
Objects Detection from Digitized Herbarium Specimen based on
Improved YOLO V3
Abdelaziz Triki
1
, Bassem Bouaziz
1
, Walid Mahdi
1,2
and Jitendra Gaikwad
3
1
MIRACL/CRNS, University of Sfax, Sfax, Tunisia
2
College of Computers and Information Technology, Taif University, Saudi Arabia
3
Friedrich Schiller University Jena, German Centre for Integrative Biodiversity Research (iDiv) Halle-Jena-Leipzig,
Leipzig, Germany
Keywords:
Functional Traits, Digitized Plant Specimens, Deep Learning, Improved YOLO V3, Object Detection,
Herbarium Haussknecht.
Abstract:
Automatic measurement of functional trait data from digitized herbarium specimen images is of great interest
as traditionally, scientists extract such information manually, which is time-consuming and prone to errors.
One challenging task in the automated measurement process of functional traits from specimen images is the
existence of other objects such as scale-bar, color pallet, specimen label, envelopes, bar-code and stamp, which
are mostly placed at different locations on the herbarium-mounting sheet and require special detection method.
To detect automatically all these objects, we train a model based on an improved YOLO V3 full-regression
deep neural network architecture, which has gained obvious advantages in both speed and accuracy through
capturing deep and high-level features. We made some improvements to adjust YOLO V3 for detecting object
from digitized herbarium specimen images. A new scale of feature map is added to the existing scales to
improve the detection effect on small targets. At the same time, we adopted the fourth detection layer by a
4* up-sampled layer instead of 2* to get a feature map with higher resolution deeper level. The experimental
results indicate that our model performed better with mAP-50 of 93.2% compared to 90.1% mean IoU trained
by original YOLO V3 model on the test set.
1 INTRODUCTION
Most of the worldwide herbaria are subscribed in
the initiative of the digitization. This process
aims at transforming all physical mounted specimens
into digital ones. Recent initiative as herbarium
Haussknecht of Jena (HHJ) in Germany has started
the digitization process and provides access to 30k
herbarium images. Each digitized herbarium speci-
men (DHS) image includes seven classes of objects:
plant specimen, scale bar, stamp, color pallet, speci-
men label, envelope, and bar-code. One challenging
task in automated object detection is due to specific
issues like occlusions and variations in scale and ran-
dom placement on herbarium-mounting sheet. Sev-
eral papers of object detections were built based on
handcrafted approaches, which have existed before
deep learning era like Haar-like features (Vondrick
et al., 2015) (Heisele, 2003) (Viola and Jones, 2004),
integrogram (Viola and Jones, 2001), histogram of
oriented gradient (HOG) (Felzenszwalb et al., 2010)
(Lowe et al., 1999) (Lowe, 2004) (Belongie et al.,
2002), Hough Transform (Hussin et al., 2012) and
Deformable Part-based Model (DPM) (Felzenszwalb
et al., 2008) (Felzenszwalb et al., 2010). These ap-
proaches have adopted for various fields of object
detection and they are still being used in practice.
However, they are time-consuming and not reliable
enough for automatic object detection. At present,
with the continuous development of computer hard-
ware, modern deep learning models have made in-
credible progress in computer vision tasks. They are
widely used for object detection tasks by detecting
objects in complex scenarios. Furthermore, these ap-
proaches can be grouped into two categories: two-
stage detection and one-stage detection. R-CNN (Gir-
shick et al., 2014) (Regions with CNN features) de-
veloped by Ross Girshick in 2014 is one of the first
breakthroughs of the use of CNNs in an object detec-
tion system which made significant progress in the ef-
ficiency of object detection. The proposed algorithm
is composed of three main steps: region proposals ex-
Triki, A., Bouaziz, B., Mahdi, W. and Gaikwad, J.
Objects Detection from Digitized Herbar ium Specimen based on Improved YOLO V3.
DOI: 10.5220/0009170005230529
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
523-529
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
523

traction, CNN (Convolutional Neural Networks) fea-
ture computation and bounding-box regression. The
proposed RCNN uses a selective search algorithm
(van de Sande et al., 2011) to extract 2000 region pro-
posals from the input image. Each candidate region
proposal fed into CNN to produce features as output.
Consider that a large number of overlapping regions
take a huge amount of time to train the network, re-
sulting in a waste of computing resources and leads
to an extremely slow detection speed. Furthermore,
RCNN could lead to the generation of bad candidate
region proposals since it uses the selective search al-
gorithm which is a slow and time-consuming process
affecting the performance of the network. Hence,
to solve some of R-CNN drawbacks, Spatial Pyra-
mid Pooling Networks (SPPNet) (He et al., 2014)
was proposed by k. He et al. Unlike the previous
CNN models involving a fixed-size of the input im-
age, SPPNet uses a Spatial Pyramid Pooling (SPP)
layer allowing a CNN to produce a fixed-length rep-
resentation where any image sizes can be inputted. In
spite of its improvements over RCNN model, there
are sitll some disadvantages: (1) the training stage
is too slow, (2) SPPNet focuses only on fine-tuning
its fully connected layers whereas all previous lay-
ers are neglected. In 2015, Ross took into considera-
tion these limitations and has proposed Fast-RCNN
(Girshick, 2015), which makes the class classifica-
tion faster. The input image feeds into a CNN to
generate a convolutional feature map. The region of
proposals are determined directly from the convolu-
tional feature map where Fast-RCNN integrates a RoI
pooling layer to reshape the identified region proposal
into a fixed size making the classification faster but it
still relies on selective search which can take around
2 seconds per image to generate bounding box pro-
posals. Thus, it has high mAP but it can’t meet real-
time detection. Faster-RCNN (Ren et al., 2015) re-
places a selective search algorithm and integrates an
RPN branch networks to predict the region proposals.
These solutions have improved the speed of Faster-
RCNN but it is still difficult to meet the real-time
engineering requirements. Compared with the two-
stage detection approaches, the one-stage detection
approaches often involves finding the right trade-off
between accuracy and computational efficiency. The
SSD (Liu et al., 2015) is a common object detection
algorithm which performs a single forward pass of
the network to locate and identify multiple objects
within the input image. Therefore, it achieves good
speed efficiency compared with two-shot RPN-based
approaches. After continuous iterative improvement
of YOLO, Joseph Redmon proposed YOLO V3 (Red-
mon and Farhadi, 2018) which is three times faster
than SSD. For 320x320 images, the detection speed of
YOLO V3 can reach 22ms. Considering the variabil-
ity in size and position of objects within the digitized
herbarium specimens images, it is more appropriate
to use YOLO V3 as the target detection network be-
cause it offers a very fast operation speed with good
accuracy to predict the objects within the DHS im-
ages. However, YOLO V3 often struggled with small
and occluded objects. To address this issue, we pro-
posed an automatic object detection method based on
an improved YOLO V3 deep neural network, which
is developed, based on the Darknet framework. The
proposed approach uses the last four scales of feature
maps, which are rich in detail localization informa-
tion to detect small and occluded objects from the
DHS (figure 2). Furthermore, we adopted the fourth
detection layer by a 4* up-sampled layer instead of
2* to get a feature map with higher resolution and
lower level. The improved YOLO V3 was trained on
data provided by the herbarium Haussknecht in Ger-
many. The experimental results show very high de-
tection speed and accuracy under the same detection
time.
2 PROPOSED APPROACH
YOLO V3 is the third generation of You Only Look
Once (YOLO). YOLO was originally proposed by
Joseph Redmon of Washington University where the
algorithm uses the Google LeNet model designed by
Google to realize end-to-end object detection. The
core idea of YOLO is to divide the input image into
grid cells of the same size. If the center point of
the object’s ground truth falls within a certain grid,
the grid is responsible for detecting the target. Note
that each grid generates K anchor boxes of differ-
ent scales and outputs B prediction bounding boxes,
including position information of the bounding box
(center point coordinates x, y, width w, height h), and
prediction confidence. To alleviate the defect of the
previous generation of YOLO, YOLO V3 integrates
residual network and adds batch normalization (BN)
layer and Leaky ReLU layer after each convolution
layer. At the same time, YOLO V3 adopts a multi-
scale prediction method similar to FPN (Lin et al.,
2016) (Feature Pyramid Networks) network to have
a better detection effect for large, medium and small
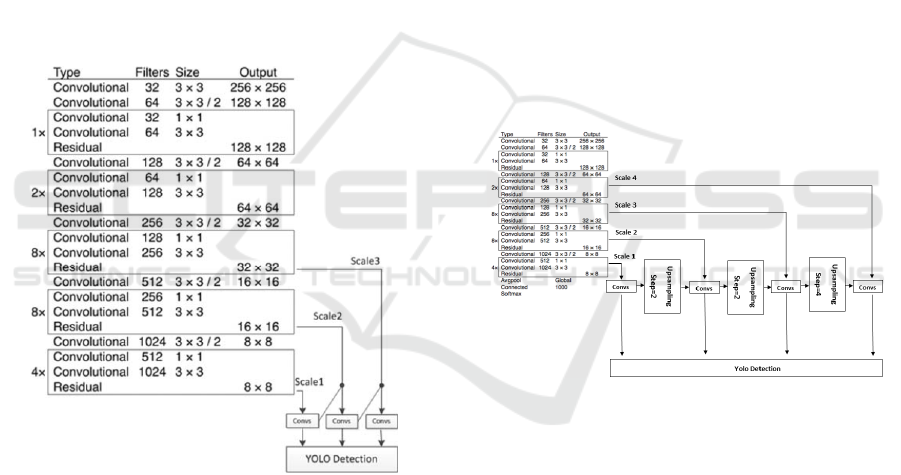
targets. As presented in figure 1, it uses three scales
of prediction (13 x 13, 26 x 26 and 52 x 52) in order
to output different sizes of feature maps. On the other
hand, YOLO V3 borrows the idea of using dimension
clusters as anchor boxes (Ren et al., 2015) for predict-
ing bounding boxes of the system. It uses nine cluster
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
524
centers (three for each scale), which can better cover
the characteristics of the ground truth of the train set.
Each bounding box is represented by a quintuple: x,
y, w, h, and a confidence score. Confidence scores
represent the precision of the predicted bounding box
when the grid contains an object. Note that the con-
fidence score is equal to 1 if the bounding box prior
overlaps a ground truth object by more than any other
bounding box prior. Else, it will ignore the prediction
when the confidence score of detection is lower than
the threshold. YOLO V3 uses Darknet53 network as
the backbone (Figure 1) which originally composed
of 53-layer network trained on ImageNet (Deng et al.,
2009). For the task of detection, 53 more layers are
stacked onto it. This is the reason behind the slow-
ness of YOLO v3 compared to YOLO v2. Regarding
the performance, it has been proved to be more ef-
fective than Darknet-19, 1.5 times more efficient than
ResNet-101 and 2 times much better than ResNet-152
(Redmon and Farhadi, 2018).
Figure 1: YOLO V3 network structure.
Furthermore, the structure of YOLO V3 is simi-
lar to ResNet (He et al., 2015); both use the resid-
ual to make the network deeper. To preserve the tar-
get characteristics and facilitate the calculation of loss
function, YOLO V3 adds a large number of convo-
lution layers of 1x1 and 3x3. YOLO V3 makes de-
tection at three different scales (13x13, 26x26 and
52x52) where the up-sampled layers concatenated
with the previous layers preserve the fine-grained fea-
tures, which help in detecting small objects. The
first detection is made by few convolutional layers,
which detect the high-resolution and low-level fea-
tures. For the second detection layer, layers are up-
sampled by a factor of 2 and concatenated with the
features maps from the earlier network having iden-
tical feature map sizes. Another detection is now
made at the third detection layer with stride 16 where
the same up-sampling procedure is repeated between
2* up-sampled features from the second detection
layer and the much earlier network to detect the low-
resolution and high-level features. After conducting
experiments, the detection performance of the origi-
nal YOLO V3 is poor for small and occluded objects.
That is because the feature maps used for prediction
in YOLO v3 network only have three scales and lack
of fine-grained information of small objects like plant
specimens with small leaves. As shown in figure 2,
we added a new scale of feature map to the existing
scales. As a result, four scales of feature maps are
adopted to detect small and occluded objects. Be-
sides, we changed the fourth detection layer which
is rich in detail localization information by a 4* up-
sampled layer instead of 2* to get a feature map. As
a result, the improved YOLO V3 can detect all ob-
jects within the DHS with accurate and stable bound-
ing boxes.
Figure 2: Improved YOLO V3 network structure.
3 EXPERIMENTAL SETUP
During the experiment step, we have used the free
cloud service provided by Google, which is based on
Jupyter Notebooks that support free GPUs. Google
Colaboratory is a free cloud service for machine
learning education and research with 12 GB of RAM
and NVIDIA Tesla T4. Furthermore, the performance
evaluation of the involved system is tested on data
provided by the herbarium Haussknecht of FSU Jena.
3.1 Database
We train our CNN model on data provided by the
herbarium Haussknecht in Germany, which gave ac-
cess to more than 30k scanned specimen images to
Objects Detection from Digitized Herbarium Specimen based on Improved YOLO V3
525
researchers and the public. The collected data con-
tain objects with a high degree of variability in scale
and occlusion, making it one of the most challenging
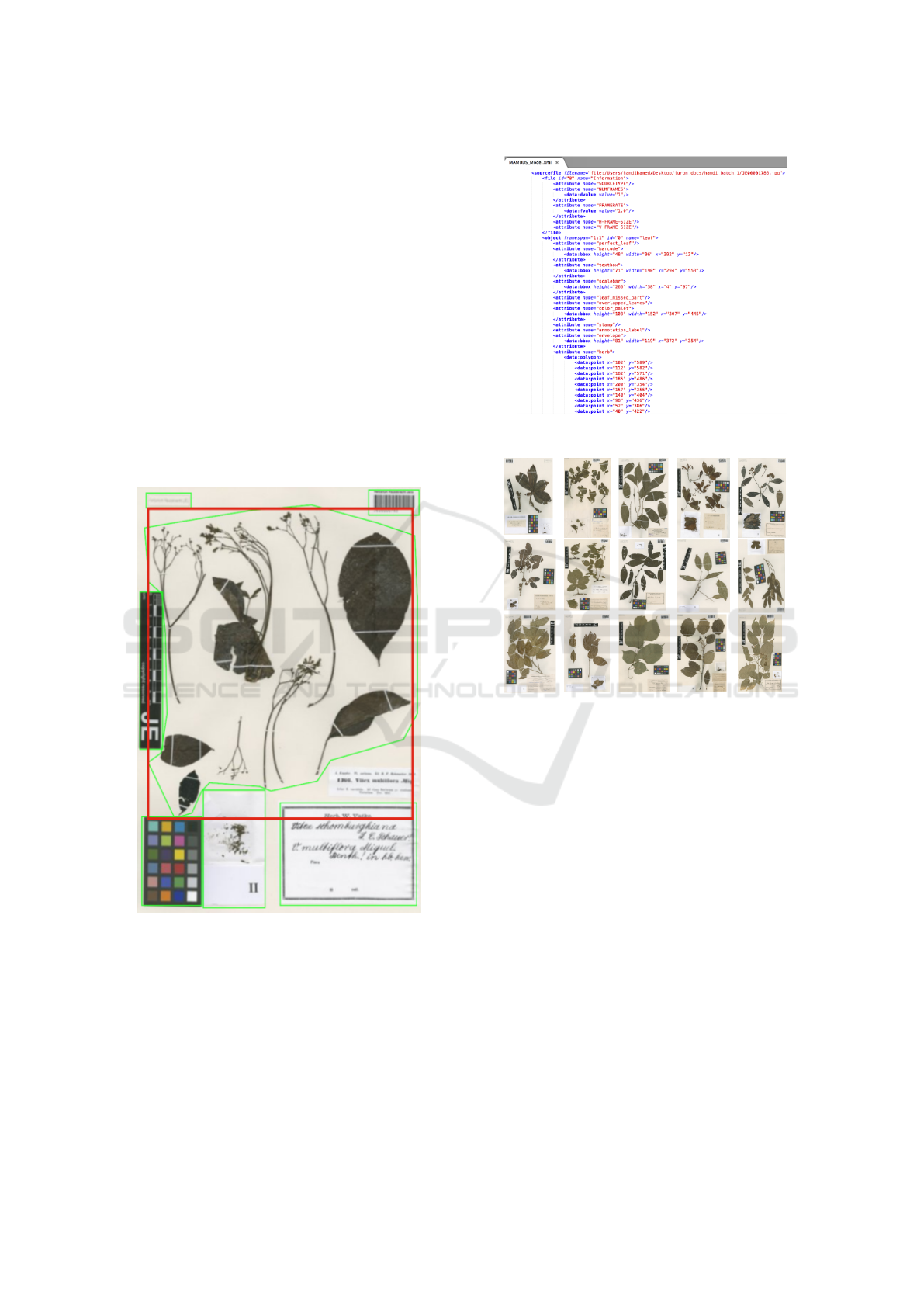
data sets. Among them, we annotated manually 4000
images having specimen images with distorted leaves
(leaves with missed part) or overlapping leaves, not
only specimens containing perfect leaves and some
samples are shown in Figure 5. Herbarium specimen
images contain seven main regions of scale-bar, bar-
code, stamp, annotation label, color pallet, envelope,
and the plant specimen. Every region is represented
by a bounding box described by x, y, width and height
within the XML file (Figure 3). We emphasize that
the bounding box is dedicated by annotating all ob-
jects within the digitized specimen images except the
plant specimen region. Otherwise, because of its ir-
regular shape, we describe the plant specimen region
by a bounding polygon.
Figure 3: Annotation process of a digitized specimen im-
age.
Consequently, the associated element within the
XML annotation file is described by a set of coordi-
nates x, y attributes (Figure 4). To avoid over-fitting
problems, we used data augmentation techniques by
applying some simple transformations such as hori-
zontal and vertical flipping, rotation and color space
to increase the number of samples in our network
(Zhang et al., 2016).
Figure 4: Example of the XML annotation file.
Figure 5: Examples of herbarium Haussknecht dataset.
The dataset was divided into 80% training set,
10% validation set and 10% test set. We trained the
original YOLO V3 and improved YOLO V3 models
on DHS database. In both networks, the parameters
are set as follows: the initial learning rate is reduced
to 0.0001 and batch size is 6. Furthermore, all net-
works were trained for 10000 iterations and we got
the avg loss curve as presented in Figure 7.
4 RESULTS AND EVALUATION
We test our object detection model based on improved
YOLO V3 on the HHJ database. We selected 400
testing samples as input to the network. Currently,
the evaluating metrics commonly used in object de-
tection include mean Intersection Over Union (IoU),
recall, precision, mean Average Precision (mAP) and
so on. As shown in Table 1, when thresh is set to 0.25,
it is verified that the precision accuracy of our pro-
posed approach is increased by more than 3% com-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
526
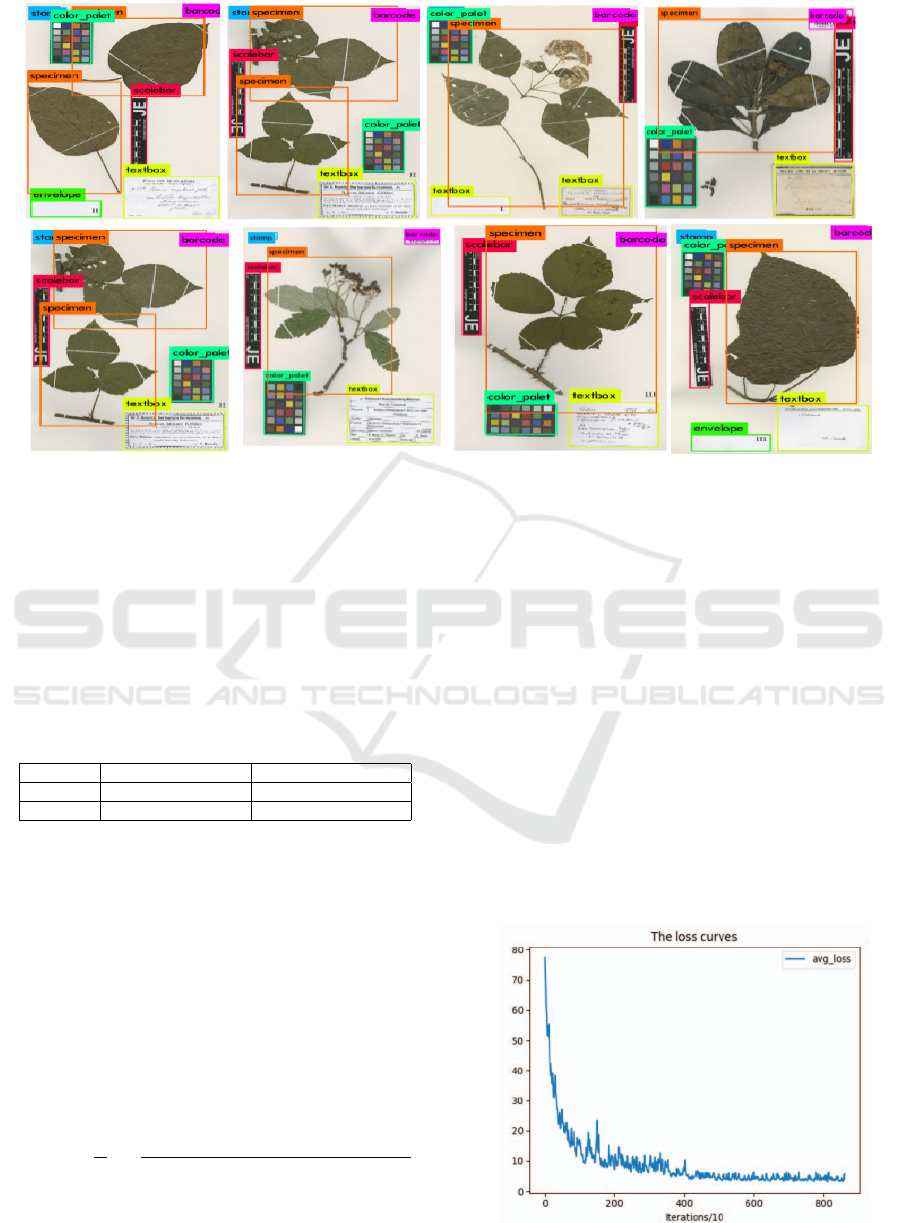
Figure 6: Object detection results by improved YOLO V3 on HHJ dataset.
pared with the original YOLO V3. Whereas the recall
reaches 94%, improving 5%. It can be seen that our
object detection model has good adaptability and ro-
bustness to objects with a high degree of variability in
scale and occlusion. Regarding the calculation time,
improved YOLO V3 takes more time compared to the
original YOLO V3. This is due mainly to the bigger
scale of the feature map, which increases the calcula-
tion time.
Table 1: Precision / Recall Accuracy.
Index Original YOLO V3 Improved YOLO V3
Precision 88% 91%
Recall 89% 94%
Numerous metrics have been used by different ap-
proaches for evaluating the object detection models
(Lateef and Ruichek, 2019). One of the most impor-
tant evaluation metrics is the Intersection over Union
(IoU). This metric quantifies the similarity between
the ground truth and the predicted bounding boxes for
each class and provides a mean IoU which is calcu-
lated by taking the IoU of each class and averaging
them. As shown in Equation 1, MIoU calculates the
ratio of true positives over the sum of true positive,
false positive and false negative.
MIoU =
1
C
C
∑
x=1
T P
xx
∑
C
y=1
FP
xy
+
∑
C
y=1
FN
yx
− T P
xx
(1)
Where C is the total number of classes, TPxx rep-
resents the true positives samples, FPxy represents the
false positive samples and FNyx represents the false
negative samples.
As shown in Table 2, both the original and im-
proved YOLO V3 models performed well on valida-
tion and test sets where the proposed model can detect
small objects with a MIoU of 94% for stamp object
while the performance is slightly better with both val-
idation and test MIoU of 96% for specimen object.
To verify the efficiency of our model, the loss
curves of improved YOLO V3 is shown in figure 7.
The loss curve shows a gradual decrease in the loss as
the training progress. This behavior is observed un-
til iteration 9000 where the loss no longer decreases,
which indicates that the training is sufficient and the
network can be tested. Furthermore, our proposed
approach progressively improved and eventually pro-
duced better results.
Figure 7: Loss curve.
Objects Detection from Digitized Herbarium Specimen based on Improved YOLO V3
527

Table 2: Mean Intersection over Union Measurements.
Objects Original YOLO V3 Improved YOLO V3
Stamp 88% 94%
bar-code 86% 93%
Scale Bar 88% 91%
Color Pallet 92% 93%
Specimen Label 91% 94%
Envelope 92% 91%
Specimen 94% 96%
Time(s) 0.1 0.4
From the experimental results, the improved
YOLO V3 performances were evaluated using mAP-
50 metric which is an extension of average precision
where we take the average of all AP’s to get the mAP
and the model score threshold is set at 50%. The
mAP-50 of the proposed method is increased by 2.1%
compared to the original YOLO V3 (Table 3). This
shows that the proposed method achieves good accu-
racy without a significant speed-up drop.
Besides, the detection results in Figure 6 demon-
strate that our method is effective to detect multiple
small objects within the digitized herbarium speci-
mens such as a stamp, bar-code and plant specimens
with small leaves.
Table 3: mAP.
Original YOLO V3 Improved YOLO V3
mAP 90.1% 93.2%
5 CONCLUSION AND FUTURE
WORK
In this paper, we proposed an improved YOLO V3
based method for detecting objects of different sizes
and locations from DHS images. In the prediction
process, we added a new scale of feature map to the
existing scales to detect smaller objects. At the same
time, we adopted the fourth detection layer by a 4*
up-sampled layer instead of 2* to get a feature map
with a higher resolution level. In terms of efficiency,
the proposed algorithm improves the detection ac-
curacy compared to the original YOLO V3. In fu-
ture work, we intend to extend this work by utiliz-
ing our proposed method in building an identification
system for herbarium collected specimens by consid-
ering the detected plant bounding box as input to a
leaves species classifier and serve as a base for leaves
species measurements.
ACKNOWLEDGEMENTS
This work is part of the MAMUDS project (Man-
agement Multimedia Data for Science) which is
funded by the German ministry of education and
research (BMBF Project No. 01D16009) and
Tunisian ministry of higher education and research in-
cluding herbarium Haussknecht, University of Sfax
and Friedrich-Schiller University, Jena. Authors
would like to thank Prof.dr. Birgitta K
¨
onig-Ries,
Prof.Dr.Frank Hellwig, and Dr. J
¨
orn Hentschel for
supporting this project.
REFERENCES
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape
matching and object recognition using shape contexts.
IEEE Trans. Pattern Anal. Mach. Intell., 24(4):509–
522.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Felzenszwalb, P., Mcallester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. Computer Vision and Pattern Recogni-
tion, 2008. CVPR 2008. IEEE Conference on.
Felzenszwalb, P. F., Girshick, R. B., and McAllester, D.
(2010). Cascade object detection with deformable part
models. In 2010 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
2241–2248.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrimi-
natively trained part-based models. IEEE Trans. Pat-
tern Anal. Mach. Intell., 32(9):1627–1645.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the 2015
IEEE International Conference on Computer Vision
(ICCV), ICCV ’15, pages 1440–1448, Washington,
DC, USA. IEEE Computer Society.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
2014 IEEE Conference on Computer Vision and Pat-
tern Recognition, CVPR ’14, pages 580–587, Wash-
ington, DC, USA. IEEE Computer Society.
He, K., Zhang, X., Ren, S., and Sun, J. (2014). Spatial
pyramid pooling in deep convolutional networks for
visual recognition. CoRR, abs/1406.4729.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Heisele, B. (2003). Visual object recognition with super-
vised learning. IEEE Intelligent Systems, 18(3):38–
42.
Hussin, R., Juhari, M. R., Kang, N. W., Ismail, R., and Ka-
marudin, A. (2012). Digital image processing tech-
niques for object detection from complex background
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
528

image. Procedia Engineering, 41:340 – 344. Interna-
tional Symposium on Robotics and Intelligent Sensors
2012 (IRIS 2012).
Lateef, F. and Ruichek, Y. (2019). Survey on semantic seg-
mentation using deep learning techniques. Neurocom-
puting, 338:321 – 348.
Lin, T., Doll
´
ar, P., Girshick, R. B., He, K., Hariharan, B.,
and Belongie, S. J. (2016). Feature pyramid networks
for object detection. CoRR, abs/1612.03144.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S. E.,
Fu, C., and Berg, A. C. (2015). SSD: single shot multi-
box detector. CoRR, abs/1512.02325.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2):91–
110.
Lowe, D. G., Lowe, D. G., and Lowe, D. G. (1999). Ob-
ject recognition from local scale-invariant features. In
Proceedings of the International Conference on Com-
puter Vision-Volume 2 - Volume 2, ICCV ’99, pages
1150–, Washington, DC, USA. IEEE Computer Soci-
ety.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. CoRR, abs/1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Proceedings of the 28th Inter-
national Conference on Neural Information Process-
ing Systems - Volume 1, NIPS’15, pages 91–99, Cam-
bridge, MA, USA. MIT Press.
van de Sande, K. E. A., Uijlings, J. R. R., Gevers, T., and
Smeulders, A. W. M. (2011). Segmentation as selec-
tive search for object recognition. In 2011 Interna-
tional Conference on Computer Vision, pages 1879–
1886.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. pages 511–518.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. Int. J. Comput. Vision, 57(2):137–154.
Vondrick, C., Khosla, A., Pirsiavash, H., Malisiewicz, T.,
and Torralba, A. (2015). Visualizing object detection
features. CoRR, abs/1502.05461.
Zhang, C., Bengio, S., Hardt, M., Recht, B., and Vinyals,
O. (2016). Understanding deep learning requires re-
thinking generalization. CoRR, abs/1611.03530.
Objects Detection from Digitized Herbarium Specimen based on Improved YOLO V3
529
