
Transfer Learning from Synthetic Data
in the Camera Pose Estimation Problem
Jorge L. Charco
1,2
, Angel D. Sappa
1,3
, Boris X. Vintimilla
1
and Henry O. Velesaca
1
1
ESPOL Polytechnic University, Escuela Superior Polit
´
ecnica del Litoral, ESPOL,
Campus Gustavo Galindo Km. 30.5 V
´
ıa Perimetral, P.O. Box 09-01-5863, Guayaquil, Ecuador
2
Universidad de Guayaquil, Delta and Kennedy Av., P.B. EC090514, Guayaquil, Ecuador
3
Computer Vision Center, Edifici O, Campus UAB, 08193 Bellaterra, Barcelona, Spain
Keywords:
Relative Camera Pose Estimation, Siamese Architecture, Synthetic Data, Deep Learning, Multi-view
Environments, Extrinsic Camera Parameters.
Abstract:
This paper presents a novel Siamese network architecture, as a variant of Resnet-50, to estimate the rela-
tive camera pose on multi-view environments. In order to improve the performance of the proposed model
a transfer learning strategy, based on synthetic images obtained from a virtual-world, is considered. The
transfer learning consists of first training the network using pairs of images from the virtual-world scenario
considering different conditions (i.e., weather, illumination, objects, buildings, etc.); then, the learned weight
of the network are transferred to the real case, where images from real-world scenarios are considered. Ex-
perimental results and comparisons with the state of the art show both, improvements on the relative pose
estimation accuracy using the proposed model, as well as further improvements when the transfer learning
strategy (synthetic-world data transfer learning real-world data) is considered to tackle the limitation on the
training due to the reduced number of pairs of real-images on most of the public data sets.
1 INTRODUCTION
Automatic calibration of the camera extrinsic parame-
ters is a challenging problem involved in several com-
puter vision processes; applications such as driving
assistance, human pose estimation, mobile robots, 3D
object reconstruction, just to mention a few, would
take advantage of knowing the relative pose between
the camera and world reference system. During last
decades different computer vision algorithms have
been proposed for extrinsic camera parameters esti-
mation (relative translation and rotation) (e.g., (Hart-
ley, 1994),(Sappa et al., 2006), (Liu et al., 2009),
(Dornaika et al., 2011), (Schonberger and Frahm,
2016), (Iyer et al., 2018), (Lin et al., 2019)).
Classical approaches estimate the extrinsic cam-
era parameters from feature points (e.g., SIFT (Lowe,
1999), SURF (Bay et al., 2006), BRIEF (Calonder
et al., 2012)), which are detected and described in
the pair of images used to estimate the pose (relative
translation and rotation) between the cameras. Theses
algorithms have low accuracy when they are unable to
find enough common feature points to be matched.
During last years, convolutional neural networks
(CNNs) have been widely used for feature detection
in tasks such as segmentation, images classification,
super resolution and pattern recognition, getting bet-
ter results than state-of-art (e.g., (Kamnitsas et al.,
2017), (Wang et al., 2016), (Rivadeneira et al., 2019)).
Within this scheme, different CNN based camera cali-
brations, on single and multi-view environments, have
been also proposed showing appealing results (e.g.,
(Shalnov and Konushin, 2017), (Charco et al., 2018)).
The single view approaches capture real-world envi-
ronments by using a single camera that is constantly
moving around the scene that may contains dynamic
objects (i.e., pedestrians, cars). The challenge with
these approaches lie on the scenarios with moving
objects, which change their position during the ac-
quisition and could occlude different scene’s regions
(features) at consecutive frames. This problem is not
present in multi-view approaches, due to the fact that
the scene is simultaneously captured from different
positions by different cameras, considering a mini-
mum overlap of regions between the captured scenes.
Although appealing results are obtained with
learning based approaches, they have as a main lim-
itation the size of data set used for training the net-
498
Charco, J., Sappa, A., Vintimilla, B. and Velesaca, H.
Transfer Learning from Synthetic Data in the Camera Pose Estimation Problem.
DOI: 10.5220/0009167604980505
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
498-505
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

work, which becomes an important factor. In the par-
ticular case of extrinsic camera parameter estimation,
there are several data sets devoted for this task. Ac-
tually, some of them have been proposed for appli-
cations such as mapping, tracking or relocalization
(e.g., Cambridge (Kendall et al., 2015) and 7-Scene
(Shotton et al., 2013)). Unfortunately, most of these
data sets contain just a small number of images ac-
quired by single view approaches. Trying to over-
come this limitation, in (Aanæs et al., 2016), the au-
thors have provided a multi-view data set, acquired
using a robotic arm, called DTU-Robot. Main draw-
back with this data set lies on the fact that an indoor
and small scenario, containing few objects, has been
considered; transferring knowledge from this scenario
to real outdoor environments becomes a difficult task.
As mentioned above, the limited size of data sets
is a common problem in learning-based solutions. In
some cases this problem has been overcome by us-
ing virtual environments where data sets are acquired
(e.g., 3D object recognition (Jalal et al., 2019), op-
tical flow estimation (Onkarappa and Sappa, 2015)).
These virtual environments allow generating an al-
most unlimited set of synthetic images by rendered
many times with different conditions and actors (i.e.,
weather, illumination, pedestrian, road, building, ve-
hicles). Another appealing feature of synthetic data
sets is related with the lack of manual ground truth
annotations required in these scenarios.
In the current work, a CNN architecture is pro-
posed to estimate extrinsic camera parameters by us-
ing pairs of images acquired from the same scene and
from different points of view at the same time. This
architecture is firstly trained using synthetic images
generated in a virtual world (i.e., a 3D representation
of an urban environment containing a lot of buildings
and different objects) and then its weights updated
using a transfer learning strategy using real data. A
Siamese network architecture is proposed as a variant
of Resnet-50. The remainder of the paper is organized
as follows. In Section 2 previous works are summa-
rized; then, in Section 3 the proposed approach is de-
tailed together with a description of the used synthetic
data sets. Experimental results are reported in Section
4 and comparisons with a previous approach are also
presented. Finally, conclusions and future work are
given in Section 5.
2 RELATED WORK
During the last years, CNNs models have been used in
many computer vision tasks due to their capability to
extract features improving state-of-art results. In that
direction, some works have been proposed for camera
pose estimation from a single view approach. The au-
thors in (Kendall et al., 2015) have proposed a CNN
architecture to regress the 6-DOF camera pose from
a single RGB image, being robust to indoors and out-
doors environments in real time, even difficult light-
ing, motion blur and different camera intrinsics pa-
rameters. The previous approach was updated with a
similar architecture and a new loss function to learn
camera pose in (Kendall and Cipolla, 2017). In (Shal-
nov and Konushin, 2017) the authors have proposed a
novel method for camera pose estimation based on the
scene’s prior-knowledge. The approach is trained on a
synthetic scenario where the camera pose is estimated
based on human body features. The trained network
is then generalized to real environments. On the con-
trary to previous approaches, in (Iyer et al., 2018) a
self-supervised deep network is proposed to estimate
the 6-DOF, rigid body transformation, between a 3D
LiDAR and a 2D camera in real-time. The approach
is then used to estimate the calibration parameters.
Just few works have been proposed to solve the
camera pose estimation problem in multi-view envi-
ronments using CNNs. In (Charco et al., 2018), the
authors have proposed to use a Siamese CNN based
on a modified AlexNet architecture with two identi-
cal branches and shared weights. The training pro-
cess was performed from scratch with a set of pairs
of images of the same scene simultaneously acquired
from different points of view. The output of each
branch is concatenated to two fully connected lay-
ers to estimate the relative camera pose (translation
and rotation). Euclidean distance is used as a loss
function. In (En et al., 2018) the authors have also
proposed a Siamese Network with two branches re-
gressing one pose per image. GoogLeNet architec-
ture is used to extract features and the pose regres-
sor contains two fully connected layers with ReLU
activation. The quaternion is normalized during test
time. Euclidean distance and weighting term (β) are
used to balance the error between translation and ro-
tation. The authors in (Lin et al., 2019) have pre-
sented an approach based on Recurrent Convolutional
Neural Networks (RCNNs). They used the first four
residual blocks of the ResNet-50. The output of each
consecutive monocular image is concatenated to fed
the last block of the ResNet-50. Two RCNNs are
used, the first is fed by the concatenated output of two
consecutive images to two Long Short-Term Mem-
ory (LSTM) to find the correlations among images.
The second RCNN is fed from a monocular image to
LSTM and its output is reshaped to a fully connected
layer. Finally, both outputs are concatenated to obtain
the translation and rotation estimation.
Transfer Learning from Synthetic Data in the Camera Pose Estimation Problem
499
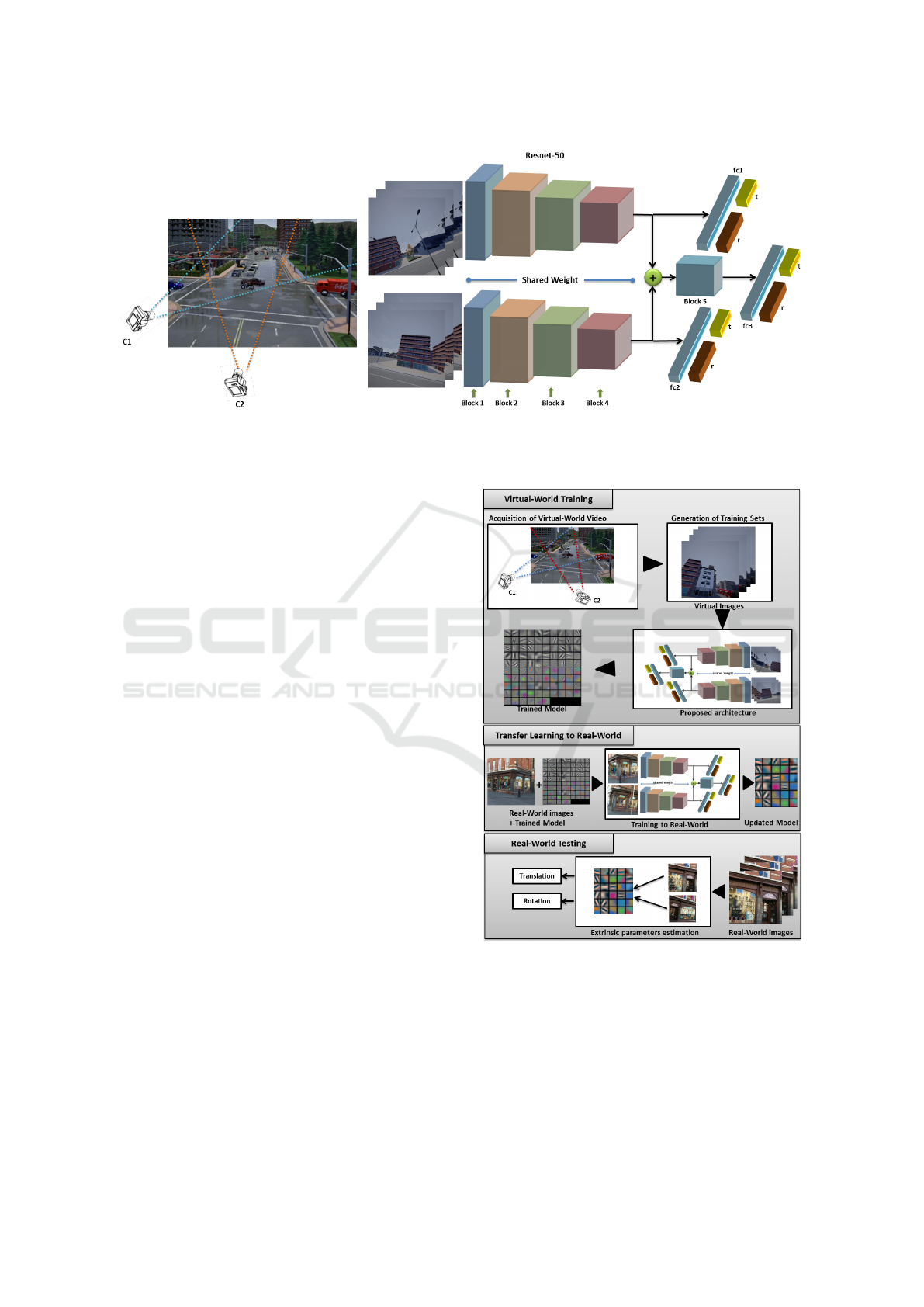
Figure 1: Siamese architecture feds with two images of the same scene captured at the same time from different points of
views. The regression part contains three fully-connected layers to estimate the extrinsic camera parameters.
3 PROPOSED APPROACH
This section details the two main contributions of cur-
rent work. Firstly, the Siamese network architecture
proposed to estimate the relative pose between two
cameras, which synchronously acquire images of the
same scenario, is presented. The network takes as
an input a pair of images of the same scenario, cap-
tured from different points of view (position and ro-
tation) (see Fig. 1) and estimate the relative rotation
and translation between the cameras. As mentioned
above, the second contribution of current work lies on
the strategy used to train the network. This strategy
consists of training the proposed network using a syn-
thetic data set (outdoor environments acquired by us-
ing CARLA simulator (Dosovitskiy et al., 2017)) and
then transferring the knowledge of trained network in
virtual environment to a real-world. The proposed
transfer learning based strategy tackles the problem
of having a large data set for the training process.
3.1 Network Architecture
The proposed approach is a modified Resnet-50 (He
et al., 2016), which contains two identical branches
with shared weights up to the fourth residual block.
The last residual (fifth block) is fed by concatenat-
ing the output of the fourth residual block from each
branch. The architecture is composed with multi-
ple residual units, bottleneck architecture consisting
of convolutional layers, batch normalization, pool-
ing and identity blocks. The standard residual block
structure was modified by replacing RELUs with
ELUs as activation function. According to (Clevert
et al., 2015) ELU helps to speed up convergence and
Figure 2: Training and testing processes.
to reduce the bias shift neurons, avoiding the vanish-
ing gradient. Furthermore, the last average pooling
layer is replaced with a global average pooling layer.
Two fully connected layers are added after the fourth
residual blocks for each branch (left and right), fc1
and fc2, and after the fifth residual block an addi-
tional fully connected layer is also added fc3. The
global pose of each camera is predicted from the fea-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
500

tures extracted from the corresponding image, up to
fourth residual block, which are used to feed the fc1
or fc2. Each f c
i
has a dimension of 1024 followed
by two regressors, corresponding to the global trans-
lation (3×1) and rotation (4×1) respectively. Regard-
ing the relative camera pose, the output of the last
residual block (fifth block) is used to feed fc3 and sub-
sequently the two regressors used to estimate the rela-
tive translation (3×1) and rotation (4×1) between the
given pair of images.
Relative camera pose is represented by two vec-
tors: ∆p = [
ˆ
t, ˆr], where
ˆ
t is a 3-dimensions vector that
represents the translation and ˆr is a 4-dimensions vec-
tor that represents the rotation (i.e., a quaternion). As
the image comes in the same context is reasonable
to build one model to train both components (trans-
lation and rotation) at the same time. Normally, the
Euclidean distance is used to estimate them:
T
Global
(I) =
t −
b
t
γ
, (1)
R
Global
(I) =
r −
b
r
k
b
r
k
γ
, (2)
where t represents the ground truth translation and
b
t
denotes the prediction. r is the ground truth rotation
and
b
r denotes the prediction of the quaternion values.
The estimated rotation (i.e., the estimated quaternioin
values) is normalized to a unit length as
b
r
k
b
r
k
. γ is L2
Euclidean norm. The previous terms are merged ac-
cording to a factor β, which is introduced due to the
difference in scale between both components (trans-
lation and rotation) to balance the loss terms (Kendall
et al., 2015). Hence, the general loss function, that
includes both terms, is defined as:
Loss
global
(I) = T
Global
+ β ∗ R
Global
, (3)
setting the β parameter to the right value is a challeng-
ing task that depends on several factors related to the
scene and cameras. In order to find the best solution
(Kendall and Cipolla, 2017) propose to use two learn-
able variables called
b
s
x
and
b
s
y
that acts as weight to
balance translation and rotation terms—with a simi-
lar effect to β. In the current work, a modified loss
function that uses
b
s
y
as learnable variable is used:
Loss
Global
(I) = T
Global
+(exp(
b
s
y
)∗R
Global
+
b
s
y
). (4)
Each branch of the Siamese architecture esti-
mates the global pose of the image. Additionally, by
connecting these branches together through the fifth
block the relative pose between the cameras is esti-
mated; this relative pose is obtained as follow:
T
Relative
(I) =
t
rel
−
b
t
rel
γ
, (5)
R
Relative
(I) =
r
rel
−
b
r
rel
k
b
r
rel
k
γ
, (6)
where T
Relative
and R
Relative
estimate the difference be-
tween the ground truth (i.e., the relative one) and the
prediction of trained model (
b
t
rel
and
b
r
rel
). As
b
r
rel
is di-
rectly obtained from network it has to be normalized
before. Equation (7) and Eq. (8) show how to obtain
t
rel
and r
rel
.
t
rel
= t
C1
−t
C2
, (7)
r
rel
= r
∗
C2
∗ r
C1
, (8)
where Ci corresponds to the pose parameters of the
(i) camera (i.e., rotation and translation) given by the
CARLA simulator; these parameters are referred to a
global reference system; r
∗
C2
is the conjugate quater-
nion of r
C2
. Normalize the quaternion is an important
process before using Eq. (8). Finally, the loss func-
tion used to obtain the relative pose is:
Loss
Relative
(I) = T
Rel
+ (exp(
b
s
y
) ∗ R
Rel
+
b
s
y
). (9)
Note that Loss
Global
in Eq. (4) and Loss
Relative
in
Eq. (9) are applied for different purposes. The first
one is used to predict global pose through each branch
of the trained model. While the second predicts the
relative pose by concatenating the Siamese Network
(see Fig. 1). The proposed approach was jointly
trained with Global and Relative Loss, as shown in
Eq. (10):
L = Loss
Global
+ Loss
Relative
. (10)
3.2 Synthetic Data Set
This section presents the steps followed for the syn-
thetic data set generation. Two open-source software
tools were used: CARLA Simulator (Dosovitskiy
et al., 2017) and OpenMVG (Moulon et al., 2016).
This first one, CARLA, is used for generating syn-
thetic images from a virtual-world. It has been de-
veloped from the ground up to support the develop-
ment, training, and validation of autonomous urban
driving systems. The second open-source software
(OpenMVG) has been used to estimate the overlap be-
tween a given pair of images. It is designed to provide
easy access to the classical problem solvers in multi-
ple view geometry and solve them accurately.
A workstation with a Titan XP GPU was used
for server execution due to the large amount of pro-
cessing demanded by the CARLA simulator. The at-
tributes and values used to configure the cameras in
CARLA simulator are as follow: image size x = 448,
image size y=448, sensor tick & 1.0, FOV = 100.
Transfer Learning from Synthetic Data in the Camera Pose Estimation Problem
501
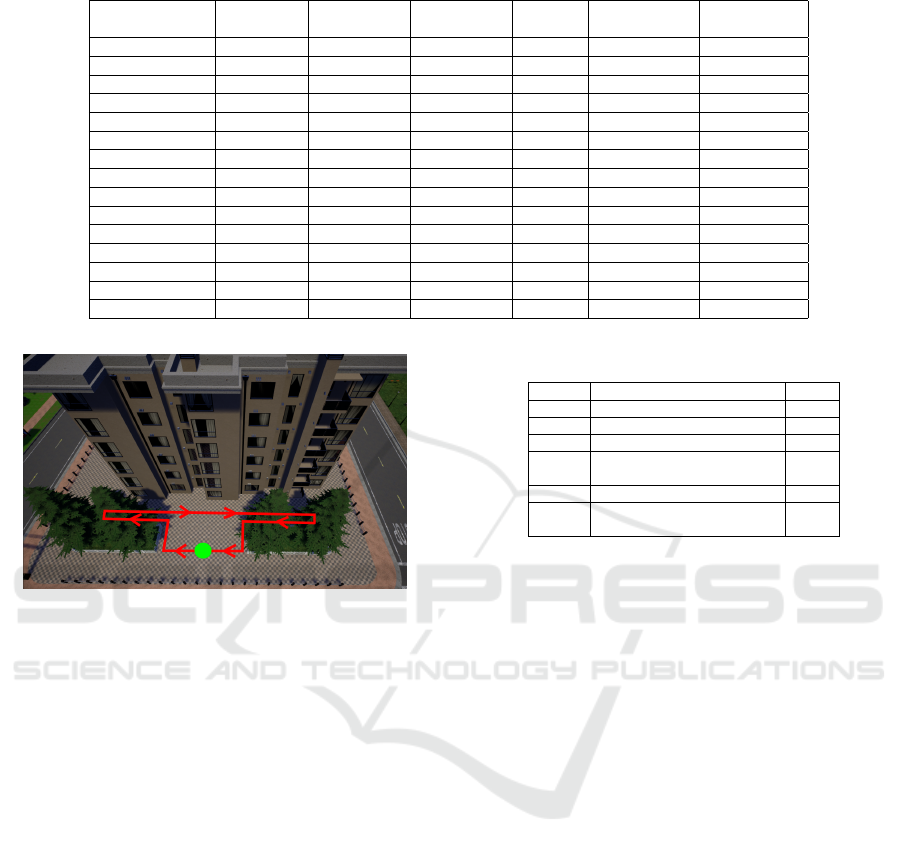
Table 1: Attributes and values for the selected weathers.
Weather Cloudyness Precipitation Precipitation Wind Sun Sun
deposits intensity azimuth (ang.) altitude (ang.)
Custom weather 0 0 0 0.00 -90 60
Clear noon 15 0 0 0.35 0 75
Cloudy noon 80 0 0 0.35 0 75
Wet noon 20 0 50 0.35 0 75
Wet cloudy noon 80 0 50 0.35 0 75
Mid rainy noon 80 30 50 0.40 0 75
Hard rainy noon 90 60 100 1.00 0 75
Soft rain noon 70 15 50 0.35 0 75
Clear sunset 15 0 0 0.35 0 15
Cloudy sunset 80 0 0 0.35 0 15
Wet sunset 20 0 50 0.35 0 15
Wet cloudy sunset 90 0 50 0.35 0 15
Mid rain sunset 80 30 50 0.40 0 15
Hard rain sunset 80 60 100 1.00 0 15
Soft rain sunset 90 15 50 0.35 0 15
Figure 3: Trajectory followed by the camera in CARLA
Simulator.
The cameras were attached to moving platform to al-
low navigation through the virtual-world. Fifteen dif-
ferent types of weathers are used to generate the set
of pairs of images. All selected weather and their re-
spective parameter settings are shown in Table 1.
The trajectory followed by the cameras is shown
in Fig 3. It starts from the green point and moves
to left following the arrows until it ends at the same
green point where it starts. The pair of cameras
follow the aforementioned path while their relative
pose (relative position and orientation between them)
randomly changes at each time in the range x =
[−0.5, 0.5], y = [−0.5, 0.5], and z = [−0.5, 0.5], while
their relative orientation changes in the range roll =
[0, 12], pitch = [−5, 5], and yaw = [−5, 5] degrees,
these values were defined according to the scene and
building characteristics. Values outside these ranges
generate a pair of images with little overlap.
OpenMVG is then used to obtain the list of pairs
of images with an overlap higher than a give thresh-
old. The configuration options of OpenMVG has been
set as presented in Table 2. The ground truth for the
global camera pose has been obtained from CARLA
simulator, while the relative camera pose is computed
from Eq. (7) and Eq. (8).
Table 2: Options available for OpenMVG script.
Order
Option
Used
1
Intrinsics analysis
Yes
2
Compute features
Yes
3
Compute matches
Yes
4
Do Incremental/Sequential re-
construction
No
5
Colorize Structure
No
6
Structure from Known Poses
(robust triangulation)
No
4 EXPERIMENTS RESULTS
As mentioned above, this paper has two main con-
tributions. On the one hand, a new CNN based ar-
chitecture is proposed for extrinsic camera parame-
ter estimation; on the other hand, trying to overcome
limitations related with the reduced amount of data
provided in most of public data sets a transfer learn-
ing strategy is proposed. This strategy is based on the
usage of synthetic data generated using CARLA sim-
ulator (Dosovitskiy et al., 2017). Hence, this section
first presents details on the data set generation; then,
experimental results by training the proposed archi-
tecture with the ShopFacade and OldHospital of Cam-
bridge data set (Kendall et al., 2015) are depicted; and
finally, results obtained when the proposed transfer
learning strategy is used (i.e., first training the net-
work on the synthetic data and then updating network
weights by keep training it with real data).
The proposed approach was implemented with the
TensorFlow and trained with NVIDIA Titan XP GPU
and Intel Core I9 3.3GHz CPU. Adam optimizer is
used to train the network with a learning rate of 10
−4
and batch size of 32. The
b
s
y
is initialized with -6.0 in
all the experiments.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
502

Figure 4: (1st row) Images from the synthetic image data set generated by the CARLA simulator (they were captured at
different weather and lighting conditions. (2nd and 3rd row) Real-world images, ShopFacade and OldHospital of Cambridge
data set respectively, used to evaluate the trained model.
4.1 Training on Real Data
Using the strategy of transfer learning, all layers were
initialized up to the fourth residual block with the
weights of Resnet-50 pretrained on ImageNet and the
normal distribution initialization was used for the re-
maining layers. The network architecture was trained
on ShopFacade and OldHospital of Cambridge data
set. As pre-processing data set, the images were re-
sized to 224 pixels along the shorter side; then, the
mean value was computed and subtracted from the
images. For the training process, random crops of
224×224 pixels have been computed on the OldHos-
pital data set; this results in a set of 5900 pairs of im-
ages, which were used to fed to the network. The
same process has been performed at 1300 pairs of im-
ages of ShopFacade data set. Both data set were used
to trained the network until 500 epochs, which ap-
proximately took 7 hours and 3 hours respectively.
The pre-processing mentioned above has been
also used during the evaluation phase. In the evalua-
tion a set of 2100 pairs of images from the OldHospi-
tal and a set of 250 pairs of images from ShopFacade
have been considered. On the contrary to the training
stage, in this case a central crop is used instead of a
random crop. Since the relationship between the pair
of images is required for the training stage, both the
relative and the absolute pose were estimated.
4.2 Transfer Learning Strategy
This section presents details on the strategy followed
for transferring the parameters learned in a synthetic
data set to real images. The proposed architecture
was initialized as presented in Section 4.1. In this
case the training process was performed on the syn-
thetic data set described in Section 3.2. Since the size
of synthetic images is 448×448 pixels, a resize up
to 224×224 pixels is performed; like in the previous
case, the average mean value is estimated and sub-
tracted from each image. The synthetic data set con-
tains 23384 pairs of images. The training stage took
about 5 hours with 300 epochs. After the training pro-
cess from the synthetic images, learned weights were
used to initialize all layers of proposed architecture,
which is retrained and refined in an end-to-end way
with real-world images (Fig. 4 shows illustrations of
images used during the training and transfer learning
processes).
4.3 Results
Experimental results obtained with the proposed net-
work and training strategy are presented. Addition-
ally, the obtained results are compared with a state-of-
the-art CNN-based method Pose-MV (Charco et al.,
2018) on ShopFacade and OldHospital of Cambridge
data sets. Average median error on rotation and trans-
lation for both data sets are depicted on Table 3. An-
Transfer Learning from Synthetic Data in the Camera Pose Estimation Problem
503

Table 3: Comparison of average median Relative Pose Errors (extrinsic parameters) of RelPoseTL with respect to Pose-MV
on ShopFacade and OldHospital of Cambridge data set.
State-of-the-art RelPoseTL (Ours experiments)
Scene / Models
Pose-MV Real data
Sythentic data
(Transfer Learning)
ShopFacade 1.126m, 6.021 1,002m, 3.655 0.834m, 3.182
OldHospital 5.849m, 7.546 3.792m, 2.721 3.705m, 2.583
Average 3.487m, 6.783 2.397m, 3.188 2.269m, 2.882
Figure 5: Challenging scenarios, pairs of images from
points of view with large relative rotation and translation,
as well as moving objects.
gular error and Euclidean distance error are used to
evaluate the performance of the proposed approach.
The first one is used to compute the rotation error be-
tween the obtained result and the given ground truth
value using the 4-dimensional vector (quaternion).
The second one is used to measure the distance error
between the estimated translation and the correspond-
ing ground truth (3-dimensional translation vector).
The proposed approach obtains more accurate results
on both translation and rotation in both data sets.
The average median translation error obtained by Rel-
PoseTL(Real Data) improves the results of Pose-MV
in about 32% (both approaches trained with the same
real date); this improvements reaches up to 35% when
the proposed transfer learning strategy is considered.
With respect to average median rotation error, Rel-
PoseTL (Real Data) improves by 53% the results ob-
tained with Pose-MV; this improvements reaches up
to the 58% when the proposed transfer learning strat-
egy is considered. Large errors are generated by chal-
lenging scenarios such as those presented in Fig. 5.
5 CONCLUSIONS
This paper addresses the challenging problem of es-
timating the relative camera pose from two different
images of the same scenario, acquired from two dif-
ferent points of view at the same time. A novel deep
learning based architecture is proposed to accurately
estimate the relative rotation and translation between
the two cameras. Experimental results and compar-
isons are provided showing improvements on the ob-
tained results. As a second contribution of this pa-
per a training strategy based on transfer learning from
Synthetic data is proposed. This strategy is moti-
vated by the reduced amount of images on the data
sets provided to train the network. The manuscript
shows how features extracted from large amounts of
synthetic images can help the estimation of relative
camera pose in real-world images. The proposed ar-
chitecture has been trained both, by only using real
images and by using the proposed transfer learning
strategy. Experimental results show that the proposed
transfer learning approach helps to reduce error in the
obtained results (relative rotation and translation). Fu-
ture work will be focused on extending the usage the
synthetic images data set, by increasing the data set
with others outdoor multi-view environments, includ-
ing different virtual simulators. The goal of this fu-
ture work is to reach the state-of-the-art results with-
out using a transfer learning strategy, in other words
by training the network just with synthetic scenarios.
Additionally, different models based on CNNs will be
considered.
ACKNOWLEDGEMENTS
This work has been partially supported by the ES-
POL projects EPASI (CIDIS-01-2018) and TICs4CI
(FIEC-16-2018); the Spanish Government under
Project TIN2017-89723-P; and the CERCA Pro-
gramme/Generalitat de Catalunya”. The authors ac-
knowledge the support of CYTED Network: “Ibero-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
504

American Thematic Network on ICT Applications for
Smart Cities” (REF-518RT0559) and the NVIDIA
Corporation for the donation of the Titan Xp GPU.
The first author has been supported by Ecuador gov-
ernment under a SENESCYT scholarship contract
CZ05-000040-2018.
REFERENCES
Aanæs, H., Jensen, R. R., Vogiatzis, G., Tola, E., and Dahl,
A. B. (2016). Large-scale data for multiple-view stere-
opsis. International Journal of Computer Vision.
Bay, H., Tuytelaars, T., and Gool, L. J. V. (2006). SURF:
Speeded Up Robust Features. In Proceedings of the
9th European Conference on Computer Vision, Graz,
Austria, May 7-13, pages 404–417.
Calonder, M., Lepetit, V.,
¨
Ozuysal, M., Trzcinski, T.,
Strecha, C., and Fua, P. (2012). BRIEF: Computing
a local binary descriptor very fast. IEEE Trans. Pat-
tern Anal. Mach. Intell., 34(7):1281–1298.
Charco, J. L., Vintimilla, B. X., and Sappa, A. D. (2018).
Deep learning based camera pose estimation in multi-
view environment. In 2018 14th International Confer-
ence on Signal-Image Technology & Internet-Based
Systems (SITIS), pages 224–228. IEEE.
Clevert, D.-A., Unterthiner, T., and Hochreiter, S.
(2015). Fast and accurate deep network learning
by exponential linear units (elus). arXiv preprint
arXiv:1511.07289.
Dornaika, F.,
´
Alvarez, J. M., Sappa, A. D., and L
´
opez,
A. M. (2011). A new framework for stereo sen-
sor pose through road segmentation and registration.
IEEE Transactions on Intelligent Transportation Sys-
tems, 12(4):954–966.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
En, S., Lechervy, A., and Jurie, F. (2018). Rpnet: an end-
to-end network for relative camera pose estimation.
In Proceedings of the European Conference on Com-
puter Vision (ECCV).
Hartley, R. I. (1994). Self-calibration from multiple views
with a rotating camera. In European Conference on
Computer Vision, pages 471–478. Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Iyer, G., Ram, R. K., Murthy, J. K., and Krishna, K. M.
(2018). Calibnet: Geometrically supervised extrinsic
calibration using 3d spatial transformer networks. In
2018 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS). IEEE.
Jalal, M., Spjut, J., Boudaoud, B., and Betke, M. (2019).
Sidod: A synthetic image dataset for 3d object pose
recognition with distractors. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition Workshops, pages 0–0.
Kamnitsas, K., Ledig, C., Newcombe, V. F., Simpson,
J. P., Kane, A. D., Menon, D. K., Rueckert, D., and
Glocker, B. (2017). Efficient multi-scale 3d cnn with
fully connected crf for accurate brain lesion segmen-
tation. Medical image analysis, 36:61–78.
Kendall, A. and Cipolla, R. (2017). Geometric loss func-
tions for camera pose regression with deep learning.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 5974–5983.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet: A
convolutional network for real-time 6-dof camera re-
localization. In Proceedings of the IEEE international
conference on computer vision, pages 2938–2946.
Lin, Y., Liu, Z., Huang, J., Wang, C., Du, G., Bai, J., and
Lian, S. (2019). Deep global-relative networks for
end-to-end 6-dof visual localization and odometry. In
Pacific Rim International Conference on Artificial In-
telligence, pages 454–467. Springer.
Liu, R., Zhang, H., Liu, M., Xia, X., and Hu, T. (2009).
Stereo cameras self-calibration based on sift. In 2009
International Conference on Measuring Technology
and Mechatronics Automation, volume 1.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the IEEE In-
ternational Conference on Computer Vision, Kerkyra,
Greece, September 20-27, pages 1150–1157.
Moulon, P., Monasse, P., Marlet, R., and Others (2016).
Openmvg. an open multiple view geometry library.
https://github.com/openMVG/openMVG.
Onkarappa, N. and Sappa, A. D. (2015). Synthetic se-
quences and ground-truth flow field generation for al-
gorithm validation. Multimedia Tools and Applica-
tions, 74(9):3121–3135.
Rivadeneira, R. E., Su
´
arez, P. L., Sappa, A. D., and Vin-
timilla, B. X. (2019). Thermal image superresolution
through deep convolutional neural network. In Inter-
national Conference on Image Analysis and Recogni-
tion, pages 417–426. Springer.
Sappa, A., Ger
´
onimo, D., Dornaika, F., and L
´
opez, A.
(2006). On-board camera extrinsic parameter estima-
tion. Electronics Letters, 42(13):745–747.
Schonberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 4104–4113.
Shalnov, E. and Konushin, A. (2017). Convolutional neural
network for camera pose estimation from object detec-
tions. International Archives of the Photogrammetry,
Remote Sensing & Spatial Information Sciences, 42.
Shotton, J., Glocker, B., Zach, C., Izadi, S., Criminisi, A.,
and Fitzgibbon, A. (2013). Scene coordinate regres-
sion forests for camera relocalization in rgb-d images.
In 2013 IEEE Conference on Computer Vision and
Pattern Recognition, pages 2930–2937.
Wang, J., Yang, Y., Mao, J., Huang, Z., Huang, C., and Xu,
W. (2016). Cnn-rnn: A unified framework for multi-
label image classification. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 2285–2294.
Transfer Learning from Synthetic Data in the Camera Pose Estimation Problem
505
