
A Least Squares based Groupwise Image Registration Technique
Nefeli Lamprinou, Nikolaos Nikolikos and Emmanouil Z. Psarakis
a
Computer Engineering and Informatics Department, Patras, Greece
Keywords:
Groupwise Registration, Congealign, Image Alignment, Medical Imaging, Multi-modal Alignment,
Self Quotient Image.
Abstract:
Compared with pairwise registration, groupwise registration is capable of handling a large-scale population
of images simultaneously in an unbiased way. In this work we improve upon the state-of-the-art pixel-level,
Least-Squares (LS) based groupwise image registration methods. Specifically, we propose a new iterative
algorithm which outperforms in terms of its computational cost, a recently introduced LS based iterative
congealing scheme. Namely, the particle system that was introduced in that work is used and by imposing its
“center of mass” to be motionless, during each iteration of the minimization process, a sequence of “centroid”
images whose limit is the unknown “mean” image is optimally in closed form defined, thus solving in a
reduced computational cost the groupwise problem. Moreover, the registration technique is properly adapted
by the use of Self Quotient Images (SQI) in order to become capable for solving the groupwise registration of
multimodal images. Since the proposed congealing technique is invariant to the size of the image set, it can be
used for the successful solution of the problem on large image sets with low complexity. From the application
of the proposed technique on a series of experiments for the groupwise registration of face, unimodal and
multimodal magnetic resonance image sets its performance seems to be very good.
1 INTRODUCTION
The problem of image congealing or groupwise align-
ment/registration is an important one within the com-
puter vision community. A good congealing algo-
rithm can be used as preprocessing to notably improve
the performance of other vision tasks within differ-
ent research areas (Liu and Wang, 2014). Compared
to the pairwise registration, groupwise registration is
capable of handling a large-scale population of im-
ages simultaneously in an unbiased way. Specifically,
it eliminates the requirement of choosing a reference
image, thus avoiding a registration bias. Our work
improves upon the most widely recognized area based
LS based state-of-the-art approach. Most area based
state-of-the-art algorithms can be considered (Niko-
likos et al., 2017) as variations of a common base
framework. The basic idea is to use one image at
a time as the held out image and the rest of the en-
semble as the stack. Having done that the goal is
to minimize, in an iterative fashion, an error func-
tion defined over all of the ensemble, by estimating a
warp update for the held out image that aligns it with
the stack. Algorithms based on the aforementioned
a
https://orcid.org/0000-0002-9627-0640
idea include groupwise methods with entropy based
cost functions, such as the algorithms proposed in
(Learned-Miller, 2006), (Zollei, 2006),(Vedaldi and
Soatto, 2006) as well as with LS based cost func-
tions such as the methods proposed in (Cox et al.,
2008),(Cox et al., 2009),(Cox, 2010),(Xue and Liu,
2012). In (Storer and Urschler, 2010) an error func-
tion based on mutual information that copes with pos-
sible variations in appearance between similar objects
of the same class is defined. In addition, in (Huang
et al., 2007) and (Huang et al., 2012) extended en-
tropy based congealing for the usage on real world
complex images is proposed. Recently, in (Huizinga
et al., 2016),(Guyader et al., 2018) groupwise regis-
tration techniques were tailored for the registration of
quantitative MRI datasets. LS based congealing al-
gorithms tend to perform better in terms of conver-
gence rate and accuracy. In the LS case, there are two
ways to align the held out image with the stack using
gradient descend optimization techniques. The first
one, which is known as the forward LS congealing
approach has poor alignment performance, especially
for strong initial misalignments, but has a really low
computational cost. On the other hand the inverse LS
congealing approach that computes a common warp
120
Lamprinou, N., Nikolikos, N. and Psarakis, E.
A Least Squares based Groupwise Image Registration Technique.
DOI: 10.5220/0009180701200127
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
120-127
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

update for all images of the stack by utilizing the in-
verse approach presented in (Cox et al., 2008) out-
performs the forward LS in both accuracy and robust-
ness, but its high computational cost, due to existing
nested loops, makes its use prohibitive for large image
sets as the number of sub-problems grows quadrati-
cally with respect to the image set’s size. Moreover,
additional robustification is needed in order to be able
to handle outliers (Cox, 2010).
The proposed groupwise method improves upon
all the desirable characteristics of the state-of-the-art
inverse method, while maintaining a linear to the set
size computational cost, similar to that of the forward
approach. Moreover, the proposed technique is com-
putationally cheaper than its predecessor (Nikolikos
et al., 2017) where, in each iteration of the algorithm,
the singular value decomposition of the pseudo in-
verse of the Jacobian matrices over the entire ensem-
ble of the images was needed. Finally, the proposed
technique, as well as its predecessor, can be easily
adapted to make use of feature descriptors, instead of
intensity values, as the representation of each image,
as the majority of the unsupervised intensity-based
techniques during the joint alignment process do, in
order to cope with background variations.
The remainder of this paper is organized as fol-
lows: In Section 2, we formulate the image congeal-
ing problem and several issues related with it are ex-
amined. In Section 3, the particle system that was in-
troduced in (Nikolikos et al., 2017) that is strongly re-
lated to the geometric transformations of the image’s
set is reviewed, and the proposed optimal definition
of the ”centroid” image is presented. In Section 4,
the results of the experiments we have conducted are
presented. Finally, Section 5 concludes our paper.
2 PROBLEM FORMULATION
2.1 Preliminaries
Let us consider a set containing N images:
S
i
= {i
n
}
N
n=1
(1)
that belong to the same cluster, that is S
i
contains a
group of similar in shape and aligned images, where
i denotes the column-wise of length N
x
N
y
vectorized
version of size N
x
×N
y
image I. Then, it is well known
that the “mean” image which is defined by:
¯
i
?
=
1
N
N
∑
n=1
i
n
(2)
constitutes the most representative image for the clus-
ter and it can result from the solution of the following
optimization problem:
¯
i
?
= arg min
¯
i ∈ R
N
x
N
y
{
N
∑
n=1
||
¯
i − i
n
||
2
2
} (3)
where ||x||
2
denotes the l
2
norm of vector x.
Let us now consider, apart from the set S
i
, the follow-
ing set:
S
i
w
(P) = {i
w
(p
n
)}
N
n=1
(4)
containing the geometrically distorted vectorized im-
ages of set S
i
of (1) where
P = {p
n
}
N
n=1
, (5)
is a set of N warp parameter vectors. Under the used
warping transformation w( . ; p
n
)
1
, which is param-
eterized by the vector p
n
∈ R
M
, each pixel x of the
Region of Interest of image i
n
of set S
i
is mapped onto
the pixel
ˆ
x of the corresponding image i
w
(p
n
) of set
S
i
w
(P), i.e.:
I
w
(
ˆ
x; p
n
) = I
n
(w(x; p
n
)). (6)
In other words the set S
i
w
(P) is generated by the
following process:
i
1
w(.;p
1
)
−−−−→ i
w
(p
1
)
i
2
w(.;p
2
)
−−−−→ i
w
(p
2
)
.
.
.
.
.
.
.
.
.
i
N
w(.;p
N
)
−−−−→ i
w
(p
N
)
≡ S
i
w
(P) (7)
where, as it was already mentioned, all images belong
to the same cluster, are aligned and the “mean” image
is defined by (2).
Then, congealing, or groupwise registration (Liu
and Wang, 2014) can be defined as the minimization
problem of a misalignment function, let us denote it
by E (P), which is calculated over the set S
i
w
(P), for
a warping function that models the parametric form
of the misalignment to be removed. In general, solv-
ing the image congealing problem is not an easy task
and its complexity heavily depends on several factors,
such as the size of the ensemble and the strongness of
the geometric distortions, to name a few.
Although, in some cases the aforementioned prob-
lem can be easily solved (Nikolikos et al., 2017), in
the general case, its solution results in a highly nonlin-
ear and computationally demanding procedure. This
is basically because the goal of estimating the collec-
tion of the unknown parameters should be achieved
by defining a misalignment function E (P) over the
entire ensemble of images. Such a function, which is
1
In this paper, to model the warping process we are go-
ing to use the class of affine transformations with p
n
∈ R
6
.
A Least Squares based Groupwise Image Registration Technique
121

known as the Cumulative Squared Misalignment Er-
ror (CSME):
E (P) =
N
∑
n=1
ε(p
n
) (8)
where
ε(p
n
) =
N
∑
m=1,m6=n
||i
w
(p
n
) − i
w
(p
m
)||
2
2
, (9)
has all these characteristics and was proposed in (Cox
et al., 2008). However, since the above total cost func-
tion is difficult to be optimized directly (Tong et al.,
2009), the iterative minimization of the individual
cost function ε(p
n
) for each geometrically distorted
image i
w
(p
m
), given an initial estimation of the warp-
ing parameter p
m
, m = 1,2,··· , N, was proposed.
In general, aligning each image of the aforemen-
tioned set with a stack of images, results in a problem
which is heavily depended on the initial conditions
of the average image. This is obvious since indepen-
dently of the blurriness of the basis images, the aver-
age image before the alignment of images is blurred.
Thus, using the average image to control the direction
of the corrections of the parameters, with all the fine
details of the image lost, the algorithm is at the mercy
of the initial conditions (Cox et al., 2008). In order to
avoid this undesired effect, LS congealing avoids us-
ing the mean image and for improving the quality of
the alignment an inverse compositional LS congeal-
ing algorithm was proposed.
However, in the next section we are going to ex-
plore ways of obtaining the alignment of the ensemble
in (4) without having to align all the individual pairs
resulting from it. Instead, we are going to align each
image with the “mean” image, which we are going
to relate with the “centre of mass” of the geometric
transformations set (5).
2.2 A Simplified Misalignment Function
In (Nikolikos et al., 2017) the following total mean
misalignment function:
E
0
(P;
¯
i
?
) =
1
N
N
∑
n=1
||
¯
i
?
− i
w
(p
n
)||
2
2
(10)
where
¯
i
?
denotes the unknown “mean” image, was
proposed. It is clear that the above proposed mis-
alignment function is separable, but is a non linear
function of each member of the set of warp parame-
ters defined in (5). Thus, for each one of the cost func-
tions involved into (10) its minimization requires non-
linear optimization techniques either by using direct
search or by following gradient-based approaches. As
is customary in iterative techniques, the original opti-
mization problem is replaced by a sequence of sec-
ondary optimizations. Each secondary optimization
relies on the outcome of its predecessor, thus gener-
ating a chain of parameter estimates which hopefully
converges to the desired optimizing vector. At each it-
eration, we do not have to optimize the objective func-
tion but an approximation to this function. Assum-
ing that at the k-th iteration of the iterative procedure
p
n
(k) is ”close” to some nominal parameter vector
˜
p
n
,
then we write p
n
(k) =
˜
p
n
+∆p
n
(k), where ∆p
n
(k) de-
notes a vector of perturbations. We recall here that in
order to be able to compute the optimal perturbations
∆p
n
(k), the nominal parameter vector
˜
p
n
as well as
the “mean” image
¯
i
?
must be known. By assigning to
the nominal parameter vector
˜
p
n
the estimation of the
previous iteration, i.e.: p
n
(k − 1) →
˜
p
n
, the optimal
perturbations can be computed as follows:
∆p
n
(k) = A
w
(p
n
(k − 1))(
¯
i
?
− i
w
(p
n
(k − 1))) (11)
where
A
w
(
˜
p
n
(k − 1)) =
(G
w
(
˜
p
n
(k − 1))
T
G
w
(
˜
p
n
(k − 1)))
−1
G
w
(
˜
p
n
(k − 1))
T
(12)
is the M × N
x
N
y
pseudo inverse of the Jacobian ma-
trix G
w
(
˜
p
n
(k − 1)) evaluated at
˜
p
n
(k − 1), (Baker and
Matthews, 2004).
Note however, that since the “mean” image
¯
i
?
is
unknown the optimal values of the perturbations in
(11) can not be computed. Moreover, the use of the
following average of the warped vectorized images:
¯
i
w
(k) =
1
N
N
∑
n=1
i
w
(p
n
(k − 1)) (13)
leading to a similar approach with the forward one,
will have a poor alignment performance (Cox, 2010).
In order to overcome this obstacle, in (Nikolikos et al.,
2017) a particle system was defined and the motion of
each particle was explicitly related with the estimated
values of a corresponding parameter vector during the
iterative procedure of the optimization. We are going
to review this particle system and use it to optimally
define, through a new optimization problem the “cen-
troid” vectorized image.
2.3 The Particle System
Let us consider that each member of set S
i
w
(P) de-
notes the starting position of a particle of mass m =
1/N that can be moved into R
M
. Hence the set S
i
w
(P)
could be considered as a set containing the starting
positions of a system of N isobaric particles. Let
p
n
(k) be the position of the n-th patricle at the k-th
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
122

instant as it moves into R
M
. Then, its trajectory can
be defined with the following position’s set:
T
n
= {p
n
(k), k = 0, 1, 2, · · · }, (14)
with its first and last element p
n
(0), lim
k→∞
p
n
(k) denot-
ing its starting and ending position respectively and
its motion, can be easily expressed by the following
simple motion model:
p
n
(k) = p
n
(k − 1) + ∆p
n
(k), k = 1, 2, ··· , (15)
with the vector ∆p
n
(k) denoting its differential move-
ment.
The position of the center of mass of the whole
particle system, at the k-th instant:
¯
p(k) =
1
N
N
∑
n=1
p
n
(k) (16)
can be used as the origin of the moving coordinate
system. Specifically, the position of the n-th particle
at the k−th instant with respect to the new origin
¯
p(k)
can be expressed as follows:
p
n
(k) =
¯
p(k) + q
n
(k), k = 1, 2, ··· . (17)
Note that the vectors q
n
(k), n = 1, 2,··· , N denote
the positions of the particles in the new coordinate
system and are zero mean, that is:
N
∑
n=1
q
n
(k) = 0. (18)
As the optimization (time) goes on, the position vec-
tors of the particles change with time and thus, in gen-
eral, the center of mass moves too with its velocity
given by:
∆
¯
p(k) =
¯
p(k) −
¯
p(k − 1) =
1
N
N
∑
n=1
∆p
n
(k) (19)
where
¯
p(k),
¯
p(k − 1), k = 1, 2, ··· are the center of
mass of the N− sized particle system at two consecu-
tive instances. Then, according to Proposition 3.1 in
(Nikolikos et al., 2017), the mean geometric transfor-
mation remains the same over the iteration process,
i.e.:
¯
p =
¯
p(k), k = 0, 1,··· (20)
if the total momentum of the particle system is zero,
that is:
∆
¯
p(k) = 0. (21)
This transformation totally specifies the geometric de-
formation of the ”mean” image and we are going to
use it in the next section for defining the ”centroid”
image.
2.4 The “Centroid” Image
To this end, let us define a sequence of vectorized im-
ages:
I
c
= {i(k)}
∞
k=1
, (22)
having the following two properties (Nikolikos et al.,
2017):
• P
1
: The k−th member of the sequence, is the
”centroid” image of the corresponding iteration of
the minimization process
• P
2
: The limit of the sequence is the unknown
”mean” image, that is:
lim
k→∞
i(k) =
¯
i
?
, (23)
and the following average quantities:
A(k) =
1
N
N
∑
n=1
A
w
(p
n
(k − 1)) (24)
b(k) =
1
N
N
∑
n=1
A
w
(p
n
(k − 1))i
w
(p
n
(k − 1)) (25)
¯
∆p(k) =
1
N
N
∑
n=1
∆p
n
(k). (26)
As it is clear from (26),
¯
∆p(k) is the average of the
optimal geometric perturbations at the k−th iteration
of the minimization process. Note also that this av-
erage coincides with the velocity ∆
¯
p(k) of the centre
of mass of the particle system defined in (19). By ex-
ploiting this fact, in the following we define a mean-
ingful optimization problem and use it for optimally
define the “centroid” image.
To this end, let P
k−1
be the set P defined in (5)
containing the values of the parameter vectors result-
ing after the k − 1-th iteration of the minimization
of the non-linear cost function E
0
(P
k−1
;i(k − 1)) de-
fined in (10). Then, for the optimal definition of the
“centroid” image we can define the following con-
strained optimization problem:
min
i(k)
E
0
(P
k−1
;i(k))
subject to: A(k)i(k) = b(k).
(27)
As we are going to see in the next theorem, the
solution of the aforementioned problem differentiates
the “centroid” image from the “mean” one for each
finite value of k while it tends to the “mean” as k → ∞,
thus ensuring that property P
2
in (23) holds.
Theorem 2.1. The optimal solution of the optimiza-
tion problem (27) is given by:
i(k) = (I − A
†
(k)A(k))i
w
(k) + A
†
(k)b(k) (28)
A Least Squares based Groupwise Image Registration Technique
123
where I is the identity matrix of size N
x
N
y
× N
x
N
y
,
A
†
(k) the pseudo inverse of matrix A(k) defined in Eq.
(24) and b(k) the vector defined in Eq. (25) respec-
tively.
Proof. The proof is easy and is left to the reader.
Note that in each iteration the optimal “centroid”
image is the superposition of two components with
each one being associated with an appropriate sub-
space of the space R
N
x
N
y
of the vectorized images.
It can be easily proved that the first component co-
incides with the component i
2
(k) while the second
one with the component i
1
(k) as they were defined
in (Nikolikos et al., 2017). However, we must stress
at this point that its computational cost is very low
as it compared with the solution proposed in (Niko-
likos et al., 2017) where, in each iteration, the Sin-
gular Value Decomposition of matrix A(k) was nec-
essary. Note also that the second component of the
“centroid” image ensures that the Condition (21) is
satisfied.
An outline of the proposed algorithm follows.
Input: Image set S
i
w
(P), the vector
¯
p and the
ROI
Set k = 1
repeat
for n = 1 : N do
Compute the Jacobian of the image
i
w
(p
n
(k − 1))
end
Use (13, 24, 25) to update
¯
i
w
(k), A(k) and
b(k)
Use Eq. (28) to compute the “centroid”
i(k);
for n = 1 : N do
Use (11) to compute the optimal
perturbations ∆p
n
(k) that align
image i
w
(p
n
(k − 1)) to the
“centroid” image i(k) and warp the
image accordingly
end
k = k + 1
until E
0
(P
k−1
;i(k)) has converged;
Output: Image set S
i
Algorithm 1: Outline of the Proposed LS-Centroid
Congealing Algorithm.
3 REGISTRATION OF
MULTI-CONTRAST MR
IMAGES
In this section we are going to present the most com-
mon different modalities of MR Images. Then, the
edge preserving filtering scheme, originally proposed
in (Nikolikos et al., 2019), for their preprocessing will
be shortly explained.
3.1 Multi-contrast MR Images
Unlike imaging using radiation, in which the contrast
depends on the different attenuation of the structures
being imaged, the contrast in MR Images depends on
the magnetic properties and the number of hydrogen
nuclei existing in the area being imaged. The two ba-
sic types of MR Images, often referred to as T 1 and
T 2 images, are T 1-weighted and T 2-weighted im-
ages. The main difference between those types of MR
Images is the timing of the radiofrequency pulse se-
quences that is used to make them. The timing pulse
sequence used for T 1 images results in images which
highlight fat tissue, while the timing pulse sequence
used for making T 2 images results in images which
highlight fat, as well as, water within the body. Un-
like T 1 and T 2 images, Proton Density (PD) images
do not display the magnetic characteristics of the hy-
drogen nuclei, but the number of nuclei in the area
being imaged. Finally, magnetic resonance angiogra-
phy (MRA) is a type of MRI that looks specifically at
the body’s blood vessels.
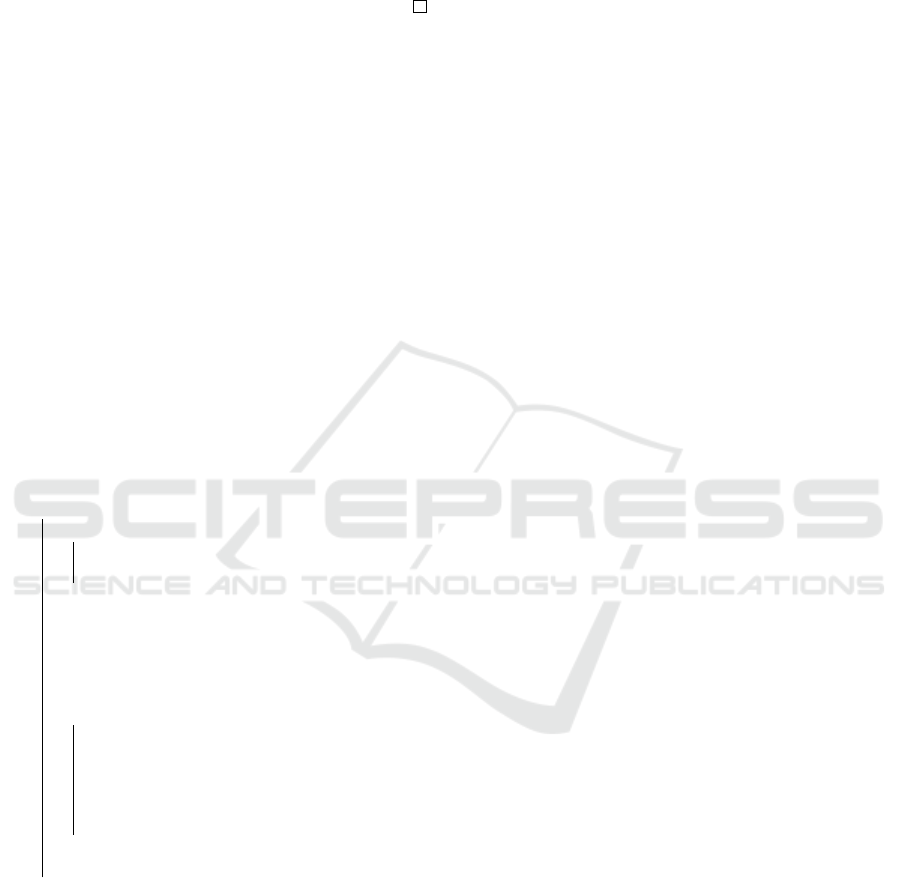
In Figure 1 four slices, one for each aforemen-
tioned MRI type of images, are shown. It is clear that
the different types of MRI images have totally dif-
ferent intensity distributions, a fact that has the same
impact as the strong photometric distortions. Thus,
the use of intensity based techniques for aligning, ei-
ther pairwise or groupwise, multi-modal images does
not constitute a good choice for the solution of the
problem at hand. In order to be able to use such area
based techniques, the preprocessing of the images or
volumes with a known edge preserving filter was pro-
posed (Nikolikos et al., 2019).
3.2 Self Quotient Images
A powerful image processing based technique achiev-
ing invariance to local illumination distortions was
proposed in (Wang et al., 2004) that results, in the
transformation of the image, to the well known SQI.
According to this technique, the SQI is defined as
the ratio of a given image to its smoothed version
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
124
and aims to construct a shadow invariant represen-
tation of the original image. SQI is defined as the
ratio of a given image to its smoothed version aim-
ing to construct a brightness invariant representation
of the initial image. Note that the invariance of that
image’s representation holds for all contrast types of
MR images and volumes, since for both brighted and
no-brighted tissues the ratio effectively removes the
brightness effects. To this end, let I
σ
(x) be a smoothed
version of the image I(x) that results from its convo-
lution with the isotropic Gaussian kernel G
σ
(x), with
the subscript denoting its standard deviation. That is:
I
σ
(x) = I(x) ∗ G
σ
(x) (29)
where “∗” denotes the 2-D convolutional operator.
Suppose also that we are given a set of coordinates
x within the image, which consists the target area or
target. Then, the Self Quotient Image is defined as
follows:
Q(x) =
I(x)
I
σ
(x)
,∀x ∈ T. (30)
Note that the deviation of the Gaussian kernel con-
trols the width of the edges in the image defined in
Eq. (30). To address the noise as well as the out-
liers problem from which SQI suffers from we use
a hard thresholding procedure. Considering pairwise
registration, let σ
Q
r
,σ
Q
w
be the standard deviations of
the vectorized counterparts of SQIs Q
r
(.) and Q
w
(.),
where Q
r
(.) and Q
w
(.) the template and the warped
image respectively. Then, we can define the follow-
ing threshold:
T
µ
= µ min{σ
Q
r
,σ
Q
w
} (31)
with 0 < µ < 1 a parameter that can be used to have
additional control over the value of threshold T
µ
. In all
experiments we have conducted we set µ = 1/2. The
SQIs resulting from the application of the above men-
tioned procedure on the four different contrast type
MRI slices that are shown in Figure 1. In the context
of the group-wise problem, we calculate the threshold
for each pair that consists of an image of the ensem-
ble and the current centroid image. Having filtered
out the strong photometric distortions, we can use the
above mentioned area based technique for solving the
groupwise alignment problem.
4 EXPERIMENTS
In this section we are going to present our results by
applying the proposed technique in a series of exper-
iments on real as well as artificial data. The first ex-
periment is conducted with data from AR database
2
.
2
http://www2.ece.ohio-state.edu/aleix/ARdatabase.
html
Figure 1: (a)-(d): Original T 1, T 2, PD and MRA images
respectively, (e)-(h): The corresponding SQI’s after thresh-
olding for T 1, T 2, PD and MRA images respectively.
The rest of the experiments are conducted with artifi-
cial MRI data obtained from Brainweb Database
3
and
real data from IXI Dataset
4
, to test the alignment of
images of the same or different modalities. In two ex-
periments we also applied artificial warps to the im-
ages. In order to control the strongness of the used
warps applied to the initial images, the framework
presented in (Baker and Matthews, 2004) was used,
with the distortion parameter σ taking various values.
4.1 AR Experiment
Since the groupwise alignment solution proposed de-
rives from the one proposed in (Nikolikos et al.,
2017), in this experiment we replicated the experi-
ment conducted using geometrically distorted images
from AR database, with the distortion parameter σ
taking values in the interval [1,10] with the values 1
and 10 corresponding to the smallest and strongest ge-
ometric distortions respectively. The resulting mean
images confirm that the two techniques have the same
3
https://www.mcgill.ca/bic/software/brainweb-mri-
simulator
4
https://brain-development.org/ixi-dataset/
A Least Squares based Groupwise Image Registration Technique
125
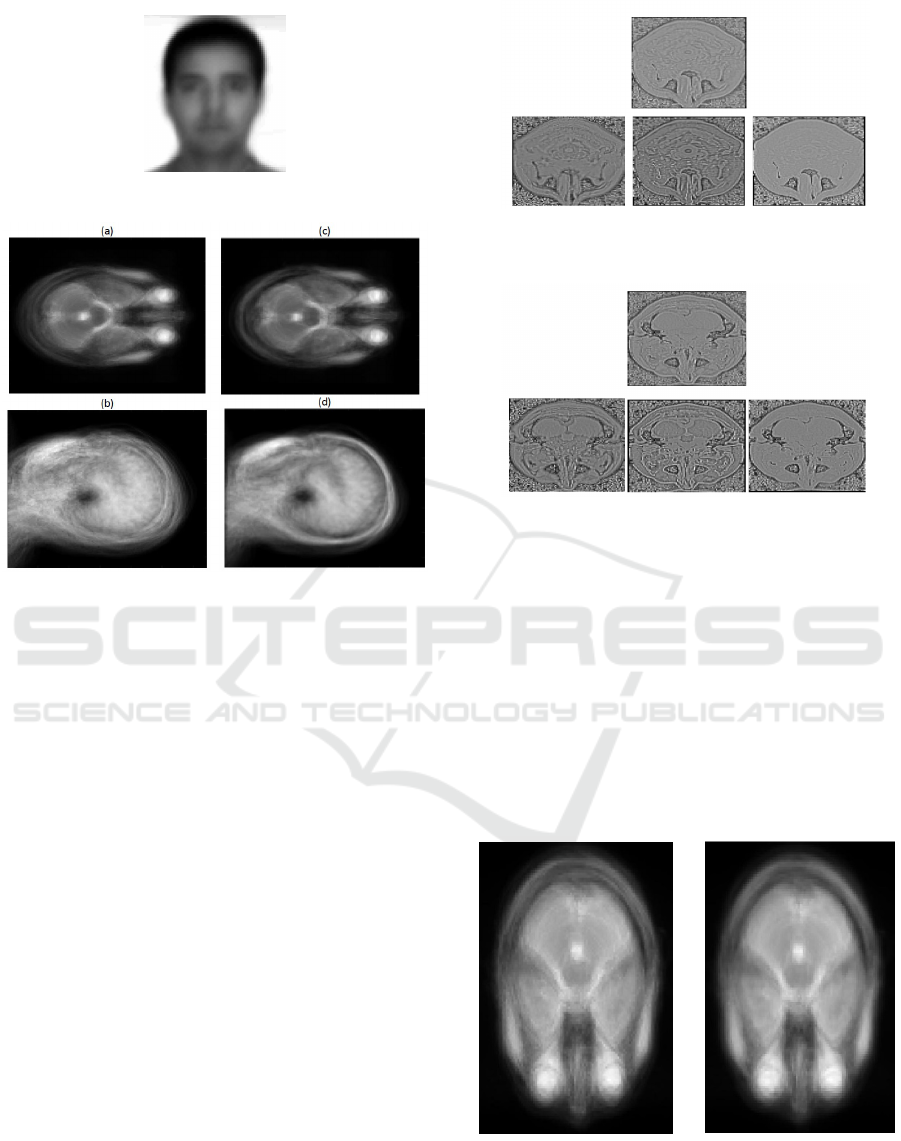
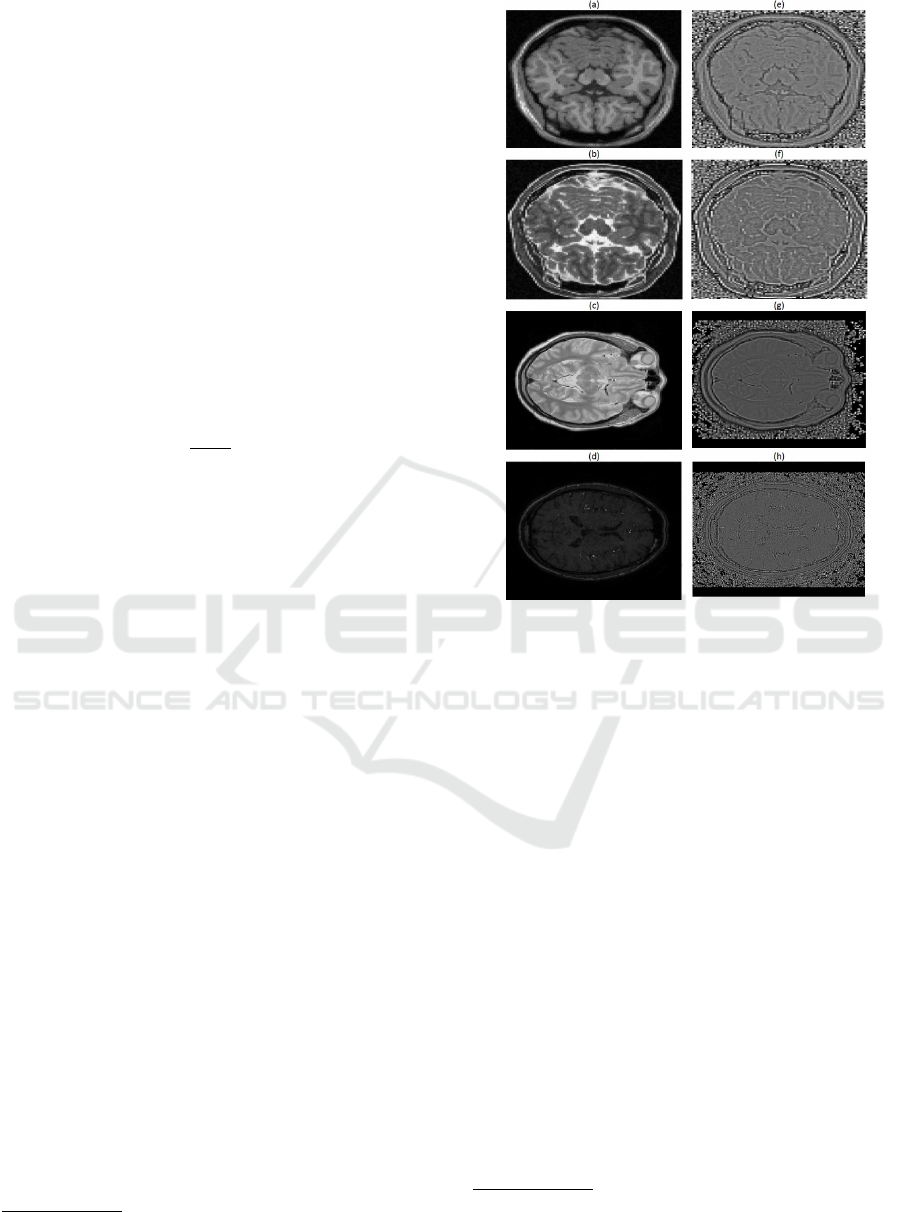
Figure 2: Mean image of 50 images with σ = 4 after align-
ment.
Figure 3: (a): Original mean image of 50 T 2 images, (b):
Original mean image of 50 T 1 images, (c): Mean image of
(a) after alignment, (d): Mean image of (b) after alignment.
performance, as we may see in Figure 2, although the
proposed closed form solution ensures that the latter
is much faster than its predecessor.
4.2 MRI Experiments
We conducted a series of experiments with different
MRI image modalities, namely T1, T 2, PD and MRA.
4.2.1 Unimodal Alignment
First, we aim to align images from IXI Dataset con-
taining the same slice, of the same modality, from 50
different subjects. In Figure 3 we can see the mean
image in T 1 and T 2 cases.
It is obvious in Figure 3 that the contour of the
mean image after alignment is much clearer and more
defined.
4.2.2 Multimodal Alignment in Artificial Data
In this experiment we align images from Brainweb
Database, where we add small artificial warps of σ =
1, aligning then across the same slice different modal-
ities T 1, T 2 and PD. In Figures 4 and 5 we see the
mean image for random slices, as well as the three
aligned images in each case.
Figure 4: Middle Top Image: Mean quotient image of three
below images after alignment, Bottom Row: T 1, T 2 and
PD quotient images respectively.
Figure 5: Middle Top Image: Mean quotient image of three
below images after alignment, Bottom Row: T 1, T 2 and
PD quotient images respectively.
4.2.3 Multimodal Alignment in Real Data
In this experiment we align images from IXI Dataset,
aligning them across the same slice different modali-
ties T 2, MRA and PD. In Figure 6 we see the mean
image for random slices from 28 subjects from each
modality, while in Figure 7 we can see an example
image from each modality, T 2, PD, MRA along with
their respective quotient images which are obviously
the ones that allow multi-modal registration.
Figure 6: Left Image: Original “mean” image of T 2 , MRA
and PD images, Right Image: “mean” image after align-
ment.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
126
Figure 7: Top Row: T 2 image(left) and the respective quo-
tient image(right), Middle Row: PD image(left) and the
respective quotient image(right), Bottom Row: MRA im-
age(left) and the respective quotient image(right).
5 CONCLUSIONS
In this work a recently introduced Least-Squares
based groupwise image registration method was im-
proved in terms of its computational cost. This was
achieved by optimally defining a sequence of “cen-
troid” images whose limit was the desired but un-
known “mean” image for solving the groupwise prob-
lem. In addition, the proposed technique was prop-
erly adapted for its use in the groupwise registration
of multimodal images. The performance of the pro-
posed technique, from its application on a number
of experiments, was very good. The extensive eval-
uation of its performance against other state of the
art groupwise registration techniques and its exten-
sion for solving the corresponding groupwise volume
problem are currently under investigation.
ACKNOWLEDGEMENTS
This research is implemented through the Operational
Program ”Human Resources Development, Educa-
tion and Lifelong Learning” and is co-financed by the
European Union (European Social Fund) and Greek
national funds.
REFERENCES
Baker, S. and Matthews, I. (2004). Lucas-kanade 20 years
on: A unifying framework. International Journal of
Computer Vision 56(3), 221–255.
Cox, M. (2010). Unsupervised alignment of thousands of
images. PhD thesis, Queensland University of Tech-
nology, Brisbane, Queensland.
Cox, M., Sridharan, S., Lucey, S., and Cohn, J. (2008).
Least squares congealign for unsupervised alignment
of images. CVPR.
Cox, M., Sridharan, S., Lucey, S., and Cohn, J. (2009).
Least squares congealign for large number of images.
CVPR.
Guyader, Jean-Marie, Huizinga, Wyke, Poot, J., D. H., van
Kranenburg, Matthijs, Uitterdijk, A., Niessen, W. J.,
and Klein, S. (2018). Groupwise image registration
based on a total correlation dissimilarity measure for
quantitative mri and dynamic imaging data. Scientific
Reports, 8(1):13112.
Huang, G., Jain, V., and Learned-Miller, E. (2007). Unsu-
pervised joint alignment of complex images. In ICCV-
2007.
Huang, G. B., Mattar, M.and Lee, H., and Learned-Miller,
E. (2012). Learning to align from scratch. In Neural
Information Processing Systems.
Huizinga, W., Poot, D. H. J., Guyader, J.-M., Klaassen,
R., Coolen, B. F., van Kranenburg, M., van Geuns,
R. J. M., Uitterdijk, A., Polfliet, M., and et al., J. V.
(2016). Pca-based groupwise image registration for
quantitative mri. Med Image Anal., pages 65–78.
Learned-Miller, E. (2006). Data driven image models
through continuous joint alignment. IEEE T-PAMI,
28(2):236–250.
Liu, Q. and Wang, Q. (2014). Groupwise registra-
tion of brain magnetic resonance images: A review.
Journal of Shanghai Jiaotong University (Science),
19(6):755–762.
Nikolikos, N., Lamprinou, N., Boile, A., and Psarakis, E.
(2019). Multi-contrast mri volume alignment via ecc
maximization. In BioInformatics and BioEngineering
(BIBE). IEEE.
Nikolikos, N., Psarakis, E., and Lamprinou, N. (2017). A
new least squares based congealing technique. Else-
vier Pattern Recognition Letters, 95:58–64.
Storer, M. and Urschler, M. (2010). Intensity-based con-
gealing for unsupervised joint image alignment. In
ICPR, 2010.
Tong, C., Liu, X., Willer, F., and Tu, P. (2009). Automatic
facial landmark labelin with minimal supervision. In
CVPR, 2009.
Vedaldi, A. and Soatto, S. (2006). A complexity-distortion
approach to joint pattern alignment. In NIPS.
Wang, H., Li, S. Z., Wang, Y., and jun Zhang, J. (2004). Self
quotient image for face recognition. In International
Conference on Image Processing (ICIP), pages 1397–
1400. IEEE.
Xue, Y. and Liu, X. (2012). Image congealign via efficient
feature selection. Applications of Computer Vision
(WACV).
Zollei, L. (2006). A Unified Information Theoretic Frame-
work for Pair- and Group-wise Registration of Medi-
cal Images. PhD thesis, MIT Computer Science and
Artificial Intelligence Laboratory.
A Least Squares based Groupwise Image Registration Technique
127
