
AutoPOSE: Large-scale Automotive Driver Head Pose and Gaze Dataset
with Deep Head Orientation Baseline
Mohamed Selim
1
, Ahmet Firintepe
2
, Alain Pagani
1
and Didier Stricker
1
1
German Research Center for Artificial Intelligence (DFKI), Trippstadter Str. 122, Kaiserslautern, Germany
2
BMW Group, Munich, Germany
https://autopose.dfki.de
Keywords:
Driving, Head Pose Estimation, Deep Learning, Infrared Camera, Kinect V2, Eye Gaze.
Abstract:
In computer vision research, public datasets are crucial to objectively assess new algorithms. By the wide
use of deep learning methods to solve computer vision problems, large-scale datasets are indispensable for
proper network training. Various driver-centered analysis depend on accurate head pose and gaze estimation.
In this paper, we present a new large-scale dataset, AutoPOSE. The dataset provides ∼ 1.1M IR images taken
from the dashboard view, and ∼ 315K from Kinect v2 (RGB, IR, Depth) taken from center mirror view.
AutoPOSE’s ground truth -head orientation and position- was acquired with a sub-millimeter accurate motion
capturing system. Moreover, we present a head orientation estimation baseline with a state-of-the-art method
on our AutoPOSE dataset. We provide the dataset as a downloadable package from a public website.
1 INTRODUCTION
Public datasets have tremendously pushed forward
computer vision research in the recent years. Ob-
jective comparisons of new algorithms on exact same
data is essential for assessing contributions. In addi-
tion, since the rise of deep learning methods, large-
scale datasets have become crucial to realize research
and development.
There is a large interest in car interior human-
centered applications, such as driver attention mon-
itoring, driver intention prediction, and driver-car in-
teraction. All these technologies requires as basis the
head pose and gaze of the driver. The head pose de-
scribes the head position and orientation in the car,
whereas the gaze is the direction of the driver’s view.
Recent datasets provide either head pose or gaze
or have an automotive context. However, none of
them contains the combination of all of them. Thus,
we propose AutoPOSE, which is the first dataset pro-
viding combined driver head pose and gaze for in-car
analysis.
In more detail, our contributions are:
• We provide a large-scale, accurate, driver head
pose and eye gaze dataset.
• The dataset contains images acquired from two
different camera positions in our car simulator and
provides different image types: dashboard (IR,
∼ 1.1M ) and center mirror (RGB, Depth, IR,
∼ 315K each).
• All frames are annotated of the dataset with
information about driver’s activity, accessories
(glasses) and face occlusion.
• We provide baseline results for head orientation
estimation task where we evaluate POSEidon net-
work on our dataset.
In the remainder of the paper, we discuss the related
work on head pose estimation and on latest head pose
datasets in section 2. We present our new dataset in
section 3, and explain in detail how we acquired it in
section 4. We discuss and evaluate the head orienta-
tion estimation algorithm on our dataset in section 5.
In section 6, we conclude and summarize our work.
2 RELATED WORK
2.1 Related Datasets
In 2017, two new head pose datasets were introduced,
the DriveAHead (Schwarz et al., 2017) and Pandora
(Borghi et al., 2017). The DriveAHead proposed a
novel head reference system (or head coordinate sys-
tem), defining where the head center is, and how the
Selim, M., Firintepe, A., Pagani, A. and Stricker, D.
AutoPOSE: Large-scale Automotive Driver Head Pose and Gaze Dataset with Deep Head Orientation Baseline.
DOI: 10.5220/0009330105990606
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
599-606
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
599
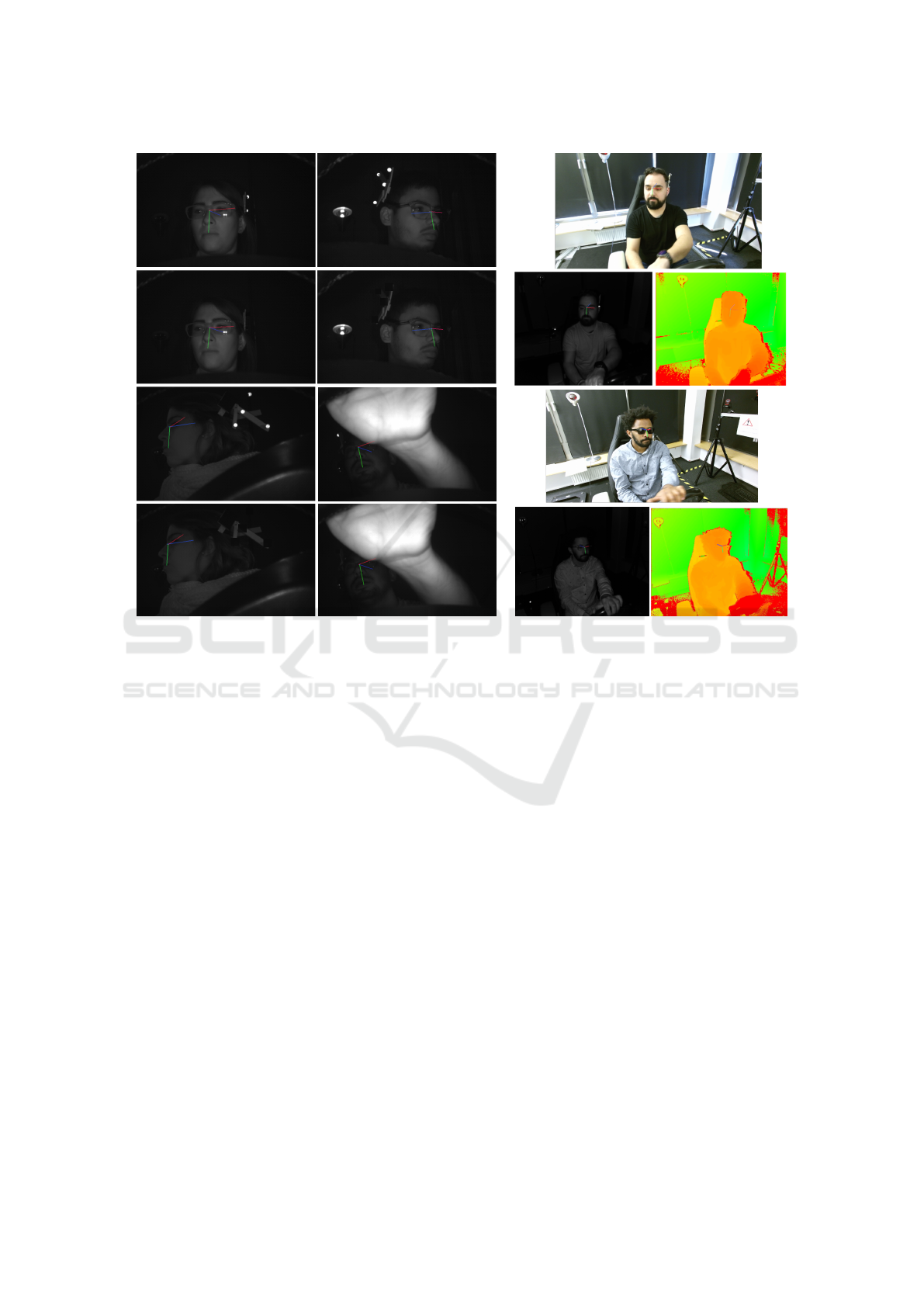
(a) IR Camera - Dashboard (b) Kinect v2 - Center rear mirror
Figure 1: (a) Row 1: RAW images with head target reflective markers visible, Row 2: post-processing - markers covered.
Second column shows gaze annotation lamp(b) Kinect color, IR, and depth(color mapped) images. Note: Intensity was
improved for visibility and printing purposes.
x, y, and z-axis of the head are defined related to spe-
cific facial landmarks. We also use the same head ref-
erence system in our AutoPOSE dataset. The DriveA-
Head provided IR and depth frames from a Kinect
camera in a real driving scenario. The authors did not
provide accuracy measures of the motion capturing
system while driving, although the motion of the car
will affect the tracking system calibration accuracy.
The dataset is suitable for deep learning frameworks.
Pandora (Borghi et al., 2017) is a large scale
dataset that is also suitable for deep learning frame-
works. However, the authors did not specify a head
reference system (head center and rotation axis). In
addition, the subjects were acting to be driving on a
normal chair in front of a wall. In our AutoPOSE,
we provide data captured in a real car cockpit with
cameras placed at the dashboard and the center mir-
ror location. Moreover, we use a well-defined head
reference coordinate system.
In 2015, the MPIIGaze (Zhang et al., 2015)
dataset was introduced containing RGB images only.
The subjects were gazing at known points at a com-
puter screen. As RGB cameras are highly affected
by sunlight, they are not suitable for driving scenarios
(Schwarz et al., 2017). In our AutoPOSE, we provide
IR images from two perspectives (dashboard, center
mirror) with 3D gaze target ground truth in a driving
environment.
In summary, all existing datasets have specific
drawbacks. AutoPOSE provides ground truth in a
controlled environment, that ensures ground truth cor-
rectness and quality. Moreover, we provide frame
annotations were the subjects performed the required
task while having no glasses on, with clear glasses on
and with sunglasses on. All frames were manually
annotated. The dataset provides two camera views
(dashboard, and center mirror) in a car cockpit with
gaze target ground truth and occlusion annotations.
2.2 Head Pose Estimation
Approaches for head pose estimation are performed
either on 2D information like RGB (Baltrusaitis et al.,
2018; Ranjan et al., 2019), or IR images (Schwarz
et al., 2017), or on 3D information like depth maps
(Borghi et al., 2017; Borghi et al., 2018). The selec-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
600

tion of the suiting input type depends also on the cate-
gory of an approach. Three main categories have been
defined to classify approaches: feature-based, 3D
model registration and appearance-based approaches
(Fanelli et al., 2011; Meyer et al., 2015; Borghi et al.,
2017). Feature-based approaches need defined facial
features like eye corners or mouth corners, which are
then localized in frames to perform pose estimation.
These approaches can work on 2D as well as 3D infor-
mation. In (Barros et al., 2018), two different feature-
based approaches have been combined to regress head
pose, the approaches being defined facial landmarks
on the face and keypoints computed by motion. The
approach requires 2D images only.
3D model registration derives a head model from
the data and regresses a head pose depending on the
derived 3D information. This can be done based on
2D and 3D or both. (Papazov et al., 2015) uses facial
point clouds and matches them with possible poses.
Appearance-based approaches take the whole in-
formation provided into consideration and try to
regress a pose. They are generally learning-based
methods. This can be either a raw 2D image or a depth
map, as in the DriveAHead-approach (Schwarz et al.,
2017). The DriveAHead-approach uses both, 2D-IR-
images and depth information to regress a pose. The
POSEeidon-framework (Borghi et al., 2017; Borghi
et al., 2018) uses 3D-information only to derive other
types of information like motion and grayscale image
to regress the 3D orientation.
The baseline method we use in this paper is based
on deep neural networks, which has proven to have
high potential for the head pose estimation task as
shown by (Borghi et al., 2017; Borghi et al., 2018;
Ahn et al., 2015; Ahn et al., 2018), however, requir-
ing large amounts of data.
3 AutoPOSE DATASET
We introduce a new headpose and eye gaze dataset.
We captured our images using two cameras placed
at two different positions in the car simulator in our
lab. One camera, is an IR-camera placed at the dash-
board of the car, and targeted at the driver. The sec-
ond camera is a Kinect v2 placed at the location of
the center miror of the car providing 3 image types,
[IR, depth (512x424 pixels)], and RGB (1920x1080)
images. The dataset consists of 21 sequences. Our
21 subjects were 10 females and 11 males. The dash-
board IR camera was running at 60 fps, giving in total
1,018,885 IR images. The Kinect was running at 30
fps, giving in total 316,497 synchronized RGB, depth,
and IR images.
Figure 2: Driving simulator at our lab. The red circles high-
lights some of the motion capture system cameras.
It was not possible to capture the data using both
cameras at the same time, because the strong IR light
emitted by the Kinect was affecting the image cap-
tured by the camera located at the dashboard. Conse-
quently, we decided to capture the data first with the
dashboard IR camera, then capture with the Kinect.
In each capturing sequence, the subject was asked to
perform the tasks listed in Table 1. First, the subject
was instructed about all the tasks required. The sub-
ject performed pure rotations as much as possible, fol-
lowed by free natural motion, with and without face
occlusions using his/her hand. Later, the gaze tasks
which are described later in detail in subsection 4.5.
All tasks were first performed without any glasses
on the face of the subject. Later on, all tasks were
performed again with clear glasses on, then with sun-
glasses on. After acquiring the data with the dash-
board camera, the whole experiment was repeated
again using the Kinect camera while turning the dash-
board IR camera off. It is noted that the subjects were
faster in performing the tasks again for the Kinect se-
quence, thus leading to less frames for the Kinect se-
quence. Also, 4 Kinect sequence were discarded due
to technical issues that lead to invalidating them. All
tasks for all of our 21 subjects were manually anno-
tated stating the start/end frame, along with the task
performed, and glasses existence with its type.
3.1 Head Coordinate System
As introduced in subsection 2, existing datasets have
different head coordinate system definition. In other
words, when treating the head as a rigid body, it is
required to define the x, y, and z axis of the head,
and the head center. In our dataset we decided to fol-
low the head coordinate system definition proposed
in (Schwarz et al., 2017), which adds more consis-
tent data to the community. The definition, requires
AutoPOSE: Large-scale Automotive Driver Head Pose and Gaze Dataset with Deep Head Orientation Baseline
601
Table 1: Number of frames per annotation of the IR-Dashboard camera.
No glasses Clear glasses Sunglasses Neck scarf Total
Pure yaw rotation 12k 12.5k 13.5k 11.7k 50k
Pure pitch rotation 12k 11.7k 12.6k 11k 47.5k
Pure roll rotation 13k 12k 12.5k 11k 48.5k
Free natural motion 374k 153k 158k 22k 705k
Free natural motion - Hand near face actions 40k - - - 40k
Gaze point 1 - Left mirror 7.2k 6.5k 6.7k - 20.5k
Gaze point 2 - Right mirror 7.6k 7k 7k - 21.6k
Gaze point 3 - Dash board 7.5k 7.2k 7.5k - 22.2k
Gaze point 4 - looking forward at the road 7.3k 6.6k 7.1k - 21.1k
Gaze point 5 - Back mirror 6k 6.8k 7.1k - 19.9k
Gaze point 6 - Media center 7.4k 6.6k 6.6k - 20.6k
495k 230k 238k 55k 1M
8 landmarks on the face, which are four eye corners,
two nose corners, and two mouth corners. The head
center is the 3D mean point of the four eye corners.
The The x-axis is defined to be the 3D vector that
starts at the head center, and passes between the left
eye corners. The y-axis is computed as follows. The
3D mean point of the two nose corners and two mouth
corners is projected on the plane whose norm is the x-
axis. The projected point and the head center define
the y-axis of the head. Finally, the z-axis is the cross
product of the x and y axis.
4 DATA ACQUISITION
In order to acquire reliable and accurate ground truth
for AutoPOSE, we used a sub-millimeter accurate
motion capturing system, the OptiTrack, which con-
sists of 12 Flex13 IR cameras, running at 120 fps.
We calibrated the system using the Motive software
of OptiTrack. At the beginning of each recording, the
system was calibrated by waving a calibration wand
that has three markers at known distances. The cali-
bration sequence is used to estimate the intrinsics and
extrinsics of each camera in the setup. The system
tracks the reflective markers and provides the 3D po-
sition and orientation of the defined rigid bodies.
In our dataset, the subject put on a rigid tool con-
taining 8 reflective markers at the back of the head, we
refer to it as the head target. The calibration software
computed a mean 3D error for the markers tracking of
0.32 mm. We also attached 8 markers to the IR cam-
era at the dashboard, and also 8 markers to the Kinect
v2 camera. In the tracking software, we set the rigid
bodies to be tracked only if all markers are visible and
tracked. This ensures the most accurate tracking pos-
sible of the subject head and the cameras.
By applying image processing and projecting
known 3D head target marker locations on the 2D
images, we erase the markers in order not to provide
more realistic images for learning. Figure 1 (a) shows
pictures with and without the markers.
4.1 System Synchronization and
Calibration
In this section, we describe in details our system syn-
chronization and calibration, which allows us to have
the subject’s head pose (orientation and translation)
with respect to the camera coordinate system for each
frame.
In order to synchronize the images of the cameras and
the tracking information, the cameras and the track-
ing system were running on the same computer. The
captured images were saved along with the timestamp
of the computer. Also, the tracking information from
OptiTrack were saved on the same machine along
with the timestamp. This enabled us to synchronize
the images with the 3D information. Since, the track-
ing system is running at 120 Hz and the cameras are
running at 60 Hz (dashboard IR) and 30 Hz (Kinect),
we were able to select the best matching 3D informa-
tion for each frame in the dataset. The average differ-
ence between the time stamps is max 5 ms.
4.2 Camera - Handeye Calibration
We placed spherical reflective markers on the cam-
era body, thus in each frame we get the position and
orientation of the camera body in our reference co-
ordinate system. Our aim is to find the head pose,
described as orientation and translation in the camera
coordinate system. Consequently, the rigid transfor-
mation between the camera body (defined by our re-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
602
OptiTrack - OT
Head Target - hTarget
Head - h
Camera Marker -
cMarker
Camera - c
𝐻
ℎ→ℎ𝑇𝑎𝑟𝑔𝑒𝑡
𝐻
ℎ𝑇𝑎𝑟𝑔𝑒𝑡→𝑂𝑇
𝐻
𝑂𝑇→𝑐𝑀𝑎𝑟𝑘𝑒𝑟
𝐻
𝑐𝑀𝑎𝑟𝑘𝑒𝑟→𝑐
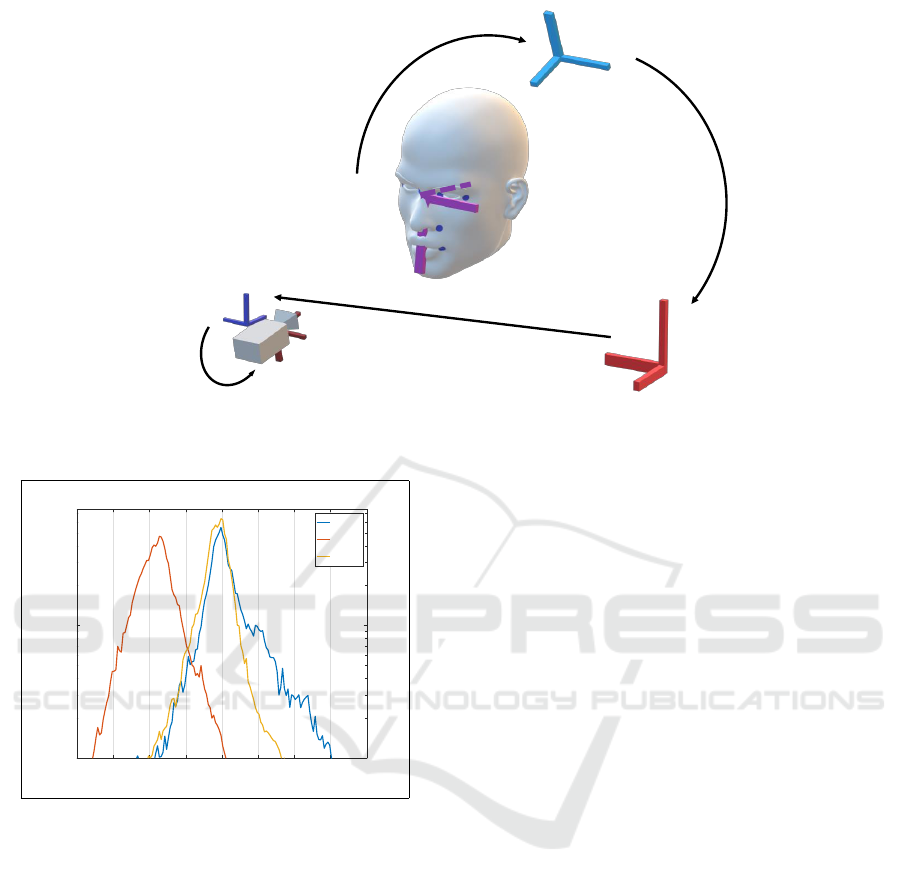
Figure 3: (a) 3D demonstration of the setup coordinate systems. (b) Sample image showing the subject wearing the head
target, Kinect at the center mirror position, and gaze annotation IR lamp at the back.
-80 -60 -40 -20 0 20 40 60 80
Angle in degrees
10
3
10
4
Number of frames
Yaw
Pitch
Roll
Figure 4: AutoPOSE yaw, pitch, and roll angles histogram.
flective markers as a rigid body in OptiTrack), and the
camera coordinate system must be computed.
We used the handeye calibration algorithm (Tsai
and Lenz, 1989) to find the required rigid transforma-
tion. We attached spherical reflective markers to both
cameras (IR, and Kinect). We calibrated our two cam-
eras with 50 images. The re-porjection error is 2.19
pixels for the IR camera. The error for the Kinect
v2 RGB camera is 3 pixels, and 2.3 pixels for the
Kinect’s IR camera.
4.3 Head Calibration
In order to compute subject-specific head reference
system, he/she puts on the head target, so that it rests
at the back of the head, and does not occlude any part
of the face. The experiment coordinator puts on the
subject’s 8 special facial markers from OptiTrack at
the designated positions mentioned before. We record
with OptiTrack a calibration sequence of 1 min where
the subject rotates his/her head in yaw, pitch, and roll
directions.
We compute for each frame the head coordinate
system, and find the rigid transformation from the
head coordinate system to the head target. Finally,
we compute the average transformation among all
frames. This defines our subject-specific head calibra-
tion. The facial markers are removed, and the subject
is now ready for recording the dataset sequence.
In order to compute the calibration error, we use
the calibration sequence. We consider the computed
head reference system as ground truth. We apply the
computed transformation on the head target, this gives
us the recovered head pose. The calibration error in is
as small as 1.02 mm for translation and 1.6 degrees
for the orientation.
4.4 Head Pose
Finally, in order to find the head pose (translation and
orientation) in the camera coordinate system, we track
the head target and the camera rigid bodies in each
frame. We apply transformations in this order
H
h→c
=H
cMarker→c
· H
OT →cMarker
· H
hTarget→OT
· H
h→hTraget
(1)
Figure 4 shows the histogram of the yaw, pitch
and roll angles of the 1M frames from the dashboard
IR camera. The rotations were limited to -90 degrees
to +90 degrees. As shown, the pitch angle histogram
AutoPOSE: Large-scale Automotive Driver Head Pose and Gaze Dataset with Deep Head Orientation Baseline
603
is shifted in the negative values of the rotation angles.
This is due to the placement of the camera in the dash-
board, where it is looking at the face from the bottom,
check Figure 1 (a).
4.5 Eye Gaze
In our dataset, we provided annotation for gaze
frames. We asked our subjects to gaze at six spher-
ical reflective markers placed at driving-related loca-
tions, the dashboard, in front of the driver (represent-
ing looking at the road), center mirror, 2 side mirrors,
and center of the car (representing media center, cli-
mate control). The car markers are tracked by Opti-
Track throughout the entire sequence. We asked the
subject to gaze at each marker for 5 to 10 seconds.
We think that the best person to tell if he/she is
gazing at a point or not is the person him/herself. We
placed a button close to the subject. When the subject
gazes at a marker, he/she press the button, which turns
an IR lamp at the back, visible in the frame, and does
not interfere with the camera’s IR light. Later, we
manually annotated the start and end frame for each
gaze target. The ground truth gaze targets can be used
to in gaze estimation algorithms assessment in auto-
motive or other fields. To the best of our knowledge,
this is the first time to provide gaze target ground truth
in automotive field using IR camera from dashboard
and from center mirror views.
5 HEAD ORIENTATION
ESTIMATION BASELINE
We used the POSEidon-CNN on the IR data to per-
form head pose estimation. Before training, we con-
ducted preprocessing on the raw images for cleaning
and obtaining cropped images of the frames. As a
first dataset preparation step, we cleaned the 752x480
pixel images of the IR camera. We kept the frames
with yaw rotations higher than 120 degrees for train-
ing to increase robustness, but did not consider them
in the validation and test set. We additionally equalize
and normalize the images.
The authors of (Borghi et al., 2017) and (Borghi
et al., 2018) rely on the output of a neural network to
regress 2D head position, which they further use for
cropping. This outputs the head center in image co-
ordinates (x
H
, y
H
). We obtained the head center from
the ground truth data instead of a neural network. This
prevents having additional error in the pose estima-
tion part introduced through another position estima-
tion method. A dynamic size algorithm provided the
head bounding box with the acquired head center, the
32
60
Conv1
32
26
Conv2
32
10
Conv3
32
3
Conv4
128
1
Conv5
1
128
fc1
1
84
fc2
1
3
output
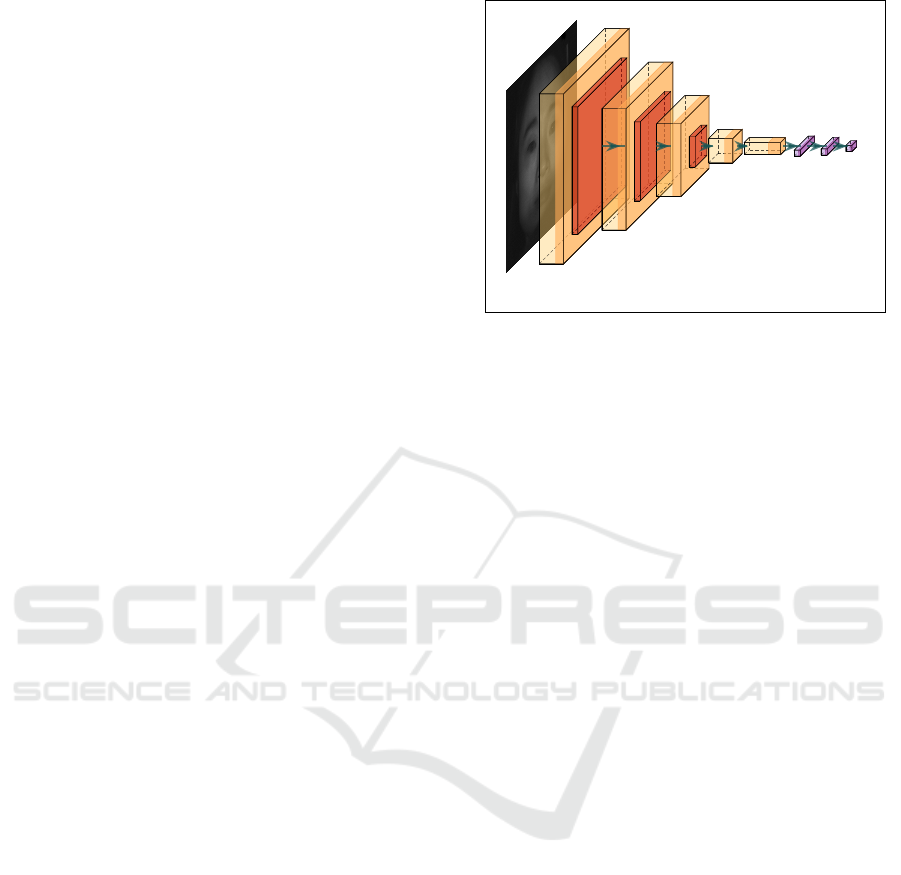
Figure 5: The POSEidon-CNN (Borghi et al., 2018) for 64
pixel images.
width w
H
and the height h
H
, which are used to crop
the frames. We acquired them as described in (Borghi
et al., 2017). With the horizontal and vertical focal
lengths of the acquisition device, distance D between
the head center and the acquisition device and R
x
and
R
y
, which are the average width and height of a face.
The head width R
x
and height R
y
in 3D were defined
uniformly as 32 cm, so the head is equal in size inside
the cropped images. Moreover, if more than a third of
the head were not visible in the frame, we discarded
the cropped image.
5.1 Network Architecture
We considered part of a recent head pose estimation
framework: the POSEidon-framework (Borghi et al.,
2018). The framework relied on depth data and did
not perform Head Pose Estimation on IR images. The
head pose estimation part in the framework is based
on three different branches, which considers depth
maps, grayscale images generated from depth maps
and motion images. All branches were trained with
the same CNN architecture. The output of the three
branches is fused in the end. We obtained the CNN,
which each branch in the framework used separately
(Figure 5).
The model exploited Dropout as regularization (σ
= 0.5) at the two fully connected layers.
We trained and tested the described model on the
IR data of the dashboard IR camera, providing base-
line results for the dataset.
5.2 Network Training
We trained the Deep Neural Network on the cropped
images of the dataset. We selecedt training and test
setup including loss function and training, validation
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
604

and test set definition accordingly. To evaluate the
model, we chose metrics for benchmarking on the
dataset.
For training, we defined our loss function as pre-
sented in (Borghi et al., 2017; Borghi et al., 2018) to
put more focus on the yaw, which is predominant in
the automotive context. Our labels range from -180
degree to 180 degree. We used a weighted L
2
loss
between label and prediction, where we weighed the
difference between them on the yaw with 0.45, pitch
with 0.35 and roll with 0.2. Furthermore, we took 19
of the 21 sequences of the subjects for training. We
use one sequence for the validation set and one for
testing. The training was done in batches with a size
of 128, where the batches were chosen randomly.
5.3 Evaluation Metrics
To provide a good benchmarking foundation, mean-
ingful metrics for the head pose estimation task are
required. Thus, we chose 4 metrics as a basis for fur-
ther benchmarking.
The first metric is the angle estimation error, that
we refer to as Mean Absolute Error (MAE).
MAE :=
1
n
n
∑
i=1
|
y −
e
y
|
(2)
It provides an easily comprehensible metric. Comput-
ing it on one axis or all axis result in the total estima-
tion error on the respective input. Another metric is
the Standard Deviation (STD), providing further in-
sight to the error distribution around the ground truth.
The third metric is the Root Mean Squared Error
(RMSE) to weigh larger errors higher.
RMSE :=
s
1
n
n
∑
i=1
(y −
e
y)
2
(3)
It takes the squared difference of the predicted value
and the ground truth value, weighing larger errors
higher. Thus, high variation in predictions of an al-
gorithm result in a higher overall error compared to
the mean without squaring the values. Computing the
mean over one or all axis and subsequently calculat-
ing the square root of the outcome produces the same
unit as the predictions and ground truth, thus making
it more understandable.
The last metric is the Balanced Mean Angular
Error (BMAE) as defined in (Schwarz et al., 2017),
which provides further insight as it takes different
ranges into consideration. The authors base their met-
ric on the unbalanced amount of different head ori-
entations due to driving and its bias towards frontal
orientation. The BMAE addresses this:
BMAE :=
d
k
∑
i
φ
i,i+d
, i ∈ dN ∩ [0, k], (4)
φ
i,i+d
is the average angular error. In contrast to
(Schwarz et al., 2017) which computes the difference
based on quaternions, we compute it as
|
y −
e
y
|
for all
labels y and predictions
e
y, where the absolute distance
of ground truth angle y to zero lies between i and i +
d. During our evaluation, we set the section size d to
5 degrees and maximum degree k to 120.
We tested the previously presented POSEidon-
model on the metrics to provide a baseline for future
head pose estimation benchmarking.
5.4 Results
Our evaluations for head orientation estimation on all
metrics are shown in table 2.
Table 2: Results on the 64x64 pixel cropped images of Po-
seidon trained and tested on our dataset.
Metric Pitch Roll Yaw Avg
MAE 2.96 3.16 3.99 3.37
STD 4.63 3.93 7.82 5.46
RMSE 4.73 4.55 7.98 5.97
BMAE 7.10 9.42 19.05 11.86
The results showed the performance of the
POSEidon-CNN on our 64 pixel images. We ob-
served that the CNN had a lower error than 3.5 degree
on the MAE. The BMAE shows that the networks per-
formed worse if more extreme poses with less exam-
ples are weighted equally as more common poses. In
general, we noted that the yaw is more challenging as
the network performed worse on the yaw on all met-
rics compared to the pitch and roll.
6 CONCLUSION
In this paper, we introduced a new large-scale driver
head pose and eye gaze dataset. We discussed in de-
tail, the head and camera calibration pipeline that en-
abled us to have the head pose described in the cam-
era frame. We captured data from two positions in
our car simulator for 21 subjects (10 females and 11
males). We collected 1.1M images from the dash-
board IR camera and collected 315K images for each
type from Kinect v2 (RGB, Depth, IR). We acquired
the ground truth head pose of all frames of the dataset
head pose using a sub-millimeter accurate motion
capturing system. Moreover, we annotated the frames
of the dataset with information about driver’s activity,
face accessories (clear glasses, and sunglasses) and
face occlusion.
Based on our dataset, we selected a state-of-the-
art method to generate a baseline result on the IR data
AutoPOSE: Large-scale Automotive Driver Head Pose and Gaze Dataset with Deep Head Orientation Baseline
605

for head orientation estimation task.
ACKNOWLEDGEMENT
This work was partially funded by the company IEE
S.A. in Luxembourg. The authors would like to
thank Bruno Mirbach, Frederic Grandidier and Fred-
eric Garcia for their support. This work was partially
funded by the German BMBF project VIDETE under
grant agreement number (01|W18002).
REFERENCES
Ahn, B., Choi, D.-G., Park, J., and Kweon, I. S. (2018).
Real-time head pose estimation using multi-task deep
neural network. Robotics and Autonomous Systems,
103:1 – 12.
Ahn, B., Park, J., and Kweon, I. S. (2015). Real-time head
orientation from a monocular camera using deep neu-
ral network. In Cremers, D., Reid, I., Saito, H., and
Yang, M.-H., editors, Computer Vision – ACCV 2014,
pages 82–96, Cham. Springer International Publish-
ing.
Baltrusaitis, T., Zadeh, A., Lim, Y. C., and Morency,
L. (2018). Openface 2.0: Facial behavior analysis
toolkit. In 2018 13th IEEE International Conference
on Automatic Face Gesture Recognition (FG 2018),
pages 59–66.
Barros, J. M. D., Mirbach, B., Garcia, F., Varanasi, K., and
Stricker, D. (2018). Fusion of keypoint tracking and
facial landmark detection for real-time head pose esti-
mation. In 2018 IEEE Winter Conference on Applica-
tions of Computer Vision (WACV), pages 2028–2037.
Borghi, G., Fabbri, M., Vezzani, R., Cucchiara, R., et al.
(2018). Face-from-depth for head pose estimation on
depth images. IEEE transactions on pattern analysis
and machine intelligence.
Borghi, G., Venturelli, M., Vezzani, R., and Cucchiara, R.
(2017). Poseidon: Face-from-depth for driver pose
estimation. In The IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Fanelli, G., Gall, J., and Van Gool, L. (2011). Real time
head pose estimation with random regression forests.
In CVPR 2011, pages 617–624. IEEE.
Meyer, G. P., Gupta, S., Frosio, I., Reddy, D., and Kautz, J.
(2015). Robust model-based 3d head pose estimation.
In Proceedings of the IEEE International Conference
on Computer Vision, pages 3649–3657.
Papazov, C., Marks, T. K., and Jones, M. (2015). Real-time
3d head pose and facial landmark estimation from
depth images using triangular surface patch features.
In The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Ranjan, R., Patel, V. M., and Chellappa, R. (2019). Hy-
perface: A deep multi-task learning framework for
face detection, landmark localization, pose estimation,
and gender recognition. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 41(1):121–135.
Schwarz, A., Haurilet, M., Martinez, M., and Stiefelhagen,
R. (2017). Driveahead-a large-scale driver head pose
dataset. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition Workshops,
pages 1–10.
Tsai, R. Y. and Lenz, R. K. (1989). A new technique for
fully autonomous and efficient 3d robotics hand/eye
calibration. IEEE Transactions on Robotics and Au-
tomation, 5(3):345–358.
Zhang, X., Sugano, Y., Fritz, M., and Bulling, A. (2015).
Appearance-based gaze estimation in the wild. In
Proc. of the IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), pages 4511–4520.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
606
