
Towards Visual Loop Detection in Underwater Robotics using a
Deep Neural Network
Antoni Burguera
a
and Francisco Bonin-Font
b
Universitat de les Illes Balears, Ctra. Valldemossa Km. 7.5, Palma (Illes Balears), 07122, Spain
Keywords:
Underwater Robotics, Loop Closing, Neural Network, SLAM.
Abstract:
This paper constitutes a first step towards the use of Deep Neural Networks to fast and robustly detect under-
water visual loops. The proposed architecture is based on an autoencoder, replacing the decoder part by a set
of fully connected layers. Thanks to that it is possible to guide the training process by means of a global image
descriptor built upon clusters of local SIFT features. After training, the NN builds two different descriptors
of the input image. Both descriptors can be compared among different images to decide if they are likely
to close a loop. The experiments, performed in coastal areas of Mallorca (Spain), evaluate both descriptors,
show the ability of the presented approach to detect loop candidates and favourably compare our proposal to a
previously existing method.
1 INTRODUCTION
One of the most important requirements to perform
Simultaneous Localization and Mapping (SLAM)
(Durrant-Whyte and Bailey, 2006) is the so called
loop detection. This task, aimed at deciding if an area
observed by the robot was previously visited, makes
it possible to improve both the robot pose estimates
and the map of the environment.
Since the use of cameras to perform SLAM has
gained popularity in the last years (Taketomi et al.,
2017), visual loop detection is nowadays one of the
most prolific research fields in mobile robotics (Mur-
Artal and Tardos, 2017). In this context, loop detec-
tion consists in deciding if two images depict overlap-
ping parts of the environment.
The existing approaches to visual loop detection
can be divided in three categories. The first one is
based on matching local descriptors by means of ro-
bust techniques. For example, (Burguera et al., 2015)
performs detection and matching of Scale Invariant
Feature Transform (SIFT) between two images and
searches for a sufficient number of consistent matches
using Random Sample Consensus (RANSAC) to de-
cide if they close a loop.
The second category relies on global image de-
scriptors. These approaches build image descriptors
a
https://orcid.org/0000-0003-2784-2307
b
https://orcid.org/0000-0003-1425-6907
that can be easily compared to decide if they depict
overlapping regions or not. As an example, (Negre-
Carrasco et al., 2016) builds hash-based descriptors.
The images whose descriptors are close in the Eu-
clidean sense are more likely to close a loop. Other
global descriptors, such as Vector of Locally Aggre-
gated Descriptors (VLAD) (J
´
egou et al., 2010) or Bag
of Words (BoW) (Ciarfuglia et al., 2012) have also
proved to successfully detect visual loops.
The third category makes use of Neural Networks
(NN). Some of these approaches (Merril and Huang,
2018) rely on the ability of Convolutional Neural Net-
works (CNN) to learn features thus removing the need
for pre-engineered features such as SIFT. Other ap-
proaches propose a Deep Neural Network (DNN) to
learn the parameters of a pre-engineered global de-
scriptor (Arandjelovic et al., 2018).
Even though the aforementioned studies lead to
high detection rates, they still have some impor-
tant flaws. For example, methods relying on pre-
engineered descriptors, either global or local, are
usually constrained to certain types of environments
since the used descriptors have been designed to de-
tect some particularities that may not be present in all
scenarios. Methods relying on DNN are more general
in the sense that they can be trained for every spe-
cific environment where the robot has to be deployed.
However, DNN require large amounts of data to be
properly trained. They also need considerably high
training times, and finally, even the loop detection
Burguera, A. and Bonin-Font, F.
Towards Visual Loop Detection in Underwater Robotics using a Deep Neural Network.
DOI: 10.5220/0009162806670673
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
667-673
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
667

process can be long enough to be hardly affordable
for real time operation. These problems are magni-
fied in underwater robotics for the following reasons:
a) Underwater imagery (Bonin-Font et al., 2013)
is affected by several problems such as reduced range,
flickering, blur, haze, refraction, reflection or lack of
illumination, among many others, that can be usually
neglected in aerial or terrestrial robotics. This renders
most of the existing methods based on pre-engineered
descriptors less robust.
b) Even though DNN are good candidates to re-
duce the mentioned problem, the lack of NN pre-
trained with underwater imagery and the technical
difficulty to gather large underwater datasets makes
it difficult to use them. Moreover, Autonomous Un-
derwater Vehicles (AUV) tend to have limited com-
putational power in order to reduce the payload and
the battery usage and, so, on-line loop detection using
DNN is usually too computationally expensive.
c) AUVs usually perform visual SLAM by nav-
igating close to sea floor and using bottom-looking
cameras. This configuration is not common in terres-
trial robotics and most of the existing place recogni-
tion studies rely on forward-looking cameras. These
differences pose additional problems if they are not
properly taken into account. For example, two images
closing a loop gathered by a bottom looking camera
are likely to be significantly rotated one with respect
to the other whilst rotation in the image plane is ex-
tremely unusual when using forward looking cam-
eras. This complicates taking profit of terrestrial
datasets to train these NN and jeopardizes the use of
transfer learning from other NN trained with terres-
trial data.
d) Performing large scale missions with an AUV is
especially problematic mainly because of their strict
dependence on batteries that cannot be recharged dur-
ing the mission unless an expensive infrastructure,
such as a support ship, is available. The common ap-
proach to deal with these scenarios is to divide the
large mission in a set of smaller missions called ses-
sions. In this context, called Multi-Session SLAM
(Burguera and Bonin-Font, 2019), the AUV must de-
tect loops not only within each session but also among
sessions. Since the time between sessions can be ar-
bitrarily large, ranging from a hours to months, the
visual conditions and even the environment itself can
be significantly different, thus requiring particularly
robust methods.
This paper constitutes a first step towards visual
loop detection in underwater scenarios dealing with
the aforementioned problems and assuming an AUV
with a bottom-looking camera. To this end, we ex-
plore the use of a NN simple enough to be easily train-
able with a small amount of images and fast enough
to be used on-line in an AUV with low computa-
tional capabilities. We also explore the use of a pre-
engineered global image descriptor to guide the train-
ing process. More specifically, our proposal is based
on an autoencoder architecture with the decoder part
changed to fully connected layers providing an output
compatible with the mentioned global descriptor.
The NN is trained to output, for a given image, a
descriptor that is similar to the descriptor of another
image that closes a loop with the former image. After
training, both the learnt descriptor and the latent rep-
resentation in the inner convolutional layers can be
used to fast and reliably compare images and detect
loops.
The experimental results, performed in coastal ar-
eas of Mallorca (Spain), show the ability of this pro-
posal to detect loops, compares it favourably to a pre-
viously existing method and also shows the superior-
ity of the NN with respect to the raw use of the pre-
engineered descriptor.
2 OVERVIEW
Image autoencoders (Rezende et al., 2014) are NN
aimed at providing an output identical to the input im-
age. These NN operate in two main steps. The first
one, performed by the so called encoder, is in charge
of mapping the input image into a latent space of
smaller dimensionality. The second step, performed
by the decoder, maps the latent space back to the orig-
inal image space, thus increasing the dimensionality.
Even though the output of an autoencoder is not
particularly useful, since it mimics the input, the
learned latent representation is said to contain use-
ful image features. Some implementations, such as
the Variational Autoencoders (VAE), are aimed at
learning semantically meaningful latent representa-
tions (Kingma and Welling, 2014).
Our proposal is to take advantage of these ideas
to learn the features that define loop closings instead
of those that define the images individually. Once
learned, these features can be used to compare two
images and decide if they depict overlapping areas or
not. Accordingly, our proposal is similar to the use of
global image descriptors, though the descriptor itself
is learned instead of pre-engineered, thus providing a
more general solution adaptable to different environ-
ments.
Since the goal is to learn loop closings, instead
of using the same image as input and target our pro-
posal is that input and target come from two different
loop closing images. Contrarily to standard autoen-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
668

coders, the image space is not a good choice for the
NN output since it is not invariant to rotation or scal-
ing, and barely robust in front of shifting. These trans-
formations being the most relevant in visual loops us-
ing bottom-looking cameras an alternative space is re-
quired. In consequence, it is necessary to define a way
to represent an image that is robust in front of these
transformations. The proposed representation, called
Global Image Descriptor (GID) is described in Sec-
tion 3.
Using the GID makes it necessary to change the
standard autoencoder architecture to be usable with
it. Overall, the idea is to define an autoencoder based
architecture able to learn the latent representation of
loops by using one image as input and targeting the
GID of another image that closes a loop with it, thus
input and output spaces being different. This archi-
tecture is described in Section 4.
3 THE GLOBAL IMAGE
DESCRIPTOR
The GID is not aimed at robust loop detection. In-
stead, its goal is to provide an appropriate space where
two loop closing images can be projected so that both
projections are comparable. This space is necessary,
since, as it has been mentioned before, the image
space used by standard autoencoders is not useful to
perform loop detection.
In this way, the NN will be trained to mimic the
GID of one image using another image that closes a
loop with it as input. By targeting the GID, the NN
will learn useful features of loop closing images sim-
ilarly to autoencoders which learn useful features of
the images themselves. Thus, the GID is only com-
puted to train the system and is not required after
training.
For a GID to be useful in this context, it has to
meet two main requirements. On the one hand, it must
have a fixed length for images of the same size, since
it will be targeted by a NN. On the other hand, it must
be comparable between images, so that a loss function
can be defined to train the network. The Histogram of
Oriented Gradients (HOG) meets these two require-
ments and that is why it has been successfully used to
perform place recognition (Merril and Huang, 2018).
However, when it comes to underwater imagery
using a bottom-looking camera, an additional require-
ment arises: the GID must be invariant to large ro-
tations and translations, significant scaling and, in
case of Multi-Session SLAM, to changes in the envi-
ronmental conditions. Unfortunately, HOG does not
meet these requirements and a different GID has to be
Figure 1: Summary of the GID building process.
used. Our proposal is to build the GID upon SIFT,
which has shown to be invariant to all these changes.
Directly using SIFT is not possible since the two
aforementioned main requirements are not met. For
example, even though a SIFT descriptor has a fixed
length, the number of descriptors can change from
one image to another, being thus difficult to create a
fixed length vector. Also, SIFT detectors do not find
the features in any particular order. Because of that,
although individual descriptors can be compared us-
ing Euclidean distance, an arbitrary ensemble of de-
scriptors is not. Accordingly, a method to deal with
these two issues is required.
Several approaches (Perronnin and Dance, 2007;
J
´
egou et al., 2010), mostly of them based on the Fisher
kernel (Jaakkola and Haussler, 1999), exist to achieve
this goal. Our proposal is to aggregate the SIFT de-
scriptors based on a distance criterion and sort the
clusters depending on the number of corresponding
descriptors. This process, summarized in Figure 1, is
detailed next.
Given one image, the first step is to compute the
SIFT descriptors SD = {d
0
, d
1
, ··· , d
n
}. Each d
i
is a
vector of fixed size (128) but the number of descrip-
tors n changes from one image to another. These de-
scriptors can be compared using the L2-norm so that,
ideally, ||d
i
−d
j
|| ' 0 if and only if the regions around
features i and j depict a visually similar region of the
environment.
Afterwards, a codebook SC = {c
0
, c
1
, ··· , c
K
} of
K visual words is built by applying K-Means to SD.
Each c
i
is the centroid of the i-th cluster found by K-
Means, which constitutes a representative of the vi-
sual appearance shared between the descriptors be-
longing to the cluster
Since each cluster contains descriptors corre-
sponding to visually similar regions, the number of
features assigned to the cluster represents the visual
importance of the corresponding centroid. Because
of that, our proposal is to sort the centroids in SC ac-
Towards Visual Loop Detection in Underwater Robotics using a Deep Neural Network
669

cording to the number of descriptors assigned to the
corresponding cluster. Let SS denote the sorted SC.
In this way, similar images will lead similarly sorted
centroids. Let the GID be the result of flattening SS
into a 1D tensor of size DS = K · 128. In this way,
since each descriptor and thus each centroid can be
compared using the L2-norm, two GID coming from
two different images can also be compared using the
Euclidean distance.
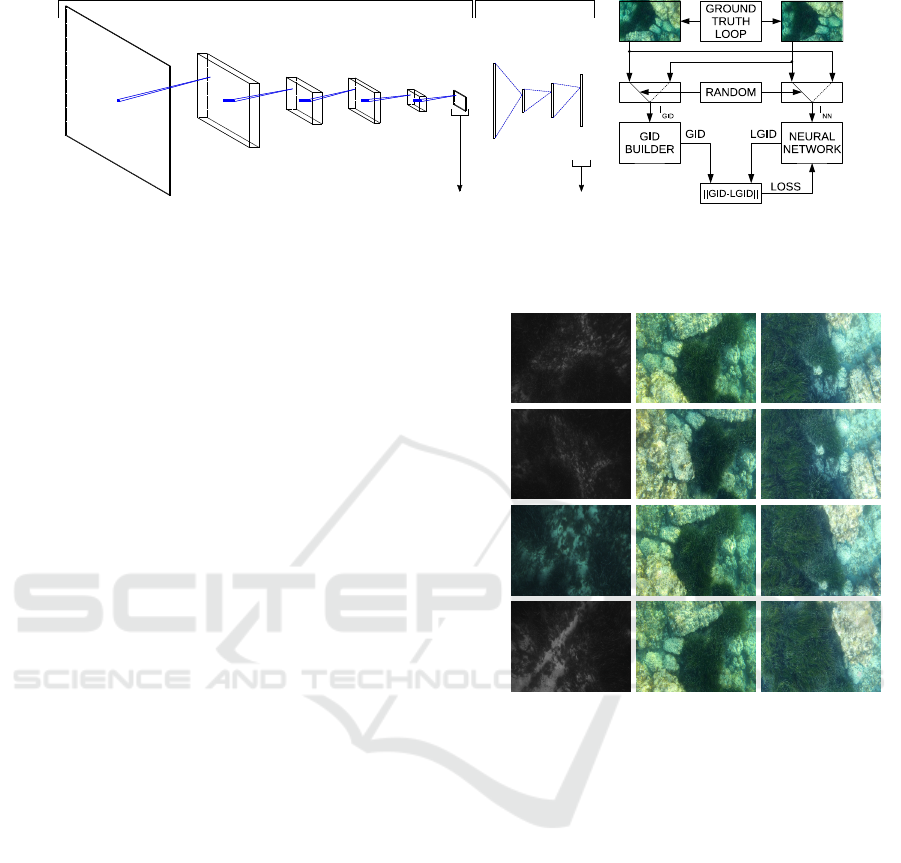
4 THE NEURAL NETWORK
The proposed architecture, which is based on an
autoencoder and follows the ideas by (Merril and
Huang, 2018), is summarized in Figure 2-a. As it can
be observed, our proposal has a set of convolutional
and pooling layers that define the encoder aimed at re-
ducing the data dimensionality. In particular, we use
sets of convolutional layers with sigmoid activation
functions and maxpooling.
The decoder significantly differs from the ones in
autoencoders. Since the NN output is not an image
but a GID, the decoder does not perform transposed
convolutions and pooling. Instead, it goes from the
latent representation to the GID space through a set
of dense layers with sigmoid activation functions, the
last one having the size of the GID.
The process of training the NN is summarized in
Figure 2-b. The ground truth is composed of couples
of underwater images closing loops between them.
One of these two images is randomly chosen to be the
NN input. Let this image be named I
NN
. The other
image, named I
GID
, is used to compute the GID. This
random selection prevents training biases and reduce
overfitting since the training sets will slightly differ
between epochs.
The training is aimed at reconstructing the GID
corresponding to I
GID
given I
NN
. Let the GID recon-
structed by the NN be referred to as the Learned GID
(LGID). The L2 loss function is used to compare the
GID and the LGID since the Euclidean distance is a
good metric to compare two GID.
Once the system is trained, it can be used to build
either the LGID or the Learned Features (LF). The
LF is the output of the encoder part and constitutes
the latent space, as shown in Figure 2-a. To ease no-
tation, let D
i
denote the LGID or the LF, indistinctly,
obtained from image I
i
. The effects of using the for-
mer or the latter will be experimentally assessed in
Section 5.
The Euclidean distance between D
i
and D
j
pro-
vides information about how likely is for I
i
and I
j
to close a loop. When using LF as descriptor, the
Table 1: Number of database images, query images and
loops each dataset.
Database Query Loops
Dataset 1 183 24 34
Dataset 2 177 25 26
Dataset 3 244 24 26
Euclidean distance is computed by first flattening
LF into a 1D tensor. Deciding loop closings solely
with this information would require the existence of a
threshold δ so that I
i
and I
j
close a loop if and only
if ||D
i
− D
j
|| ≤ δ. Instead of using such threshold,
our proposal takes advantage of how loop closings are
used in visual SLAM.
Basically, when performing visual SLAM, the
most recent image is matched against all the previ-
ously gathered images. Our proposal is, thus, to se-
lect a subset of the previously gathered images as loop
candidates and confirm these loops in a posterior step.
The loop confirmation step is out of the scope of this
paper.
The whole process is divided in two steps. The
first step, called description, builds D
i
for all the
gathered images. We distinguish between D
t
, which
comes from the most recent image or query image,
and D
0:t−1
which come from the remaining images
or database images. Due to the incremental nature
of SLAM, the query image will become a database
image in further steps. Thus, our proposal only re-
quires computing D
t
, since D
0:t−1
are already com-
puted from previous steps.
Afterwards, the candidate selection process is per-
formed. During this step, the query image is com-
pared to all the database images by computing the
Euclidean distance between D
t
and all the D
0:t−1
.
The N database images leading to smaller Euclidean
distances are selected and constitute the set C
t
=
{C
0
, C
1
, C
N−1
} of loop candidates. That is, C
t
con-
tains the N images that are more likely to close a loop
with I
t
.
5 EXPERIMENTAL RESULTS
Three datasets of RGB images have been gathered in
coastal areas of Mallorca (Spain) using an AUV with
a bottom looking camera. Each dataset is divided in
two parts: database images and query images. There
are no loop closing images within each of these parts,
but each query image closes a loop with at least one
database image. The loop closings have been manu-
ally identified and constitute the ground truth. Table 1
shows the number of images and loop closings in each
dataset. All the images are resized to a resolution of
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
670
240x320x3
119x159x128
59x79x128
57x77x64
28x38x64
26x36x4
3744
512
1024
DS
conv3x3, 128
stride (2, 2)
maxpool3x3
stride (2, 2)
conv3x3, 64
stride (1, 1)
maxpool3x3
stride (2, 2)
conv3x3, 4
stride (1, 1)
flatten
dense
dense
dense
ENCODER DECODER
LF
LGID
(a) (b)
Figure 2: (a) The Neural Network architecture (b) The training process.
320×240 pixels prior to their use.
The two different NN outputs, namely LF and
LGID as shown in Figure 2-a, have been tested and
evaluated. Our proposal has been compared to the
Deep Loop Closure (DLC) approach by (Merril and
Huang, 2018) and to the direct use of the GID pro-
posed in Section 3. In this case, loop candidates
are obtained by directly computing distances between
GIDs without using the NN.
As for the DLC, the original algorithm has been
slightly modified to get better results in front of un-
derwater images and, thus, to provide a fair compari-
son. In particular, the DLC synthetic loop generation
has been changed to the same supervised approach
used with our methods so that it can be trained us-
ing exactly the same data than our proposal. Taking
into account that the DLC is also autoencoder based,
these changes make it possible to also test LF and
LGID. Let DLC-LF and DLC-LGID to refer to these
two cases.
The system has been trained, validated and tested
using all the valid combinations of the three datasets.
The only hyperparameter that has been tuned during
validation is the number of epochs. Let the notation
TxVySz denote a system trained with dataset x, vali-
dated with dataset y and tested with dataset z. Only
the combinations where x, y and z are different are
considered valid.
In order to evaluate the quality of the loop candi-
dates we proceeded as follows. For each query im-
age I
t
in each dataset the set of loop candidates C
t
has been computed using the two variations of our
approach (LGID and LF), the two variations of DLC
(DLC-LGID and DLC-LF) and GID as described be-
fore.
As an example, Figure 3 shows some of the can-
didate loops in each dataset. The first row shows
a query image of each dataset whilst the remaining
rows depict the first three candidates found by our
approach. In this example, the LF has been used to
select the candidates and, in each case, the NN was
Dataset 1 Dataset 2 Dataset 3
I
t
C
0
C
1
C
2
Figure 3: Examples of candidate loops in each dataset.
trained and validated using datasets other than the one
being tested. As it can be observed, actual loops are
within the candidate sets in all cases.
To quantify the quality of the loop candidates, the
number N of items in C
t
has been set to values ranging
from 1% to 100% of the number of database images
in the dataset. In each case the percentage of query
images for which at least one actual loop was in the
candidate set has been computed. Let this percentage
be referred to as the hit ratio.
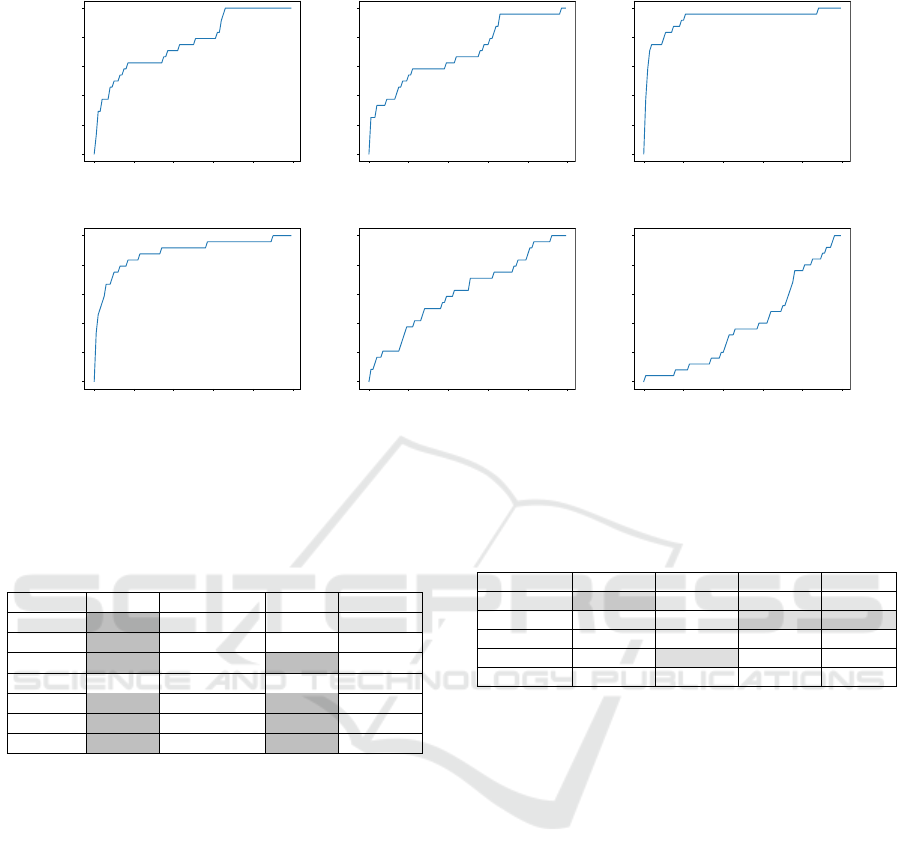
Figure 4 shows some of the obtained hit ratios as
a function of the percentage of database images used
to size C
t
. The labels in the examples corresponding
to our proposal and to DLC specify the training, vali-
dation and test sets using the aforementioned TxVySz
notation. The examples corresponding to GID do not
use that notation since GID is not trained nor vali-
dated, and thus only the tested dataset is specified as
Sx, x being the dataset number. Results using GID are
significantly worse than those using the deep learn-
ing approaches. This suggests that even though GID
Towards Visual Loop Detection in Underwater Robotics using a Deep Neural Network
671
0 20 40 60 80 100
Percentage of dat abase (%)
0
20
40
60
80
100
Hit ratio (%)
LGID-T3V2S1-AUC= 7 5.96%
0 20 40 60 80 100
Percentage of dat abase (%)
0
20
40
60
80
100
Hit ratio (%)
DLC- LGID-T3V2S1-AUC= 69.79%
0 20 40 60 80 100
Percentage of dat abase (%)
0
20
40
60
80
100
Hit ratio (%)
LF-T2V1S3 -AUC= 91 .83%
(a) (b) (c)
0 20 40 60 80 100
Percentage of dat abase (%)
0
20
40
60
80
100
Hit ratio (%)
DLC- LF-T2V1S3-AUC= 8 7.88%
0 20 40 60 80 100
Percentage of dat abase (%)
0
20
40
60
80
100
Hit ratio (%)
GID-S1-AUC= 61.17%
0 20 40 60 80 100
Percentage of database (%)
0
20
40
60
80
100
Hit ratio (%)
GID-S2-AUC= 39.00%
(d) (e) (f)
Figure 4: Examples of hit ratio evolution of (a) our proposal using LGID, (b) DLC using LGID, (c) our proposal using LF,
(d) DLC using LF, (e)-(f) direct use of GID.
Table 2: AUC values of our proposal for all the tested con-
figurations. The gray cells correspond to the cases in which
our approach surpasses DLC.
LGID DLC-LGID LF DLC-LF
T1V2S3 88.75% 88.08% 88.08% 90.46%
T1V3S2 83.60% 80.84% 86.16% 87.56%
T2V1S3 88.17% 86.54% 91.83% 87.88%
T2V3S1 73.58% 78.71% 73.79% 77.21%
T3V1S2 88.24% 84.60% 88.44% 87.56%
T3V2S1 75.96% 69.79% 75.88% 69.92%
Average 83.05% 81.43% 84.03% 83.43%
is not well suited to find loops, it is to provide useful
information to train a NN to achieve this goal.
Let us define the Area Under the Curve (AUC) as
the percentage of the whole space of possibilities be-
low the hit ratio curves. In the previous examples,
the AUC is shown on the top of each graph. Since
the hit ratio always increases with the size of the can-
didate set, approaches with large hit ratios for small
candidate sets will be responsible for large AUC val-
ues. Having large hit ratios within small candidate
sets means that the candidate set has been accurately
constructed. Accordingly, the AUC is a good way to
measure the quality of the candidate set.
Table 2 shows the AUC corresponding to our pro-
posal and to DLC for each valid combination of train-
ing, validation and testing. Overall, our proposal sur-
passes DLC in average, being the improvements more
clear when using LGID. Also, it can be observed that
LF, both using our proposal and DLC, leads to better
results than LGID. This suggests that the NN itself is
Table 3: AUC values of the tested approaches. The gray
cells emphasize the best result for each dataset.
Dataset 1 Dataset 2 Dataset 3 Average
LGID 75.77% 85.92% 88.46% 83.38%
LF 74.84% 87.30% 89.96% 84.03%
DLC-LGID 74.25% 82.72% 87.31% 81.43%
DLC-LF 73.57% 87.56% 89.17% 83.43%
GID 61.17% 39.00% 45.75% 48.64%
more important than the specific GID used to train it.
By aggregating the previous results per dataset, it
is possible to compare them to the AUC correspond-
ing to the direct use of the GID. Table 3 summarizes
these results. As it can be observed, LF is the best
method in average and the GID alone leads to poor
results, thus being useless to search loops by itself.
6 CONCLUSION AND FUTURE
WORK
This paper constitutes a first step towards the use of
Deep Neural Networks to fast and robustly detect un-
derwater visual loops. The proposed approach fol-
lows the structure of an autoencoder and replaces
the decoder by a set of fully connected layers. This
change makes it possible to use a global image de-
scriptor, built upon clusters of local SIFT features, to
guide the training process.
Once trained, the NN builds two different de-
scriptors of the input image. One of these descrip-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
672

tors, called LF, is the encoder output whilst the other,
called LGID, is the decoder output. Both descriptors
can be compared among different images to decide
if they are likely to close a loop. The experimental
results show the ability of the presented approach to
detect loop candidates and compare favourably to a
previously existing method.
Since our proposal has shown to be trainable with
a small set of images and the architecture is simple
enough to provide on-line sets of loop candidates,
it constitutes a promising approach to be embedded
into a full underwater visual SLAM system. Even
though it cannot replace a full SLAM loop closing
layer, since it does not compute the relative motion
between images, it can strongly reduce the compu-
tational load of such module by feeding it only with
images that most likely will close a loop.
Accordingly, our lines of future research are as
follows. First, we are now working on a strategy
to confirm or deny the loop candidates as well as to
compute the relative motion between the confirmed
loops. In this way, our proposal could be embedded
into a full SLAM system. Second, even though small
datasets have shown to be sufficient to reach good
results, larger datasets would probably lead to better
candidate sets. For this reason, we are also working
on a method to synthetically generate loops from un-
derwater imagery. This would constitute a weakly su-
pervised approach and would allow training the NN
with arbitrarily large datasets. Our final goal would
be to integrate the whole loop detection not only into
a SLAM system but also into a Multi-Session SLAM
system, which will definitely prove the ability of our
proposal to detect loops in a really challenging sce-
nario.
ACKNOWLEDGEMENTS
This work is partially supported by the Spanish Min-
istry of Economy and Competitiveness under contract
DPI2017-86372-C3-3-R (AEI,FEDER,UE).
REFERENCES
Arandjelovic, R., Gronat, P., Torii, A., Pajdla, T., and
Sivic, J. (2018). NetVLAD: CNN Architecture for
Weakly Supervised Place Recognition. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
40(6):1437–1451.
Bonin-Font, F., Burguera, A., and Oliver, G. (2013). New
solutions in underwater imaging and vision systems.
In Imaging Marine Life: Macrophotography and Mi-
croscopy Approaches for Marine Biology, pages 23–
47.
Burguera, A. and Bonin-Font, F. (2019). A trajectory-based
approach to multi-session underwater visual slam us-
ing global image signatures. MDPI Journal of Marine
Science and Engineering, 7(8).
Burguera, A., Bonin-Font, F., and Oliver, G. (2015).
Trajectory-based visual localization in underwa-
ter surveying missions. Sensors (Switzerland),
15(1):1708–1735.
Ciarfuglia, T. A., Costante, G., Valigi, P., and Ricci, E.
(2012). A discriminative approach for appearance
based loop closing. In IEEE International Conference
on Intelligent Robots and Systems, pages 3837–3843.
Durrant-Whyte, H. and Bailey, T. (2006). Simultaneous lo-
calization and mapping (SLAM): part I The Essential
Algorithms. Robotics & Automation Magazine, 2:99–
110.
Jaakkola, T. S. and Haussler, D. (1999). Exploiting gener-
ative models in discriminative classifiers. In Proceed-
ings of the Conference on Advances in Neural Infor-
mation Processing Systems, pages 487—-493.
J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010).
Aggregating local descriptors into a compact image
representation. In Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 3304–3311.
Kingma, D. P. and Welling, M. (2014). Auto-Encoding
Variational Bayes (VAE, reparameterization trick).
ICLR 2014, (Ml):1–14.
Merril, N. and Huang, G. (2018). Lightweight Unsuper-
vised Deep Loop Closure. In Robotics: Science and
Systems.
Mur-Artal, R. and Tardos, J. D. (2017). ORB-SLAM2:
An Open-Source SLAM System for Monocular,
Stereo, and RGB-D Cameras. IEEE Transactions on
Robotics, 33(5):1255–1262.
Negre-Carrasco, P. L., Bonin-Font, F., and Oliver-Codina,
G. (2016). Global image signature for visual loop-
closure detection. Autonomous Robots, 40(8):1403–
1417.
Perronnin, F. and Dance, C. (2007). Fisher kernels on visual
vocabularies for image categorization. In Proceedings
of the IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition.
Rezende, D. J., Mohamed, S., and Wierstra, D. (2014).
Stochastic Back-propagation and Variational Infer-
ence in Deep Latent Gaussian Models. Proceedings
of The 31st . . . , 32:1278–1286.
Taketomi, T., Uchiyama, H., and Ikeda, S. (2017). Visual
SLAM algorithms: a survey from 2010 to 2016. IPSJ
Transactions on Computer Vision and Applications,
9(1).
Towards Visual Loop Detection in Underwater Robotics using a Deep Neural Network
673
