
Monocular 3D Object Detection via Geometric Reasoning on Keypoints
Ivan Barabanau
1
, Alexey Artemov
1
, Evgeny Burnaev
1
and Vyacheslav Murashkin
2
1
Skolkovo Institute of Science and Technology, Moscow, Russia
2
Yandex.Taxi, Moscow, Russia
Keywords:
Deep Learning, Monocular Vision, 3D Object Detection.
Abstract:
Monocular 3D object detection is well-known to be a challenging vision task due to the loss of depth in-
formation; attempts to recover depth using separate image-only approaches lead to unstable and noisy depth
estimates, harming 3D detections. In this paper, we propose a novel keypoint-based approach for 3D object
detection and localization from a single RGB image. We build our multi-branch model around 2D keypoint
detection in images and complement it with a conceptually simple geometric reasoning method. Our network
performs in an end-to-end manner, simultaneously and interdependently estimating 2D characteristics, such as
2D bounding boxes, keypoints, and orientation, along with full 3D pose in the scene. We fuse the outputs of
distinct branches, applying a reprojection consistency loss during training. The experimental evaluation on the
challenging KITTI dataset benchmark demonstrates that our network achieves state-of-the-art results among
other monocular 3D detectors.
1 INTRODUCTION
The success of autonomous robotics systems, such
as self-driving cars, largely relies on their ability to
operate in complex dynamic environments; as an es-
sential requirement, autonomous systems must reli-
ably identify and localize non-stationary and interact-
ing objects, e.g. vehicles, obstacles, or humans. In its
simplest formulation, localization is understood as an
ability to detect and frame objects of interest in 3D
bounding boxes, providing their 3D locations in the
surrounding space. Crucial to the decision-making
process is the accuracy of depth estimates of the 3D
detections.
Depth estimation could be approached from both
hardware and algorithmic perspectives. On the sen-
sors end, laser scanners such as LiDAR devices have
been extensively used to acquire depth measurements
sufficient for 3D detection in many cases (Yang et al.,
2018; Chen et al., 2017; Lang et al., 2019; Zhou and
Tuzel, 2018; Ku et al., 2018; Yan et al., 2018). How-
ever, point clouds produced by these expensive sen-
sors are sparse, noisy and massively increase mem-
ory footprints with millions of 3D points acquired per
second. In contrast, image-based 3D detection meth-
ods offer savings on CPU and memory consumption,
use cheap onboard cameras, and work with a wealth
of established detection architectures (e.g., (Liu et al.,
2016; Redmon et al., 2016; Ren et al., 2015; Lin et al.,
Figure 1: Geometric reasoning about instance depth (best
viewed in zoom). We use camera intrinsic parameters, pre-
dict 2D keypoints and infer dimensions to “lift” the key-
points to 3D space.
2017a; He et al., 2017; Lin et al., 2017b; Liu et al.,
2018; Simonelli et al., 2019)), yet they require sophis-
ticated algorithms for depth estimation, as raw depth
cannot be accessed anymore.
Recent research on monocular 3D object detection
relies on separate dense depth estimation models (Qin
et al., 2019; Xu and Chen, 2018), but depth recovery
from monocular images is naturally ill-posed, leading
to unstable and noisy estimates. In addidion, in many
practical instances, e.g., with sufficient target resolu-
tion or visibility, dense depth estimation might be re-
dundant in context of 3D detection. Instead, one may
focus on obtaining sparse but salient features, such
as 2D keypoints, that are well-known visual cues of-
ten serving as geometric constrains in various vision
tasks such as human pose estimation (Ramakrishna
652
Barabanau, I., Artemov, A., Burnaev, E. and Murashkin, V.
Monocular 3D Object Detection via Geometric Reasoning on Keypoints.
DOI: 10.5220/0009102506520659
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
652-659
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

et al., 2012; Martinez et al., 2017; Mehta et al., 2017a;
Mehta et al., 2017b) and more general object interpre-
tation (Hejrati and Ramanan, 2012; Wu et al., 2016).
Motivated by this observation, in this paper we
propose a novel keypoint-based approach for 3D ob-
ject detection and localization from a single RGB im-
age. We build our model around 2D keypoint detec-
tion in images and complement it with a conceptually
simple geometric reasoning framework, establishing
correspondences between the detected 2D keypoints
and their 3D counterparts defined on surfaces of 3D
CAD models. The framework operates under the gen-
eral assumptions, assuming the camera intrinsic pa-
rameters are given, and retrieves depth of closest key-
point instance to ”lift” 2D keypoints to 3D space; the
remaining 3D keypoints and the final 3D detection are
assembled in a similar way. To enhance robustness
of our 2D keypoint detection, we use a multi-task re-
projection consistency loss; our model is ultimately
end-to-end trainable. Additionally, our approach does
not require images manually labelled with keypoints,
but instead uses annotations automatically obtained
from back-projecting data-aligned CAD models from
3D space to the image plane; we only mark 14 3D
keypoints per each of 5 3D CAD models, totalling
70 manually labelled 3D keypoints, which makes our
approach particularly labour-efficient in terms of an-
notation costs.
In summary, our contributions are as follows:
• We propose a novel deep learning-based frame-
work for monocular 3D object detection, combin-
ing well-established region-based detectors and a
geometric reasoning step over inferred keypoints.
• We create keypoint annotations for images
in the KITTI 3D object detection benchmark
dataset (Geiger et al., 2012; Geiger et al., 2013),
using a collection of 3D CAD models, annotated
with 3D keypoints. We note that the dataset is
obtained without any human labour. We describe
how to train our framework in an end-to-end fash-
ion using the newly created annotations.
2 RELATED WORK
The most relevant to our work is research on monoc-
ular 3D object detection, that is well-known to be
a challenging vision task. Deep3DBox (Mousavian
et al., 2017) relies on a set of geometric constraints
between 2D and predicted 3D bounding boxes and
reduces 3D object localization problem to a linear
system of equations, fitting 3D box projections into
2D detections. Their approach relies on a separate
linear solver; in contrast, our model is end-to-end
trainable and does not require external optimization.
Mono3D (Chen et al., 2016) extensively samples 14K
3D bounding box proposals per image and evaluates
each, exploiting semantic and image-based features.
In contrast, our approach does not rely on an exhaus-
tive sampling in 3D space, bypassing a significant
computational overhead. OFT-Net (Roddick et al.,
2018) introduces an orthographic feature transform
which maps RGB image features into a birds-eye-
view representation through a 3D scene grid, solv-
ing the perspective projection problem. However,
back-projecting image features onto 3D grid results
in a coarse feature assignment. Our approach de-
tects 2D keypoints with sufficient precision, avoid-
ing any additional discretization. MonoGRNet (Qin
et al., 2019) directly deals with depth estimation from
a single image, training an additional sub-network to
predict the z-coordinate of each 3D bounding box.
(Xu and Chen, 2018) exploit a similar approach, esti-
mating disparity using a stand-alone pre-trained Mon-
oDepth network (Godard et al., 2017). Both these
methods rely on the non-trainable depth estimation
networks, which introduce a computational overhead;
in contrast to (Xu and Chen, 2018) and (Godard
et al., 2017), our approach jointly estimates object 2D
bounding-box and 3D pose in a fully trainable man-
ner, not requiring a dense depth prediction and is sim-
ilar in this respect to (Qin et al., 2019).
Perhaps, the most similar approach to ours
is (Chabot et al., 2017), which utilizes 3D CAD mod-
els, along with predicting 2D keypoints. However,
their network only models 2D geometric properties
and aims at matching the predictions to one of the
CAD shapes, while 3D pose estimation is postponed
for the inference step. They additionally exploit ex-
tensive annotations of keypoints in their 3D models.
In contrast, we only annotate 14 keypoints per each
of the five 3D models and exploit them in a geometric
reasoning module to bridge the gap between 2D and
3D worlds, which allows us to deal with 3D charac-
teristics during training in an end-to-end manner.
3 3D OBJECT DETECTION
FRAMEWORK
Given a single RGB image, our goal is to localize tar-
get objects in the 3D scene. Each target object is de-
fined by its class and 3D bounding box, parameterized
by 3D center coordinates C = (c
x
,c
y
,c
z
) in a camera
coordinate system, global orientation R = (θ, ·, ·), and
dimensions D = (w, h, l), standing for width, height
and length, respectively.
Monocular 3D Object Detection via Geometric Reasoning on Keypoints
653
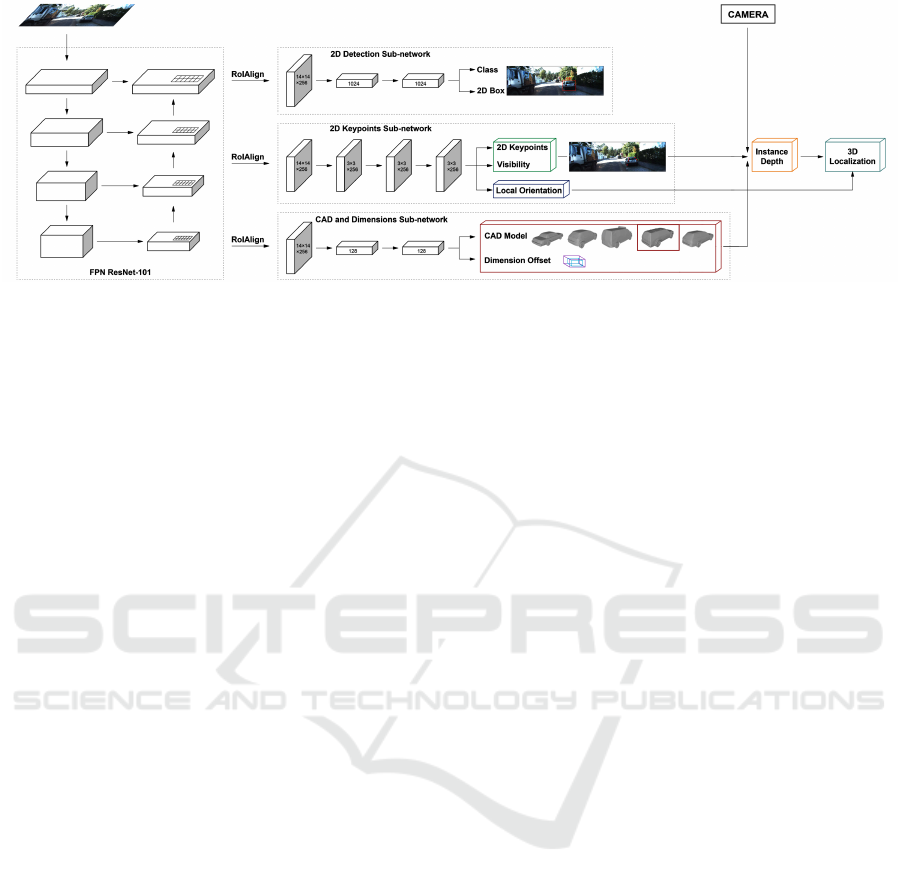
Figure 2: An overview of our monocular 3D detection architecture (text best viewed in zoom). We start with a universal
backbone network (Mask R-CNN (He et al., 2017)) and complement it with three sub-networks: 2D object detection sub-
network, 2D keypoints regression sub-network, and dimension regression sub-network. The network is trained end-to-end
using a multi-task loss function.
2D Object Detection. For 2D detection, we fol-
low the original Mask R-CNN architecture (He et al.,
2017), which includes Feature Pyramid Network
(FPN) (Lin et al., 2017a), Region Proposal Network
(RPN) (Ren et al., 2015) and RoIAlign module (He
et al., 2017). The RPN generates 2D anchor-boxes
with a set of fixed aspect ratios and scales through-
out the area of the provided feature maps, which are
scored for the presence of the object of interest and
adjusted. The spatial diversity of the proposed loca-
tions is processed by the RoIAlign block, converting
each feature map, framed by the region of interest,
into a fixed-size grid, preserving an accurate spatial
location through bilinear interpolation. Followed by
fully connected layers, the network splits into two fea-
ture sharing branches for the bounding box regression
and object classification. During training, we utilize a
sum of smooth L
1
and cross-entropy loss for each task
respectively as our 2D detection loss L
2d
, as proposed
by (Ren et al., 2015). Though we do not directly uti-
lize the predicted 2D bounding boxes, we have exper-
imentally observed the 2D detection sub-network to
stabilize training.
2D Keypoint Detection. As described in greater
detail in Section 4.1, we have created keypoint an-
notations for object instances encountered in the im-
ages of our training set (see Figure 3 and its caption
for the details on our choice of the keypoints). Thus,
using our 2D object detection sub-network, we learn
to predict coordinates k
(x,y)
= (x
k
,y
k
) and a visibil-
ity state v
k
for each of the manually-chosen 14 key-
points K = {(x
k
,y
k
,v
k
)
14
k=1
}. Unlike suggested in (He
et al., 2017; Tompson et al., 2014), we directly regress
onto 2D coordinates of keypoints. The visibility state,
determined by the occlusion and truncation of an in-
stance, is a binary variable, and no difference between
occluded, self-occluded and truncated states is made.
Producing visibility estimates helps propagate infor-
mation during training for visible keypoints only and
acts as an auxiliary supervision for orientation sub-
network. During training, similar to our 2D object de-
tection sub-network, we minimize the multi-task loss
combining smooth L
1
loss for coordinates regression
and cross-entropy loss for visibility state classifica-
tion, defined as:
L
coord
=
K
∑
k=1
1
k
· L
smooth
1
k
gt
(x,y)
,k
pred
(x,y)
,
L
vis
= −
K
∑
k=1
v
gt
k
logv
pred
k
,
L
kp
= L
coord
+ L
vis
,
(1)
where 1
k
is the visibility indicator of k-th keypoint,
while k
gt
(x,y)
and k
pred
(x,y)
denote ground-truth and pre-
dicted 2D coordinates, normalized and defined in a
reference frame of a specific feature map post RoI-
alignment. Similarly, v
gt
k
is the ground truth visibil-
ity status, while v
pred
k
is the estimated probability that
keypoint k is visible.
3D Dimension Estimation and Geometric Clas-
sification. To each annotated 3D instance in the
dataset, we have assigned a 3D CAD model out of
a predefined set of 5 templates, obtaining 5 distinct
geometric classes of instances. The assignment has
been made based on the width, length and height ra-
tios only. For each geometric class, we have com-
puted mean dimensions (µ
w
,µ
h
,µ
l
) over all assigned
annotated 3D instances.
During training the 3D dimension estimation and
geometric class selection sub-network, we utilize a
multi-task loss combining cross-entropy loss (for the
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
654

geometric class selection) and a smooth L
1
loss for
dimension regression. Instead of regressing the abso-
lute dimensions, we predict the differences D
offset
=
(∆w,∆h,∆l) = (w − µ
w
,h − µ
h
,l − µ
l
) from the mean
dimensions in the log-space:
L
dim
= smooth
L
1
log(D
gt
offset
− D
pred
offset
)
, (2)
where D
gt
offset
and D
pred
offset
represent the ground-truth
and predicted offsets to the class mean values along
each dimension, respectively.
Reasoning about Instance Depth. We define in-
stance depth as the depth Z of a vertical plane pass-
ing through the two closest of visible keypoints, de-
fined in the camera reference frame. To compute this
depth value, we use predicted 2D keypoints (x
1
,y
1
)
and (x
2
,y
2
), instance height h (in meters), and its ge-
ometric class. First, we select two keypoints (x
1
,y
1
)
and (x
2
,y
2
) detected in the image and compute their
y-difference h
p
= |y
1
− y
2
|. We then select the corre-
sponding two keypoints (x
cad
1
,y
cad
1
) and (x
cad
2
,y
cad
2
) in
3D CAD model reference frame and compute their
height ratio r
cad
= y
cad
1
/y
cad
2
. Finally, the distance
to the object Z is defined from the pinhole camera
model:
Z = f ·
r
cad
· h
h
p
, (3)
where f is a focal length of the camera, known for
each frame. Figire 1 illustrates this computation.
Depth coordinate Z allows to retrieve the remaining
3D location coordinates of one of the selected key-
points, using the back-projection mapping:
X = Z ·
x
{1,2}
− p
x
f
, Y = Z ·
y
{1,2}
− p
y
f
, (4)
giving predictions k
pred
(X,Y,Z)
= (X
k
,Y
k
,Z
k
),k ∈ {1,2},
where (p
x
, p
y
) are the camera principal point coordi-
nates in pixels and (x
1
,y
1
) and (x
2
,y
2
) are predicted
2D keypoints.
In this computation, we use the two closest of de-
tected visible keypoints, which commonly results in
selecting keypoints physically located at instance cor-
ners. We note that this step is crucial to the success
of our method, as, if no keypoints are visible on the
instance, we fail to recover its depth and precisely lo-
calize it (even though it may not be entirely occluded).
Orientation Estimation. Direct estimation of ori-
entation R in a camera reference frame is not feasible,
as the region proposal network propagates the con-
text within the crops solely, cutting off the relation of
the crop to the image plane. Inspired by (Mousavian
et al., 2017), we represent the global orientation as a
combination of two rotations with azimuths defined
as:
θ = θ
loc
+ θ
ray
, (5)
where θ
loc
is the object’s local orientation within the
region of interest, and θ
ray
is a ray direction from
the camera to the object center, directly found from
the 3D location coordinates. We estimate θ
loc
using
a modification of the MultiBin approach (Mousavian
et al., 2017). Specifically, instead of splitting the ob-
jective into angle confidence and localization parts,
we discretize the angle range from 0
◦
to 360
◦
degrees
into 72 non-overlapping bins and compute the proba-
bility distribution over this set of angles by a softmax
layer. We train the local orientation sub-network us-
ing cross-entropy as a loss function. To obtain the
final prediction for θ
loc
, we utilize the weighted mean
of the bins medians (W M(θ
loc
)), adopting the softmax
output as the weights. Given 3D location coordinates
(X,Z) of one of the keypoints and the weighted mean
local orientation W M(θ
loc
), the global orientation is:
θ = W M(θ
loc
) + arctan
X
Z
. (6)
3D Object Detection. To obtain the center C of
the final 3D bounding box, we use the global ori-
entation R and the distance between the keypoint
and the object center. For a particular CAD model,
given the weight, height and length ratio between
the selected keypoint and the object center r
cad
=
(x
cad
1
/x
cad
2
,y
cad
1
/y
cad
2
,z
cad
1
/z
cad
2
) estimated object di-
mensions D and global orientation R, the location C
is predicted as
C = (X,Y,Z) ± R · D r
cad
, (7)
where stands for an element-wise product. Depend-
ing on the selected keypoint position (left or right,
etc.), a sign is chosen for each dimension.
Multi-head Reprojection Consistency Loss. One
approach when training the system would be to opti-
mize a sum of losses suffered by individual compo-
nents:
L = L
2d
+ L
kp
+ L
dim
+ L
ori
. (8)
However, while each sub-network is independent of
its neighbors and unaware of other predictions, its ge-
ometric components are strongly interrelated. To pro-
vide consistency between the network branches, we
introduce a loss function which integrates all the pre-
dictions. Predicted 3D keypoint coordinates k
pred
(X,Y,Z)
in a CAD model coordinate frame are scaled using
D, rotated using R, translated using C, and back-
projected into the image plane via camera projection
matrix to obtain 2D keypoint coordinates k
pred+proj
(x,y)
=
Monocular 3D Object Detection via Geometric Reasoning on Keypoints
655
Project(k
pred
(X,Y,Z)
). A similar approach is applied to the
eight corners K
c
of the 3D bounding box obtained
from 3D detection and orientation estimates, to ensure
that they fit tightly into the ground truth 2D bounding
box after back-projection. This leads us to adding the
reprojection consistency loss L
repro
to the final opti-
mization:
L
repro
=
∑
k∈K∪K
c
smooth
L
1
k
pred+proj
(x,y)
− k
gt
(x,y)
,
L = L
2d
+ L
kp
+ L
dim
+ L
ori
+ L
repro
.
(9)
4 EXPERIMENTS
4.1 Dataset Annotation
We train and evaluate our approach using the KITTI
3D object detection benchmark dataset, selecting only
objects of class “car”. For the sake of comparison
with state-of-the-art methods, we follow the setup
presented in (Chen et al., 2016), which provides 3712
and 3769 images for training and validation, respec-
tively, along with the camera calibration data. To
extend KITTI dataset with assignment of geometric
classes using CAD models and keypoints 2D coordi-
nates, we employ the approach and data provided in
(Xiang et al., 2015). Depending on the ratios between
height, length and width, each car instance is associ-
ated with one of five 3D CAD model classes from a
predefined set of CAD templates, presented on Fig-
ure 2. We manually annotated each CAD model with
14 keypoint locations, ending up with a total human
labour of 70 annotations in the entire dataset. Fig-
ure 3 displays an example of the annotated keypoints,
most of which are a common choice (Everingham
et al., 2010) due to their interpretability, such as the
car’s edges, carcass, etc.; we also included corners of
windshields to deal with the height of each instance.
To obtain 2D coordinates of the keypoints, we back-
projected CAD models from 3D space to the image
plane using ground truth location, dimension and ro-
tation values. Simultaneous projection of all 3D CAD
models on a scene provides us with a depth ordering
mask, allowing for defining the visibility state of each
keypoint.
4.2 Experimental Setup
Network Architecture. We utilize Mask R-CNN
with a Feature Pyramid Network (Lin et al., 2017a),
based on a ResNet-101 (He et al., 2016) as our back-
bone network for the multi-level feature extraction.
Instead of the higher resolution 14 × 14 and 28 × 28
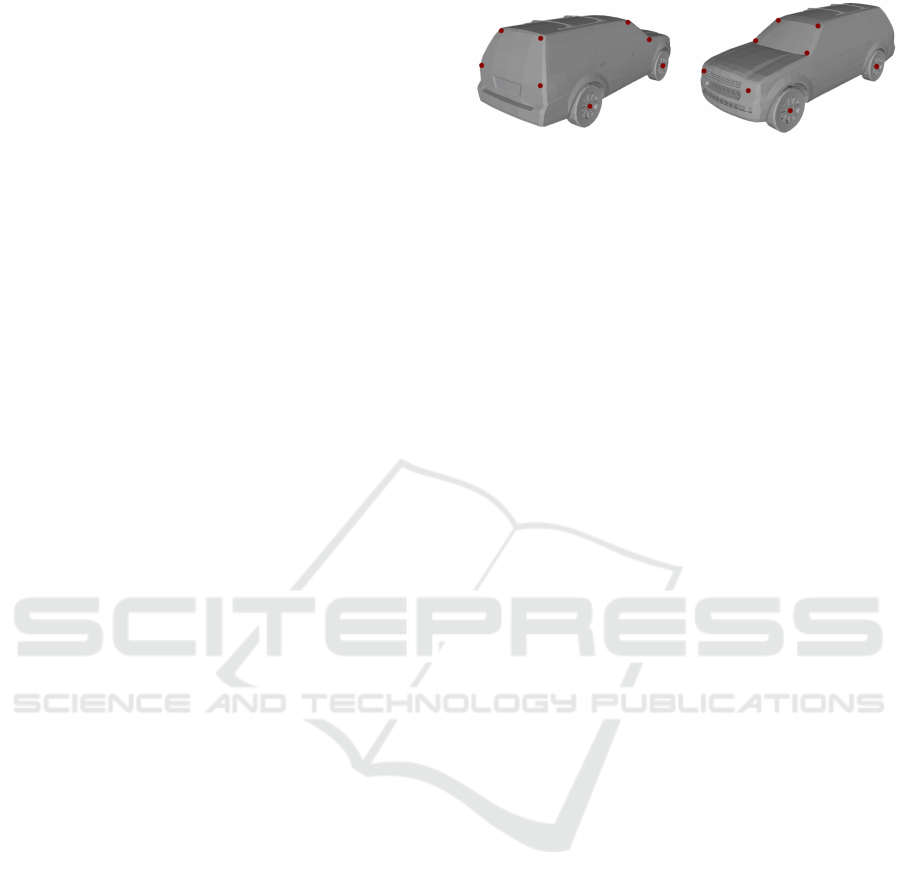
Figure 3: An example of our annotation of 3D keypoints.
We label 4 centers of wheels, 8 corners of front and back
windshields per each, and 2 centers of headlights. Per each
3D CAD model, we form the annotation so as to ensure that
the two keypoints on each of the windshields form near-
vertical lines.
feature maps in the original architecture, we stack the
same amount of 3×3 kernels, followed by a fully con-
nected layer to predict 2D normalized coordinates and
visibility states for each of the 14 keypoints. From the
same feature maps, we branch a fully-connected layer
predicting local orientation in bins of 5
◦
each, total-
ing 72 output units. The feature sharing between key-
points and local orientation was found crucial for net-
work performance, as both characteristics imply sim-
ilar geometric reasoning. In parallel to 2D detection
and 2D keypoints estimation, we create a sub-network
of a similar architecture for dimension regression and
classification into geometric classes. The remaining
components, including RPN, RoIAlign, bounding box
regression and classification heads, are implemented
following the original Mask R-CNN design. For in-
stance depth retrieval we use only four pairs of key-
points: corners of the front and rear windows. Other
keypoints are used for additional supervision in con-
sistency loss calculation during training.
Model Optimization Details. We set hyperparam-
eters following Mask R-CNN work (He et al., 2017).
The RPN anchor set covers five scales, adjusting them
to the values of 4, 8, 16, 32, 64, and three default
aspect ratios. Each mini-batch consists of 2 images,
producing 256 regions of interest, with a positive to
negative samples ratio set 1:3, to achieve class sam-
pling balance during training. Any geometric aug-
mentations over the images are omitted, solely ap-
plying image padding to meet the network architec-
ture requirements. ResNet-101 is initialized with the
weights pre-trained on Imagenet (Deng et al., 2009),
and frozen during further training steps. We first
train the 2D detection and classification sub-network
for 100K iterations, adopting Adam optimizer with
a learning rate of 10
−4
throughout the training, set-
ting weight decay of 0.001 and momentum of 0.9.
Then 2D keypoints and local orientation are trained
for 50K iterations. Finally, enabling the multi-head
consistency loss, the whole network is trained in an
end-to-end fashion for 50K iterations. We combine
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
656

Table 1: 3D detection performance: Average Precision of 3D bounding boxes on KITTI val set. The best score is in bold,
the second best underlined. Ours (+loss) indicates a base network setup, trained with a consistency reprojection loss.
Method
IoU = 0.5 IoU = 0.7
Easy Moderate Hard Easy Moderate Hard
Mono3D (Chen et al., 2016) 25.19 18.20 15.52 2.53 2.31 2.31
OFT-Net (Roddick et al., 2018) - - - 4.07 3.27 3.29
MonoGRNet (Qin et al., 2019) 50.51 36.97 30.82 13.88 10.19 7.62
MF3D (Xu and Chen, 2018) 47.88 29.48 26.44 10.53 5.69 5.39
MonoDIS (Simonelli et al., 2019) - - - 18.05 14.98 13.42
Ours 48.81 30.17 20.07 11.91 6.64 4.28
Ours (+loss) 50.82 31.28 20.21 13.96 7.37 4.54
losses from all of the network outputs, weighting
them equally.
Evaluation Metrics. We evaluate the network un-
der the conventional KITTI benchmark protocol,
which enables comparison across approaches. Car
category is the sole subject of our focus. By de-
fault, KITTI settings require evaluation in 3 regimes:
easy, moderate and hard, depending on the instance
difficulty of a potential detection. 3D bounding box
detection performance implies 3D Average Precision
(AP3D) evaluation, setting Intersection over Union
(IoU) threshold to 0.5 and 0.7.
4.3 Experimental Results
3D Object Detection. We compare the perfor-
mance with 5 monocular 3D object detection meth-
ods: Mono3D (Chen et al., 2016), OFT-Net (Roddick
et al., 2018), MonoGRNet (Qin et al., 2019), MF3D
(Xu and Chen, 2018), and MonoDIS (Simonelli et al.,
2019), which reported their results on the same vali-
dation set for the car class. We borrow the presented
average precision numbers from their published re-
sults. The results are reported in Table 1. The ex-
periments show that our approach outperforms state-
of-the-art methods on the easy subset by a small mar-
gin while remaining the second best on the moderate
subset. This observation aligns with our intuition that
visible salient features such as keypoints are crucial
to the success of 3D pose estimation. For the moder-
ate and hard images, 2D keypoints are challenging to
robustly detect due to the high occlusion level or the
low resolution of the instance. We also measure the
effect of the reprojection consistency loss on our net-
work performance, observing a positive effect of our
loss function.
3D Bounding Box and Global Orientation Estima-
tion. We follow the experiment presented in (Qin
et al., 2019), evaluating the quality of the 3D bound-
ing boxes sizes estimation, as well as the orientation
in a camera coordinate system. We present our mean
errors along with those of (Qin et al., 2019; Chen
et al., 2016), borrowed from their work, in Table 2.
Table 2: 3D bounding box and orientation mean errors:
The best score is in bold, the second best underlined.
Method
Size (m)
Ori. (rad)
Height Width Length
Mono3D 0.172 0.103 0.504 0.558
MonoGRNet 0.084 0.084 0.412 0.31
Ours 0.115 0.107 0.516 0.215
Ours (+loss) 0.101 0.091 0.403 0.191
Though, the sizes of the 3D bounding boxes do not
differ severely among the approaches, due to the es-
timating the offset from the median bounding box,
the orientation estimation results differ significantly.
Since we retrieve global orientation via geometric
reasoning, learning local orientation from 2D image
features, the network provides more accurate predic-
tions, in contrast to obtaining orientation from the re-
gressed 3D bounding box corners.
Qualitative Results. We provide a qualitative illus-
tration of the network performance in Figure 4, dis-
playing six road scenes with distinct levels of diffi-
culty. In typical cases, our approach produces ac-
curate 3D bounding boxes for all instances, along
with the global orientation and 3D location. Remark-
ably, the truncated objects can also be successfully
detected, given that only one pair of keypoints hits
the image. Some hard cases, i.e. (e) and (f), primarily
consist of objects that are distant, highly occluded or
even invisible on the image. We believe such failure
cases to be a common limitation of monocular image
processing methods.
5 CONCLUSIONS
In this work, we presented a novel deep learning-
based framework for monocular 3D object detection
Monocular 3D Object Detection via Geometric Reasoning on Keypoints
657

(a) (b) (c)
(d) (e) (f)
Figure 4: Qualitative results. The upper part of each sub-figure contains 2D detection inference, including 2D bounding and
2D locations of the visible keypoints. Each instance and its keypoints are displayed their distinctive color. The lower part
visualizes the 3D point cloud, showing the camera location as the colored XYZ axes. Green and red colors stand for the
ground truth and predicted 3D bounding boxes respectively. The scenes were selected to express diversity in complexity and
cars positioning w.r.t. the camera.
combining well-known detectors with geometric rea-
soning on keypoints. We proposed to estimate cor-
respondences between the detected 2D keypoints and
their 3D counterparts annotated on the surface of 3D
CAD models to solve the object localization prob-
lem. Results of the experimental evaluation of our ap-
proach on the subsets of the KITTI 3D object detec-
tion benchmark demonstrate that it outperforms the
competing state-of-the-art approaches when the tar-
get objects are clearly visible, leading us to hypothe-
size that dense depth estimation is redundant for 3D
detection in some instances. We have demonstrated
our multi-task reprojection consistency loss to signif-
icantly improve performance, in particular, the orien-
tation of detections.
ACKNOWLEDGEMENT
E. Burnaev and A. Artemov were supported by the
Russian Science Foundation Grant 19-41-04109.
REFERENCES
Chabot, F., Chaouch, M., Rabarisoa, J., Teuli
`
ere, C., and
Chateau, T. (2017). Deep manta: A coarse-to-fine
many-task network for joint 2d and 3d vehicle analysis
from monocular image. In CVPR, pages 2040–2049.
Chen, X., Kundu, K., Zhang, Z., Ma, H., Fidler, S., and
Urtasun, R. (2016). Monocular 3d object detection
for autonomous driving. In CVPR, pages 2147–2156.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2017). Multi-
view 3d object detection network for autonomous
driving. In CVPR, pages 1907–1915.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In CVPR, pages 248–255. Ieee.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. IJCV, 88(2):303–338.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. IJRR,
32(11):1231–1237.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In CVPR, pages 3354–3361. IEEE.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
658

Godard, C., Mac Aodha, O., and Brostow, G. J. (2017). Un-
supervised monocular depth estimation with left-right
consistency. In CVPR, pages 270–279.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In ICCV, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In CVPR, pages
770–778.
Hejrati, M. and Ramanan, D. (2012). Analyzing 3d objects
in cluttered images. In NIPS, pages 593–601.
Ku, J., Mozifian, M., Lee, J., Harakeh, A., and Waslander,
S. L. (2018). Joint 3d proposal generation and object
detection from view aggregation. In IROS, pages 1–8.
IEEE.
Lang, A. H., Vora, S., Caesar, H., Zhou, L., Yang, J., and
Beijbom, O. (2019). Pointpillars: Fast encoders for
object detection from point clouds. In CVPR, pages
12697–12705.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In CVPR, pages 2117–2125.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
ICCV, pages 2980–2988.
Liu, S., Qi, L., Qin, H., Shi, J., and Jia, J. (2018). Path
aggregation network for instance segmentation. In
CVPR, pages 8759–8768.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In ECCV, pages 21–37. Springer.
Martinez, J., Hossain, R., Romero, J., and Little, J. J.
(2017). A simple yet effective baseline for 3d human
pose estimation. In ICCV, pages 2640–2649.
Mehta, D., Rhodin, H., Casas, D., Fua, P., Sotnychenko,
O., Xu, W., and Theobalt, C. (2017a). Monocular 3d
human pose estimation in the wild using improved cnn
supervision. In 3DV, pages 506–516. IEEE.
Mehta, D., Sridhar, S., Sotnychenko, O., Rhodin, H.,
Shafiei, M., Seidel, H.-P., Xu, W., Casas, D., and
Theobalt, C. (2017b). Vnect: Real-time 3d human
pose estimation with a single rgb camera. ACM ToG,
36(4):44.
Mousavian, A., Anguelov, D., Flynn, J., and Kosecka, J.
(2017). 3d bounding box estimation using deep learn-
ing and geometry. In CVPR, pages 7074–7082.
Qin, Z., Wang, J., and Lu, Y. (2019). Monogrnet: A ge-
ometric reasoning network for monocular 3d object
localization. In AAAI, volume 33, pages 8851–8858.
Ramakrishna, V., Kanade, T., and Sheikh, Y. (2012). Recon-
structing 3d human pose from 2d image landmarks. In
ECCV, pages 573–586. Springer.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In CVPR, pages 779–788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In NIPS, pages 91–99.
Roddick, T., Kendall, A., and Cipolla, R. (2018). Ortho-
graphic feature transform for monocular 3d object de-
tection. arXiv preprint arXiv:1811.08188.
Simonelli, A., Bul
`
o, S. R. R., Porzi, L., L
´
opez-Antequera,
M., and Kontschieder, P. (2019). Disentangling
monocular 3d object detection. arXiv preprint
arXiv:1905.12365.
Tompson, J. J., Jain, A., LeCun, Y., and Bregler, C. (2014).
Joint training of a convolutional network and a graph-
ical model for human pose estimation. In NIPS, pages
1799–1807.
Wu, J., Xue, T., Lim, J. J., Tian, Y., Tenenbaum, J. B.,
Torralba, A., and Freeman, W. T. (2016). Single im-
age 3d interpreter network. In ECCV, pages 365–382.
Springer.
Xiang, Y., Choi, W., Lin, Y., and Savarese, S. (2015). Data-
driven 3d voxel patterns for object category recogni-
tion. In ICCV.
Xu, B. and Chen, Z. (2018). Multi-level fusion based 3d
object detection from monocular images. In CVPR,
pages 2345–2353.
Yan, Y., Mao, Y., and Li, B. (2018). Second:
Sparsely embedded convolutional detection. Sensors,
18(10):3337.
Yang, B., Luo, W., and Urtasun, R. (2018). Pixor: Real-
time 3d object detection from point clouds. In CVPR,
pages 7652–7660.
Zhou, Y. and Tuzel, O. (2018). Voxelnet: End-to-end learn-
ing for point cloud based 3d object detection. In
CVPR, pages 4490–4499.
Monocular 3D Object Detection via Geometric Reasoning on Keypoints
659
