
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
Philipp Fleck
1
, Fernando Reyes-Aviles
1
, Christian Pirchheim
1
,
Clemens Arth
1,2
and Dieter Schmalstieg
1
1
ICG, Graz University of Technology, Inffeldgasse 16/2, 8010 Graz, Austria
2
AR4 GmbH, Strauchergasse 13, 8020 Graz, Austria
Keywords:
Remote Collaboration, Telepresence, Augmented Reality.
Abstract:
In this paper, we present the maintenance assistance user interface (MAUI), a novel approach for providing
tele-assistance to a worker charged with maintenance of a cyber-physical system. Such a system comprises
both physical and digital interfaces, making it challenging for a worker to understand the required steps and
to assess work progress. A remote expert can access the digital interfaces and provide the worker with timely
information and advice in an augmented reality display. The remote expert has full control over the user
interface of the worker in a manner comparable to remote desktop systems. The worker needs to perform
all physical operations and retrieve physical information, such as reading physical labels or meters. Thus,
worker and remote expert collaborate not only via shared audio, video or pointing, but also share control of
the digital interface presented in the augmented reality space. We report results on two studies: The first study
evaluates the benefits of our system against a condition with the same cyber-physical interface, but without
tele-assistance. Results indicate significant benefits concerning speed, cognitive load and subjective comfort
of the worker. The second study explores how interface designers use our system, leading to initial design
guidelines for tele-presence interfaces like ours.
1 INTRODUCTION
Technical facilities increasingly incorporate cyber-
physical systems, which must be operated and main-
tained using a mixture of physical and digital inter-
faces. This evolution is not limited to industrial set-
tings: For example, many components of a mod-
ern car can no longer be repaired with physical tools
without access to diagnostic devices that access the
car’s software-controlled sensors and actuators. In
industrial environments, workers must learn to oper-
ate a mixture of conventional physical controls, such
as levers or buttons, and digital interfaces, such as
touch panels placed next to machines or desktop com-
puter interfaces in a control station. For maintenance
and repair, workers must access sensor telemetry data
through diagnostic interfaces, while cross-referencing
the telemetry with sources on paper. Mastering this
multitude of information sources can be difficult. For
cases where the local worker’s competence is ex-
ceeded, equipment manufacturers operate call-centers
or send experts to customers at high traveling costs.
Consequently, tele-assistance has been proposed
as a relief for workers and experts. Most tele-
assistance solutions establish a shared presence of re-
mote expert and worker via some form of audio/video
link combined with tele-pointing and on-screen anno-
tation. One approach is to combine tele-presence with
augmented reality (AR) by letting the worker wear
a head-mounted display (HMD) with built-in camera
and microphone. The worker has their hands free and
does not have to switch attention to a stationary screen
in order to access digital data. The remote expert can
see what the worker sees, provide spoken instructions,
and point out relevant areas in the shared video.
These collaborations primarily target supporting
the mutual spatial understanding of worker and ex-
pert. They are sufficient in situations where only
physical interfaces or facilities need to be manipu-
lated. However, in a cyber-physical system, digi-
tal interfaces must be manipulated as well, requiring
shared understanding of non-spatial aspects. Collab-
oration in digital space is common practice for of-
fice workers, who combine video conferencing with
screen sharing and remote desktop interfaces. The ex-
pert will commonly operate the office worker’s desk-
top computer remotely. In such a tele-assistance situ-
ation, the physical interface (e.g., , feeding paper into
800
Fleck, P., Reyes-Aviles, F., Pirchheim, C., Arth, C. and Schmalstieg, D.
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems.
DOI: 10.5220/0009093708000812
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
800-812
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Facility for production. (left) An expert in the control center dispatching (right) a worker on the shop floor, wearing
a HoloLens, to fix machine downtime problems.
a printer) must be operated by the worker, while the
digital interface is subject to mixed initiative (both
users take turns at operating the mouse). Oftentimes
the digital interface will almost exclusively be oper-
ated by the expert, in particular, if the worker lacks
technical understanding.
In this work, we combine AR tele-assistance with
shared operations via a remote desktop-like user inter-
face into a framework called maintenance assistance
user interface (MAUI). Our system is able to display
web-based interfaces as overlays in the HMD. These
digital interfaces can contain any mixture of teleme-
try information, instructions and interactive widgets
used to control the digital aspects of a cyber-physical
system. Since the worker is busy with the physical
tasks, may lack experience with the digital interface,
or is simply overwhelmed by the amount of informa-
tion displayed in the relatively small field of view of
the HMD, the primary responsibility for configuring
and operating the digital interface is deferred to the
remote expert. The expert helps the worker to inter-
act with the virtual and real world at the same time,
thus reducing the risk of possible failures or mistakes.
MAUI was designed with the intention of more effi-
cient subdivision of work between expert and worker,
providing the following contributions:
• We analyze the requirements of AR tele-
assistance for industrial jobs, where remote op-
eration and configuration of a user interface by a
remote expert is required.
• We present implementation details of MAUI,
which address the aforementioned requirements
with its robust abilities for sharing audio, video,
digital content and control state in harsh industrial
environments.
• We discuss results of a user study demonstrating
lower task completion times, reduced cognitive
load, and better subjective comfort on performing
a maintenance task.
• We discuss the results of an exploratory study,
orthogonal to the first one, analyzing how web
developers perform when creating user interface
content in the MAUI framework.
2 RELATED WORK
AR can help a worker by purely displaying digi-
tal information. Henderson et al. (Henderson and
Feiner, 2011) have shown the benefits of AR in the
maintenance and repair domain. However, such pre-
configured information sources are often unavailable.
In this case, a good alternative is to link the worker to
a remote expert providing live support. Dealing with
a cyber-physical system adds the dimension of a dig-
ital interface, which can be controlled locally by the
worker, or alternatively by the remote expert. Thus,
our work is at the nexus of remote collaboration, inter-
action with cyber-physical systems and remote desk-
top user interfaces. We provide background to each
of these topics in the remainder of this section.
2.1 Remote Collaboration
Video transmission has been the enabling technol-
ogy for tele-assistance, since the pioneering work of
Kruger (Krueger et al., 1985). Early work in this
space (Barakonyi et al., 2004; Wellner and Freemann,
1993) was mostly constrained to desktop computers,
due to technical limitations. Recent progress in mo-
bile and wearable computing has brought video con-
ferences abilities to the factory floor.
However, establishing a shared spatial presence
at the task location still proves challenging. Experts
need to visually experience the worker’s environment.
The video stream from a camera worn by the worker
will only show what the worker is seeing (Huang and
Alem, 2013; Bauer et al., 1999; Kim et al., 2013;
Chastine et al., 2008; Kurata et al., 2004). Giving the
remote expert independent control of a robotic cam-
era (Kuzuoka et al., 2000; Gurevich et al., 2012) is
usually not economically feasible.
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
801

Apart from spoken instructions, most tele-
assistance solutions let the expert provide visual-
spatial references, either via hand gestures (Oda
et al., 2013; Huang and Alem, 2013; Kirk and Stan-
ton Fraser, 2006), remote pointing (Bauer et al.,
1999; Fussell et al., 2004; Kim et al., 2013; Chas-
tine et al., 2008), or hand-drawn annotation on the
video (Fussell et al., 2004; Gurevich et al., 2012;
Chen et al., 2013; Kim et al., 2013; Ou et al., 2003).
Hand-drawing is either restricted to images from a
stationary camera viewpoint (Kim et al., 2013; Gure-
vich et al., 2012; Huang and Alem, 2013; Bauer et al.,
1999; Chen et al., 2013; Fussell et al., 2004; Kirk and
Stanton Fraser, 2006; Kurata et al., 2004) or requires
real-time 3D reconstruction and tracking (Chastine
et al., 2008; Lee and Hollerer, 2006; Gauglitz et al.,
2014b; Gauglitz et al., 2014a).
2.2 Cyber-physical System Interaction
None of the remote collaboration systems mentioned
in the last section takes into account the special re-
quirements of a task that must be performed on a
cyber-physical system. The dual nature of a cyber-
physical system implies that each task will commonly
consist of a physical task (e.g., physical part mounted
with screws) and a virtual task (e.g., re-initializing a
device after repair). It is crucial for the worker to re-
ceive support on both aspects of cyber-physical tasks.
Recent work in interaction design is starting to
consider such interactions with cyber-physical sys-
tems. Rambach et al. (Rambach et al., 2017) pro-
pose that every cyber-physical system serves its own
data (e.g., sensor information, control interface) to
enable new ways of interaction. Alce et al. (Alce
et al., 2017) experimentally verify different methods
of device interaction while increasing the number of
devices. A common design are device-specific con-
trols embedded in the AR user interface (Feiner et al.,
1993; Ens et al., 2014).
Other recent work investigates AR in production
and manufacturing industries. Kollatsch et al. (Kol-
latsch et al., 2017) show how to control an industrial
press simulator within an AR application by leverag-
ing its numerical interface, i.e., a device interface al-
lowing to run simulations which are partially executed
on the machine. Han et al. (Han et al., 2017) concen-
trate on automated situation detection and task gener-
ation to give better and more responsive instructions,
e.g., for fixing paper jams in printers.
Cognitive conditions during task performance are
a key element to success in many industrial situations.
Maintenance workers must frequently perform mul-
tiple repair tasks during one shift, requiring a high
level of flexibility and concentration. Therefore, re-
cent research has considered how reducing factors
like frustration, stress and mental load can improve
overall performance. For instance, Baumeister et
al. (Baumeister et al., 2017) investigate mental work-
load when using an AR HMD. Funk et al. (Funk
et al., 2016; Funk et al., 2017) compare instructions
delivered via HMD to tablet computers and plain pa-
per. Recently, Tzimas et al. (Tzimas et al., 2018) re-
ported findings on creating setup instructions in smart
factories.
2.3 Remote Desktop User Interfaces
Remote desktop tools, such as Skype
1
or
TeamViewer
2
, combine video conferencing with
remote operation. In theory, these tools have the
features required for worker-expert collaboration
and can be made to run on AR headsets such as the
HoloLens. However, a closer inspection reveals that
the similarities to the desired solution are shallow.
Desktop user interfaces are operated using mouse
and keyboard. They do not work very well when
one user has reduced resources (e.g., when using a
phone with a small screen) or when network connec-
tivity is unstable. Workers do not want to retrieve
files and navigate them manually, while they are
tending to a task. Moreover, shared spatial presence
between worker and expert is not considered at all
in desktop tools. Even re-using parts of desktop tool
implementation in an AR applications turns out to be
hard because of the differences between desktop and
mobile operating systems.
Perhaps closest to our approach in this respect
is the work of O’Neill et al. (O’Neill et al., 2011)
and Roulland et al. (Roulland et al., 2011). Like
us, they present a concept for remote assistance, fo-
cused on office printer maintenance. However, un-
like ours, their work relies on schematic 3D rendering
of a printer device, delivered on the printer’s built-in
screen, and very few details are provided on the im-
plementation and extensibility of the system. In con-
trast, MAUI is a comprehensive tele-assistance frame-
work. We describe details about its implementation,
and evaluate the system’s development and use.
3 DESIGN GOALS
In this section, we discuss insights from discussions
with an industrial collaborator and give an overview
1
Skype: https://www.skype.com
2
TeamViewer: https://www.teamviewer.com
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
802
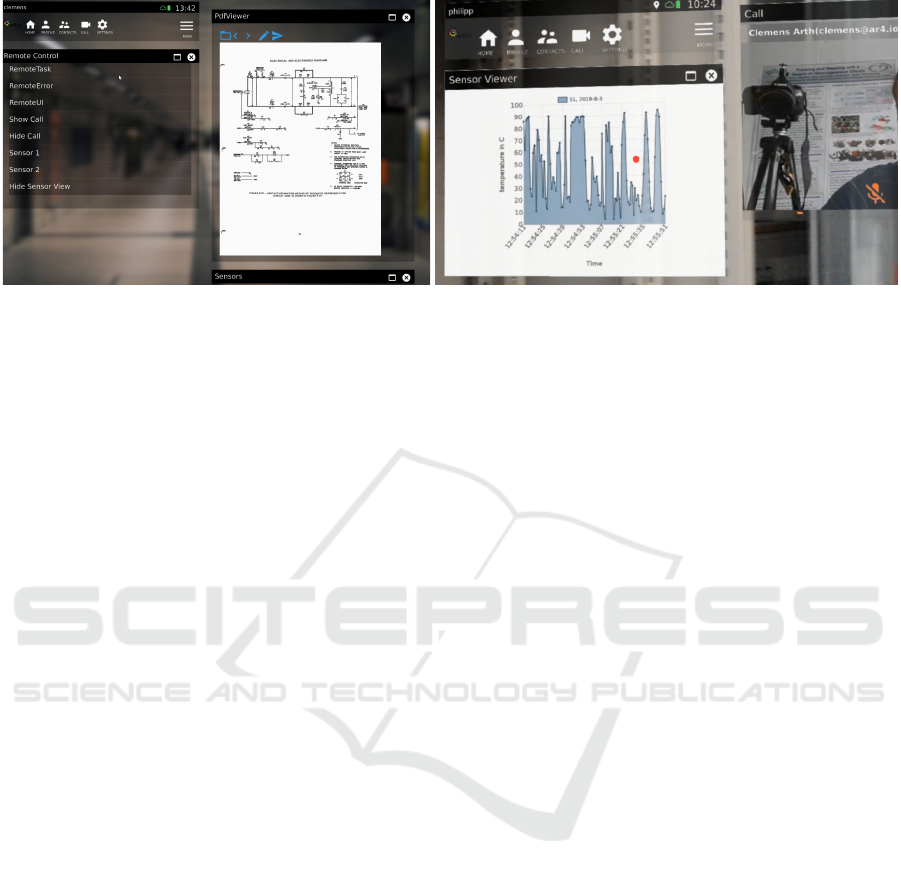
Figure 2: Example of a remote maintenance demo application. (left) Expert interface with an open document and shortcuts of
remote commands, (right) worker UI within a call (A/V, data, commands) and live view of telemetry data shown as a graph.
of our system design, including the user interface
components.
Our industrial collaborator operates manufactur-
ing facilities for mass-produced goods using large-
scale machines. Workers have to change parts, fix
jams and adjust machinery. Most of the tasks involve
cyber-physical systems; e.g., in an adjustment task,
the worker needs to adjust a physical valve and then
restore a setting on a digital interface.
In the maintenance procedures we considered, we
found significant motivation for using AR and tele-
assistance. In most cases, live readings of machine
telemetry are not accessible at the task location. A
common situation is that a second person has to keep
an eye on a physical display or analog gauges, while
the worker is performing a repair. Providing real-
time readings within a HMD drastically improves the
workflow. Furthermore, step-by-step instructions in-
crease the confidence of the worker and create a clear
reference frame for the expert.
One recurring statement in the discussions was
that the pace of technology development is too high,
and workers tend to be overwhelmed, when new fea-
tures – in particular, digital ones – are introduced too
quickly. The workers have a wide range in terms of
age and come from a diverse educational background.
Not surprisingly, young ”digital natives” seem to have
an easier time adjusting to cyber-physical interfaces
than seasoned workers close to retirement. To cater
to all these user groups in a flexible way, we adopted
a strategy of introducing levels of expertise into the
digital interfaces, supporting the progressive disclo-
sure of new interface features as workers are learning.
Interaction techniques found in the standard user
interface design of a device such as the HoloLens,
e.g., , a gaze-contingent cursor and a handheld Blue-
tooth ”clicker” device, are not easily accepted by the
workers. Our objective was to provide a very gentle
learning curve, so we limited our initial design ex-
plorations to presenting 2D windows in the HMD in
a style comparable to desktop interface, without any
use of 3D geometry. Often, a detailed illustration is
all it takes an experienced worker to solve a problem,
so rather straight-forward features can provide good
value and serve as motivating examples for workers
asked to adopt the new technology.
We also heard from workers who already felt suf-
ficiently comfortable with the AR system that regis-
tration of a CAD model with the real machine in 3D
could help them in locating sensors or other compo-
nents more quickly. However, we did not explore any
use of 3D registration in the work presented in this
paper.
In contrast to the workers, experts are gener-
ally well-trained specialists, such as construction en-
gineers. They often have extensive knowledge in
CAD models creation and a good understanding of
cyber-physical systems. Therefore, the expert can
be entrusted with more detailed control of the tele-
assistance system. The tele-presence system should
also give the expert the ability to judge the worker’s
abilities and decide on an appropriate course of ac-
tion.
The tele-assistance system described in this pa-
per was designed to provide remote expert support to
workers directly on the production floor. Using a see-
through HMD keeps the worker’s hands free, so all
visual elements must be embedded in the HMD view,
and the need for explicit interaction must be reduced
compared to a typical desktop interface in order to not
distract the worker from the physical task.
Consequently, we formulated concrete require-
ments concerning telepresence, multimedia and re-
mote control features, to address the requirements of
potential applications. Worker features include:
• Initiating audio/video connections with easy con-
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
803

nection management (phonebook, user discov-
ery).
• A 3D mesh transfer function enables the worker to
send a scanned 3D model of the current environ-
ment to the expert, including the worker’s current
position (Leveraging device capabilities e.g., ac-
cessing the HoloLens mesh, but also allowing to
plugin other 3D-reconstruction systems).
Expert features include:
• A screen capture module allows the expert
to share screenshots of running applications
(e.g., CAD model viewer showing a cross section
of a broken machinery part) with the worker.
• Multimedia content in a representation-agnostic
form (PDF, HTML, images, links) can be trans-
ferred and displayed.
• Multi-page documents, such as PDF files, af-
ford synchronized navigation between expert and
worker. Content can be enriched with shared an-
notations.
• The expert must be able to control the worker’s
UI, including web content, but also triggering na-
tive interfaces of the cyber-physical system.
The last feature, remote control, implies that a cus-
tom user interface must be dynamically embedded in
the tele-assistance application, alleviating the worker
from switching apps or configuring the user experi-
ence. The ability to change the user interface without
touching the underlying application makes it also easy
to embed tutorial functions into the user interface it-
self, which can be step-by-step enabled, facilitating a
gentle learning curve for the worker. Once the worker
is sufficiently familiar with the user interface, more
features can be enabled, e.g., transitioning from 2D to
3D visualizations or enabling additional controls for
physical devices.
Finally, the industrial partners in this research
project also required to use established software tech-
nologies. We chose a web-centric approach, inspired
by Argon (MacIntyre et al., 2011), which leverages
existing developer skills and allows for run-time ex-
tensibility.
4 IMPLEMENTATION
MAUI uses Unity3D and runs on the Microsoft
HoloLens (for the worker) and Windows 10 (for the
expert). A native audio/video component component
enables real-time recording, playback, encoding and
decoding of audio/video streams. Audio/video sup-
port can produce a high system load in particular on
Peer Peer
Real-time priority
Normal priority
Communication
library
Platform
specific AV
native
App
Device
Commands
UI
Commands
JavaScript interpreter
Framework
Content
Commands
HTML/JS
/CSS definitions
Figure 3: The application software stack of MAUI with sev-
eral native and interpreted software layers.
mobile platforms, so using hardware accelerated au-
dio/video features on each target system was essen-
tial. Therefore, we bypass the regular communication
structure of Unity3D in favor of calling device drivers
on the target platform directly.
The communication component builds on a modi-
fied version of the RakNet
3
library for the lower lev-
els of the network stack. We chose RakNet over
alternatives provided in .NET, since it is relatively
lightweight and enables unrestricted cross-platform
support. To ensure high performance, these features
use a native, multi-threaded implementation with
static memory allocation. Furthermore, we can grad-
ually control data-flow-rates and change the video
and audio compression accordingly to adapt for any
network-bandwidth.
We rely on the ability of Unity3D to load and reg-
ister third-party libraries as components to support
platform-specific features as well as dynamic user
interfaces. Asynchronous coordination is enabled
through event passing between components. Native
libraries are developed in C++, but can be scripted
using C# and Javascript.
The resulting framework has only minimal func-
tionality to call native device functions, while all ap-
plication code and user interface code is loaded dy-
namically. Such code is written in C#, Javascript
and HTML and therefore interpreted at runtime. This
allows arbitrary code changes at runtime, useful for
continuous delivery and, in particular, for remote con-
trol.
In the remainder of this section, we describe de-
tails of the individual system components, as shown
in Figure 3.
3
https://github.com/facebookarchive/RakNet
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
804

Figure 4: The worker’s view within the HoloLens: (leftmost image) An error is reported, (right images) repair instructions are
shown to the workers.
4.1 User Interface Component
MAUI uses a custom HTML engine with JavaScript
interpreter
4
to create user interfaces in HTML5, CSS
and JavaScript. User interfaces are rendered into tex-
ture maps and displayed on arbitrary polygonal sur-
faces inside the Unity3D view. Using web technolo-
gies lets a designer easily create responsive user inter-
faces and application layouts.
Even though, technically, the JavaScript engine is
just a plug-in to the Unity3D game engine, JavaScript
is promoted to the central facility for UI development.
However, both worlds are not separated: An impor-
tant property of the web-centric user interfaces is its
native integration into the Unity3D scene. Both the
document object model of the web content and regu-
lar game objects in Unity3D are exposed to Javascript.
Thus, 2D web content and 3D game objects can inter-
act. Apart from handling 2D and 3D events inside the
Unity3D process, JavaScript can also handle external
events. Such external events can be generated by web
services (e.g., REST) or cyber-physical systems.
4.2 Remote User Interface
Orchestration
The interpreted nature of MAUI facilitates remote or-
chestration of the user interface experienced by the
worker. All data transmitted between communicating
nodes in MAUI is either an audio/video stream or a
message in a JSON envelope. The JavaScript inter-
preter unwraps the envelope and interprets the mes-
sage. Since the message can contain JavaScript code,
MAUI does not have to enforce a distinction of data
and code. This implies that messages are directly ex-
ecutable. For instance, instead of just sending an im-
age, we can pack the image into a command to create
a new window on the recipient side and display the
sent image. Therefore, the recipient system does not
require an implementation of such functionality. If
the shipped command is given a unique name, it can
be stored as data and later invoked by that name to
extend the set of user interface features. Direct exe-
cution of messages allows the expert to quite literally
4
https://powerui.kulestar.com/
control the worker’s user interface. The expert can
invoke every function that that the worker could in-
voke, both inside Unity3D and outside (i.e., address-
ing the cyber-physical system). Note that this remote
control operates on the level of framework activities
and not on the level of user interface events: The ex-
pert does not have to remotely ”click a button” in the
worker’s user interface, but can invoke functions di-
rectly by name, or install new functions to extend the
command set.
UI Commands: let the expert manipulate the user in-
terface. This includes remotely opening, closing and
re-arranging windows, or modifying the user interface
widgets to assume an arbitrary state.
Device Commands: wrap native functions on the peer
device, such as activating a flashlight or a sensor in
a (non-extensible) JavaScript library. Configuration
options of the peer device, such as location or WiFi
SSID, can be queried dynamically to make the UI
adaptive and context-sensitive. For example, the ex-
pert may query the device for the current location, and
retrieve instructions for the facilities at the given lo-
cation from a building information system.
Content Commands: are used to transfer multime-
dia data (PDF, HTML, images, links etc.) in a
representation-agnostic binary form. Within an in-
dustrial scenario one would transmit part documen-
tations, repair guides, images of broken parts or CAD
drawings. Annotations and multi-page synchroniza-
tion are also supported.
5 EXAMPLE SCENARIO
In this section, we describe a repair process in order
to illustrate a possible workflow between worker and
expert, as could happen in MAUI.
The worker faces an issue with a personal com-
puter, which fails to boot. Therefore, the worker calls
the expert by selecting the expert’s id in the phone-
book.
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
805

Figure 5: (left) User study equipment: faulty device (electronics box with light-bulb, with device id label on top, HoloLens
and Bluetooth keyboard), (center) Power cord with labeled outlets Labeled outlets, (right) The worker wearing the HoloLens
has completed the task, and the light-bulb turns green.
An audio-video call is established. The expert
sees the worker’s outfacing camera view, while the
worker sees a live image of the expert. After identify-
ing the malfunctioning PC, the expert is able to obtain
a diagnostic message from the PC over the network:
”the fan stalled”. The expert raises the error to the
worker by selecting the corresponding command in
the remote commands menu. The remote command
is shipped to the worker and displayed.
The worker is unfamiliar with this error and asks
for help and further guidance. The expert replaces
the error message with step-by-step-instructions, de-
picted in Figure 4.
While going through the steps the worker requires
more detailed instructions. The expert decides to take
a screenshot of the worker’s view and annotate the
important areas where the fan-mounts are placed. By
pressing the Send button, the annotation is send and
displayed in the workers view.
6 USER STUDY
In the following, we describe a user study designed
to evaluate how well our system can support a worker
in a task of repairing a cyber-physical system. The
results of the study are given in subsection 6.4.
6.1 Conditions
We compared two conditions. In both conditions, the
worker experienced the same user interface as part
of a HoloLens application, but the availability of the
expert varied: In the first condition, self-navigation
(SN), no expert was available. In the second con-
dition, expert help (EH) through the MAUI software
was available.
Self Navigation. In the SN scenario, the worker
controls and navigates the user interface alone. All
decisions need to be made without external support,
requiring to draw on one’s own knowledge and expe-
rience. SN allows the worker to have the full control
over the user interface with all its features, but the
user does not have the ability to add new elements or
exchange the UI with a different one. For instance,
a new control window for an additional device can-
not be added. Only the window layout can be altered
before starting the procedure.
Expert Help. In the EH scenario, the worker can
ask for expert help, and the expert can take care of
the user interface. After establishing the connection,
the expert begins supporting the worker via the fea-
tures offered by MAUI. Meta-information about the
worker’s system (e.g., OS-version, device-type, local
environment, etc.) is conveyed to the expert, guiding
the experts in providing support. During UI opera-
tion, the expert decides which content or windows are
shown or hidden, so that the worker can better focus
on the task at hand. This relieves the worker from
having to go through potentially deeply nested and
complex menu hierarchies to retrieve required infor-
mation.
We were especially interested in the preparation
time before the worker starts executing a particular
task. This time encompasses the effort needed to
get all necessary instructions and instruments ready
to successfully perform the task. Based on prelimi-
nary testing, we hypothesized that EH would cause
less mental workload, have a lower time to start (i.e.,
a reduced time between receiving instructions and the
first step being carried out), and create higher comfort
for the worker.
6.2 Task Description
We designed our evaluation to investigate mental
workload and effort, while performing a machine
maintenance task. A module to control networked
home appliances was added to our base system. A
smart light-bulb (Philips Hue) was introduced as the
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
806

target device (Figure 5). Timing data as well as other
relevant statistical data inside the application was
captured with a user-study component added to our
framework. Finally, we created two distinct worker
apps, the SN app and the EH app.
The task itself consisted of a combination of phys-
ical and virtual procedures. The physical procedures
included unplugging and re-plugging a power cord,
pressing power buttons and typing on a physical key-
board. The virtual procedures included interactions
with the UI, reading of instruction reading and trig-
gering functions on the light-bulb.
The task had the following structure divided in
five steps within a step-by-step instruction list:
1. The faulty device lights up red.
2. In both conditions, the worker has to open the in-
structions within the UI (a list with nine step-by-
step instructions) for the task.
3. The worker has to open the ”light-bulb” widget
to control the smart light-bulb. In SN, the worker
must do this by searching through the menu. In
EH, the list is opened by the remote expert.
4. While following the instruction, the worker has to
perform a sequence of switching off power, un-
plugging, re-plugging, and switching power on
again. Power outlets are labeled by id, and the
instructions refer to particular outlet id for the re-
plugging step.
5. The worker has to press the start button in the
device-interface widget. The task finishes when
the device lights up green.
6.3 Experimental Procedure
We used a within-subjects design, where the condi-
tions were SN and EH. To balance the tasks, we al-
ternated the order of conditions between participants,
and we alternated the plug position on the power-
chord. Each participant had to perform a training
task first, followed by either of the two methods. The
training task consisted of a subset of the main UI, but
widgets had different names and the training task in-
volved only the smart light-bulb, and not the power
cord. Between each task, a NASA TLX (Hart and
Staveland, 1988) questionnaire was administered.
Participants completed a pre- and a post-study
questionnaire to gather basic personal information,
experience with AR, preferred method, and subjective
difficulty. Before starting the user study, participant
were asked to put on the HoloLens and adjust it to
comfort. They were explained that they were workers
and had to complete a maintenance task. The study
began with the app starting and the faulty device light-
ing up red.
The setup is depicted in Figure 5, showing the
faulty device (light-bulb in box, with a non-working,
unconnected and disabled power-supply on top) with
the id on it, the labeled outlets and the HoloLens with
the Bluetooth keyboard. Furthermore, a participant
is shown successful completion the task with remote
expert support, as indicated by the smart light-bulb
lighting up in green.
The expert role was played by one of the authors,
since we were primarily interested in the performance
of the workers. Using a volunteer as expert would re-
quire training the volunteer to become an expert first.
Interaction of volunteer expert and volunteer worker
would then depend on the training success, which we
wanted to rule out as a confounding factor.
The expert acted in a passive way, letting the par-
ticipant decide how much help was needed. In all
cases, the expert asked for the faulty device id to per-
form the search on behalf of the worker, and then
opened the light-bulb widget for the worker. The ex-
pert also pointed out to carefully read through the in-
structions and to ask for help if needed.
6.4 Results
We tested 32 participants (4f), aged 21-40 (avg 28.9,
median 28.5). The age distribution does not directly
match the current age distributions of workers in such
industries (Workforce Age Distribution, ∼10 years
higher), but is a good representation for the next and
further waves of workers. Half of the participants had
never used a HoloLens before, and all of the partic-
ipants had used step-by-step instructions before. All
participants use a computer on a regular basis; 12.5%
of the participants had never repaired, build or assem-
bled a computer before. All participants felt that the
training was enough to get familiar with the user in-
terface.
A one-way repeated measures ANOVA found
main effects on NASA TLX score supporting our
hypothesis (p < 0.05, F
1,62
, = 4.55) that the EH in-
teraction method causes less mental workload while
performing a task. Figure 6 shows the NASA TLX
score distribution side-by-side with the time-to-start
timings distribution. In both cases, EH has lower
scores, which supports our hypothesis. By compar-
ing the scores of each category with one-way re-
peated measures ANOVA, we found main effects
on mental demand (p < 0.05, F
1,62
, = 4.61), effort
(p < 0.05, F
1,62
, = 4.61) and frustration ((p < 0.05,
F
1,62
, = 4.61)), favoring EH over SN. No significant
effects were found on physical demand, temporal de-
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
807
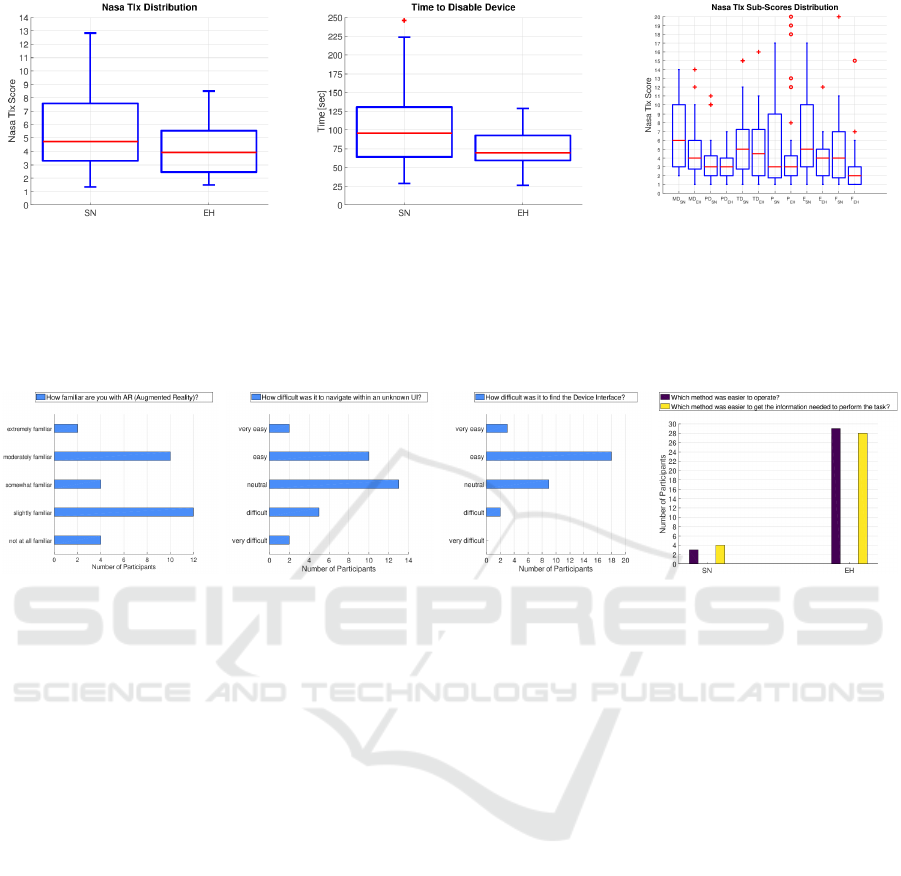
Figure 6: (left) Boxplot of NASA TLX scores SN vs EH, where EH reached lower scores with a p-value < 0.05 (F
1,62
, = 4.55)
showing a significance towards less mental workload. (center) Boxplot of Timings until the device got disabled. Timing SN vs
EH, where EH reached shorter time with a p-value < 0.05 (F
1,44
= 5.84) showing a significance towards EH needing less to
disable the device. (right) Scores for NASA TLX categories. From left to right: (MD) mental demand; (PD) physical demand;
(TD) temporal demand; (P) performance; (E) effort, (F) frustration. We found main effects on MD (p < 0.05, F
1,62
, = 4.61),
P (p < 0.05, F
1,62
, = 4.61) and F (p < 0.05, F
1,62
, = 4.61) preferring EH over SN, but no effects on categories related to the
sitting position of the task (PD), the high completion rate (P), and short time it took to perform the task (TD).
Figure 7: left-to-right; (i) Most of the participants were between moderately and slightly familiar with AR. (ii) The ease of
navigation within the UI was mainly easy to neutral. (iii) It was also easy for the participants to find the device-interface. (iv)
Around 90% of the participants preferred the EH interaction method over SN and also found it easier to operate.
mand and performance. Reasons might be that phys-
ical demand is low in our scenario involving a seated
position and lightweight objects. Since the overall
task duration was short, temporal demand was low
overall. Concerning performance, we observed high
completion rates, which are later discussed in this sec-
tion. Figure 6 shows the NASA TLX category scores
and their pairwise distribution starting with mental
demand (MD) in alternating order SN, EH.
We measured time-to-start as the time until the
worker disabled the lightbulb. In case of SN, we
started measuring the time when the worker per-
formed the first action, until the worker pressed the
disable device button. In case of EH, we started mea-
suring when the participant sees the expert (to avoid
hardware related delays from camera and microphone
initialization).
Note how the tasks differed depending on the con-
dition: In SN, the participant had to perform actions
like reading through menu entries to open the right
task, clicking, opening the lightbulb widget and en-
tering the device id into the search box. In EH, the
worker had to talk to the expert and read the device
id aloud. Afterwards, the expert would raise the light-
bulb widget in the worker’s display.
Figure 6 shows overall shorter timings of EH. A
one-way repeated measures ANOVA shows main ef-
fects on the time measurements, supporting our hy-
pothesis (p < 0.05, F
1,62
, = 4.55) that EH is faster
with high significance. In real-life maintenance and
repair scenarios, conditions might deteriorate while
performing a task. Therefore, it can be very impor-
tant to start acting swiftly.
In SN, 25% of the participants made an error,
while, in EH, only 15% made an error. Overall, 8/32
missed the first step, either in SN or EH. This gives us
85% task completion rate for EH and 75% task com-
pletion rate for SN.
Questionnaire Results. After the experiment, we
asked each participant which method was easier to
operate. An overwhelming 90.6% preferred EH over
SN. In response to the question which method was
easier to get the information needed to perform the
task, 87.5% preferred EH over SN. Figure 7 (d) sum-
marizes these numbers. Some of the participants pre-
ferred SN over EH, which seems to be related to a
possible low trust placed in the expert. We consider
this a problem that must be addressed in the human
resources structure of a company.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
808

Additionally participants had to answer questions
on a Likert scale concerning UI navigation. Most par-
ticipants found it easy to navigate the UI and find spe-
cific widgets such as the one for the lightbulb. Inter-
estingly, some participants who answered that it was
easy to find the lightbulb widget actually had troubles
finding it. One comment was oh, it is written right
there, i just have to read, implying that the partici-
pant did not read the window title. These contradict-
ing observations happened only in the SN condition
and show that at least some of the participants did not
spend full attention on the task. If a lack of concen-
tration is a common cause of problems, the cost of
expert support could be better justified.
The familiarity with AR across all participants
is bi-modal, split up between slightly familiar and
moderately familiar. Figure 7 shows the correspond-
ing Likert questions. Few participants answered they
were somewhat familiar with AR. We did not note
any specific correlation of AR experience and perfor-
mance.
User Feedback. The perceived behavior of the par-
ticipants while performing the tasks was very homo-
geneous. Half of the participants had never used a
HoloLens before. Users generally liked our UI de-
sign, but did not like the interactions prescribed by the
Microsoft HoloLens SDK, which uses a head-locked
crosshair and clicking via the ”air-tap” gesture. A
more sophisticated hand tracking (Xiao et al., 2018)
may provide a good alternative.
Some users mentioned that buttons were too small
and too closely spaced. We found that this criticism
is strongly correlated with one’s experience in using
the HoloLens. Our informal observation is that small
widgets are usable for seated users, but standing or
moving users require larger widgets. Given the lim-
ited display real estate of the HoloLens, this implies
the need for a radically uncluttered user interface. In
MAUI, the expert can take care of this requirement.
7 DEVELOPER STUDY
In addition to the previous study concentrating on
how the worker perceives the expert instructions, we
were also interested to assess the characteristics of
MAUI as a development platform. How easy or hard
is it to create user interfaces in MAUI? Easy develop-
ment would not only allow to quickly integrate new
use cases into MAUI, but would also potentially en-
able an expert to modify the user interface on the fly.
Thus, we performed a qualitative user study
were we asked two developers (A and B) with a
Figure 8: New layout of Developer A. (left) Draft on paper
of the attempted layout. (right) Functional result after 2.5h.
web-development background (knowledge of HTML,
CSS, JavaScript) to create exemplary applications
and user-interfaces based on MAUI. The developers
were instructed to apply workflows and leveraging the
strengths of the provided framework. They were free
to choose what features to implement and how to re-
alize it. Questions were encouraged at any time, and
thinking-aloud was encouraged. Each developer par-
ticipated in a workshop-style introduction and imme-
diately afterwards entered a design and implementa-
tion phase, while being accompanied and observed by
one of the authors.
7.1 Procedure
Participants took part in a one-hour face-to-face work-
shop provided as an introduction to the MAUI frame-
work. After the introduction, they filled in an in-
troductory questionnaire and started the design and
implementation phase (up to three hours). One au-
thor accompanied the developer and answered API
questions, since we do not have extensive written
documentation at this point. To conclude, a second
questionnaire was administered, followed by an semi-
structured interview. Finally a NASA-TLX assess-
ment was done.
7.2 Developers and Results
In this section we give details about our two partici-
pants, A and B, and discuss their experiences. A is a 36
years old male researcher at Graz University of Tech-
nology. He writes code daily, but uses HTML/CSS/JS
only occasionally. He is slightly familiar with Elec-
tron
5
, AngularJS
6
and other JS frameworks.
The basic idea of A was to improve the layout of
a UI example presented to him, giving the example a
style more akin to contemporary mobile apps. The
re-worked application, depicted in Figure 8, shows
the new layout, which offers more screen-space com-
pared to the original one. Since A has a strong C++
5
Electron: https://electronjs.org/
6
AngularJs: https://angularjs.org
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
809

Figure 9: Sample App Developer B. The improved version
with the close button on the left and the toggle and maximize
controls on the right in the top view. The original version
with the controls grouped together in the bottom view.
background, he was less skilled with the design proce-
dure, but highly productive with the provided frame-
work. Two bugs were found and immediately fixed.
Most of the time was spent on getting the layout to
work appropriate. As he said, the provided functions
are very useful and helped with the implementation.
A felt neutral about how easy it was to create the
experience and that the presented way was slightly
different to the traditional ways of implementing web
content. Furthermore, he felt that it was easy to use
the given material. This developer also mentioned
that, with more time and more thoughts on the design,
better results where easily possible. He was happy
with the capabilities and how easily it was to integrate
web content with the existing Unity 3D application.
B is a 28 years old male researcher at Graz Uni-
versity of Technology. He writes code daily and often
uses HTML/CSS/JS. Furthermore, he is moderately
familiar with Electron and somewhat familiar with
AngularJS and similar frameworks. This developer
has a lot of experience with jQuery
7
.
Right after going through the provided examples,
B immediately pointed out usabilty issues. He made
small, but impactful layout changes. Having the
window-control buttons toggle, maximize and close
next to each other encourages mistakes to happen.
Pressing button in close proximity is easy for desktop
users with a mouse, whereas in AR (on the HoloLens)
selection is more brittle, especially if a mistake closes
the window (see Figure 9). Code changes were done
to the Javascript and JSON templates and therefore
integrated seamlessly with the application.
Another usability problem was identified within
the PC repair instructions sample. Having the con-
trols below the content always leads to an extended
head movement in AR. Placing the controls next to
the content allows for easier navigation without dis-
7
jQueryhttps://jquery.com/
Figure 10: Changes made by developer B to the PC repair
task. The green controls of the original version (left) moved
next to the center image (right) increasing usability, espe-
cially in AR.
traction (see Figure 10).
It was easy for B to modify and improve selected
samples. The developer stated that MAUI did not
diff much from conventional web development. Over-
all, both developers created presentable and work-
ing results, one tackling the display real estate and
one fixing usability problems relevant for AR pre-
sentation. Within the short period of time, the de-
velopers were able to utilize the framework and per-
formed meaningful changes to selected samples. B
mentioned to not forget to check the implementation
within Unity3D-Application, to avoid incompatibility
with unsupported features e.g., css display: flex.
Nasa TLX shows nothing unexpected. The men-
tal demand was higher than normal for A, because
of his limited use of web technologies. Both devel-
opers reported normal to good performance in self-
assessment, possibly being more critical than an av-
erage evaluator would. Frustration and effort where
near ”high” for A, whereas, for B, it was near ”low”.
7.3 Discussion
The developer study shows that developers with basic
web knowledge can perform meaningful changes to
existing applications and, given enough time, could
rather easily create whole applications themselves.
Within the industrial context, this aspect turns out to
be of key value. Today, an AR developer is expected
to have special knowledge, such as Unity 3D or C#
to write an application for a commercial AR device,
such as the HoloLens. Lowering the entry gap by re-
moving the requirement to have profound knowledge
in 3D and C++ out allows to tap into a larger pool of
possible developers, as also observed by MacIntyre et
al. (MacIntyre et al., 2011).
In a near future, where AR is commonly used, web
content can be generated easily, or it can be generated
automatially by web service portals to cyber-physical
systems and the internet of things.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
810

8 CONCLUSION
We have presented MAUI, a collaborative platform
that lets a worker wearing an AR headset call a re-
mote expert to help with operating a cyber-physical
system. MAUI combines spatial AR tele-presence
through shared audio/video with shared control of a
web-based user interface displayed in the AR headset.
The expert can take full control over the UI, relieving
the worker of handling the digital interface and let-
ting the worker concentrate on the physical interface
instead.
We performed a quantitative user study in order
to compare both interaction methods in terms of time
and comfort benefits. The results show that expert
help was overwhelmingly preferred by participants
over working alone. Our user study results show that
support from an expert can reduce cognitive load and
increase performance. In particular, the time until the
first physical action can be performed is decreased,
allowing a quick response in critical real-world sce-
narios (Huang et al., 2013; Huang and Alem, 2011).
Furthermore, two developers touching the pre-
sented work for the first time were able to come up
with meaningful results in a short time-frame of up to
three hours. One improved the layout of the applica-
tion towards more screen-estate and one improved the
usability especially in AR (HMD).
A future study could also compare pure au-
dio/video help with remote UI help, but this study
would involve more complicated aspects. A study
comparing different feature sets of remote help for
AR would also include whether the remote expert
can observe all relevant physical activities around the
expert, if the expert can control IoT objects in the
worker’s environment, and so on.
In the future, we plan to extend our tests to real
workers in a production environment and improve the
aesthetics of the user interface to fit modern design
standards
8
. Long-term evaluations will show the ef-
fectiveness on educating workers on problem solv-
ing. We plan to improve the widget placement system
over the standard solution
9
to reliably avoid situations
where the UI blocks the worker’s view of the physical
objects. Moreover, we plan a user interface manage-
ment system for delivering tailored user interfaces to
workers based on a formal task description.
8
Design Principles
9
Microsoft Mixed Reality Toolkit: Tag-along
ACKNOWLEDGEMENTS
The authors wish to thank Denis Kalkofen. This work
was supported by FFG grant 859208.
REFERENCES
Alce, G., Roszko, M., Edlund, H., Olsson, S., Svedberg,
J., and Wallerg
˚
ard, M. (2017). [poster] ar as a user
interface for the internet of things - comparing three
interaction models. In ISMAR-adj., pages 81–86.
Barakonyi, I., Fahmy, T., and Schmalstieg, D. (2004). Re-
mote collaboration using augmented reality videocon-
ferencing. In Proc. of Graphics Interface (GI), pages
89–96. Canadian Human-Computer Comm. Society.
Bauer, M., Kortuem, G., and Segall, Z. (1999). ”where are
you pointing at?” a study of remote collab. in a wear-
able videoconf. system. In ISWC, pages 151–158.
Baumeister, J., Ssin, S. Y., ElSayed, N. A. M., Dorrian, J.,
Webb, D. P., Walsh, J. A., Simon, T. M., Irlitti, A.,
Smith, R. T., Kohler, M., and Thomas, B. H. (2017).
Cognitive cost of using augmented reality displays.
TVCG, 23(11):2378–2388.
Chastine, J. W., Nagel, K., Zhu, Y., and Hudachek-Buswell,
M. (2008). Studies on the effectiveness of virtual
pointers in collaborative augmented reality. 3DUI,
pages 117–124.
Chen, S., Chen, M., Kunz, A., Yantac¸, A. E., Bergmark, M.,
Sundin, A., and Fjeld, M. (2013). Semarbeta: mobile
sketch-gesture-video remote support for car drivers. In
Augmented Human International Conference (AH).
Ens, B., Hincapi
´
e-Ramos, J. D., and Irani, P. (2014). Ethe-
real planes: A design framework for 2d information
spaces in 3d mixed reality environm. In SUI. ACM.
Feiner, S., MacIntyre, B., Haupt, M., and Solomon, E.
(1993). Windows on the world: 2d windows for 3d
augmented reality. In UIST, pages 145–155. ACM.
Funk, M., B
¨
achler, A., B
¨
achler, L., Kosch, T., Heidenreich,
T., and Schmidt, A. (2017). Working with ar?: A long-
term analysis of in-situ instructions at the assembly
workplace. In PETRA, pages 222–229. ACM.
Funk, M., Kosch, T., and Schmidt, A. (2016). Interactive
worker assistance: Comparing the effects of in-situ
projection, head-mounted displays, tablet, and paper
instructions. In UBICOMP, pages 934–939. ACM.
Fussell, S. R., Setlock, L. D., Yang, J., Ou, J., Mauer, E.,
and Kramer, A. D. I. (2004). Gestures over video
streams to support remote collaboration on physical
tasks. Hum.-Comput. Interact., 19(3):273–309.
Gauglitz, S., Nuernberger, B., Turk, M., and H
¨
ollerer, T.
(2014a). In touch with the remote world: Remote col-
laboration with augmented reality drawings and vir-
tual navigation. In VRST, pages 197–205. ACM.
Gauglitz, S., Nuernberger, B., Turk, M., and H
¨
ollerer, T.
(2014b). World-stabilized annotations and virtual
scene navigation for remote collaboration. In UIST,
pages 449–459, New York, NY, USA. ACM.
MAUI: Tele-assistance for Maintenance of Cyber-physical Systems
811

Gurevich, P., Lanir, J., Cohen, B., and Stone, R. (2012).
Teleadvisor: A versatile augmented reality tool for re-
mote assistance. In CHI, pages 619–622. ACM.
Han, F., Liu, J., Hoff, W., and Zhang, H. (2017). [poster]
planning-based workflow modeling for ar-enabled au-
tomated task guidance. In ISMAR-adj., pages 58–62.
Hart, S. G. and Staveland, L. E. (1988). Development
of nasa-tlx (task load index): Results of empirical
and theoretical research. Human mental workload,
1(3):139–183.
Henderson, S. and Feiner, S. (2011). Exploring the benefits
of augmented reality documentation for maintenance
and repair. TVCG, 17(10):1355–1368.
Huang, W. and Alem, L. (2011). Supporting hand gestures
in mobile remote collaboration: A usability evalua-
tion. In BCS Conference on Human-Computer Inter-
action (BCS-HCI), pages 211–216.
Huang, W. and Alem, L. (2013). Handsinair: A wearable
system for remote collaboration on physical tasks. In
CSCW, pages 153–156. ACM.
Huang, W., Alem, L., and Tecchia, F. (2013). Handsin3d:
Augmenting the shared 3d visual space with unmedi-
ated hand gestures. In SIGGRAPH Asia 2013 Emerg-
ing Technologies, SA ’13, pages 10:1–10:3. ACM.
Kim, S., Lee, G. A., and Sakata, N. (2013). Comparing
pointing and drawing for remote collaboration. In IS-
MAR, pages 1–6.
Kirk, D. and Stanton Fraser, D. (2006). Comparing re-
mote gesture technologies for supporting collabora-
tive physical tasks. In CHI, pages 1191–1200. ACM.
Kollatsch, C., Schumann, M., Klimant, P., and Lorenz, M.
(2017). [poster] industrial augmented reality: Trans-
ferring a numerical control connected augmented re-
alty system from marketing to maintenance. In
ISMAR-adj., pages 39–41.
Krueger, M. W., Gionfriddo, T., and Hinrichsen, K. (1985).
Videoplace - an artificial reality. In CHI, pages 35–40,
New York, NY, USA. ACM.
Kurata, T., Sakata, N., Kourogi, M., Kuzuoka, H., and
Billinghurst, M. (2004). Remote collaboration using
a shoulder-worn active camera/laser. In ISWC, vol-
ume 1, pages 62–69.
Kuzuoka, H., Oyama, S., Yamazaki, K., Suzuki, K., and
Mitsuishi, M. (2000). Gestureman: A mobile robot
that embodies a remote instructor’s actions. In CSCW,
pages 155–162, New York, NY, USA. ACM.
Lee, T. and Hollerer, T. (2006). Viewpoint stabilization
for live collaborative video augmentations. In ISMAR,
pages 241–242. IEEE Computer Society.
MacIntyre, B., Hill, A., Rouzati, H., Gandy, M., and
Davidson, B. (2011). The argon ar web browser and
standards-based ar application environment. In IS-
MAR, pages 65–74.
Oda, O., Sukan, M., Feiner, S., and Tversky, B. (2013).
Poster: 3d referencing for remote task assistance in
augmented reality. In 3DUI, pages 179–180.
O’Neill, J., Castellani, S., Roulland, F., Hairon, N., Juliano,
C., and Dai, L. (2011). From ethnographic study to
mixed reality: A remote collaborative troubleshooting
system. In CSCW, pages 225–234. ACM.
Ou, J., Fussell, S. R., Chen, X., Setlock, L. D., and Yang,
J. (2003). Gestural communication over video stream:
Supporting multimodal interaction for remote collab-
orative physical tasks. In ICMI, pages 242–249, New
York, NY, USA. ACM.
Rambach, J., Pagani, A., and Stricker, D. (2017). [poster]
augmented things: Enhancing ar applications leverag-
ing the internet of things and universal 3d object track-
ing. In ISMAR-adj., pages 103–108.
Roulland, F., Castellani, S., Valobra, P., Ciriza, V., O’Neill,
J., and Deng, Y. (2011). Mixed reality for supporting
office devices troubleshooting. In VR, pages 175–178.
Tzimas, E., Vosniakos, G.-C., and Matsas, E. (2018). Ma-
chine tool setup instructions in the smart factory using
augmented reality: a system construction perspective.
IJIDeM.
Wellner, P. and Freemann, S. (1993). The Double Digi-
talDesk: Shared editing of paper documents. Techni-
cal Report EPC-93-108, Xerox Research.
Xiao, R., Schwarz, J., Throm, N., Wilson, A. D., and Benko,
H. (2018). Mrtouch: Adding touch input to head-
mounted mixed reality. TVCG, 24(4):1653–1660.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
812
