
Challenges of Visually Realistic Augmented Reality
Claus B. Madsen
a
Computer Graphics Group, Aalborg University, Rendsburggade 14, Aalborg, Denmark
Keywords:
Augmented Reality, Illumination, Realism, Shadows.
Abstract:
Why is achieving real-time handheld visually realistic Augmented Reality so hard? What are the main chal-
lenges? We present an overview of these challenges, and discuss the most important issues involved in de-
veloping AR that automatically adapts to changes in the environment, specifically the illumination conditions.
We then move on to present how we see a path of research going forward for the immediate future; a path
based partly on recent advances in real-time 3D modelling and partly on lessons learned from a decade of
Augmented Reality illumination estimation research.
1 INTRODUCTION
Augmented Reality (AR) is gaining new momentum
with the advent of easy-to-use APIs such as ARKit,
ARCore, and Vuforia. With these APIs it has never
been easier to develop robust handheld AR experi-
ences. If the purpose of an AR application is to create
the illusion that a virtual object is situated, and realis-
tically visualized in the context of an actual physical
scene, then there are 3 main challenges to address: 1)
tracking/registering the camera relative to the scene,
2) handling occlusions between real and virtual ob-
jects, and 3) render the augmented objects with illu-
mination conditions that are consistent with the real
scene; (Azuma et al., 2001). The aforementioned
APIs primarily address the tracking/registration prob-
lem. The occlusion problem will not really find a so-
lution until AR devices are capable of providing an
accurate scene depth value for each pixel in the cam-
era feed, and hence current AR applications basically
assume that augmented objects are positioned on an
uncluttered flat surface, or floating in the air. The last
of the three problems, the illumination consistency,
has actually been the subject of extensive research,
but so far no really elegant, actually functional solu-
tions exist.
In this paper we will not address the issues of
tracking any further. We will also not be spending
much energy on the handling of occlusions. The main
focus of the paper is to list and discuss the main chal-
lenges one faces when trying to develop visually real-
istic AR applications, attempt to give an overview of
a
https://orcid.org/0000-0003-0762-3713
possible research directions that present themselves
in the area. In the end we describe an approach we
believe to be relevant for research in the immediate
future.
Figure 1: A screen shot from the IKEA Place app used in
an outdoor scenario in broad daylight. The arm chair is an
augmentation. The app renders the augmented object with
a generic ”contact shadow”, which is better than not hav-
ing any but in most cases will be inconsistent with the real
shadows. In this case the augmented shadow is inconsistent
in terms of direction, depth and softness.
For the purposes of the discussion in this paper
we will assume that one ultimate goal of AR re-
search is to enable AR applications that are so vi-
sually convincing, that the augmentations cannot be
distinguished from reality. That is, we ultimately de-
sire real-time interactive AR which is as visually con-
vincing as an A-level Hollywood blockbuster movie.
Additionally, we have chosen to limit the paper to
only discussing issues related to so-called video see-
through AR, as opposed to optical see-through AR. In
video see-through AR the real world is experienced
as a video of the real world on a display. In optical
see-through, the real work is sensed directly through
376
Madsen, C.
Challenges of Visually Realistic Augmented Reality.
DOI: 10.5220/0009171303760383
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
376-383
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

a transparent, prism-like optical device which allows
augmentations to be optically mixed with the real-
world view (as in Microsoft Holodeck headsets, for
example).
Sadly, current AR is nowhere near that level. Con-
sider Figure 1. This example is made with the IKEA
Place app and is a good representative of current state
of the art commercial AR. This particular example
mainly focuses on the realism of the shadows cast by
the augmented object, but obviously all other render-
ing related effects would be equally relevant, e.g., re-
flections, refractions, shading, color bleeding, occlu-
sions, depth-of-field, motion blur, etc.
These are all important standard issues for any
kind of rendering application; but AR is by defi-
nition a special kind of rendering application sce-
nario, as part of the final scene is real and part is vir-
tual/rendered, and hence the perceived realism of the
virtual part will naturally be held against, and has to
be visually consistent with, the real part. In fact, the
main challenge in realistic AR can be boiled down to
this: how much do we know about the real part of
the scene? How good are our models of the geome-
try, materials and illumination conditions in the real
scene?
2 ASPECTS OF AR RENDERING
Rendering requires models of the scene geometry,
light/matter models (reflectances) of the materials in
the scene, and models of the scene illumination. Let
us subsequently address these aspects one by one, fo-
cusing on the what is particularly challenging in the
case of AR. In this section we will go through these
in a little more detail, followed by a brief description
of other rendering challenges faced when desiring to
achieve realistic AR. A great in-depth literature re-
view on mixed-reality rendering is provided in (Kro-
nander et al., 2015). Understanding the concept of dif-
ferential rendering as presented in (Debevec, 1998) is
also a good starting point for understanding the chal-
lenges involved. Below we focus on giving a brief
overview of aspects relevant for real-time AR.
2.1 Scene Geometry
In the AR literature it is generally accepted that it
makes sense to divide the scene geometry into three
separate classes, (Debevec, 1998; Debevec, 2002):
1. Augmentations
2. Local scene
3. Distant scene
Augmentations represent the 3D models of the ele-
ments to be augmented into the scene. The local scene
is the part of the scene that has essential radiometric
interactions with augmented objects, e.g., for shad-
ows and occlusions. And lastly, the distant scene is
a term referring to all real elements of the scene for
which we do not absolutely need a detailed represen-
tation, and perhaps simply an image-based represen-
tation will have to suffice. Examples of these classes
are shown in Figure 2.
Figure 2: Top: the sculpture constitutes the augmentation
class; the local scene made up of a model of the cave
wall on the left to receive the cast shadow; the rest of the
cave is the distant scene and only represented by an im-
age. Rendered with a real-time AR application, (Madsen
and Laursen, 2007). Bottom: the pyramid, the teapot, the
cylinder and the text are the augmentations; the local scene
is the supporting plane and a cylinder modelling the trunk of
the tree; the rest of the image is the distant scene. Rendered
with Autodesk 3ds Max.
Given this breakdown of scene elements it is ob-
vious that the geometry of the augmentations can be
as complex as the application requires, while taking
into account that the rendering framework has to be
able to handle the complexity. Similarly, if very in-
tricate handling of occlusion between augmented and
local scene elements is required, the main challenge
is obtain sufficiently detailed geometry models for the
local scene. In Figure 2 a small tree trunk is modelled
by a simple cylinder to handle the occlusion between
the tree and the pyramid. In actual real-time AR appli-
Challenges of Visually Realistic Augmented Reality
377

cations the realistic handling of occlusion remains one
of the absolute main challenges, and in many cases
failure to properly handle this will totally break the
illusion.
2.2 Scene Materials
The materials for the augmented geometry in the
scene can naturally be as complex as the application
requires provided the materials can be rendered on
the rendering platform used. Figure 3 shows an ex-
ample combining refraction and specular reflection
mapping. As the distant scene is typically only rep-
resented as image information in AR rendering (basi-
cally as a backdrop), the main challenge from a mate-
rials point of view is the local scene elements. Look-
ing carefully at the teapot in the lower part of Figure
2 it can be seen that the teapot reflects the texture of
the ground plane. This has been achieved by projec-
tively mapping the scene image onto the ground plane
to get geometrically correct reflections. Hence, the
more ambitious one is regarding radiometric interac-
tion between the augmented part of the scene and the
local scene, e.g., reflections (augmented objects re-
flecting local scene elements, and vice versa), color
bleeding, etc., the more accurate the models of local
scene materials have to be.
Figure 3: Example of floating sculpture augmented into
scene with real-time refraction and reflection mapping.
2.3 Scene Illumination
Rendering the augmented objects using illumination
conditions that are consistent with the real scene has
been proven to be essential for achieving realistic AR.
In Figure 2 the top example was rendering with an
image-based representation of the illumination con-
ditions, which we will return to in section 3. The
bottom part was rendered with completely manually
tweaked illumination conditions (a single directional
light source representing the sun, and a hemispherical
dome representing the sky). For an outdoor scenario
such a simple illumination model can be sufficient,
but the problem of establishing a good model of in-
door illumination conditions can be really complex
if there are many potentially differently shaped arti-
ficial light sources, and even contributions of exterior
lighting through windows. For realistic rendering the
placement, geometry, color and intensity (RGB radi-
ances) are needed.
A challenge in AR is to correctly compute the ap-
pearances of shadows cast by augmented objects onto
local scene objects, i.e., adjusting pixels in the im-
age of the real scene so as to appear to be in shadow,
if they were not in shadow had the augmented object
not been there. The correct way to do this for a certain
point in the scene is to computer the ratio of irradiance
received with the augmentation in the scene, to the ir-
radiance received without the augmentation present in
the scene. These irradiances are computed using the
model of the scene illumination.
Related to this it is a challenge in AR to avoid
”double shadow”, i.e., avoid casting virtual shadow in
an area of the real scene that is already in shadow from
the same light source. Notice for example in Figure 2
how we have carefully ensured that the vertical cylin-
der casts its shadow into where a tree outside the field
of view is already casting a shadow. Avoiding dou-
ble shadows is a huge challenge in realistic AR, as
it will require tremendously accurate local scene ge-
ometry models (potentially even for objects outside
the field of view), and similarly accurate illumination
models, i.e., extremely precisely located light sources,
that might also very likely be outside the field of view.
A recent paper, (Wei et al., 2019), presents a really in-
teresting approach to handling this problem based on
shadow edges within the field-of-view.
2.4 Post Processing
This section briefly describes a few other important
elements of achieving realistic AR,- elements that
perhaps not quite as often thought about in current
research, (Borg et al., 2014).
When rendering some computer graphics ele-
ments into a real image it is important to subject the
rendered elements to a level of imaging noise that
matches the imaging noise in the real image. Studies
have proven this to be important. Especially in low
level lighting conditions small digital cameras, such
as smart phones, have significant levels of imaging
noise, and augmentations should be subject to simi-
lar levels of noise to avoid the absence of noise being
conspicuous.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
378

The silhouette of the augmented objects also
needs to be handled with care so as to not appear
fake and ”too perfect” compared to the rest of the im-
age. Aliasing artifacts around the silhouette should
be handled and some kind of gentle blending of the
augmentation with the real image background is nec-
essary. Related to this, it will also be necessary for fu-
ture realistic AR applications to render augmentation
with depth-of-field blurring that is consistent with the
scene and the settings of the camera used.
Motion blur is another important element that in
principle needs to be addressed.
3 ESTABLISHING THE
REQUIRED MODELS
The previous section introduced the most important
elements and challenges in achieving realistic AR.
This section aims at given a brief overview of cur-
rent approaches to obtaining the necessary models
and dealing with the challenges. Since the problem
of easy to use, general purpose, perfectly realistic AR
is by no means solved, there is no end-all, be-all ap-
proach we can describe. Every single relevant ap-
proach that we might describe will be based on a num-
ber assumptions and delimitations.
Before we start, we reiterate that the ultimate
goal in the paper is considered to be handheld (or
with a head-mounted display) video see-through,
real-time Augmented Reality, allowing augmenta-
tions to be rendered into dynamic (geometrically and
illumination-wise) scenes in a visually convincing
manner.
3.1 Scene Geometry
As previously described, obtaining the geometry in-
formation of the local scene is a major challenge.
Most current AR, e.g., IKEA Place assumes the local
scene only consist of the planar surface detected by
APIs such as ARCore or ARKit. In AR research the
local scene is sometimes assumed to have been some-
how modelled in advance, and hence assumed static,
e.g., Figure 2.1 top.
Figure 4 shows an example where a real-time
binocular stereo camera has been used to obtain a
snapshot of a dynamic local scene. The geometry res-
olution provided by the stereo camera is sufficient for
a realistic 3D model of the main elements of the local
scene, but not quite precise enough to correctly model
the geometry of the person.
We believe the trend regarding local scene mod-
elling for handheld devices to be moving towards real-
Figure 4: Augmentation rendered into scene with local
scene obtained from a real-time stereo camera, (Madsen and
Lal, 2013).
time 3D modelling exploiting multiple cameras in
the device and combining it with real-time Structure-
from-Motion (SfM) techniques, such as the 6D.ai
API. These approaches will be able to generate per-
sistent models that extend outside any instantaneous
field-of-view by accumulating geometry information
over time as the user moves around and points the de-
vice in different directions. Future APIs may even
very well be able employ cloud services where multi-
ple users feed scanned geometry into a globally per-
sistent model that others users can use and help up-
date.
We believe SfM-based models will be useful for
serving as local scene models in AR applications,
but we highly doubt that these models will be good
enough to convincingly handle occlusions between
e.g., humans and augmentations. For this purpose it
is much more likely that AI based approaches to seg-
menting humans from video, like BodyPix 2.0, will
prevail for near future AR applications.
An issue regarding scene modelling is that the
border between what is local scene and what can be
treated distant scene is dependent on the scale of the
augmentation. If augmenting a fire hydrant on a side-
Challenges of Visually Realistic Augmented Reality
379
walk, then the sidewalk may be the only necessary lo-
cal scene, and nearby buildings can be considered dis-
tant scene. If augmenting a building into a scene, nat-
urally neighbouring buildings suddenly become im-
portant local scene elements.
3.2 Scene Materials
Work on inverse global illumination, e.g., (Yu et al.,
1999), demonstrates how complex it is to perform
proper non-diffuse-only material model estimation in
mixed reality scenes based, as it requires highly de-
tailed 3D models of surfaces and multiple views of
each point on those surfaces. As of yet, this type of
approach is not relevant for AR application attempt-
ing to achieve real-time performance. In most (all?)
AR research the material of local scene elements is
considered to be perfectly diffuse and the appearances
are lifted directly from the image/video of the scene.
In some research the appearances are then used to
estimate the diffuse albedos of the surfaces by tak-
ing into account knowledge of the illumination in the
scene, (Madsen and Laursen, 2007). For future re-
search in realistic AR we believe more research needs
to go into estimating surface reflectances from mul-
tiple views are the user is moving the device around
and looking in different directions. With good track-
ing it will be possible to integrate these different ap-
pearance measurements into an estimated reflectance
model, perhaps by having a small set of categories of
material, e.g., diffuse such as concrete and brick wall,
glossy such as lacquered surfaces, and highly specular
surfaces such as windows and puddles.
3.3 Scene Illumination
Some AR research aiming at achieving visual real-
ism has adopted the concept of light probes originally
developed for movie productions, see Figure 5, (De-
bevec, 2002; Kanbara and Yokoya, 2004; Jacobs and
Loscos, 2004). The idea being that the illumination
conditions at the location where something has to be
augmented are captured in a omni-directional image.
This image then has to be in High Dynamic Range
format, as it requires many orders of magnitude dy-
namic range to capture illumination conditions where
for example the sun is 5 orders of magnitude more
bright than the sky, (Dutre et al., 2002).
Clearly it is not possible to use a static light probe
for AR in a dynamic scene. The ARCore API is now
able to accumulate a light probe image of the scene as
the users moves around, but the image is not in a HDR
format. ARCore also offers functionality for estimat-
ing the direction a a dominant directional light source
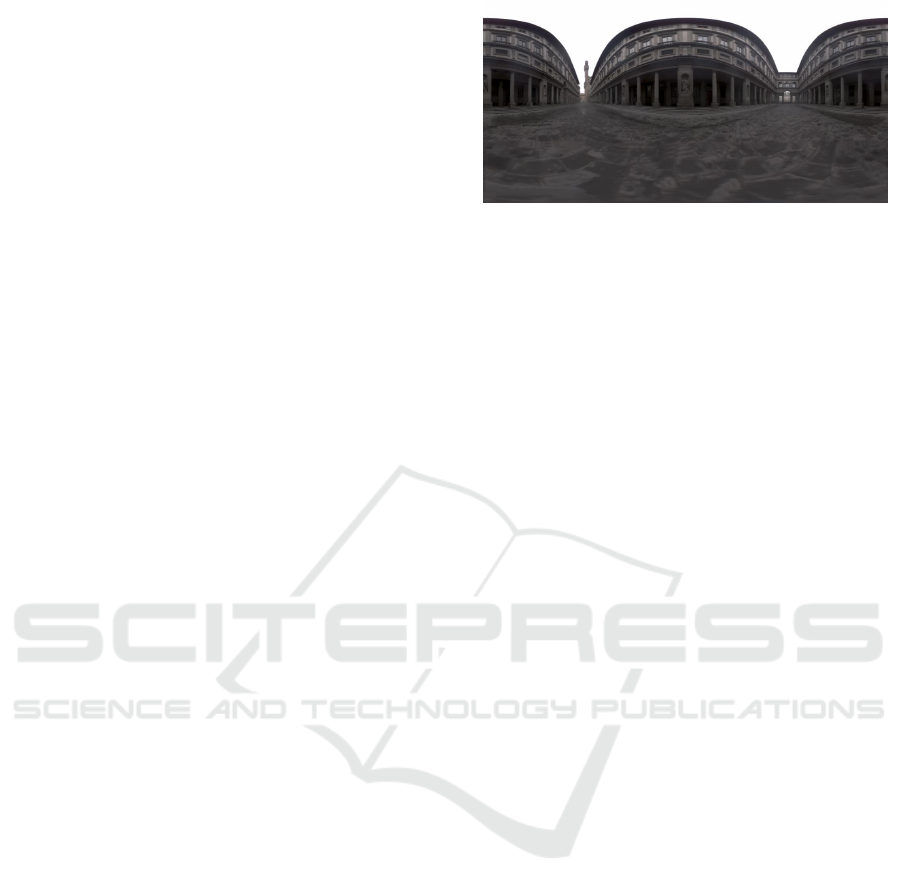
Figure 5: Latitude-longitude mapping of omni-directional
HDR light probe image applicable for image-based lighting.
in scenes, (ARCore, 2020), although it remains to be
evaluated how well this novel functionality works in
various scenarios.
Related research is aimed at developing Machine
Learning approaches to ”guesstimate” illumination
conditions from a video frame, simply by training on
video sequences and associated videos of how real
diffuse and specular spheres look like in that scene,
(LeGendre et al., 2019; Hold-Geoffroy et al., 2016).
We are currently looking into how to classify weather
conditions from video images so as to be able to use
various outdoor daylight models for outdoor AR.
Other research has applied a more model based
approach and tried to estimate the illumination con-
ditions from automatically detected shadows in real
scenes, (Madsen and Lal, 2013). Figure 4 was an ex-
ample of this. In a recent paper it has been demon-
strated how that approach could be adopted to run in
real-time on a handheld device for very simple scenes,
Figure 6, (Bertolini and Madsen, 2020). Other re-
lated work in this area, demonstrating how the various
sensors on mobile devices can be utilized is (Barreira
et al., 2018).
We believe the current trend for illumination esti-
mation for AR to be moving in the direction of using
machine learning to estimate simplified illumination
parameters for augmented reality simply by employ-
ing massive amounts of training data. We also be-
lieve that this approach might very well make it pos-
sible to have AR objects shaded in a manner which
is generally consistent with the real scene. Neverthe-
less, based on more than a decade of experience with
working in this area we still maintain that visual ele-
ments such as directions, depths and softness of shad-
ows, color bleeding etc. will require elements of more
model-based approaches.
4 WHAT WILL WE DO?
As a concrete direction for immediate future research
in the area of realistic AR we propose to focus on
handheld AR for outdoor urban environments, ad-
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
380

Figure 6: Realtime tracking of areas in real sun and real
shadow, and using these areas for estimating the radiances
of the sun and the sky, for rendering a virtual apple into a
scene on an iPhone.
dressing the challenges of continuously, and in real-
time, model the dynamic illumination conditions.
4.1 Geometry
In terms of geometric models for the local and dis-
tant scene elements we propose to investigate real-
time local 3D models acquired by something similar
to the aforementioned 6Dai technique, see Figure 7,
and how to fuse them with larger scale city models
similar to what can be found via, e.g., Google Earth,
i.e., previously scanned and textured models of streets
and buildings. We believe there will be an advantage
in utilizing a mix of these two sources of geometric
and appearance information for the scene.
Such a fused model with have high detail near the
device, and be up to date with objects such as cars
etc., and more coarse detail further away from the de-
vice. The very fact that this will enable geometric in-
formation about the part of the scene which is outside
the current field of view, a part that might never have
been with the field of view, will be very important for
robust illumination estimation.
Figure 7: Realtime generated 3D mesh of local scene cap-
tured from a smartphone.
For detailed occlusion handling, for example par-
tial occlusion of augmentations behind people, trees,
etc., we believe this will need to be handled as a mix-
ture between depth-based approaches and 2D image-
based approaches. The depth information will come
from essentially having RGBd data (per pixel depth)
available on the device from multi-occular stereo-
scopi combined with Structure-from-Motion, and the
really detailed occlusion handling, e.g., silhouettes of
people, will be assisted by image-based segmenta-
tion. In fact, the whole issue of building 3D models
of the environment for AR purposes will most likely
in the near future benefit highly from recent advances
in deep learning approaches to scene segmentation,
recognition, and scene understanding.
4.2 Materials
As mentioned previously the immediate future in AR
will probably treat local scene materials as perfectly
diffuse. The estimation of illumination parameters
will be based on this assumption, and the rendering of
augmentations into the video stream will be based on
this assumption. Nevertheless, we believe that there is
a huge potential in doing more research into estimat-
ing surface material properties from multiple obser-
vations, assuming the AR application user is moving
his/her device around and filming areas from multiple
viewpoints. This will allow for rough classification
into a small set of surface material types, for exam-
ple diffuse/glossy/specular. Such estimation can ob-
viously also benefit from deep learning based mate-
rial classification, so that the AR application would
be able to identify what elements in the scene are e.g.,
windows, puddles, polished tiles, etc. and use this
create realism enhancing effects such as augmented
objects reflecting in glossy surfaces.
4.3 Illumination
In terms of estimating and modelling the illumina-
tion conditions there still are two main competing
Challenges of Visually Realistic Augmented Reality
381

approaches: 1) a machine learning based approach
where scene consistent illumination is estimated and
applied to augmentations, as championed for exam-
ple in (LeGendre et al., 2019), or 2) model-based ap-
proaches where some sort of parametric illumination
model is tuned to the scene based on extraction of var-
ious properties from the image stream, e.g., (Bertolini
and Madsen, 2020).
For outdoor daytime AR we propose to employ an
adaptive daylight model; a daylight model that uses
the time, data, compass reading and geo-location to
compute the direction vector to the sun. The local
scene model would be used to classify which areas
of the scene should be in shadow (if the sun is even
actually shining). The adaptive part of the daylight
models should be that it is tweaked to adapt to the ac-
tual conditions in terms of the weather; e.g., whether
is is a clear blue sky day, partly overcast, completely
overcast, or rainy. Or even if there is snow. This adap-
tation we believe is possible through machine learn-
ing approaches based on monitoring the video feed on
the device, and there are already examples of work in
this area, e.g., (Lu et al., 2017).
The actual estimation of the sun and sky radi-
ances we would in the direction of fusing existing
shadow based approaches with an inverse render-
ing inspired approach comparing the current appear-
ance of surfaces in the local scene model with their
appearance as stored in the cloud model (Google
Earth). We might want to look into doing laser range
finder based capture of huge point clouds for the
streets and buildings, while simultaneously capturing
the corresponding illumination conditions with omni-
directional HDR cameras. This would enable com-
putation of surface reflectances. These stored models
and reflectances could then, at run-time on the hand-
held device make it realistic to estimate the illumina-
tion conditions at that particular time. The viability of
such an approach was tentatively demonstrated in for
example (Jensen et al., 2006).
We believe this combination of 1) streamed, pre-
viously acquired, static models, and 2) run-time ac-
quired additional geometry and illumination estima-
tion, offers a realistic promise of easy to use, real-
time handheld AR which can run on off-the-shelf cur-
rent smartphones. For outdoor scenarios, that is. In-
door scenarios are still much more complicated from
an illumination point of view. The only comfort we
have is that initial perceptual experiments are indicat-
ing that human tolerance to imperfections in illumina-
tion correctness is higher for indoor scenarios. Proba-
bly because it is more difficult to judge what actually
looks correct, as long as the rendered augmentations
are largely consistent with the real scene.
5 CONCLUSIONS
In this paper we have attempted to give an overview
of the primary challenges involved in developing real-
istic AR on handheld devices, which can dynamically
adapt the changing illumination conditions.
We fundamentally believe a lot more work is re-
quired on perceptual studies into how tolerant hu-
mans are to various aspects of imperfections in vi-
sual quality of AR. That said, we have proposed what
we believe to be the best path for future research. A
path that involves mixing geometry capture on the
device using Structure-from-Motion techniques with
streamed, pre-captured gross models of the environ-
ment. Dynamically adaptive illumination estimation
would then be based on inverse rendering techniques
by comparing real-time scene appearance with stored
scene reflectances combined with a parametric day-
light model.
One day in the future it will be possible to hunt vi-
sually convincing augmented dinosaurs in the streets,-
that’s the dream!
ACKNOWLEDGEMENTS
This work was partially funded by the LER project no.
EUDP 2015-I under the Danish national EUDP pro-
gramme, and partially by the DARWIN project under
the Innovation Fund Denmark, case number: 6151-
00020B. This funding is gratefully acknowledged.
The author would also like to take this opportunity
to thank colleagues and students, past and present, for
inspiration.
REFERENCES
ARCore (2020). Using arcore to light models in a scene.
https://developers.google.com/ar/develop/unity/light-
estimation. Accessed: January 7th, 2020.
Azuma, R. T., Baillot, Y., Behringer, R., Feiner, S., Julier,
S., and MacIntyre, B. (2001). Recent advances in
augmented reality. IEEE Transactions on Computer
Graphics and Applications, 21(6):34 – 47.
Barreira, J., Bessa, M., Barbosa, L., and Magalhaes, L.
(2018). A context-aware method for authentically
simulating outdoors shadows for mobile augmented
reality. IEEE Transactions on Visualization and Com-
puter Graphics, 24(3):1223–1231.
Bertolini, F. and Madsen, C. B. (2020). Real time outdoor
light estimation for mobile augmented reality. In Pro-
ceedings: International Conference on Graphics The-
ory and Applications. Accepted.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
382

Borg, M., Paprocki, M., and Madsen, C. (2014). Perceptual
evaluation of photo-realism in real-time 3d augmented
reality. In Proceedings of GRAPP 2014: International
Conference on Computer Graphics Theory and Ap-
plications, pages 377–386. Institute for Systems and
Technologies of Information, Control and Communi-
cation.
Debevec, P. (1998). Rendering synthetic objects into real
scenes: Bridging traditional and image-based graph-
ics with global illumination and high dynamic range
photography. In Proceedings: SIGGRAPH 1998, Or-
lando, Florida, USA.
Debevec, P. (2002). Tutorial: Image-based lighting. IEEE
Computer Graphics and Applications, pages 26 – 34.
Dutre, P., Bala, K., and Bekaert, P. (2002). Advanced
Global Illumination. A. K. Peters, Ltd., Natick, MA,
USA.
Hold-Geoffroy, Y., Sunkavalli, K., Hadap, S., Gambaretto,
E., and Lalonde, J.-F. (2016). Deep outdoor illumina-
tion estimation. 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 2373–
2382.
Jacobs, K. and Loscos, C. (2004). State of the art report on
classification of illumination methods for mixed real-
ity. In EUROGRAPHICS, Grenoble, France.
Jensen, T., Andersen, M., and Madsen, C. B. (2006). Es-
timation of dynamic light changes in outdoor scenes
without the use of calibration objects. In Proceed-
ings: International Conference on Pattern Recogni-
tion, Hong Kong, page (4 pages).
Kanbara, M. and Yokoya, N. (2004). Real-time estimation
of light source environment for photorealistic aug-
mented reality. In Proceedings of the 17th ICPR,
Cambridge, United Kingdom, pages 911–914.
Kronander, J., Banterle, F., Gardner, A., Miandji, E., and
Unger, J. (2015). Photorealistic rendering of mixed
reality scenes. Computer Graphics Forum, 34(2):643–
665.
LeGendre, C., Ma, W.-C., Fyffe, G., Flynn, J., Charbon-
nel, L., Busch, J., and Debevec, P. (2019). Deeplight:
Learning illumination for unconstrained mobile mixed
reality. In The IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
Lu, C., Lin, D., Jia, J., and Tang, C. (2017). Two-class
weather classification. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 39(12):2510–
2524.
Madsen, C. and Lal, B. (2013). Estimating outdoor illu-
mination conditions based on detection of dynamic
shadows. In Csurka, G., Kraus, M., Mestetskiy,
L., Richard, P., and Braz, J., editors, Computer Vi-
sion, Imaging and Computer Graphics, pages 33–52.
Springer Publishing Company, United States.
Madsen, C. B. and Laursen, R. (2007). A scalable gpu-
based approach to shading and shadowing for photo-
realistic real-time augmented reality. In Proceedings:
International Conference on Graphics Theory and Ap-
plications, Barcelona, Spain, pages 252 – 261.
Wei, H., Liu, Y., Xing, G., Zhang, Y., and Huang, W.
(2019). Simulating shadow interactions for outdoor
augmented reality with rgbd data. IEEE Access,
7:75292–75304.
Yu, Y., Debevec, P., Malik, J., and Hawkins, T. (1999).
Inverse global illumination: Recovering reflectance
models of real scenes from photographs. In Pro-
ceedings of the 26th Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’99, page 215–224, USA. ACM Press/Addison-
Wesley Publishing Co.
Challenges of Visually Realistic Augmented Reality
383
