
Automated Generation of Synthetic in-Car Dataset for Human Body
Pose Detection
Jo
˜
ao Borges
1
, Bruno Oliveira
1
, Helena Torres
1
, Nelson Rodrigues
1
, Sandro Queir
´
os
1,2,3
,
Maximilian Shiller
4
, Victor Coelho
5
, Johannes Pallauf
4
, Jos
´
e Henrique Brito
6
, Jos
´
e Mendes
1
and Jaime C. Fonseca
1
1
Algoritmi Center, University of Minho, Guimar
˜
aes, Portugal
2
Life and Health Sciences Research Institute (ICVS), School of Medicine, University of Minho, Braga, Portugal
3
ICVS/3B’s – PT Government Associate Laboratory, Braga/Guimar
˜
aes, Portugal
4
Bosch Engineering GmbH, Abstatt, Germany
5
Bosch Car Multim
´
edia S.A., Braga, Portugal
6
2Ai - Polytechnical Institute of C
´
avado and Ave, Barcelos, Portugal
Keywords:
Automotive Applications, Synthetic Dataset Generation, Supervised Learning, Human Pose Estimation.
Abstract:
In this paper, a toolchain for the generation of realistic synthetic images for human body pose detection in
an in-car environment is proposed. The toolchain creates a customized synthetic environment, comprising
human models, car, and camera. Poses are automatically generated for each human, taking into account a
per-joint axis Gaussian distribution, constrained by anthropometric and range of motion measurements. Scene
validation is done through collision detection. Rendering is focused on vision data, supporting time-of-flight
(ToF) and RGB cameras, generating synthetic images from these sensors. Ground-truth data is then gener-
ated, comprising the car occupants’ body pose (2D/3D), as well as full body RGB segmentation frames with
different body parts’ labels. We demonstrate the feasibility of using synthetic data, combined with real data,
to train distinct machine learning agorithms, demonstrating the improvement in their algorithmic accuracy for
the in-car scenario.
1 INTRODUCTION
Following recent developments in automated driving
(AD) cars, the future for in-car human interaction and
safety will evolve to a new paradigm. Once the driv-
ing time is out of the equation, most of the time inside
the car will be spent with other types of activities that
should be monitored to predict car-human interactions
and for safety-related procedures (e.g. re-engage in
manual driving). With this new trend, occupant mon-
itoring through human body pose detection gains in-
creased importance in AD. In the last decade, multiple
machine learning approaches have been proposed in
the literature for human body pose detection in RGB
and depth images, showing high inference accuracy
with low computation cost (Shotton et al., 2013; Ro-
drigues et al., 2019; Torres et al., 2019). However,
this type of approach requires a large and generic im-
age database for training. Real datasets are the pri-
mary choice to be used to train every detector. Since
real sensor data is used, such datasets provide inputs
with characteristics similar to those seen during infer-
ence while also providing information about the sen-
sors’ inherent noise model. The recording procedure
is very time consuming and requires a lot of man-
ual interaction, hampering the task of creating a large
and generic dataset. Unlike real datasets, synthetic
datasets can be generated in large quantities and with
higher generalization, allowing to obtain more train-
ing data in less time. However, synthetic images may
suffer from the lack of realism when it comes to mod-
eling the visual sensor noise. Acknowledging that no
publicly available human body pose dataset focus on
the in-car scenario, the main goal of this work was to
develop an automated and user-friendly customizable
toolchain to generate realistic synthetic human body
pose datasets in an in-car environment. The major
novelty of this work is the toolchain itself which com-
prises the following contributions/advantages: realis-
tic synthetic human body pose generation; ability to
customize car, image sensor, car occupants and their
motion profile; and rendering realism is achieved by
550
Borges, J., Oliveira, B., Torres, H., Rodrigues, N., Queirós, S., Shiller, M., Coelho, V., Pallauf, J., Brito, J., Mendes, J. and Fonseca, J.
Automated Generation of Synthetic in-Car Dataset for Human Body Pose Detection.
DOI: 10.5220/0009316205500557
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
550-557
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

image processing techniques to mimic camera’s out-
put.
The rest of this paper is organized as follows. In
section 2, the related work on toolchains for synthetic
dataset generation and depth-based rendering is sum-
marized. In section 3, the overall toolchain method-
ology is presented, also detailing some implementa-
tion considerations of the tools and sensors used. The
potential interest of the proposed toolchain is studied
and discussed in section 4. Finally, the main conclu-
sions are given in section 5.
2 RELATED WORK
Generating data for machine learning methods is an
important task in a wide variety of areas. Data can be
both real or synthetic, with inherent advantages and
disadvantages between them.
Currently, there are several real datasets publicly
available that focus on human body pose. The CMU
Graphics Lab Motion Capture Database (CMU, 2016)
is by far one of the most extensive dataset of pub-
licly available motion capture data. The dataset is
comprised by human body poses that include mark-
ers’ 3D/2D positions and human skeleton data, and
RGB frames. All the information is directly related
to the Vicon system (Vicon, Oxford, UK), both for
the Vicon skeleton template and RGB Vicon cameras.
Currently, there are 2605 trials in 6 categories and 23
subcategories, but unfortunately none of them are re-
lated to in-car scenarios. The HumanEva Dataset (Si-
gal et al., 2010) is another database for human motion
and pose estimation. The toolchain is comprised of
a method of synchronized recording of multiple RGB
video sources and 3D/2D motion capture data. The
similarities between CMU and HumanEva are related
to the human body pose that derives from the Vicon
system. This system gives an accurate body pose, but
unfortunately cannot be used for in-car scenarios due
to occlusions. Within the in-car scenario, Borghi et
al. (Borghi et al., 2017) used the Pandora dataset for
the POSEidon head and shoulder pose estimator. The
Pandora dataset is generated in a laboratory environ-
ment with minimal occlusion, with different subjects
performing similar driving behaviours while seating
on a chair. Head and shoulder orientation were cap-
tured through inertial sensors.
For scenarios where it is hard to generate robust
datasets, such as in-car, or even when a larger quantity
of data is required, there is the alternative to generate
the data synthetically. Varol et al. (Varol et al., 2017)
created the SURREAL dataset and toolchain. The
toolchain can not be seen as a fully synthetic dataset
generation pipeline, because it relies on real motion
capture data. Using the Blender engine (Blender
Foundation, Amsterdam, Netherlands), real motion
capture data from CMU and Human3.6M (Ionescu
et al., 2014) datasets is fitted into a Skinned Multi-
Person Linear Model (SMPL) (Loper et al., 2015),
which is textured and clothed, while the scenery is
comprised of a background image, light and a cam-
era that renders depth, RGB, surface normals, optical
flow (motion blur) and segmentation frames, as well
as ground-truth data for body joint locations (2D/3D).
Outside the in-car human body pose focus, the SYN-
THIA dataset was also created. Ros et al. (Ros et al.,
2016) proposed a virtual world to automatically gen-
erate realistic synthetic images with pixel-level anno-
tations, something that would be extremely time con-
suming if it had to be done manually. The entire ur-
ban scenery is customizable through the Unity engine
(Unity Technologies, San Francisco, USA), including
urban object placement, textures, weather seasons,
time of day and clouds with dynamic illumination en-
gines. Two datasets are generated: 1) the SYNTHIA-
Rand that consists in RGB and labeled frames from
multiple cameras placed in the city and 2) SYNTHIA-
Seqs that simulates multiple depth cameras on top of a
moving virtual car, generating 360
◦
LIDAR data. The
toolchain does not focus in RGB sensor realism, but
instead focuses in the generalization of the scenery
variables, and the automated generation of sensor im-
age and segmentation data for training and evaluation.
For object detection, the VANDAL dataset was devel-
oped (Carlucci et al., 2017). A semi-automatic proce-
dure was used to gather 3D CAD models from Web
resources, allowing to generate depth images for each
one. Object classes were manually queried and down-
loaded from 3D CAD model repositories, making a
total of 319 categories with 30 objects each. Through
the Blender engine and a Python script, depth data
was generated for each object, while increasing the
dataset size by changing object orientation with re-
spect to the camera and its morphology. The last two
toolchains (Loper et al., 2015; Carlucci et al., 2017)
focus on the advantages of 3D engines, such as Unity
and Blender, enabling the access to easily customiz-
able scenes and generation of new data from it. Also
outside the in-car scenario, there are more recent ap-
proaches that make use of the Pandora dataset to ex-
ploit the generation of synthetic depth images through
a GAN approach (Pini et al., 2018) to tackle the head
pose estimation problem. For the same estimation
problem, other methods are able to train only on syn-
thetic images (Liu et al., 2016), however the feature
input is based on RGB images, making it a more rich
feature frame but less robust to light conditions.
Automated Generation of Synthetic in-Car Dataset for Human Body Pose Detection
551

3 TOOLCHAIN OVERVIEW
In this section, the pipeline of the proposed toolchain
is described. The proposed pipeline can be divided
into three conceptual modules, as illustrated in Fig-
ure 1. The first module corresponds to the human
model creation (section 3.1). In this module, dif-
ferent human models are created through the Make-
Human engine (Bastioni, 2001), with the associated
skeleton and skin texture. The second module con-
cerns the scene engine (section 3.2). Using as input
the human models created in the first stage, this mod-
ule is responsible for the initialization of the scene
considering all objects in it (humans, car and cam-
era), followed by the body pose generation for each
human model and associated validation with respect
to collisions. Finally, the third module corresponds
to the rendering phase (section 3.3), where specific
camera frames and human body poses are rendered
taking into account the camera perspective and cus-
tomization. This last module also improves the out-
put data (ToF images and point-cloud) through image
processing procedures (namely using the Neural Style
Transfer [NST] technique (Gatys et al., 2017)). Both
modules (sections 3.2 and 3.3) are based on Blender
and Python programming.
3.1 Human Model Creation
The first step of the proposed toolchain is the creation
of different human models using the MakeHuman en-
gine. The higher the variability of the different human
models, the higher the quality of the dataset, allowing
to give the expected generality for the body pose de-
tection algorithm. This step is fully automated in the
toolchain, as the models are randomly created in the
initialization step and customized through specific pa-
rameters accessible to the user. Each created human
model is comprised of a full body skin mesh, a full
body skin texture, and a body skeleton with 6 degrees-
of-freedom (DoF) per joint. Each human skin tex-
ture is fully segmented according to the different body
parts. This texture is transversal to all body models,
being deformed to fit the different body shapes. The
segmented skin labels have specific RGB color codes,
as illustrated in Figure 2, and are directly related with
human body joints and body segments that represent
joint connectivity.
Figure 1: Overview of the toolchain pipeline.
Figure 2: RGB body part segmentation of the human model.
A total of 30 body part labels are used with specific RGB
color codes, and are directly related with human body joints
and body segments that represent joint connectivity.
3.2 Scene Engine
The scene engine module is responsible for the cre-
ation of the scene to be rendered. This block is subdi-
vided into three different parts, namely initialization,
generation, and validation. This engine uses user in-
put to create the scenes. First, a camera model is cho-
sen, with associated user-defined camera parameters,
namely camera resolution, field of view, position, ori-
entation and axial noise model. A car model is also
given as input to this block, where a realistic 3D car
model with 6DoF is used. Finally, a human motion
profile is defined within the toolchain, where each hu-
man model has a Gaussian motion profile associated
to each of its joints.
Initialization: The first step of the initialization
stage is to position the humans, the camera, and the
car model in the synthetic scenario. Every human
model comes with an unrealistic motion profile, in
which each joint is comprised of 3 axis with ± 180
◦
of range of motion (RoM). Considering the real an-
thropometric constraints of the human body (National
Aeronautics and Space Administration, 2000), the
motion profile is modified.
Generation: After the initialization stage, a new
scene is generated, where the human models per-
form random movements, each human has a user-
customized motion profile that follows a Gaussian
distribution for each joint axis (e.g. µ and σ). For
every new frame generated by the toolchain, a new
pose is sampled from these distributions.
Validation: After the scene has been generated, it
must be validated. The validation process consists in
searching for scene collisions. There are three identi-
fied collision types that need to be considered to gen-
erate realistic datasets. These collision types are illus-
trated in Figure 3. The toolchain automatically checks
for all collisions after generating all poses, in order
to guarantee the realism of the scene and dataset. If
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
552

there are no collisions for all humans, then the dataset
is rendered, otherwise a new scene is generated.
Body to body collisions refer to inner body intersec-
tions (Figure 3a), inspecting the body 3D skeleton
against the human model skin mesh. For this detec-
tion, the toolchain automatically creates a 3D skele-
ton for each human model, using the human model
interior dimensions (joints’ position and segments’
length). Human to human collisions refer to human
intersections (Figure 3b), inspecting the human mod-
els’ skin mesh against each other. Human to car colli-
sions refer to human to car intersections (Figure 3c),
inspecting the human models’ skin mesh against the
car model mesh.
3.3 Rendering
After scene validation, the toolchain renders the
dataset information (Figure 4), including: (1) depth
frames (clean, noise and NST); (2) a 3D point-cloud;
(3) an RGB frame, which adds extra post-processing
effects to the scene; and (4) a body parts’ segmen-
tation frame. Moreover, the 2D and 3D body pose of
each human model is generated and exported to JSON
format.
Clean Depth Frame: The depth frame (Figure 4a)
α
x,y
, x = 1, ...,X, y = 1,...,Y, where X is the camera’s
horizontal resolution and Y its vertical resolution, is a
matrix with the same size as the RGB sensor, where
each pixel information is the distance from the object
on the pixel in the camera XY plane.
Noise Depth Frame: The noise frame (Figure 4b)
is generated using a 2
nd
degree equation model, where
the standard deviation of the error σ
x,y
is related to
the distance of each pixel to the object. This model
is used to generate a Gaussian value for each pixel of
the frame γ
x,y
. The noise model only relates the axial
noise with the depth component, and it does not con-
sider the angle between the surface normal and the
camera axis (Iversen and Kraft, 2017). To use a re-
alistic noise model, we performed a noise regression
to a specific ToF camera (Pico Monstar 105). The
(a) (b) (c)
Figure 3: Collision detection types: (a) body to body, (b)
human to human and (c) human to car.
(a) (b) (c)
(d) (e) (f)
Figure 4: Rendered frames: (a) depth, (b) noise, (c) NST,
(d) labels, (e) RGB and (f) point-cloud. Depth images (a, b,
c) are represented in color for better visualization.
method consisted in placing the camera in front of a
white wall, at D different distances, and recording F
frames for each distance (5 and 100 respectively in
our experiments). The standard deviation of the error
is then calculated for each distance σ
d
, d = 1,...,D,
finally estimating a regression for the model noise us-
ing equation 1. For the specific case of the ToF cam-
era used, we found a = 1, b = 5 and c = 1 as illustrated
in Figure 5.
σ
x,y
= a + b × α
x,y
+ c × (α
x,y
)
2
,
γ
x,y
= Gaussian(σ = σ
x,y
,µ = α
x,y
).
(1)
Additionally, a specific Gaussian noise is added
to abrupt depth edges (identified using an empirical
threshold applied to an edge image computed by cen-
tral finite differences), while a circular crop is applied
to simulate the real ToF images field-of-view (FoV).
NST Depth Frame: The NST frame (Figure 6c) is
generated with a NST method (Gatys et al., 2017).
The toolchain generates a new NST frame β
x,y
for
each synthetic noise frame γ
x,y
, by feeding the net-
work with a real ToF image serving as style x
S
(Fig-
ure 6b), and the synthetic noise frame serving as con-
tent x
C
(Figure 6a). The strategy aims to better in-
fer the noise style and add it into the generated syn-
thetic noise frames (Figure 6c). This frame can be
seen as the most realistic synthetic depth frame from
the toolchain.
0 10 20
0
20
40
60
Noise (mm)
count s
0.73
1.12
1.52
2.07
2.56
(a)
1
1.5
2
2.5
2
4
6
8
Distance (m)
σ
d
(mm)
noise
(b)
Figure 5: Pico Monstar 105 gaussian noise: (a) gaussian
noise σ
d,x,y
for each distance value in plot (b); (b) gaussian
noise regression, noise = a − bz + cz
2
.
Automated Generation of Synthetic in-Car Dataset for Human Body Pose Detection
553

Labels Frame: The labels frame (Figure 4d)
labels
x,y
, is a matrix with the same size of the RGB
sensor, where each pixel information is the RGB color
code from the object projected on the pixel. Note that
no post-processing effects (such as ray-tracing, am-
bient occlusion, ambient light, shadowing) are used,
giving a raw RGB code of the projected texture and
preserving the human models’ segmented skin (Fig-
ure 2).
RGB Frame: The RGB frame (Figure 4e) RGB
x,y
,
is a matrix similar to the labels frame but with the
added post-processing effects, thus improving scene
realism. Also, the toolchain automatically switches
the human models skin texture with a realistic one be-
fore rendering. This skin is preselected by the user for
each human model, in the GUI.
Point-cloud: The 3D point-cloud (Figure 4f) has
the Cartesian coordinates xyz of the voxel that was
projected in each pixel, pcx
i
, pcy
i
, pcz
i
, i = 1,..., X ×
Y . As mentioned before, Blender does not give this
information in a simple and straightforward way. The
toolchain relies on the information of the NST depth
frame β
x,y
, the camera’s resolution (X and Y ), and its
horizontal field-of-view, H
FoV
, to calculate each voxel
position with respect to its pixel projection (Equation
2).
pcx
i
= β
x,y
×
x −
X
/2
×
tan(
H
FoV
/2)
(
X
/2)
,
pcy
i
= β
x,y
×
y −
Y
/2
×
tan(
H
FoV
/2)
(
X
/2)
,
pcz
i
= β
x,y
,
(2)
Ground-truth: The ground-truth information
(black skeleton lines in Figure 4) consists in export-
ing the pose information for each human model, with
respect to the camera. With that in mind, we have
2 types of ground-truth: 2D pose for depth, labels
and RGB frames; and 3D pose for the point-cloud.
Both types of ground-truth consist in the same pose
information for each human model, that is a structure
comprised of all joints’ pixel (2D) or voxel (3D)
positions.
(a) (b) (c)
Figure 6: NST frames: (a) content, (b) style, and (c) result-
ing NST-based synthetic image.
4 EXPERIMENTAL EVALUATION
To understand the validity of the data being generated
with our toolchain, as well as its ability to increase
ML algorithmic accuracy, we defined four distinct ex-
perimental scenarios: 2D pose estimation from depth
images; 2D pose estimation from point-cloud; 3D
pose estimation from 2D pose; human body parts seg-
mentation from depth images.
To provide the experimental scenarios with valid
datasets that allow us to evaluate the advantage of
combining synthetic and real data, we require both
real and synthetic samples. In this sense, we used a
publicly available dataset MoLa R10k InCar Dataset
(Borges et al., 2019), plus the synthetic dataset gen-
erated by the proposed toolchain. The real dataset
consists in three recorded subjects (S), two redun-
dant actions (A) each, totaling 10482 samples. In its
turn, the synthetic dataset comprises data generated
using seven car models (N
cm
) and eighteen subjects
(Z) with associated Gaussian poses (N
hgp
), totalling
25200 samples. Both datasets are identical in terms
of sample data types for depth frame, point-cloud, 2D
and 3D body pose, giving us the opportunity to eval-
uate the three first experimental scenarios in a quanti-
tative way. Lack of real in-car body parts’ segmenta-
tion frames in publicly available datasets led us to de-
fine a qualitative evaluation for the fourth experiment.
The available samples were divided into 3 groups: (1)
a training set, with all synthetic samples plus 6946
real samples (corresponding to subjects S1 and S2);
(2) a validation set with 900 real samples; and (3) a
test set with 2636 samples. Groups (2) and (3) use
samples from subject S3 performing distinct actions.
To assess the influence of the ratio between real and
synthetic images and the influence of the number of
real images available, we trained each network with
different amounts of samples, establishing ten sub-
evaluations (R1 to R10) for each of the first three ex-
periments (Table 1). To account for the stochastic na-
ture of the training, each sub-evaluation was repeated
3 times, using a different set of samples, with the met-
rics being averaged over the 3 trained models. For R8
to R10, due to lack of new samples for the different
folds, the training was repeated thrice upon shuffling
the samples.
2D Pose Estimation from Depth Images (EV1):
To evaluate the synthetically generated depth frames
and corresponding 2D ground-truth, the Part Affinity
Fields (Cao et al., 2017) method was used. From it,
a custom CNN was implemented consisting only on
the first stage of the original PAF CNN. In each sub-
evaluation, R#, the method used the depth frame as
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
554
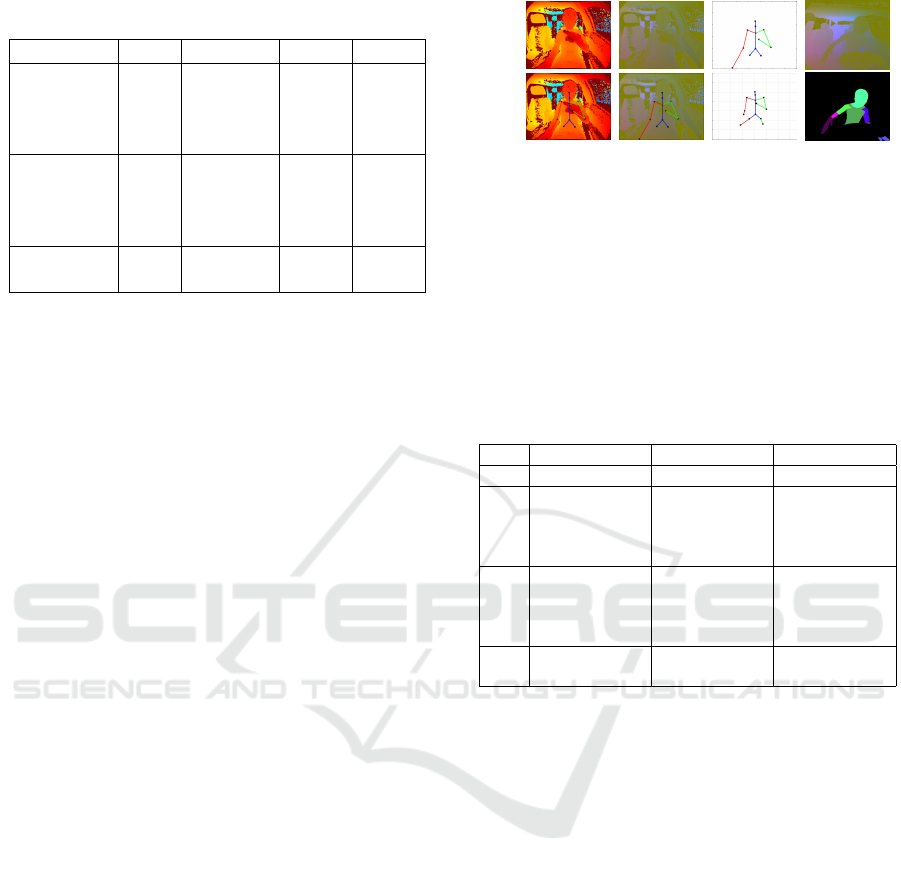
Table 1: Evaluations related with real and synthetic data
quantities/ratios.
Evaluation Real Synthetic Total Ratio
R1 900 0 900 1:0
R2 900 2700 3600 1:3
R3 900 4500 5400 1:5
R4 900 9000 9900 1:10
R5 1800 0 1800 2:0
R6 1800 5400 7200 2:6
R7 1800 9000 10800 2:10
R8 1800 18000 19800 2:20
R9 6946 0 6946 7.7:0
R10 6946 25200 25200 7.7:28
input features (raw depth for real dataset, NST depth
for synthetic dataset) and the 2D body pose as output
labels (Figure 7). In this experiment, the PCKh mea-
sure (in pixels, using a matching threshold given by
50% of the head segment length) and the Area Un-
der Curve (AUC) were used as metrics (Andriluka
et al., 2014). Table 2 summarizes the average results
for the full body. Figure 8a presents the PCKh@0.5
values for the full body for each sub-evaluation. We
demonstrate the interest in including synthetic data
in ML training, showing PCKh improvements in al-
most all sub-evaluations when adding synthetic data.
However, some sub-evaluations showed that higher
ratios would induce overfitting to synthetic data (e.g.
R2 > R3 > R4, R7 > R8).
2D Pose Estimation from Point-cloud (EV2): To
evaluate the synthetically generated point-cloud and
corresponding 2D ground-truth, the Part Affinity
Fields (Cao et al., 2017) method was used. In this
experiment, the point-cloud was used as input fea-
tures (raw point-cloud for real samples and NST-
based point-cloud for synthetic samples). To this end,
each point-cloud was normalized and converted into a
3-channel matrix. The same metrics from EV1 were
employed. Results are shown in Table 2, and Figure
8b. In this experiment we experience the same ob-
servations as in EV 1, except overfitting, e.g. addition
of synthetic samples seem to always improve accu-
racy. Interestingly, EV 2 achieved higher AUC values
then EV 1, meaning more detections for a lower nor-
malized distance. These observations may be related
with the link between increased complexity of the in-
put and the need for larger number of training sam-
ples to induce overfitting to synthetic data. In the end,
for the in-car 2D body pose estimation problem, we
achieved higher PCKh@0.5 total score in R10 (i.e.
full dataset training) of 91.97% and corresponding
AUC of 63.61%.
EV1 EV2 EV3 EV4
Feature (Input)
Label (Output)
Figure 7: Visual representation of input features and out-
put used for each experimental scenario EV #: (EV1) 2D
pose estimation from depth images using normalized depth
frame as input and 2D body pose as output; (EV2) 2D pose
estimation from point-cloud using normalized point-cloud
as input and 2D body pose as output; (EV3) 3D pose estima-
tion from 2D pose using 2D body pose as input and 3D body
pose as output; and (EV4) human body parts segmentation
from point-cloud images using normalized point-cloud as
input and segmentation frame as output.
Table 2: PCKh measure and AUC values averaged over all
14 joints, for the 3 experimental scenarios and all 10 sub-
evaluations.
EV1 EV2 EV3
PCKh AUC PCKh AUC PCKh AUC
R1 13.47 4.42 39.57 19.62 79.93 25.58
R2 86.6 41.46 89.58 62.36 90.89 35.37
R3 74.04 35.15 87.99 66.55 91.76 33.06
R4 64.79 33.57 90.67 69.05 92.95 37.53
R5 74.77 36.80 89.97 54.98 79.09 22.34
R6 83.82 38.45 91.00 67.86 91.74 31.49
R7 85.17 42.37 90.89 64.71 92.72 32.26
R8 60.18 29.05 89.79 63.57 93.64 38.64
R9 88.62 50.25 90.32 54.52 92.74 29.78
R10 87.66 41.30 91.97 63.61 95.55 39.72
3D Pose Estimation from 2D Pose (EV3): To eval-
uate the synthetically generated 3D ground-truth, a
3D pose estimation method (Martinez et al., 2017)
was used. The method uses a 2D body pose as in-
put features (provided as joint pixel coordinates) and
the 3D body pose as output (Figure 7). Once again,
similar metrics were employed, but in this case PCKh
matching threshold was normalized to a fixed head
size of 200 mm. Results are shown in Table 2, and
Figure 8c. Similar improvements with added syn-
thetic samples were observed as in EV 2. We achieved
higher PCKh@0.5 total score in R10 with 95.55% and
AUC of 39.72%.
Human Body Segmentation from Depth Images
(EV4): To evaluate the synthetically generated
point-cloud and corresponding segmentation frames,
the U-net (Ronneberger et al., 2015) method was used
(Figure 9). The method was implemented in two
stages, where the first stage (St
1
) inferes the human
silhuete from the background to then mask the input
image features that are then used on the second stage
Automated Generation of Synthetic in-Car Dataset for Human Body Pose Detection
555
0 0.1 0.2 0.3 0.4
0.5
0
10
20
30
40
50
60
70
80
90
100
Normalized distance
Detection rate %
(a)
0 0.1 0.2 0.3 0.4
0.5
0
10
20
30
40
50
60
70
80
90
100
Normalized distance
Detection rate %
(b)
0 0.1 0.2 0.3 0.4
0.5
0
10
20
30
40
50
60
70
80
90
100
Normalized distance
Detection rate %
R1
R2
R3
R4
R5
R6
R7
R8
R9
10
(c)
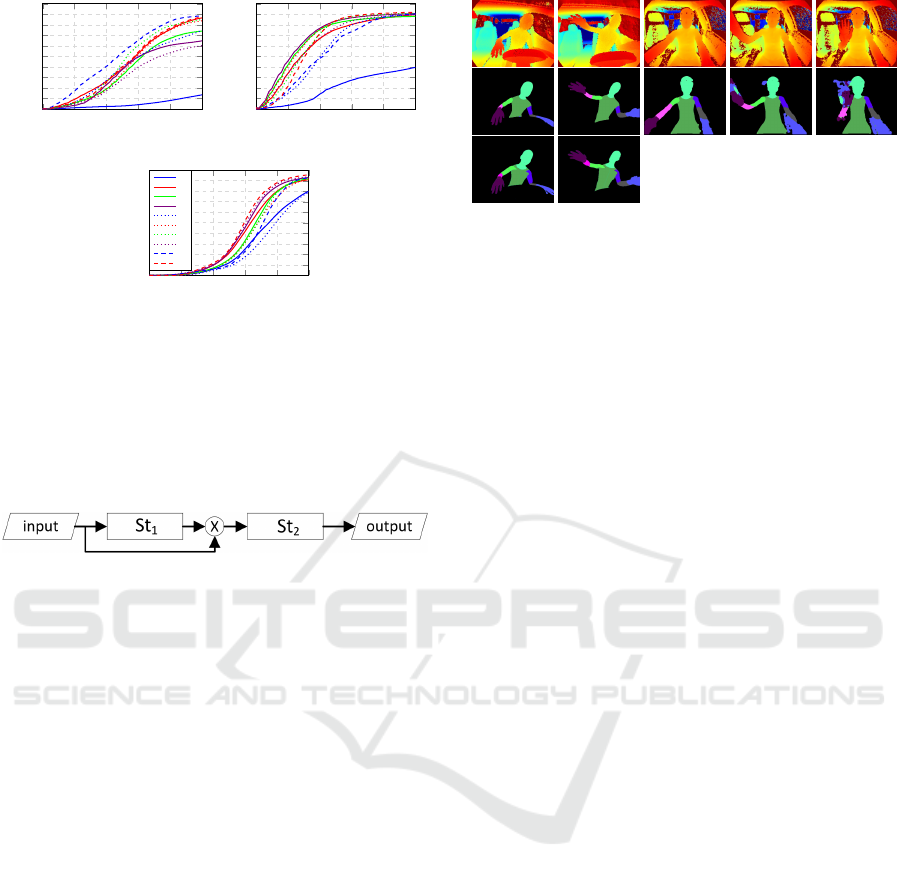
Figure 8: PCKh total for all sub-evaluations, R#, and the
three first experimental scenarios, EV #: (a) 2D pose esti-
mation from depth images (EV1); (b) 2D pose estimation
from point-cloud (EV2); and (c) 3D pose estimation from
2D pose (EV3). Color gradient represents synthetic data
increase with constant real data. Continuous, dashed and
dotted lines represent increasing amounts of real samples
(for the same real-synthetic ratio).
Figure 9: Inference pipeline for the experimental scenario
EV4. Normalized point-cloud is used as input for the first
U-Net stage (St
1
) and then masked with its output. The sec-
ond U-Net stage (St
2
) uses the masked input and inferes the
body parts’ labels.
(St
2
) to infere the human body parts. The method
uses the NST point-cloud as input features and the
labels frame as output labels (Figure 7). For all sam-
ples, the point-cloud was normalized and converted
into a 3-channel matrix, while each labels frame was
converted into a grayscale frame with 8 body parts.
Evaluation is done qualitatively (in both unseen syn-
thetic samples and real images) and results are shown
in Figure 10. We showed that pure synthetic train-
ing is still capable of achieving good results in real
data, however requiring increased method complex-
ity to cope with lack of noise realism in synthetic
data. Notwithstanding, from the results obtained for
EV 1 to EV 3 (mix of real with synthetic samples), it
is expectable a noticeable improvement if a few real
samples are included during training (which was not
available in the present experiments due to lack of
ground-truth labels).
5 CONCLUSIONS
In this work, a novel toolchain for the generation of
realistic synthetic images for human body pose de-
Figure 10: EV4 visual representation: first row represents
the point-cloud input features (representated in depth frame
to improve understanding); middle row represents infered
body parts’ segmentation; and bottom row represents the
label frame. The first two columns represent synthetic sam-
ples from the MoLa S25k InCar Dataset (not used in train-
ing), while the last three columns represent real samples
from the MoLa R10k InCar Dataset (no label frames avail-
able).
tection in an in-car environment is presented. The
toolchain demonstrated its potential for increased al-
gorithmic accuracy during body pose estimation in an
in-car scenario.
In terms of scene realism several considerations can
be made for improvements in future work, as dis-
criminative algorithms seem to improve their accu-
racy proportionally to the training data realism. In this
regard, ToF noise characterization or the used NST
methods can be improved, as well as the RGB image
rendering. The ability to synthetically recreate human
behaviour would be another important feature, enlarg-
ing the applicability of our dataset towards other mon-
itoring tasks (like action recognition). Hereto, fusion
of real human motion capture data with synthetic sce-
narios could be employed. However, issues such as
collision detection between animated models and syn-
thetic car models would have to be handled. Besides
the currently supported pose and segmentation maps,
another relevant output to be added would be the gaze
for each human model.
ACKNOWLEDGEMENTS
This work is supported by: European Structural
and Investment Funds in the FEDER component,
through the Operational Competitiveness and Interna-
tionalization Programme (COMPETE 2020) [Project
n
o
039334; Funding Reference: POCI-01-0247-
FEDER-039334].
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
556

REFERENCES
Andriluka, M., Pishchulin, L., Gehler, P., and Schiele, B.
(2014). 2D human pose estimation: New benchmark
and state of the art analysis. In Proceedings of the
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition.
Bastioni, M. (2001). Makehuman, Open Source tool for
making 3D characters.
Borges, J., Queir
´
os, S., Oliveira, B., Torres, H., Rodrigues,
N., Coelho, V., Pallauf, J., Henrique Brito, J., Mendes,
J., and C. Fonseca, J. (2019). MoLa R10k InCar
Dataset.
Borghi, G., Venturelli, M., Vezzani, R., and Cucchiara,
R. (2017). POSEidon: Face-from-Depth for driver
pose estimation. Proceedings - 30th IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2017, 2017-Janua:5494–5503.
Cao, Z., Simon, T., Wei, S. E., and Sheikh, Y. (2017).
Realtime multi-person 2D pose estimation using part
affinity fields. Proceedings - 30th IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2017, 2017-Janua:1302–1310.
Carlucci, F. M., Russo, P., and Caputo, B. (2017). A
deep representation for depth images from synthetic
data. Proceedings - IEEE International Conference
on Robotics and Automation, pages 1362–1369.
CMU (2016). CMU Dataset @ mocap.cs.cmu.edu.
Gatys, L. A., Ecker, A. S., Bethge, M., Hertzmann, A., and
Shechtman, E. (2017). Controlling perceptual factors
in neural style transfer. In Proceedings - 30th IEEE
Conference on Computer Vision and Pattern Recog-
nition, CVPR 2017, volume 2017-Janua, pages 3730–
3738.
Ionescu, C., Papava, D., Olaru, V., and Sminchisescu, C.
(2014). Human3.6M: Large scale datasets and pre-
dictive methods for 3D human sensing in natural en-
vironments. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 36(7):1325–1339.
Iversen, T. and Kraft, D. (2017). Generation of synthetic
Kinect depth images based on empirical noise model.
Electronics Letters, 53(13).
Liu, X., Liang, W., Wang, Y., Li, S., and Pei, M. (2016).
3D head pose estimation with convolutional neural
network trained on synthetic images. Proceedings -
International Conference on Image Processing, ICIP,
2016-Augus:1289–1293.
Loper, M., Mahmood, N., Romero, J., Pons-moll, G., and
Black, M. J. (2015). SMPL : A Skinned Multi-Person
Linear Model. ACM Trans. Graphics (Proc. SIG-
GRAPH Asia), 34(6):248:1—-248:16.
Martinez, J., Hossain, R., Romero, J., and Little, J. J.
(2017). A Simple Yet Effective Baseline for 3d Hu-
man Pose Estimation. In Proceedings of the IEEE In-
ternational Conference on Computer Vision.
National Aeronautics and Space Administration (2000).
Anthropometry and Biomechanics. Man-Systems In-
tegration Standards NASA-STD-3000, 1(1):16–45.
Pini, S., Grazioli, F., Borghi, G., Vezzani, R., and Cuc-
chiara, R. (2018). Learning to generate facial depth
maps. Proceedings - 2018 International Conference
on 3D Vision, 3DV 2018, pages 634–642.
Rodrigues, N., Torres, H., Oliveira, B., Borges, J., Queir
´
os,
S., Mendes, J., Fonseca, J., Coelho, V., and Brito, J. H.
(2019). Top-down human pose estimation with depth
images and domain adaptation. In VISIGRAPP 2019
- Proceedings of the 14th International Joint Con-
ference on Computer Vision, Imaging and Computer
Graphics Theory and Applications, volume 5, pages
281–288.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical im-
age segmentation. Lecture Notes in Computer Sci-
ence (including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics),
9351:234–241.
Ros, G., Sellart, L., Materzynska, J., Vazquez, D., and
Lopez, A. M. (2016). The SYNTHIA Dataset: A
Large Collection of Synthetic Images for Semantic
Segmentation of Urban Scenes. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), (600388):3234–3243.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2013).
Real-time human pose recognition in parts from single
depth images. Studies in Computational Intelligence,
411:119–135.
Sigal, L., Balan, A. O., and Black, M. J. (2010). HumanEva:
Synchronized video and motion capture dataset and
baseline algorithm for evaluation of articulated human
motion. International Journal of Computer Vision,
87(1-2):4–27.
Torres, H. R., Oliveira, B., Fonseca, J., Queirós,
S., Borges, J., Rodrigues, N., Coelho, V., Pallauf, J.,
Brito, J., and Mendes, J. (2019). Real-Time Human
Body Pose Estimation for In-Car Depth Images. In
IFIP Advances in Information and Communication
Technology, volume 553, pages 169–182. Springer
New York LLC.
Varol, G., Romero, J., Martin, X., Mahmood, N., Black,
M. J., Laptev, I., and Schmid, C. (2017). Learn-
ing from synthetic humans. Proceedings - 30th IEEE
Conference on Computer Vision and Pattern Recogni-
tion, CVPR 2017, 2017-Janua:4627–4635.
Automated Generation of Synthetic in-Car Dataset for Human Body Pose Detection
557
