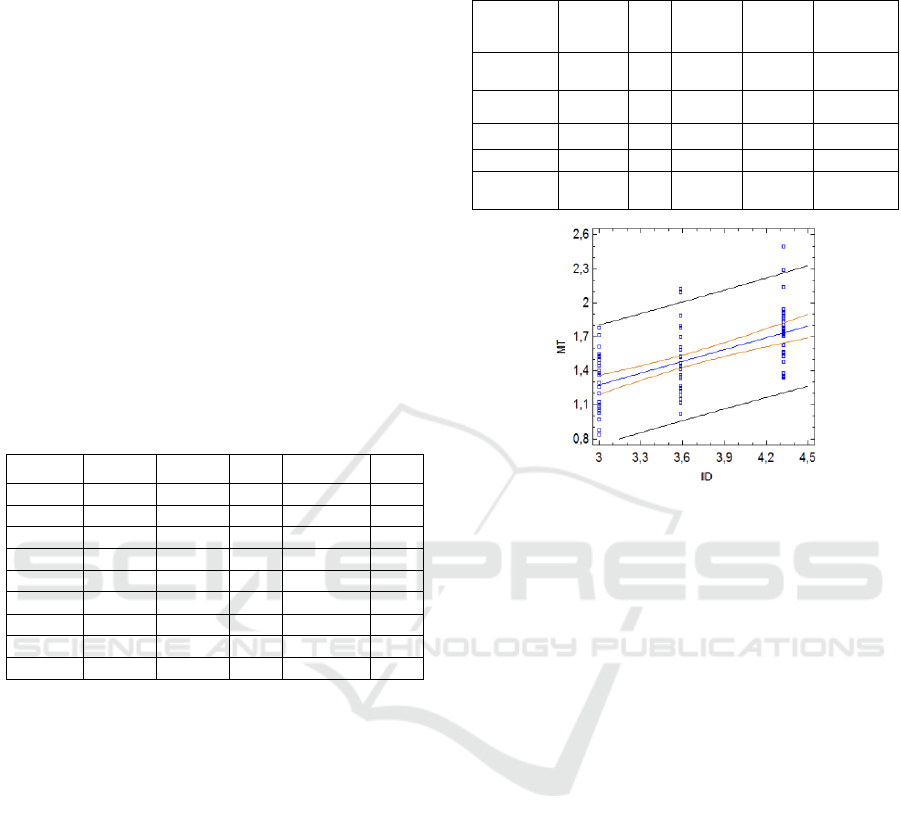
Figure 11: The Curve of the fitted model for the experiment
2.
The result of the regression analysis yielded a
correlation coefficient r = 0,972. The equation of the
fitted model is:
= 0,2 + 0,347
The curve of the fitted model for the experiment 2 is
presented in the figure 11.
3.3 Experiment 3: Assembly Task with
Different Values of the Diameter of
Primary Part (D), Movement
Amplitude (a), and the Diameter of
the Secondary Part (W)
The subjects were asked to perform a similar task but
with the condition where the diameter of the hole of
the secondary part (named target width W) was
varied: 4 and 9 cm as was the movement amplitude
(A): 30 and 60 cm and the diameter of the primary
part (D): 5, 7 and 14 cm. The combination of targets
widths and movement amplitudes resulted in the
following values of the task index of difficulty: 3, 32;
3, 9; 4, 32; and 4, 9 (Figure 12).
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
60
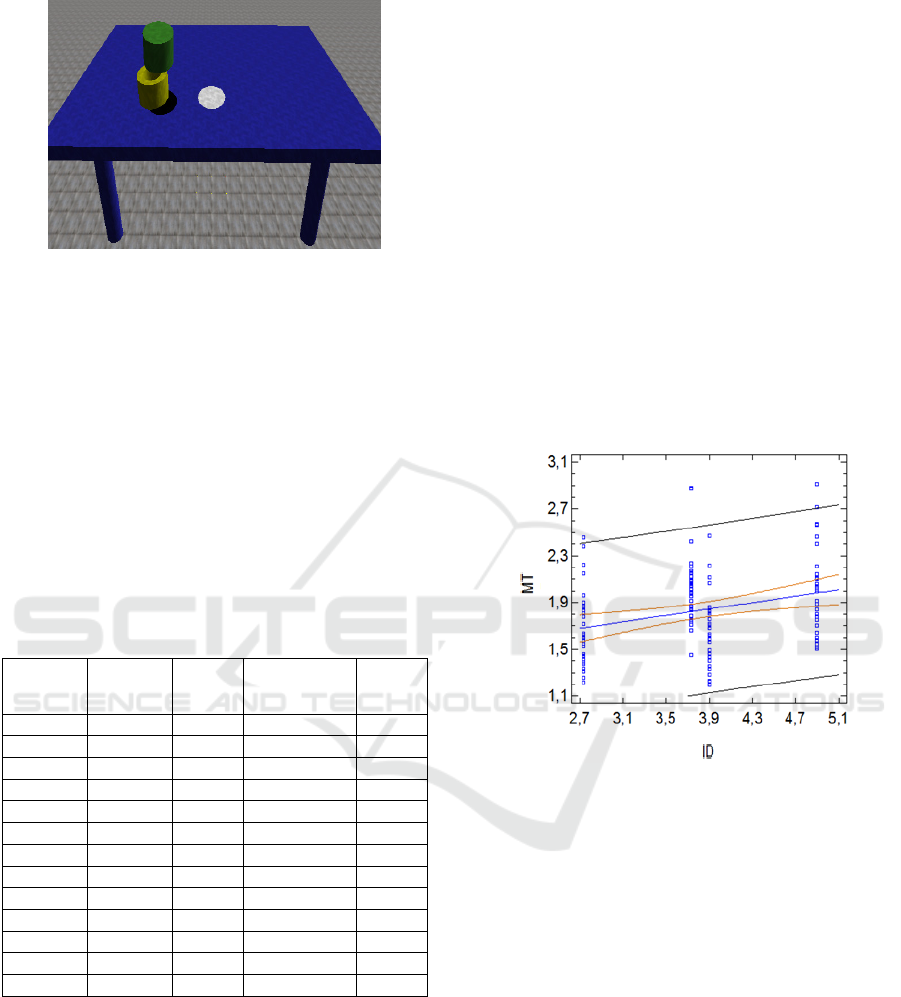
Figure 12: Virtual environment for the experiment 3.
3.3.1 Data Analysis and Results
The means movement times (MT) calculated for the
combined trials of the experiment 3 are presented in
Table 4.
The index of performance (IP) can be considered
relatively constant within two intervals ([1.65 – 1.8]
and [2.3 – 2.5]) for the index of difficulty ranging
from 2.73 to 3.73 and 3.9 to 4.9, respectively.
Furthermore, the relationships among the data do not
correspond closely to those found in the two previous
experimental conditions.
Table 4: Mean movement time and index of performance
obtained in the experiment 3.
In fact, for each category of target width (W) the
movement times increased progressively as the
amplitude (A) was increased, however, for each
category of amplitude (A) the movement time did
note change significantly when the tolerance (W) was
decreased, this result did not match with the trends
found in the original experiments carried out by Paul
Fitts.
The correlation test of MT with ID gives a
correlation coefficient r = 0, 286. This confirms the
existence of statistically significant relationship
between MT and ID. The equation of the fitted model
represented in the figure 13 is the following:
= 1,3 + 0,138
The result of this experiment showed that Fitts’
law model can be adopted to estimate the movement
time, in the case where the diameter of the primary
part (D) is greater than the diameter of the secondary
part (W). In practice, this case of manipulation occurs
in assembly without inserting the primary part in the
hole of the secondary part. However, further
investigations are necessary to determine why in the
conditions of experiment 3 (when the tolerance (W)
was decreased) the movement time did not follow the
trend of the original Fitts’ law. It is also important to
quantify the effect of the diameter of the moved part
in the formulation of the equation of the movement
time.
Figure 13: Curve of the fitted model for the experiment 3.
4 DISCUSSION
The experiments reported in this paper examined the
use of Fitts’s Law as a tool for evaluating cylindrical
parts assembly tasks in virtual environment. While
Fitts’ Law generally held under the three virtual
assembly conditions, further investigations are
necessary to explain why decreasing the target width
(W) in the experimental condition 3 did not increase
the movement time. In order to represent real world
interaction, the virtual assembly environment
designed in this research provided haptic sensation to
the user. However, in order to confirm the validity of
Fitts’s law for the assembly of cylindrical parts, it is
necessary to conduct the same experiments in real
world and compare the trends obtained in virtual and
in real world conditions. It is also important to
W (cm) A (cm) ID
MT
(seconds)
IP
4 30 3,90 1,651 2,36
4 60 4,90 1,953 2,51
4 30 3,90 1,601 2,43
4 60 4,90 1,941 2,52
4 30 3,90 1,644 2,37
4 60 4,90 2,107 2,32
9 30 2,73 1,657 1,65
9 60 3,73 2,067 1,80
9 30 2,73 1,618 1,69
9 60 3,73 2,073 1,80
9 30 2,73 1,728 1,58
9 60 3,73 1,953 1,91
Modelling Movement Time for Haptic-enabled Virtual Assembly
61

explore and qualify the effect of the diameter of the
manipulated part on movement time.
5 CONCLUSION AND
RESEARCH PERSPECTIVES
The research reported in this paper showed an
analogy between the results obtained in the original
Fitts’ law experiments and the task of moving
cylindrical parts in virtual assembly environment
including haptic feedback. The rate of movement
time recorded in three experiments increased
uniformly as movement amplitude was increased for
each category of target width, and increased
uniformly as tolerance was decreased for a category
of movement amplitude except for the experiment 3.
The index of performance is constant over a wide
range of the task index of difficulty. This confirms the
hypothesis of Fitts’s law stating that movement time
varies with task difficulty in such a way that the index
of performance is constant over a wide range of
movement amplitude and tolerances. However, the
results obtained in the experiment 3 require further
investigations in order to evaluate the effect of the
diameter of the moved part on movement time. This
could lead to a new formulation of Fitts’ law as a
model of the movement time in assembly task. It is
also worth noting that in order to ascertain the
statistical significance of the results, it is planned to
run the experiments with involving bigger number of
subjects.
REFERENCES
Boothroyd, Geoffrey. Dewhurst, Peter. Knight, W. A.
(1994). Product Design for Manufacture and Assembly.
Marcel Dekker, Inc.
Cha, Y., & Myung, R. (2013). Extended Fitts’ law for 3D
pointing tasks using 3D target arrangements.
International Journal of Industrial Ergonomics, 43(4),
350–355.
https://doi.org/10.1016/J.ERGON.2013.05.005
Chryssolouris, G., Mavrikios, D., Fragos, D., &
Karabatsou, V. (2000). A virtual reality-based
experimentation environment for the verification of
human-related factors in assembly processes. Robotics
and Computer-Integrated Manufacturing, 16(4), 267–
276. https://doi.org/https://doi.org/10.1016/S0736-
5845(00)00013-2
Cochran, W. G., & Cox, G. M. (1950). Experimental
designs, 2nd ed. In Experimental designs, 2nd ed.
Oxford, England: Wiley.
Deng, C.-L., Geng, P., Hu, Y.-F., & Kuai, S.-G. (2019).
Beyond Fitts’s Law: A Three-Phase Model Predicts
Movement Time to Position an Object in an Immersive
3D Virtual Environment. Human Factors, 61(6), 879–
894. https://doi.org/10.1177/0018720819831517
Dewar, R. G., Carpenter, I. D., Ritchie, J. M., & Simmons,
J. E. L. (1997). Assembly planning in a virtual
environment. Innovation in Technology Management.
The Key to Global Leadership. PICMET ’97, 664–667.
https://doi.org/10.1109/PICMET.1997.653557
Fitts, P. M. (1954). The information capacity of the human
motor system in controlling the amplitude of
movement. Journal of Experimental Psychology, Vol.
47, pp. 381–391. https://doi.org/10.1037/h0055392
Fitts, P. M., & Peterson, J. R. (1964). Information capacity
of discrete motor responses. Journal of Experimental
Psychology, 67(2), 103–112.
https://doi.org/10.1037/h0045689
Fitts, P. M., & Radford, B. K. (1966). Information capacity
of discrete motor responses under different cognitive
sets. Journal of Experimental Psychology, Vol. 71, pp.
475–482. https://doi.org/10.1037/h0022970
Gallegos-Nieto, E., Medellín-Castillo, H. I., González-
Badillo, G., Lim, T., & Ritchie, J. (2017). The analysis
and evaluation of the influence of haptic-enabled virtual
assembly training on real assembly performance.
International Journal of Advanced Manufacturing
Technology, 89(1–4), 581–598.
https://doi.org/10.1007/s00170-016-9120-4
Gonzalez-Badillo, G., Medellin-Castillo, H., Lim, T.,
Ritchie, J., & Garbaya, S. (2014). The development of
a physics and constraint-based haptic virtual assembly
system. Assembly Automation, 34(1), 41–55.
https://doi.org/10.1108/AA-03-2013-023
Gupta, R., Whitney, D., & Zeltzer, D. (1997). Prototyping
and Design for Assembly analysis using Multimodal
virtual environments.
CAD Computer Aided Design.
https://doi.org/10.1016/S0010-4485(96)00093-0
Hand, C. (1997). A Survey of 3D Interaction Techniques.
Comput. Graph. Forum, 16(5), 269–281.
https://doi.org/10.1111/1467-8659.00194
Kerr, B. A., & Langolf, G. D. (1977). Speed of Aiming
Movements. Quarterly Journal of Experimental
Psychology, 29(3), 475–481.
https://doi.org/10.1080/14640747708400623
Langolf, G. D., Chaffin, D. B., & Foulke, J. A. (1976). An
investigation of fitts’ law using a wide range of
movement amplitudes. Journal of Motor Behavior,
8(2), 113–128.
https://doi.org/10.1080/00222895.1976.10735061
Lin, C. J., Caesaron, D., & Woldegiorgis, B. H. (2019). The
Effects of Augmented Reality Interaction Techniques
on Egocentric Distance Estimation Accuracy. Applied
Sciences, 9(21), 4652.
https://doi.org/10.3390/app9214652
Liu, L., & Liere, R. van. (2011). Modeling object pursuit
for 3D interactive tasks in virtual reality. 2011 IEEE
Virtual Reality Conference, 3–10.
https://doi.org/10.1109/VR.2011.5759416
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
62

Lubos, P., Bruder, G., & Steinicke, F. (2015). Influence of
Comfort on 3D Selection Task Performance in
Immersive Desktop Setups. Journal of Virtual Reality
and Broadcasting, 12(2015)(2).
https://doi.org/10.20385/1860-2037/12.2015.2
Nevins, J. L., & Whitney, D. E. (1980). Assembly research.
Automatica, 16(6), 595–613.
https://doi.org/10.1016/0005-1098(80)90003-5
Raghu Prasad, M. S., Purswani, S., & Manivannan, M.
(2013). Modeling of Human Hand Force Based Tasks
Using Fitts’s Law BT - ICoRD’13 (A. Chakrabarti &
R. V Prakash, Eds.). India: Springer India.
Sagardia, M., & Hulin, T. (2017). Multimodal Evaluation
of the Differences between Real and Virtual
Assemblies. IEEE Transactions on Haptics, 1–12.
https://doi.org/10.1109/TOH.2017.2741488
Sallnäs, E.-L., & Zhai, S. (2003). Collaboration Meets
Fitts’ Law: Passing Virtual Objects with and without
Haptic Force Feedback. BT - Human-Computer
Interaction INTERACT ’03: IFIP TC13 International
Conference on Human-Computer Interaction, 1st-5th
September 2003, Zurich, Switzerland. Zurich,
Switzerland.
Schwind, V., Leusmann, J., & Henze, N. (2019).
Understanding Visual-Haptic Integration of Avatar
Hands Using a Fitts’ Law Task in Virtual Reality.
Proceedings of Mensch Und Computer 2019, 211–222.
https://doi.org/10.1145/3340764.3340769
Sturges, R. H., & Kilani, M. I. (1992). Towards an
integrated design for an assembly evaluation and
reasoning system. Computer-Aided Design, 24(2), 67–
79. https://doi.org/https://doi.org/10.1016/0010-
4485(92)90001-Q
Wang, Q. H., Huang, Z. D., Li, J. R., & Liu, J. W. (2017).
A force rendering model for virtual assembly of
mechanical parts with clearance fits. Assembly
Automation. https://doi.org/10.1108/AA-12-2016-175
Santochi, M., and Dini, G., 1992. Computer-aided planning
of assembly operations: the selection of assembly
sequences. Robotics & Computer-Integrated
Manufacturing, 9 (6), pp. 439-446.
Modelling Movement Time for Haptic-enabled Virtual Assembly
63
