
Different Modal Stereo: Simultaneous Estimation of Stereo Image
Disparity and Modality Translation
Ryota Tanaka, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Gokiso Showa, Naogya, 466-8555, Japan
Keywords:
Multi-modal Images, Stereo Reconstruction, Deep Neural Networks, Modal Translation.
Abstract:
We propose a stereo matching method from the different modal image pairs. In this method, input images
are taken in different viewpoints by different modal cameras, e.g., an RGB camera and an IR camera. Our
proposed method estimates the disparity of the two images and translates the modality of the input images to
different modality simultaneously. To achieve this simultaneous estimation, we utilize two networks, i.e., a
disparity estimation method from a single image and modality translation method. Both methods are based on
the neural networks, and then we train the network simultaneously. In this training, we focus on several con-
sistencies between the different modal images. By these consistencies, two kinds of networks are effectively
trained. Furthermore, we utilize image synthesis optimization on conditional GAN, and the optimization pro-
vides quite good results. Several experimental results by open databases show that the proposed method can
estimate disparity and translate the modality even if the modalities of the input image pair are different.
1 INTRODUCTION
3D reconstruction using a stereo camera system is one
of the most important techniques in the field of com-
puter vision, and then, various kinds of methods are
studied extensively. In these methods, feature points
such as SIFT are detected at first. After that, a cor-
responding point is determined in the other image.
These techniques are based on the assumption that
image feature points in the image pair are similar to
each other. Thus, in the stereo camera systems, the
same modality, representatively RGB, image pair is
used.
On the other hand, various modal cameras, as
shown in Fig.1 are often used for specific purposes
in recent years. For example, IR (infrared) cameras
are used for such as surveillance systems and driving
assist systems at night with IR light sources. Since
the human eyes can not observe IR light, these sys-
tems do not disturb human visual systems. Also,
FIR (far infrared) thermal camera is often utilized for
night surveillance since most of the humans and an-
imals emit FIR light by body temperature. In these
surveillance systems, not only these unique cameras
but also conventional RGB cameras are combinedly
used since RGB images are familiar to the human vi-
sual systems. In addition, traditional computer vision
techniques are for the RGB images, and thus the RGB
images are required to apply these techniques.
Furthermore, these systems often require 3D in-
formation in the scene. However, conventional stereo
camera systems require the same modality cameras,
and then additional cameras arenecessary to construct
the stereo system in existing techniques.
In this paper, we propose a stereo matching
method from different modal image pairs. Our pro-
posed method is based on two techniques. One of
them is the modality translation using a neural net-
work. Although different modal image pairs taken in
the same viewpoint by the different modal cameras
are required to train the deep neural networks in ex-
isting methods, our method achieves training of the
network using image set taken from different view-
points. The other one is a disparity estimation from a
single image. In this technique, different modal im-
ages assist the estimation of disparities. By using
these techniques, we achieve a stereo matching and
modality translation simultaneously from a different
modal image pair.
2 RELATED WORKS
Recently, techniques for multi-modal imaging are
widely studied. Especially, multi-spectral imaging is
one of the most important techniques because of its
wide applications. In general, light spectral informa-
554
Tanaka, R., Sakaue, F. and Sato, J.
Different Modal Stereo: Simultaneous Estimation of Stereo Image Disparity and Modality Translation.
DOI: 10.5220/0009180205540560
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
554-560
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
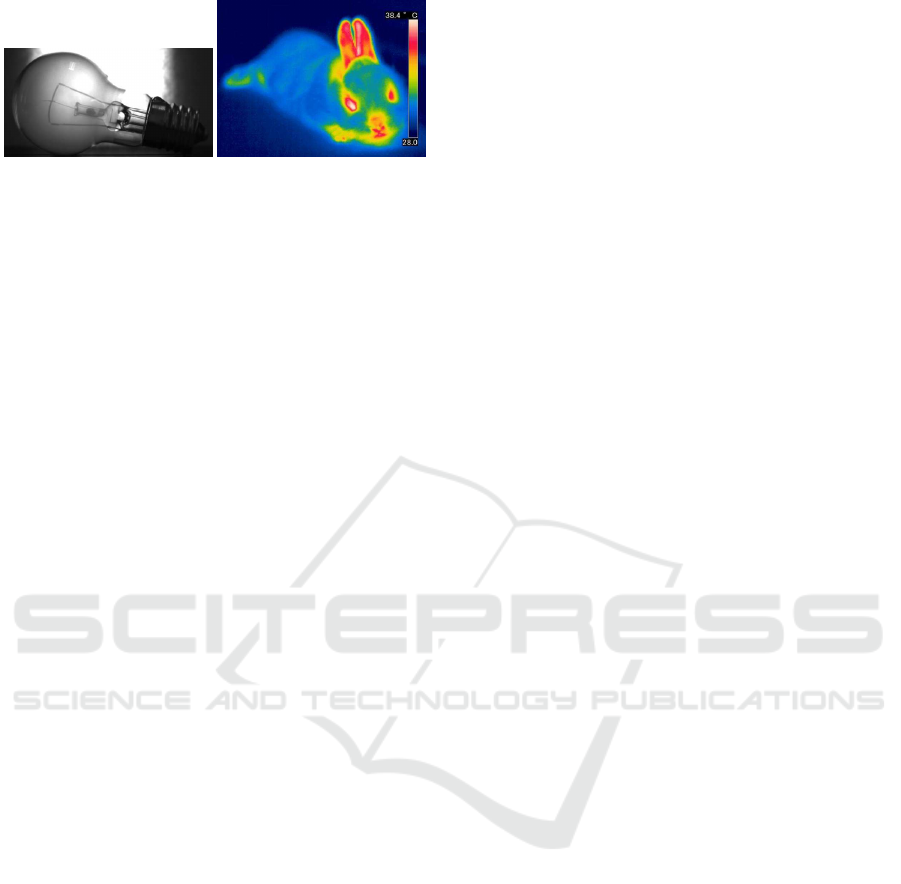
(a) IR image (b) Thermal image
Figure 1: Different modal images taken by special cameras.
tion is taken by a special multispectral camera with a
long capturing time. Thus, the imaging by this cam-
era cannot be applied to dynamic scenes. To avoid
the problem, Kiku et al.(Kiku et al., 2014; Monno
et al., 2014) propose a special camera that equipped a
special Bayer filter. The special Bayer pattern in this
method filter different band light pixel by pixel, and
then, several spectral information can be captured si-
multaneously by a single camera. Since the captured
spectral information by the filter is sparse, the infor-
mation is interpolated to dense information by image
demosaicing technique using a guide image. This
kind of special Bayer pattern can be applied to not
only multi-spectral imaging but also HDR imaging,
IR imaging and so on(Raskar et al., 2006; Levin et al.,
2008; Fergus et al., 2006). Although these methods
can capture multi-modal information from dynamic
scenes, special and expensive camera systems are re-
quired.
Stereo matching of different modal images is also
studied since the stereo matching is one of the essen-
tial problems in the field of computer vision. Zbon-
tar et al.(Zbontar and LeCun, 2016) propose a stereo
matching method based on similarity learning using
CNN. Although the method can be applied multi-
modal image pair as well as the same modal image
pair, the method may not work well when the modal-
ities of input images are much different, such as ther-
mal and RGB(Treible et al., 2017).
In our approach, we do not require correspon-
dences between different modal images to train the
network. This is large advantage because our method
require just stereo camera pair in different modals to
train the network. In addition, our method can ap-
ply to greatly different modal image pairs such as
RGB images and thermal images. Thus, applicable
field can become wider. Furthermore, our method
estimates not only the disparity of the image pair
but also modality translated images from each view-
point. Therefore, a multi-modal image from a single
viewpoint can be virtually obtained from the different
viewpoints camera pair without any special devices.
In the following sections, the detail of our proposed
method is explained.
3 NETWORKS FOR DISPARITY
ESTIMATION AND MODALITY
TRANSLATION
3.1 Disparity Estimation from Single
Image
As described in the previous section, our method uti-
lizes two methods using deep neural networks. In this
section, we summarize these methods before a detail
explanation of our proposed method.
We first explain the disparity estimation from a
single image(Luo et al., 2018). In this method, dis-
parity maps are predicted from the texture informa-
tion of the input images. As larger A large advantage
of the method is that this method does not require cor-
rect disparity data to train the disparity estimation net-
work. This method requires only a set of stereo im-
age pairs to train the network. Let I
r
and I
l
denote the
image taken by the right camera and the left camera,
respectively. The disparity map V(i, j) shows a dis-
parity at point (i, j) in the left image. In this case, the
left image can be translated to the right image
˜
I
r
as
follows:
˜
I
r
(i, j) = I
l
((i, j) +V(i, j)) (1)
When the disparity map V is correct, the estimated
right image close to the real right image I
r
. Therefore,
the disparity map can be evaluated as follows:
ε
V
= k
˜
I
r
− I
r
k (2)
By minimizing the ε
V
, an appropriate disparity map
can be estimated.
To estimate the disparity map V efficiently, not
a direct disparity map V but probability maps V
d
(I
l
)
is estimated from the image. The probability map
V
d
(i, j) denote a probability that the disparity at (i, j)
is d. When the I
(d)
l
denotes the shifted image I((i, j)+
d), the viewpoint changed image
˜
I
d
l
can be estimated
as follows:
˜
I
′
r
=
∑
d
I
(d)
l
V
d
(I
l
) (3)
This equation compute expected values of each point.
The loss function can be defined as follows:
ε
′
V
= k
˜
I
′
r
− I
r
k (4)
By minimizing the loss ε
′
V
, an appropriate estimation
function of the V
d
can be estimated. Details of the
network architecture and this method are in their pa-
per(Luo et al., 2018).
Note that although the method does not require the
correct disparity, modalities of the images should be
the same since the technique uses the similarity of the
image pair.
Different Modal Stereo: Simultaneous Estimation of Stereo Image Disparity and Modality Translation
555
3.2 Modality Translation using
Conditional GAN
We next consider the modality translation of the in-
put image. In this translation, we utilize a framework
of the conditional GAN to synthesize different modal
image. Especially, pix2pix(Isola et al., 2017) pro-
vides effective image translation in a framework of
conditional GAN (cGAN), and we utilize the pix2pix
in our research.
The pix2pix is one of the representative networks
to synthesize different characteristic images from the
input image. Several image translation examples,
such as an edge image to a color image, are reported
based on the framework. In this method, a genera-
tor network and a discriminator network is used. The
generator network synthesizes the translated image,
and the discriminator network decides the image syn-
thesized by the generator is valid or not. By training
these two adversarial networks simultaneously, the
generator accomplishes pretty useful image synthesis.
An objective function of the cGAN can be ex-
pressed as follows:
L
cGAN
(G, D) = E
x,y
[logD(x, y)]
+E
x,z
[log(1− D(x, G(x, z))]
(5)
where G is a generator and the generator synthesize
the image from the noise z under the condition x .
D(x, y) is a discriminator and it provides a probabil-
ity that y can be translated from y. In addition, the
pix2pix uses a similarity between objective image y
and a synthesized image G(x, z) as follows:
L
L1
(G) = E
x,y,z
[ky− G(x, z)k] (6)
From these, an optimized generator is computed as
follows:
G
∗
= argmin
G
min
D
L
cGAN
(G, D) + λL
L1
(G) (7)
Network architecture is in their paper(Isola et al.,
2017).
Note that the pix2pix requires a set of correspond-
ing image pairs. For example, when thermal images
are translated to the RGB image, a thermal image set
and an RGB image set taken the same scenes from
the same viewpoints are required. In our research, the
viewpoints of the cameras are different, and then, we
cannot utilize the pix2pix directly in our method.
>ĞĨƚ ZŝŐŚƚ
ŝŶƉƵƚ
ŝŶƉƵƚ
dŚĞƌŵĂů
Z'
DŽĚĂůŝƚLJdƌĂŶƐůĂƚŝŽŶ
LJĐ'E
sŝĞǁƉŽŝŶƚdžĐŚĂŶŐĞ
ďLJ ŝƐƉĂƌŝƚLJ DĂƉ
sŝĞǁƉŽŝŶƚdžĐŚĂŶŐĞ
ďLJ ŝƐƉĂƌŝƚLJ DĂƉ
DŽĚĂůŝƚLJdƌĂŶƐůĂƚŝŽŶ
LJĐ'E
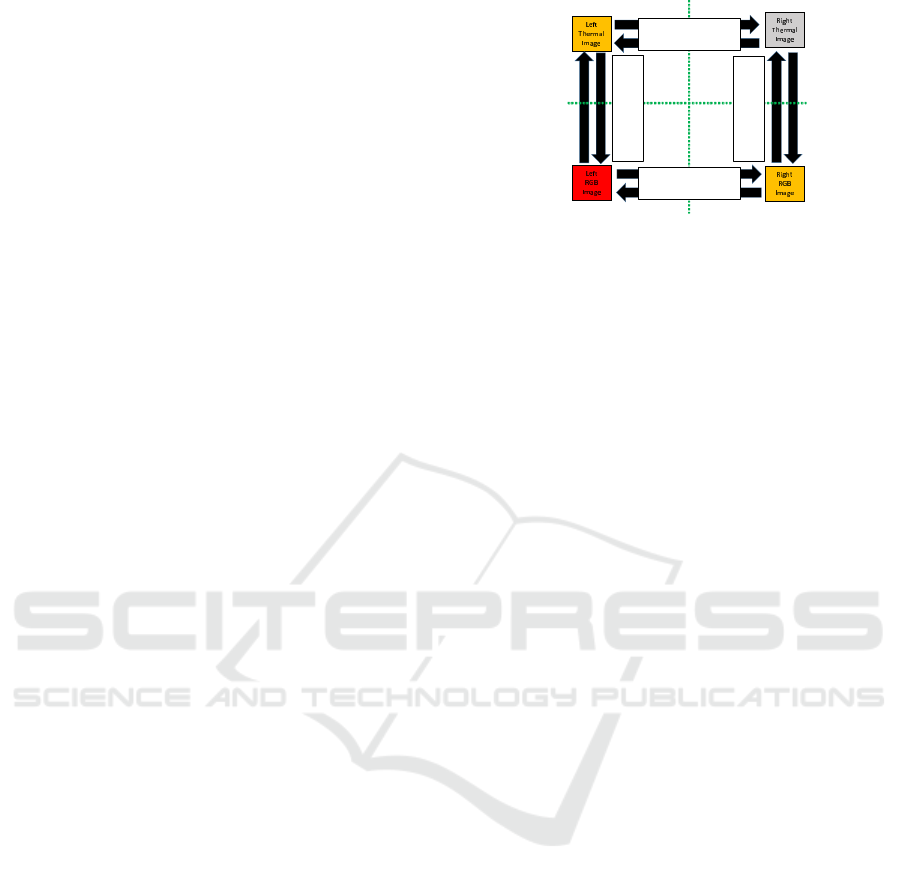
Figure 2: Overview of our proposed network. All networks
are trained simultaneously based on several loss functions.
4 SIMULTANEOUS ESTIMATION
OF IMAGE DISPARITY AND
MODALITY TRANSLATION
4.1 Overview
Let us explain our proposed method in this section.
As described in 1, we have two images that have dif-
ferent modalities and taken from different viewpoints.
In this section, we consider the case when a thermal
image I
T
l
is taken from the left camera, and an RGB
image I
C
r
is taken from the right camera. From these
images, we synthesize a viewpoint changed of modal-
ity translated images
˜
I
C
r
and
˜
I
T
l
, and estimate a dispar-
ity map D.
Figure 2 shows an overview of our proposed
method. As shown in this figure, we utilize a disparity
estimation method shown in 3.1 and image translation
method shown in 3.2. However, these networks can-
not be trained directly in our environment. Therefore,
we define several losses to train the networks and es-
timate results. We explain the losses in the following
sections.
4.2 cGAN Loss
We first define a cGAN loss. This loss evaluates that
the translated image is valid or not by discrimina-
tors for cGAN. Let V
l
(I
l
) and V
r
(I
r
) denote viewpoint
changing by the disparity map D. And let G
C
(I
C
, z)
and G
T
(I
T
, z
′
) denote modality translation from RGB
images to thermal images and thermal images to RGB
images. Discriminators D(I
C
l
, I
T
r
) and D(I
T
r
, I
C
l
) com-
pute probability that the images I
C
l
and I
T
r
are corre-
spond to the images I
T
r
and I
C
l
, respectively. By using
the functions, The cGAN loss is defined as follows:
L
lr1
c
= E[logD(I
T
l
, I
C
r
)]
+E[log(1− D(G
T
(V(I
T
l
), z)))]
+E[kI
C
r
− G
T
(V(I
T
l
), z)k
1
]
(8)
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
556

L
lr2
c
= E[logD(I
T
l
, I
C
r
)]
+E[log(1− D(V(G(I
T
l
, z))))]
+E[kI
C
r
−V(G(I
T
l
, z))k
1
]
(9)
In these losses, a left image is translated to a right
image with the modality translation. In L
lr1
, the
modality of the I
T
l
is translated at first. After that,
the viewpoint is changed from the left to the right.
In L
lr2
, the order of the image transformation is re-
versed. As same as the left to right translation, losses
for the right to left is defined as L
rl1
and L
rl2
. These
losses are very similar to the loss of the cGAN used in
pix2pix because discriminator decides the translated
image is valid or not based on the training images. A
difference from the pix2pix is that the generator in-
cludes viewpoint exchange as well as modality trans-
lation.
4.3 Image Consistency Loss
We next define an image consistency loss. In this loss,
we assume that the translated images should be the
same even if exchanging order is different. Therefore,
we define the loss as follows:
L
lr
i
= E[kV(G(I
T
r
, z)) − G
T
(V(I
T
r
), z)k
1
] (10)
L
rl
i
for the right to left translation is also defined in
this loss.
Furthermore, we assume that synthesized images
in the same modality and the same viewpoint should
be the same even if the original images are different.
For example,
˜
I
T
r
from the I
T
l
by viewpoint exchange
and
˜
I
T
r
from the I
C
r
by the modality translation should
be the same under this assumption. Thus, the second
image consistency loss is defined as follows:
L
i2
= E[kV(I
T
l
) − G
C
(I
C
r
, z)k
1
]
+E[kV(I
C
r
) − G
C
(I
T
l
, z)k
1
]
(11)
4.4 Cycle Loss
We next define a cycle loss. This loss is based on the
loss of the cycle GAN(Zhu et al., 2017). This loss fo-
cus on the similarity between an original image and
a synthesized image by a combination of translation
and inversed translation. In the computation of this
loss, an input image is translated to the different im-
age at first, and back to the original domain by in-
versed translation. By this combined translation, the
input image should be back to the original image if the
translation is valid. That is, the loss can be defined as
follows:
L
T
c
= E[log(D
C
(I
c
r
))]
+E[log(1− D
C
(G
T
(I
T
r
, z)))]
+E[kI
T
l
− G
C
(G
T
(I
T
l
, z), z)k
1
]
(12)
where D
C
denotes a discriminator computing a prob-
ability that the image is the RGB image or not. This
loss is combination of the original GAN and cycle im-
age consistency.
4.5 Attention Loss
As described above, our networks for estimating the
disparity map and modality translation are trained si-
multaneously using a training dataset that is taken in
different modalities and different viewpoints. How-
ever, networks often cannot be trained appropriately.
This is because the image translation networks G have
a significant redundancy. Therefore, the network G
often includes not only modality translation but also
viewpoint changing even if the losses shown in the
previous sections are minimized. If the networks G
include the viewpoint exchange V, we cannot esti-
mate the disparity appropriately.
To avoid this excessive image translation, we de-
fine the attention loss for modality translation. For
the attention loss, we assume that an image region
that includes essential information is the same, even
if the modality of the image is changed. There-
fore, we extract a degree of attention by using Grad-
CAM(Selvaraju et al., 2017) and evaluate the image
translation based on the attentions. The difference be-
tween the Grad-CAM result from each image is used
as the attention loss. Therefore, attention loss is de-
fined as follows:
L
⊣
= E[kA(I
T
l
) − A(V(I
C
r
))k
1
]
E[kA(l
C
r
) − A(V(I
T
l
)k
1
]
(13)
where A denote attention extraction by Grad-CAM.
As this equation indicates, the attention loss does not
include the image translation G, and thus the disparity
exchange V and the image translation G can be sepa-
rated by minimizing the attention loss.
By minimizing all losses mentionedabove, dispar-
ity map estimation and image translation are accom-
plished simultaneously.
5 IMAGE ESTIMATION USING
THE DEEP NEURAL
NETWORKS
We last describe image synthesis techniques using the
deep neural networks trained in the previous sections.
In fact, the disparity map and modality translation re-
sults are not determined uniquely by the described
networks. Because the generator G requires not only
an input image but also noise in a latent space as input
Different Modal Stereo: Simultaneous Estimation of Stereo Image Disparity and Modality Translation
557
(a) IR image (b) RGB image
Figure 3: Examples of input IR and RGB image pair.
data. Thus, the estimated result can changes accord-
ing to the noise z in the latent space.
Therefore, we optimize the noise z in the latent
space to synthesize an appropriate image. In this op-
timization, the losses used for network training can be
used because the losses represent consistencies of the
estimated data. Therefore, we compute the optimized
noise z
∗
which minimizes all the losses with fixed net-
works as follows:
z
∗
= argmin
∑
i
L
i
(14)
where L
i
denote a loss explained in the previous sec-
tion. From the optimized noise z
∗
and input images,
a disparity map and modality translated images are
synthesized. Thus, we accomplish the disparity esti-
mation and the modality translation from the different
modal and different viewpoint image pairs.
6 EXPERIMENTAL RESULTS
6.1 IR Image and RGB Image
In this section, we show several experimental re-
sults. We first show the results when the input im-
age pair is an IR image and an RGB image. In
this experiment, we utilized the PittsStereo-RGBNIR
dataset(Zhi et al., 2018) for training and testing. This
dataset includes stereo pairs of IR images and RGB
images Size of these images is 582× 429. These im-
ages were rectified, and then the epipolar line in the
images are parallelized to the horizontal axis. By us-
ing the rectified images, a disparity map and modality
translated images, i.e., from IR to RGB and RGB to
IR, are estimated by our proposed method. Examples
of rectified input images are shown in Fig.3
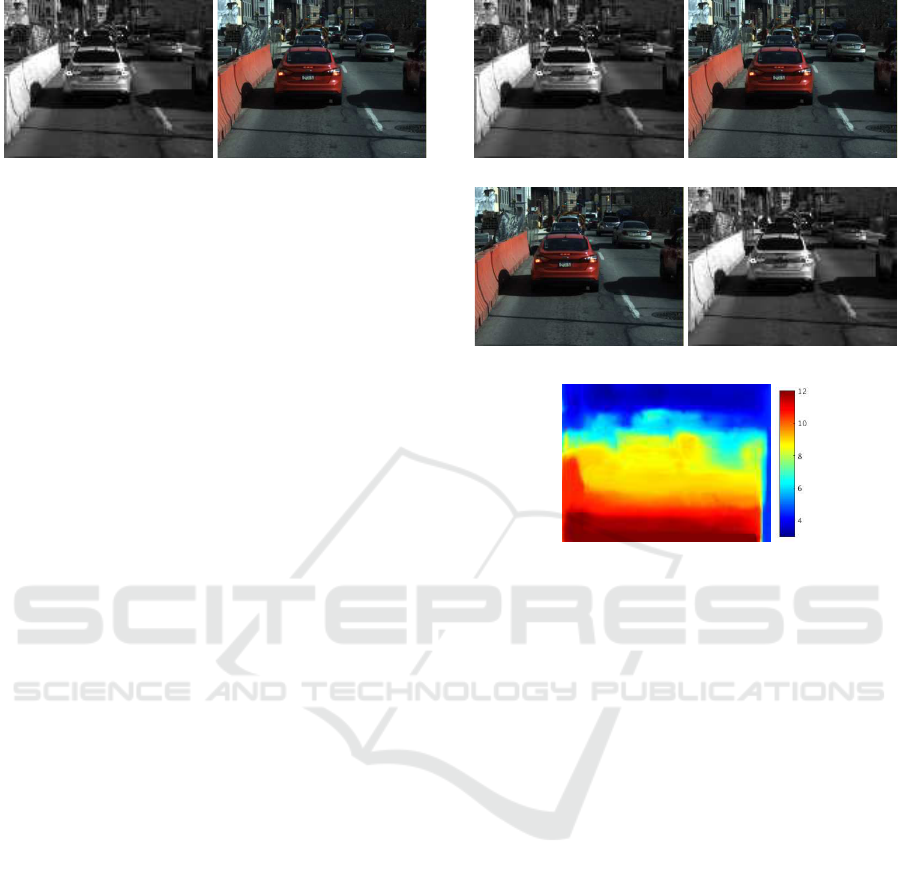
Figure 4 and 5 shows the estimated results by our
proposed method. In this figure, images (a) and (b)
shows input images, and (c) and (d) show modality
translated results by our proposed method. In this fig-
ure, the viewpoints of the images in the same column
are the same. The image (e) shows the estimated dis-
parity. In the disparity image, colors in each pixel
(a) input IR image (b) input RGB image
(c) Trans. RGB image (d) Trans. IR image
(e) Estimated disparity
Figure 4: Input images and estimated results: (a) and (b) are
input images, and (c) and (d) are translated results. The im-
ages in the same column were (virtually) taken in the same
viewpoint. An image (e) shows estimated disparity by color
indicated in the right color bar.
show the value of the disparity, and the values are col-
orized by the right color bar.
In both results, the modality translated images are
pretty good. Positions of the objects in the input im-
age and the translated image are much similar. Fur-
thermore, the translated images are very natural, and
we could not discriminate which image was the trans-
lated image by ourselves. Also, the disparity maps
gradually change according to the depth of the image.
In these images, the upper region of the image has far
depth, and the lower region has close depth. The es-
timated disparity represents the change of this dispar-
ity. Furthermore, the depth of the region, including
the vehicle is different from the other region, and it
indicates that the depth changes by the vehicle.
These results indicate that our proposed method
can estimate the disparity maps and modality trans-
lated images from the IR and the RGB image pair.
6.2 Results from Thermal Image and
RGB Image
We next show the results from thermal images and
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
558
(a) input IR image (b) input RGB image
(c) Trans. RGB image (d) Trans. IR image
(e) Estimated disparity
Figure 5: The other input images and estimated results.
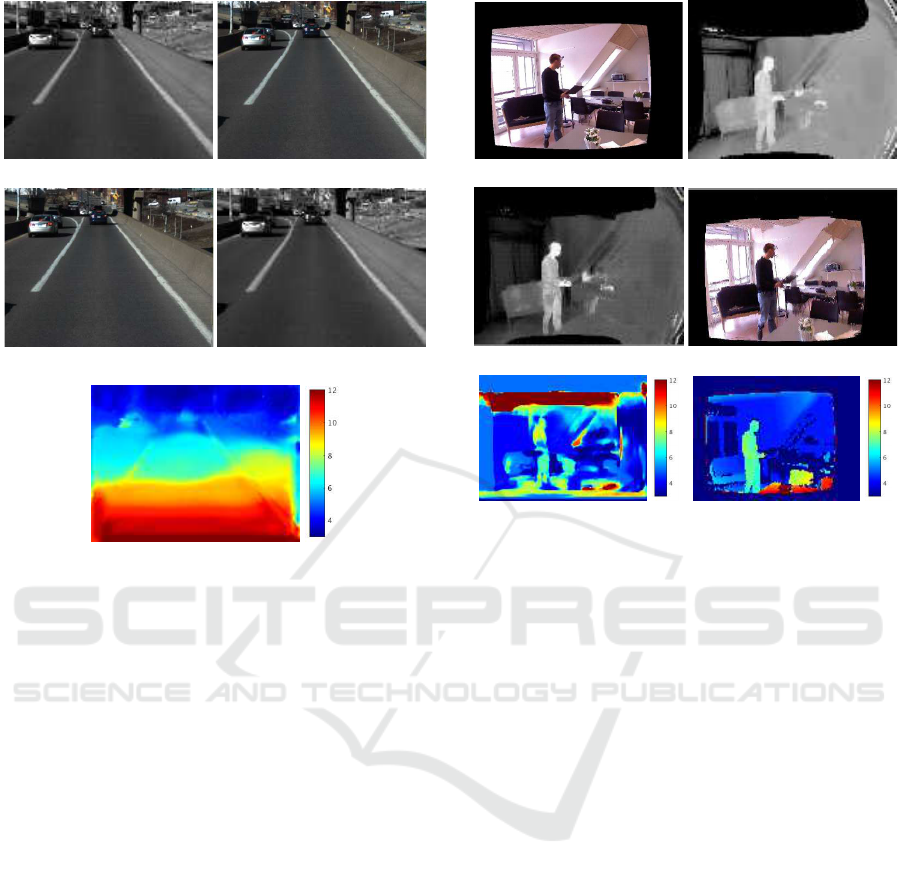
RGB images. In this experiment, we utilized VAP
Trimodal people segmentation dataset(Treible et al.,
2017). The dataset includes pair of thermal images
and RGB images with a disparity of them. Size of
images is 680 × 480. Examples of the input images
are shown in the Fig.6(a), (b).
From these results, we estimated the modality
translated images and the disparity maps. Figure 6
and 7 shows input images and estimated results. As
same as the Fig 4 and 5 image (a) ∼ (e) shows input
images and estimated results. The image (f) shows
the ground truth of the disparity map.
In these results, modality translation makes clear
images in both the thermal to RGB and RGB to ther-
mal. The brightness of the estimated thermal images
is slightly differentfrom the input image. We consider
that the difference was occurred by the difference of
the intensity in each input image. However, the differ-
ence can be suppressed easily by ordinary image pro-
cessing techniques such as brightness normalization.
In the disparity image, several regions have different
disparity from the ground truth. In this region, tex-
tures of the image are very slight, and it might occur
open aperture problems. However, disparities could
be estimated in textured regions and edges of the ob-
jects, and then, our method can estimate the dispar-
ity if the input image provides sufficient information.
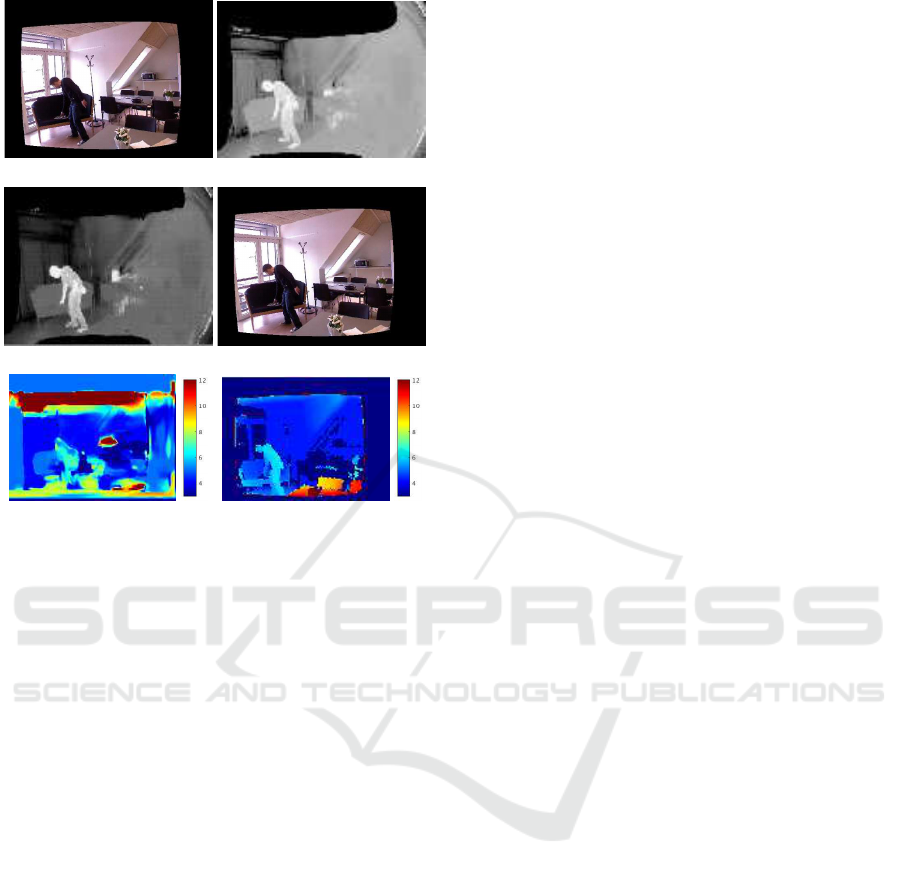
(a) input RGB image (b) input thermal image
(c) Trans. thermal image (d) Trans. RGB image
(e) Estimated disparity (f) Ground truth
Figure 6: Input images and estimated results: (a) and (b) are
input images, and (c) and (d) are translated results. Images
(e) and (f) shows estimated disparity and ground truth, re-
spectively. RMSE between the estimated disparity and the
ground truth was 3.22[pix].
RMSE of the two estimated results were 3.22[pix]
and 3.25[pix]. These values are relatively small to the
whole image disparity. These results indicate that our
proposed method can accomplish simultaneous com-
putation of modality translation and disparity estima-
tion even if the modality of the input image pair is
drastically different.
7 CONCLUSION
In this paper, we propose simultaneous computation
of image modality translation and disparity estimation
from the different modal images based on the neural
networks. In this method, we utilize two kinds of net-
works. The first one is for estimating the disparity,
and the second one is for modality translation. We
define several losses to optimize the network simul-
taneously and appropriately. In addition, we propose
the optimal image synthesis technique by minimiz-
ing the loss functions on the GAN. Several exper-
imental results show that our proposed method can
translate the modality of images and estimate dispar-
ity from the different modal image pairs. Notably,
even if the modalities of the image pair are far from
Different Modal Stereo: Simultaneous Estimation of Stereo Image Disparity and Modality Translation
559
(a) input RGB image (b) input thermal image
(c) Trans. thermal image (d) Trans. RGB image
(e) Estimated disparity
(f) Ground truth
Figure 7: Input images and estimated results. RMSE
between the estimated disparity and ground truth was
3.25[pix].
each other such as RGB and thermal, our method
can estimate modality translated image and disparity.
Although the qualitative evaluation of our proposed
method is good, it is not enough because we cannot
use a sufficient number of images, including ground
truth. Thus, we construct the database for evaluation
and evaluate our proposed method extensively in fu-
ture work.
REFERENCES
Fergus, R., Singh, B., Hertzmann, A., Roweis, S. T., and
Freeman, W. T. (2006). Removing camera shake from
a single photograph. In ACM Transactions on Graph-
ics (TOG), volume 25, pages 787–794. ACM.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. (2017). Image-
to-image translation with conditional adversarial net-
works. In Proc. CVPR2017.
Kiku, D., Monno, Y., Tanaka, M., and Okutomi, M. (2014).
Simultaneous capturing of rgb and additional band im-
ages using hybrid color filter array. In Digital Pho-
tography X, volume 9023, page 90230V. International
Society for Optics and Photonics.
Levin, A., Sand, P., Cho, T. S., Durand, F., and Freeman,
W. T. (2008). Motion-invariant photography. In ACM
Transactions on Graphics (TOG), volume 27. ACM.
Luo, Y., Ren, J., Lin, M., Pang, H., Sun, W., Li, H., and
Lin, L. (2018). Single view stereo matching. In Proc.
CVPR2018, pages 155 – 163.
Monno, Y., Kiku, D., Kikuchi, S., Tanaka, M., and Oku-
tomi, M. (2014). Multispectral demosaicking with
novel guide image generation and residual interpola-
tion. In Image Processing (ICIP), 2014 IEEE Interna-
tional Conference on, pages 645–649. IEEE.
Raskar, R., Agrawal, A., and Tumblin, J. (2006). Coded
exposure photography: motion deblurring using flut-
tered shutter. In ACM Transactions on Graphics
(TOG), volume 25, pages 795–804. ACM.
Selvaraju, R., Cogswell, M., Das, A., Vedantam, R., Parikh,
D., and Batra, D. (2017). Grad-cam: Visual explana-
tions from deep networks via gradient-based localiza-
tio. In Proc. ICCV2017.
Treible, W., Saponaro, P., Sorensen, S., Kolagunda, A.,
ONeal, M., Phelan, B., Sherbondy, K., and Kamb-
hamettu, C. (2017). Cats: A color and thermal stereo
benchmark. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
2961–2969.
Zbontar, J. and LeCun, Y. (2016). Stereo matching by train-
ing a convolutional neural network to compare im-
age patches. Journal of Machine Learning Research,
17(1-32):2.
Zhi, T., Pires, B., Hebert, M., and Narasimhan, S. (2018).
Deep material-aware cross-spectral stereo matching.
In Proc. CVPR2018.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In Proc. ICCV2017.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
560
