
Application of U-Net and Auto-Encoder to the Road/Non-road
Classification of Aerial Imagery in Urban Environments
Amanda Spolti
1
, Vitor C. Guizilini
3
, Caio C. T. Mendes
4
, Matheus D. Croce
5
,
Andr
´
e R. de Geus
1
, Henrique C. Oliveira
2
, Andr
´
e R. Backes
1
and Jefferson R. Souza
1
1
School of Computer Science, Federal University of Uberl
ˆ
andia, Uberl
ˆ
andia, MG, Brazil
2
Faculty of Civil Engineering, Architecture and Urbanism, State University of Campinas, Campinas, SP, Brazil
3
School of Information Technologies, University of Sydney, Sydney, Australia
4
Department of Computer Science, Federal University of S
˜
ao Carlos, S
˜
ao Carlos, SP, Brazil
5
Institute of Mathematics and Computer Science, University of S
˜
ao Paulo, S
˜
ao Paulo, SP, Brazil
arbackes@yahoo.com.br, {geus.andre, jrsouza}@ufu.br
Keywords:
Road Detection, Deep Learning, Auto-Enconder, U-Net.
Abstract:
One of the challenges in extracting road network from aerial images is an enormous amount of different car-
tographic features interacting with each other. This paper presents a methodology to detect the road network
from aerial images. The methodology applies a Deep Learning (DL) architecture named U-Net and a fully
convolutional Auto-Encoder for comparison. High-resolution RGB images of an urban area were obtained
from a conventional photogrammetric mission. The experiments show that both architectures achieve satisfac-
tory results for detecting road network while maintaining low inference time once DL networks are trained.
1 INTRODUCTION
In the past few years, the usage of high-resolution
aerial images along with machine learning techniques
applications have been extensively used for carto-
graphic features extraction, mainly road and street
geometry. However, extracting such features is not
a trivial task considering the large number of diffe-
rent objects interacting with the roads (Mendes and
Dal Poz, 2011). Several studies from the most diverse
fields are being developed such as route optimization
(Silva et al., 2016), landscape changes monitoring and
natural resources preservation (Galo, 2000).
Over the years, artificial intelligence problems
that had previously been solved using very compli-
cated code began to be explored by Machine Lear-
ning (ML). This technique is based on the principle
of extracting patterns and data features to feed the
algorithm that learns automatically. The introduc-
tion of ML allowed solution using real-world data to
help in the process of decision-making in several are-
as (Goodfellow et al., 2016).
Considering the evolution of this computational
area, the simple learning classifiers are being replaced
by more effective methods that better represent the
human brain functionality, such as neural networks.
Recently, the Deep Learning (DL) architectures have
gained attention due to the current capacity of storage
and processing large amounts of data, despite being
developed a few decades ago. Nowadays, the scien-
tific world has much more ability to manipulate such
amount of data, and therefore several studies are be-
ing designed and applying DL. It can attack the most
diverse problems since a DL architecture can be very
flexible and created to fit a specific dataset.
One of the branches of DL is called Convolutional
Neural Network (CNN). The CNN also can be ap-
plied in the Natural Language Processing (NLP) pro-
blems (Goodfellow et al., 2016). Classification is
a task where convolution is vastly used, especially
in visual recognition. In 2015, Ronnerberger (Ron-
neberger et al., 2015) built a fully convolutional net-
work to attack the problem of biomedical image seg-
mentation. However, the architecture was modified to
fit the particularities of the task named U-Net. One
of these particularities is the fact that thousands of
biomedical training images are quite unlikely to have.
In this work the U-Net deep neural networks ar-
chitecture was applied over the problem of road net-
work detection to verify its accuracy in a dataset,
where there are two class labels (road or non-road),
but the context is equally important. We compared
Spolti, A., Guizilini, V., Mendes, C., Croce, M., R. de Geus, A., Oliveira, H., Backes, A. and Souza, J.
Application of U-Net and Auto-Encoder to the Road/Non-road Classification of Aerial Imagery in Urban Environments.
DOI: 10.5220/0009337306070614
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
607-614
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
607
the results obtained with a fully convolutional Auto-
Encoder. The dataset is composed of portions of
aerial images with dimension 256 × 256 pixels from
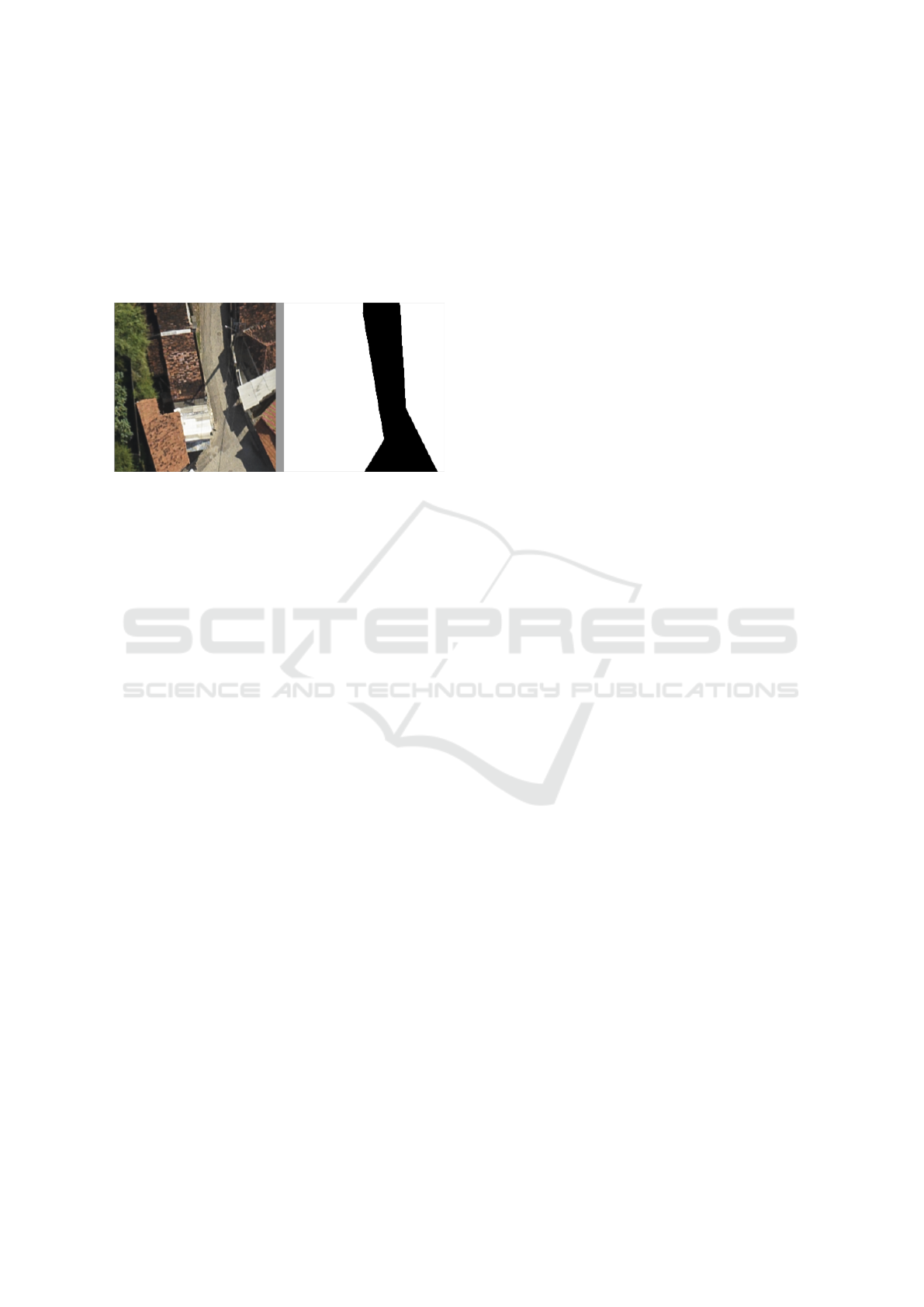
an urban area Figure 1. Also, the class labels are black
for representing roads and white representing other
objects. As mentioned, the context is crucial since
many different objects can be easily mixed with roads
such as roofs, cars, parking lots, sidewalks, etc.
Figure 1: The problem. The left image is acquired from an
airplane, where it has road and non-road objects. The right
image is the ground truth image.
The remainder of this paper is organized as fol-
lows: Section II discusses related works; Section III
presents the proposed methodology, detailing the U-
Net along with the architectures used for compari-
son; the experimental setup, results, and analysis are
shown in Section IV; finally, Section V draws the con-
clusions and suggests directions for future work.
2 RELATED WORK
The work of (Jordan and Ana-Maria, 2013) proposed
a new strategy to identify buildings from aerial im-
age analysis. The training stage was carried out by an
operator who selected points of interest in the image,
structures, and aspects of non-interest, such as vege-
tation and streets. A combination of shape attributes
with an automated region growth technique and Sup-
port Vector Machine is used to rank between points
of interest and insignificant points. This strategy was
tested by manipulating 20 portions of aerial images
with a resolution of 256 × 256 pixels that contained
different topologies. This strategy obtained higher re-
sults (97,8% accuracy) when compared to other tech-
niques discussed in the literature. Thus, it concludes
that the shape descriptors encode an appropriate set of
features that allow identifying objects of interest cor-
rectly in most images, despite the different shapes and
sizes of roofs.
Using deep learning architecture, the method pre-
sented in (Mendes et al., 2016) considered the prob-
lem of road detection, where given an image, the goal
was to classify each pixel of the image in road or
non-road. The architecture was a Convolutional Neu-
ral Network, targeting a model that employs a size-
able contextual window while maintaining efficient
inference properties. For that, a Network-in-Network
(NiN) architecture was applied, and the model was
converted into a fully convoluted network after the
training. The KITTI Vision Benchmark Suite was
used for training and evaluation of the proposed ar-
chitecture. This database offers 289 training images
along with its ground truth and 290 test images. A
precision of 92% was obtained both using the NiN ar-
chitecture and without, however, with the NiN archi-
tecture, the time of inference was significantly lower.
The results revealed that the inference time of the pro-
posed approach is unique at this level of accuracy,
with two orders of magnitude faster than other meth-
ods with similar performance.
A neural network architecture, named SegNet,
was proposed by (Badrinarayanan et al., 2015), which
uses a fully convolutive pixel-wise semantic segmen-
tation. The core of the segmentation mechanism con-
sists of an encoder network and a corresponding de-
coder network, that produces as output segmented
pixel information corresponding to each considered
class. The encoder network includes 13 convolutional
layers. Each layer of the encoder has a similar de-
coder layer, so the decoder network also has 13 layers.
The SegNet architecture performance was measured
in two different situations, the first being the classifi-
cation of roads, trees, walks, cars, etc. The second is
the indoor scene segmentation that is of immediate in-
terest to various augmented reality (AR) applications.
In the case of the second scene, because it is a prob-
lem that contains several classes, the result obtained
was not satisfactory. However, for the classification
of roads, the SegNet was efficient and achieved re-
sults with 90% of accuracy. SegNet was compared
to other architectures regarding training time, mem-
ory, and efficiency. Some of them had better results;
however, more memory was required by the amount
of data stored. SegNet is more efficient because it
only saves the maximum pool of indexes of resource
maps and uses them in its decoder network to achieve
a good performance; then using less memory and still
obtaining satisfactory results.
Another work using the DL technique was pro-
posed by (Kussul et al., 2017) to classify satellite im-
ages about the soil coverage and their cultures. To re-
store missing data due to clouds and shadows present
in the images, a preprocessing phase was necessary.
For classification purposes, a fully connected super-
vised neural network (MLP - Multilayer Perceptron)
and a Random Forest was applied, comparing such
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
608

techniques with a convolutional neural network. The
experiments were carried out using 19 multitemporal
images of the region of Ukraine acquired by RS satel-
lites of Landsat8 and Sentinel-1A. Using two archi-
tectures variations of a convolutional neural network,
called 1-D and 2-D to explore spectral and spatial fea-
tures respectively. An accuracy of 93.5% and 94.6%
respectively were obtained, while Random Forest and
MLP obtained 88.7% and 92.7% respectively. Conse-
quently, the proposed architecture proved more useful
for the described problem.
Another approach based on deep learning for fea-
ture detection in the scope of remote sensing was pro-
posed by (Zou et al., 2015) treating the problem of ex-
traction as a problem of features reconstruction. The
proposed method selects the most reconstructive char-
acteristics as the discriminative ones. In the experi-
ments, 2800 orbital images were divided into seven
categories (grass, farm, industry, river, forest, resi-
dential, parking) for performance evaluation. To ad-
dress the problem of feature reconstruction, a Deep
Belief Network (DBN) was used. An iterative algo-
rithm for learning features was developed to obtain re-
liable reconstruction weights and characteristics with
small reconstruction errors. On average, an accuracy
of 77% was reached, and the category with the most
misclassification was the industry category with 65%,
and the least confused class being the forest with an
accuracy of 93.5%. Considering the complexity of the
classification type, then the experiments validated the
efficiency of the proposed method.
Our proposal uses CNN architectures U-Net and
Auto Encoder, which have not yet been applied for ex-
traction of cartographic features using aerial images,
specifically on roads. Consequently, the proposal was
not used in the scientific literature for such problem.
3 PROPOSED METHODOLOGY
Our methodology presents two DL networks archi-
tectures: U-Net and Auto-Encoder. We have chosen
these two networks because they are representative of
the state-of-the-art in the proposed task and, more im-
portantly, are computationally efficient and capable of
considering a large amounts of contextual informa-
tion, which is crucial in this case. The purpose of
this paper is showing comparison of both in the road
network detection using aerial images. Each DL ar-
chitecture is described in subsections below.
3.1 U-Net Architecture
The U-Net has two phases: contraction and expan-
sion. In the contraction path, the input image goes
through 2 convolutions 3 × 3, stride 1, generating 8
feature channels and the ReLU activation function in
the first step followed by a 2 × 2 max pooling opera-
tion with stride 2. After each max pooling operation,
the number of feature channels is increased by a fac-
tor of two, and the input size is reduced by the same
factor due to the effects of the max pooling. In the
contraction path, a step is defined by 2 convolutions
and a max-pooling operation.
After 4 steps, the resulting output is fed to an up-
convolution 2 × 2, stride 2 and 64 feature channels
in the first step which is the beginning of the expan-
sion path. Every step of this phase consists of the
up-convolution with the parameters described above.
Moreover, the output of the same stage of the con-
traction path is concatenated, and convolutions are ap-
plied as in the contraction path. After each step, the
number of feature channels is reduced by a factor of
two. In the last layer, convolution with a single ker-
nel 1 × 1 is applied, and the resulting tensor passes
through the sigmoid function. Output is a single chan-
nel image with pixel values in the interval [0, 1], dur-
ing inference, thresholded at 0.5 and mapped to black
or white for visualization purposes. Black (zero) pix-
els are pixels classified as roads and white otherwise.
Figure 2 represents the U-Net used in our work.
3.2 Auto-Encoder Architecture
It is based on (Long et al., 2015) proposing fully con-
volutional networks for semantic segmentation. A
fully convolutional network does not have any fully
connected layer, such that all neurons from one layer
are connected to all neurons from the next layer. This
was common in most topologies up to this point, espe-
cially in deeper layers. However, there are benefits in
eliminating full connections: 1) decrease in the num-
ber of trainable parameters; 2) preservation of spatial
correlation; 3) images of any size can be equally pro-
cessed using the same network.
Aiming for future online applications and onboard
processing, a relatively simple topology was used in
this work, composed of three convolutional layers,
with filter size 5 × 5 and three deconvolutional lay-
ers (the convolutional transpose), with the same filter
size. Each layer is followed by a ReLU (Xu et al.,
2015), to introduce non-linearities, and convolutional
layers receive a max-pooling of 2, to downsample
spatial dimensions, while deconvolutional layers up-
sample input images by the same factor, doubling
their spatial dimensions. Convolutional and decon-
volutional layers are connected by a fourth convolu-
tional layer, with filter size 3 × 3, no activation func-
Application of U-Net and Auto-Encoder to the Road/Non-road Classification of Aerial Imagery in Urban Environments
609
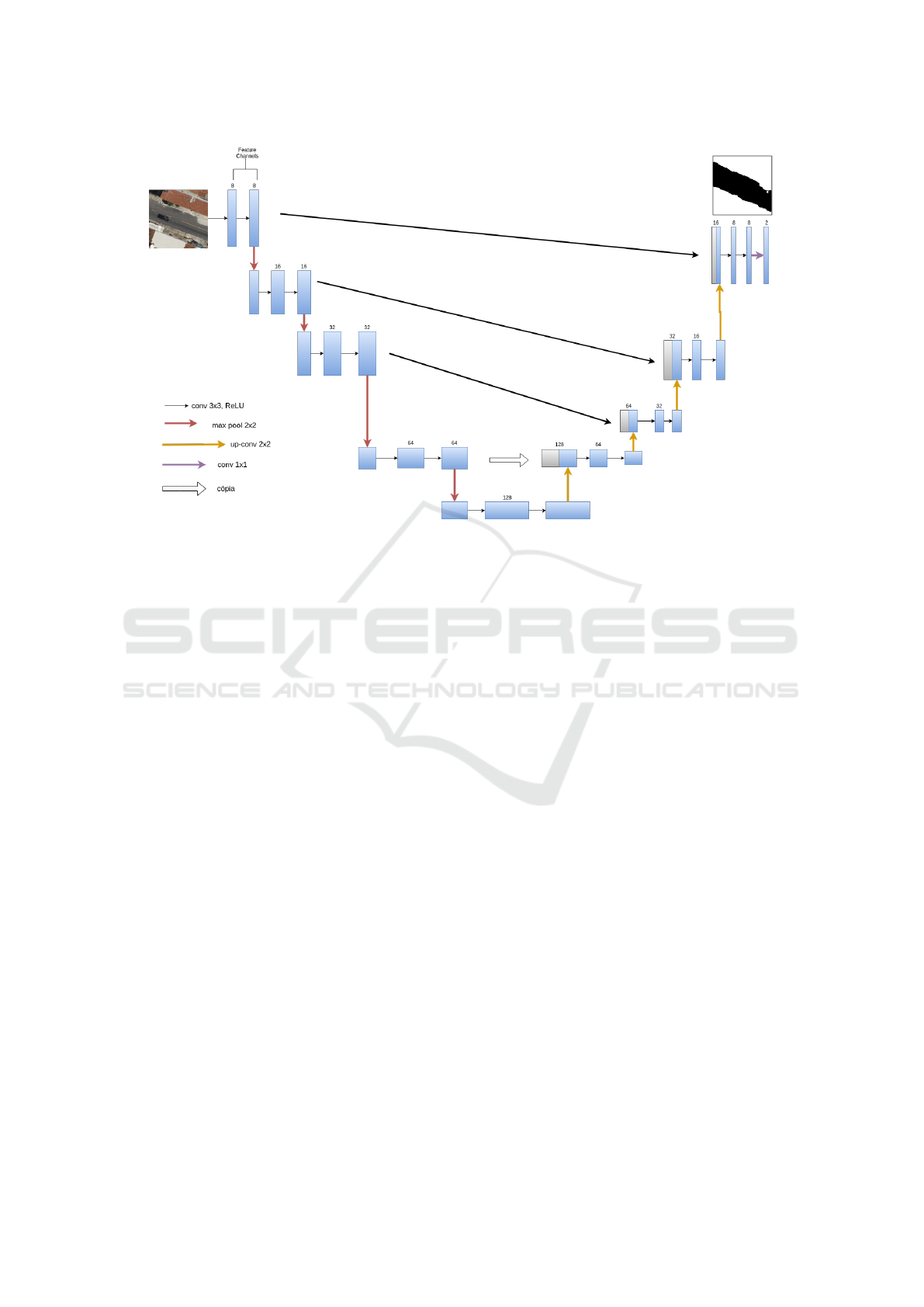
Figure 2: U-Net architecture diagram used in our work.
tion and dropout (Srivastava et al., 2014) of 0.6 (60%
of nodes are randomly turned off during training, to
increase the network’s ability to generalize over in-
puts). The number of neurons in each convolutional
layer was respectively 64, 128 and 256, and these
numbers were inverted in the deconvolutional layers.
The final layer produces 1-channel outputs, with
a sigmoid activation function to provide values be-
tween [0, 1] that serve as a probabilistic classification
for each pixel. The crossentropy loss function was
optimized during training phase, based on ground-
truth labeled information, using an Adam optimizer
(Kingma and Ba, 2014) with a learning rate of 10
−4
.
Figure 3 shows Auto-Encoder applied in our work.
3.3 Differences between U-Net and
Auto-Encoder
The main difference between the architectures U-Net
and Auto-Encoder are the skip connections, which
connect each stage of the contraction path to the cor-
responding stage of the expansion. These skip con-
nections tend to avoid local minima during training.
Moreover, one can view them as simplifying or divi-
ding the training. For instance, during early iterations
of training, if the network has no skip connections,
it has to adjust all the weights of the network to ge-
nerate any meaningful result. Meanwhile, a network
with skip connections has to modify only the weights
of the layers that comprise the shortest path from in-
put to output to do the same. Although this difference
simplifies the training (at least the initial iterations),
whether it is beneficial to the overall accuracy can be
only accessed through experimental data.
4 EXPERIMENTAL RESULTS
To evaluate the performance of the proposed method-
ology, we implemented the described system in Ten-
sorflow (Abadi et al., 2015) and Keras. We tested its
performance on images test set. Python language was
selected, due to its widespread use in DL applications,
and a Titan X Pascal GPU card (12GB) was used to
increase computational performance for model train-
ing. Once training is complete, model can be stored
for later use, allowing fast inference in similar GPU
cards, standard CPU machines or even in onboard
computers, for online classification.
The dataset is composed of 3814 images of 256 ×
256 divided into 80% for training, 10%, for testing
and 10% for validation. The architectures were im-
plemented in Python using the Keras (Chollet et al.,
2015) library with Tensorflow. The network is trained
for 300 epochs or until the validation accuracy stops
improving (for 30 epochs in a row).
To analyze the U-Net and Auto-Encoder perfor-
mance to predict images with different levels of diffi-
culty, then five images were selected from the testing
database. Figure 4 shows the original image, its label
and how the U-Net and Auto-Encoder performed. In
Image 1 and Image 2, the U-Net and Auto-Encoder
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
610
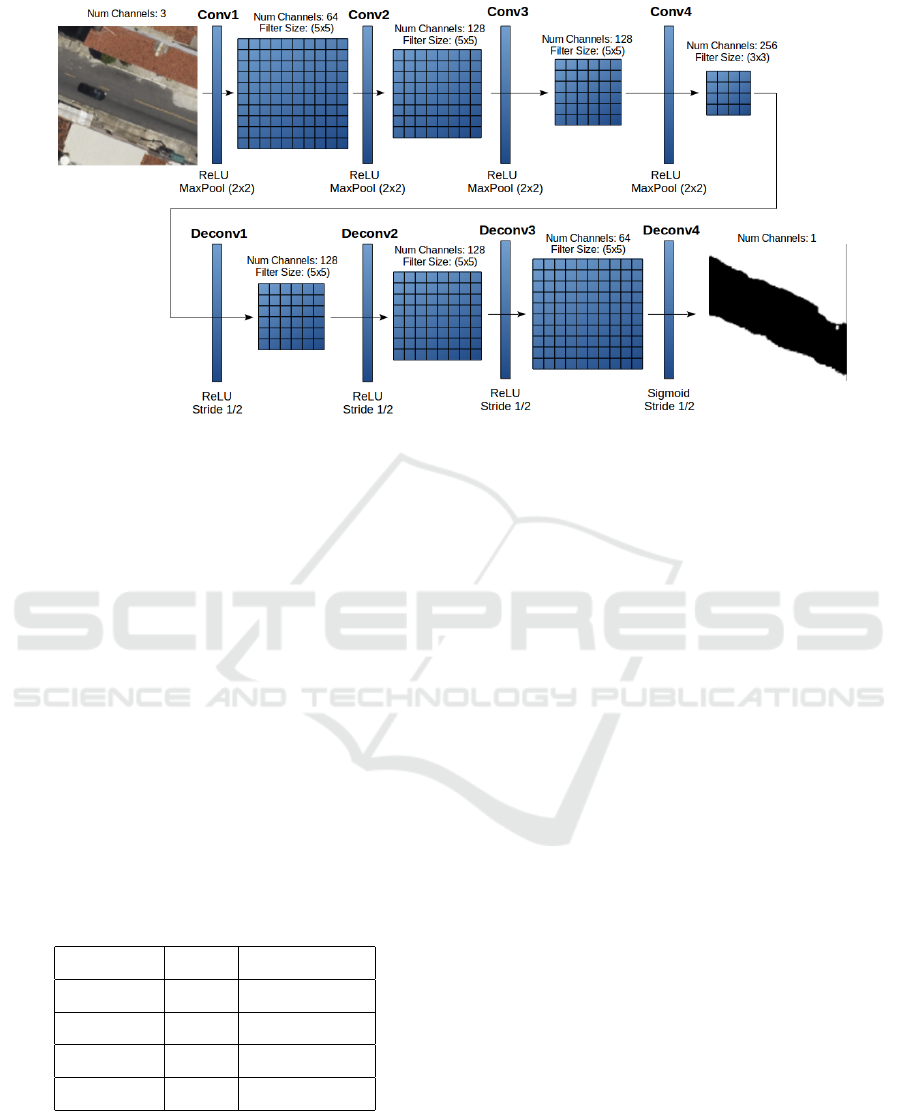
Figure 3: Auto-Encoder CNN diagram used in our work.
classification was very accurate. However, in Im-
age 3, 4 and 5 the classification was a little weak in
both architectures because these images contain ob-
jects that can be easily mixed with roads consider-
ing the color similarity. In Image 5, the U-Net ar-
chitecture could distinguish the roof from the roads
besides the color similarity however the classification
is very different from the ground truth. On the other
hand, with the Auto-Encoder architecture the predic-
tion was wrong again because of the color that can be
easily mistaken even for humans.
Table 1 shows a comparison between the U-Net
and Auto-Encoder architectures. It is possible to no-
tice that the Auto-Encoder showed the best perfor-
mance. The metrics of the two architectures were very
similar, however the Auto-Encoder still obtained bet-
ter results except for the accuracy measurement where
U-Net acquired 89.1% and the Auto-Encoder 88.0%
Table 1: Results.
U-Net Auto-Encoder
Accuracy 0.891 0.880
Precision 0.800 0.899
Recall 0.856 0.919
F-Measure 0.820 0.907
To verify the viability of the methodology, a new
image with similar data to those used during training
was classified. New aerial images obtained by an air-
plane were classified allowing a qualitative analysis of
model capability in classifying roads and non-roads.
Figure 5 and 6, both architectures shows similar
results. However, Figure 6 demonstrates the complete
classified aerial image by Auto-Encoder showing that
this CNN predicted more roads compared to U-Net.
Even though in specific scenarios the results are
not satisfactory, techniques such as skeletonization
and mathematical morphology can be applied to re-
construct the part of the image that was not well clas-
sified. This technique has the classified result as input
and a geometric network (vectors) as output.
5 CONCLUSIONS
The proposed methodology applied two deep learn-
ing architectures to the problem of road classification
from an aerial image. The aim is to classify the ob-
jects in an aerial image as a road or non-road helping
in the mapping process of a region, saving resources
and time of the responsible operator.
The results showed the performance of the U-Net
to classify an aerial image and its objects in road and
non-road. On the other hand, for future works, it
is essential to improve the architecture so it is able
to analyze the context where every pixel is located
so objects with color similarity will not be mistaken
with roads as shown in Figure 4 - Image 5. One pos-
sible solution is to observe the connection between
the black pixels in the resulting image, in Image 5
for example using the Auto-Encoder architecture, the
prediction is completely disconnected, and therefore
it can be eliminated or improved with mathematical
morphology.
Application of U-Net and Auto-Encoder to the Road/Non-road Classification of Aerial Imagery in Urban Environments
611

(a) Image 1 (b) Label (c) Prediction U-Net (d) Prediction Auto-Encoder
(e) Image 2 (f) Label (g) Prediction U-Net (h) Prediction Auto-Encoder
(i) Image 3 (j) Label (k) Prediction U-Net (l) Prediction Auto-Encoder
(m) Image 4 (n) Label (o) Prediction U-Net (p) Prediction Auto-Encoder
(q) Image 5 (r) Label (s) Prediction U-Net (t) Prediction Auto-Encoder
Figure 4: Several levels images along with its label and prediction applying the U-Net and Auto-Encoder architectures.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
612

Figure 5: Image reconstruction with U-Net. The reconstructed image is the junction of the 256 × 256 classified figures in a
test set, black represents roads and white non-roads.
Figure 6: Image reconstruction with Auto-Encoder. The reconstructed image is the junction of the 256×256 classified figures
in a test set, black represents roads and white non-roads.
Also, a larger database containing different im-
ages perspectives would help the network to learn
and therefore better classify these images. Ultimately,
even with its mistakes, the Auto-Encoder architecture
can be advantageous as input in techniques such as
skeletonization mentioned before therefore assisting
in many applications such as route optimization, min-
imizing resources, time and operators effort. Lastly,
we can investigate the use of multitemporal images in
our problem.
ACKNOWLEDGEMENTS
The authors would like to acknowledge Federal Uni-
versity of Uberl
ˆ
andia and University of Campinas,
Application of U-Net and Auto-Encoder to the Road/Non-road Classification of Aerial Imagery in Urban Environments
613

CNPq (National Council for Scientific and Techno-
logical Development) under Grant #400699/2016-8
and #301715/2018-1. This study was financed in part
by the Coordenac¸
˜
ao de Aperfeic¸oamento de Pessoal
de N
´
ıvel Superior - Brazil (CAPES) - Finance Code
001.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., Ghemawat, S., Goodfellow, I., Harp, A., Irving,
G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser, L., Kud-
lur, M., Levenberg, J., Man
´
e, D., Monga, R., Moore,
S., Murray, D., Olah, C., Schuster, M., Shlens, J.,
Steiner, B., Sutskever, I., Talwar, K., Tucker, P., Van-
houcke, V., Vasudevan, V., Vi
´
egas, F., Vinyals, O.,
Warden, P., Wattenberg, M., Wicke, M., Yu, Y., and
Zheng, X. (2015). TensorFlow: Large-scale machine
learning on heterogeneous systems.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2015).
Segnet: A deep conv. encoder-decoder arch. for image
segmentation. arXiv preprint.
Chollet, F. et al. (2015). Keras. https://github.com/ fchol-
let/keras.
Galo, M. (2000). Aplicacao de redes neurais artificiais e
sens. remoto na carac. ambiental do parque est. morro
do diabo. Sao Carlos.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT.
Jordan, T. and Ana-Maria, C. (2013). A supervised train-
ing and learning method for building ide. in remotely
sensed imaging. In SRSE, pages 73–78.
Kingma, D. and Ba, J. (2014). Adam: Method for stochastic
optimization. In ICLR.
Kussul, N., Lavreniuk, M., Skakun, S., and Shelestov, A.
(2017). Deep learning classification of land cover and
crop types using remote sensing data. IEEE Geo-
science and Remote Sensing Letters, pages 778–782.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
CVPR, pages 3431–3440.
Mendes, C. C. T., Fremont, V., and Wolf, D. F. (2016). Ex-
ploiting fully convolutional neural networks for fast
road detection. In IEEE Int. Conference on Robotics
and Automation (ICRA), pages 3174–3179.
Mendes, T. S. G. and Dal Poz, A. P. (2011). Classificacao
de imagens aereas de alta-resolucao utilizando redes
neurais artificiais e dados de varredura a laser. Simp.
Brasileiro de Sensoriamento Remoto, pages 7792–
7799.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical im-
age segmentation. In Medical Image Computing
and Computer-Assisted Intervention, pages 234–241.
Springer.
Silva, F., Minette, L. J., Souza, A. P. d., Moraes, A. C. d.,
and Schettino, S. (2016). Classification of forest roads
and determination of route using geographic informa-
tion system. Revista Arvore, pages 329–335.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
to prevent neural networks from overfitting. JMLR,
pages 1929–1958.
Xu, B., Wang, N., Chen, T., and Li, M. (2015). Empiri-
cal evaluation of rectified activations in convolutional
network.
Zou, Q., Ni, L., Zhang, T., and Wang, Q. (2015). Deep
learning based feature selection for remote sensing
scene class. GRSL, pages 2321–2325.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
614
