
Scene Understanding and 3D Imagination: A Comparison between
Machine Learning and Human Cognition
Michael Schoosleitner
1
and Torsten Ullrich
1,2
1
Institute of Computer Graphics and Knowledge Visualization, Graz University of Technology, Austria
2
Fraunhofer Austria Research GmbH, Visual Computing, Austria
Keywords:
3D Imagination, Scene Understanding, Assistance System, Computer-aided Design, Machine Learning,
Computer-aided Manufacturing, Artificial Intelligence, Human Cognition.
Abstract:
Spatial perception and three-dimensional imagination are important characteristics for many construction tasks
in civil engineering. In order to support people in these tasks, worldwide research is being carried out on
assistance systems based on machine learning and augmented reality.
In this paper, we examine the machine learning component and compare it to human performance. The test
scenario is to recognize a partly-assembled model, identify its current status, i.e. the current instruction step,
and to return the next step. Thus, we created a database of 2D images containing the complete set of instruction
steps of the corresponding 3D model. Afterwards, we trained the deep neural network RotationNet with these
images. Usually, the machine learning approaches are compared to each other; our contribution evaluates the
machine learning results with human performance tested in a survey: in a clean-room setting the survey and
RotationNet results are comparable and neither is significantly better. The real-world results show that the
machine learning approaches need further improvements.
1 INTRODUCTION
Assistance systems find a multitude of applications
in practically all areas of everyday life. In the con-
text of cyber-physical systems (Tao et al., 2019), they
can be used to support technicians: technical details,
construction plans, manuals and other kinds of infor-
mation can be displayed at the right time in their field
of vision; i.e., they can have the next step of a repair
directly displayed in their view. Exactly this applica-
tion scenario is examined in this evaluation – a ma-
chine learning, computer-vision system shall recog-
nize a partly-assembled model and the last, completed
instruction step.
In detail, the long-term goal of this assistance sys-
tem is to support a technician during the assembly of
a complex device, which is manufactured in a small
series or is even unique. In this setting, an augmented
reality (AR) system might observe the assembly via
video camera, determine the current state of the work
piece (i.e., which construction step was carried out
last) and display the next step of the construction
manual. Consequently, the main components of the
new support system are an augmented reality, head-
mounted display (Kress and Cummings, 2017) with
an integrated camera system (Evans et al., 2017), a
database with the construction plans of a computer-
aided design (CAD) model, and a machine learning
component to analyze the images taken by the cam-
era returning the current construction status.
In this paper we focus on the computer vision, ma-
chine learning component that has been trained with
the assembly of a CAD model using the correspond-
ing construction and assembly plans. The results of
such a component are then compared to human per-
formances.
2 RELATED WORK
The problem to identify the current status of an as-
sembly (by identifying the correct step number) can
be approached using 3D techniques based on depth
images and reconstruction algorithms (H
¨
ane et al.,
2017), or using 2D image-based methods. This dis-
tinction is blurred because 3D depth information can
not only be extracted from several 2D images (Hartley
and Zisserman, 2004), but can also be learned from a
single 2D image (Saxena et al., 2006), (Kuznietsov
Schoosleitner, M. and Ullrich, T.
Scene Understanding and 3D Imagination: A Comparison between Machine Learning and Human Cognition.
DOI: 10.5220/0009350002310238
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 2: HUCAPP, pages
231-238
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
231
et al., 2017), (Mahjourian et al., 2018). Since ma-
chine learning approaches (if necessary) can implic-
itly learn the depth information, the explicit handling
of depth information is not necessary with image-
based approaches on a machine-learning basis.
If each intermediate step represents a separate
class, the problem of visual recognition of the cur-
rent state can be considered as an image classification
problem (Deng et al., 2009). An overview of the state-
of-the-art in machine learning in general and image
classification in particular can be found in “A State-
of-the-Art Survey on Deep Learning Theory and Ar-
chitectures” (Alom et al., 2019).
According to the long-term goal, the new assis-
tance system will be used in the field of mechani-
cal engineering; due to intellectual property protec-
tion regulations, a LEGO Technic
TM
model of com-
parable complexity is used instead of real CAD data:
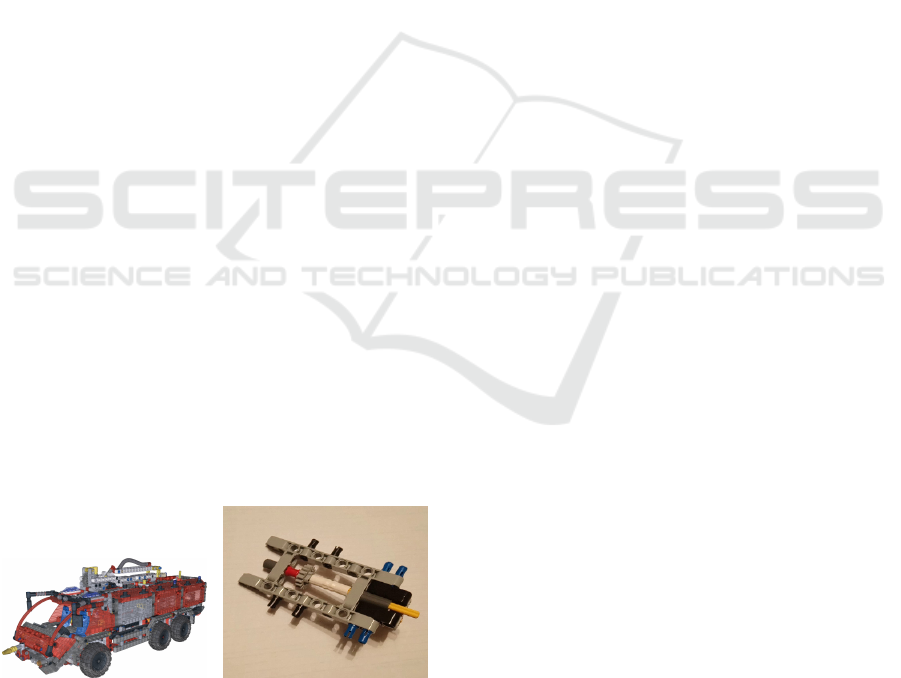
the “Airport Rescue Vehicle” (no. 42068) consists of
1094 parts and measures over 42cm high, 45cm long
and 15cm wide. The corresponding CAD model has
a sequence of 137 construction steps and has been au-
thored by PHILIPPE HURBAIN. It is published un-
der the license CCAL VERSION 2.0 at LDRAW.ORG.
Figure 1 (left) shows a semi-transparent rendering of
the model including its inner parts.
In order to learn the construction of this CAD
model, a multi-view convolutional neural network
(MVCNN) is used. The method used for the practi-
cal implementation is called RotationNet (Kanezaki
et al., 2018). It is inspired by the concepts of
MVCNN (Su et al., 2015), a multi-view convolutional
neural network to classify 3D objects from 2D im-
ages, and by the pose estimation technique of “Con-
volutional Models for Joint Object Categorization and
Pose Estimation” (Elhoseiny et al., 2016). These two
concepts are combined and extended by RotationNet:
MVCNN uses different view points and camera po-
sitions distributed over a sphere to get 2D images of
Figure 1: The test set of the new assistance system is a
LEGO Technic
TM
model consisting of 1094 parts that are
assembled in 137 construction steps. The assembly of the
“Airport Rescue Vehicle” has been video recorded. While
the image on the left hand side shows the complete model,
the image on the right hand side shows the CAD model at
an early stage.
a 3D object. These images are trained with the net-
work structure of AlexNet (Krizhevsky et al., 2012).
The MVCNN approach demands for each class that
all camera positions are available as images; i.e. for
every pre-defined view point all 3D objects must be
captured. This is, however, hard to realize in a real-
world scenario, where view positions are often limited
and not precise. Therefore, RotationNet removes this
limitation of MVCNN by repositioning the pooling
layer and combining it with the method of (Elhoseiny
et al., 2016). They propose to use object prediction
and pose estimation with one 2D image as input for
the classification process.
To estimate unknown poses of a 3D object during
the training process, an unsupervised pose estimation
is used, which is influenced by (Zhou et al., 2017).
This is a “meta” task which is conducted in every
training step. Another benefit is that it is possible to
predict a class with a specific set of images captured
from one view position region. This is important for
estimating new positions and simultaneously classi-
fying objects. To get a low error rate, this step is of
significant importance.
As mentioned above, the camera positions used
in RotationNet are highly influenced by MVCNN.
RotationNet uses a camera distribution on a dodec-
ahedron for the image benchmark data sets.
3 PROPOSED METHOD
The ModelNet benchmark consists of two databases,
namely ModelNet10 and ModelNet40 (Wu et al.,
2015). These two databases comprehend CAD mod-
els with 10 and 40 classes. This benchmark (see
modelnet.cs.princeton.edu) provide researchers in
computer vision, computer graphics, robotics and
cognitive science, with a comprehensive clean col-
lection. Furthermore, the benchmark lists the classi-
fication accuracy of state-of-the-art algorithms. Ta-
ble 1 shows a comparison of selected methods (as
of September 2019). Based on this benchmark, we
choose the RotationNet framework to solve the CAD
classification problem; respectively, the assembly as-
sistance task.
Due to the fact that the CAD model in the
assembly assistance scenario is not similar to the
existing dataset used by RotationNet at the Ima-
geNet Large Scale Visual Recognition Competition
(ILSVRC) in 2012 (Russakovsky et al., 2015), we
created a new database using the LEGO Technic
TM
model mentioned before. The LEGO model data for-
mat (LDRAW) stores the model data as instruction
steps which fit to the proposed use case. Every in-
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
232

Table 1: Selection of methods compared with the Model-
Net Benchmark as of Sep. 2019. RotationNet has the best
accuracy on both datasets.
Algorithm ModelNet40 ModelNet10
RotationNet 97.37% 98.46%
(Kanezaki et al., 2018)
PANORAMA-ENN 95.56% 96.85%
(Sfikas et al., 2018)
MVCNN-MultiRes 91.40% –
(Qi et al., 2016)
VRN-Ensemble 95.54% 97.14%
(Brock et al., 2016)
struction step corresponds to one object class in Ro-
tationNet. In total, there are 137 steps; in every class
20 different 2D images are rendered from spherical
distributed camera positions on a dodecahedron as
shown in Figure 2. The RGB color space is used
for the images without any additional textured back-
ground. In this way, our test differs from (Kanezaki
et al., 2018) as they use gray-scaled 3D models with-
out any background from the ModelNet database.
Furthermore, RotationNet adds a so-called incor-
rect view class for a better stability of the unsuper-
vised pose estimation. Together with the 137 instruc-
tion step classes, the total number of classes sums up
to 138.
According to the use case of an AR system the
Figure 2: For each of the 137 instruction steps of the “Air-
port Rescue Vehicle”, 20 views are rendered. The shown
images depict the complete model; i.e. the result of the last
instruction step.
network structure of the machine learning framework
has been adopted: the input layer is extended to fit
our model database, which consists of 137 classes and
one additional class for the incorrect view. The output
layer supports all numbers of classes and 20 views per
class which results in 2 760 output parameters. The
hidden layers and the order remain. (Kanezaki et al.,
2018) compare different CNN structures on their ac-
curacy using the ModelNet database. The main re-
sults are listed in Table 2. The best compromise be-
tween accuracy, memory size and number of parame-
ters is AlexNet (Krizhevsky et al., 2012). Its accuracy
is 1% lower than the best one but uses fewer parame-
ters and has less memory consumption.
Table 2: Comparison of four different algorithms, which
are used by RotationNet on ModelNet10 and ModelNet40
database.
Algorithm Parameters Memory Accuracy
AlexNet 60.2M 1.8GB 96.4%
(Krizhevsky et al., 2012)
VGG-M 102.2M 5.3GB 97.4%
(Chatfield et al., 2014)
ResNet-50 24.2M 7.1GB 96.9%
(He et al., 2016)
ResNet-18 11.6M 2.5GB 96.0%
(He et al., 2016)
The learning rate and momentum for the training
process in our setting are the same as published in
RotationNet. Without using any GPUs the training
process with our database takes about two days using
54 Intel Xeon
R
CPUs at 2.60GHz with batch size 52.
The network output layer values are the probabil-
ities for every class, including the incorrect view and
all pose estimations per class. The best view position
is chosen by taking the highest probability value of a
class without the incorrect view; i.e., inter-class prob-
abilities are taken into account. This means not only
one specific class is used to predict the pose, but more
than one can be used for one prediction result.
The decision, which class matches best is calcu-
lated by the maximum value of the probability prod-
uct of the views and classes. The product of all view
probabilities gives the prediction for the class and its
viewpoint; i.e., the prediction of the class and pose is
a probability maximization over a set of images.
4 EVALUATION
In order to evaluate the machine learning system,
three experiments have been designed using different
Scene Understanding and 3D Imagination: A Comparison between Machine Learning and Human Cognition
233

test sets; i.e. with different views on the “Airport Res-
cue Vehicle” CAD model. In each test, a set of im-
ages form the input for the classification task. Every
set merely contains images from one class, one in-
struction step respectively, with different, known and
unknown view positions.
4.1 Training Positions
In the first test series, all the images that have already
been used to train the system are reused to test the
system. In detail, for each class (137 in total) the 20
images of the pre-defined dodecahedron camera posi-
tions (see Figure 2) are used, and the system should
return the correct class (main objective) and the cor-
rect pose (secondary objective).
4.2 Unknown Positions
The second test series uses the same CAD model with
new camera positions. 24 view positions, which are
not included in the training set, are distributed equally
on a sphere according to the distribution suggested
by (Schinko et al., 2011). In other words, the test set
is disjunct to the training set.
4.3 Real Images
The final test series consists of real-life captured im-
ages. Using a video camera a sequence of images
is captured of one instruction step and the sequen-
tial frames are used as input for the trained net-
work. Each image has been converted to RGB color
space, cropped to aspect ratio 1 : 1, and re-sampled to
256 × 256 pixels to meet the requirements of the sys-
tem for input images. Figure 1 (right) shows an ex-
ample frame, which has been extracted from a video
at an early stage of the assembly.
4.4 Results
For every experiment the success rates for the cor-
rectly identified construction step is referred to as
Top-1; the correct construction step within the clas-
sification set with the five highest probabilities is re-
ferred to as Top-5. The results of our experiments are
listed in Table 3.
The Top-1 success rate of the test series using im-
ages already used to train the system is 8.03%. The
Top-5 success rate of this test series is 27, 74%, which
is a rise compared to the Top-1 rate by a factor of
3.45. If the test series comprehends newly rendered
images exclusively used for testing purposes with un-
known positions the success rates drop to 4.38% for
Table 3: Top-1 and Top-5 accuracy rates of the three test
series with (1) rendered images already used for training,
with (2) newly rendered images exclusively used for testing
purposes, and with (3) real images captured using a video
camera.
Test Set Top-1 Accuracy Top-5 Accuracy
Training Positions 8.03% 27.74%
(see Section 4.1)
Unknown Positions 4.38% 7.30%
(see Section 4.2)
Real Images 0.73% 0.73%
(see Section 4.3)
Top-1 and to 7.30% for Top-5, respectively. In the
real-world scenario, the success rates drop to 0.73%
in both categories, Top-1 and Top-5. A detailed anal-
ysis of these results reveals several challenges.
The first problem is the strong reduction of the
success rate due to external influences. The real video
sequences do not only show the CAD model, but
sometimes also not yet assembled parts, packaging
material, and everyday objects that happen to be in the
video. These things have not been learned and there-
fore lead to false classification results. A reduction of
external influences significantly improves the result;
nevertheless, deviations in the video image from the
trained data remain: light settings, shadows, distor-
tion, etc.
The second problem is the homogeneous data
space. The homogeneity can be illustrated by two
Figures: Figure 3 shows the ImageNet benchmark and
Figure 4 shows the instructions to assemble the CAD
model.
The differences between any two images of the
ImageNet benchmark (Deng et al., 2009) are much
greater than the differences in the construction man-
ual; there, only a few pixels change per class, and de-
pending on the view point even no pixels may change
at all. This degree of homogeneity is also a challenge
for humans.
Furthermore, this problem is intensified by the
used metric. From an application point of view, the
subdivision into 137 classes may seem reasonable due
Figure 3: A random selection of two root-to-leaf branches
of the ImageNet benchmark. Image source: (Deng et al.,
2009).
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
234
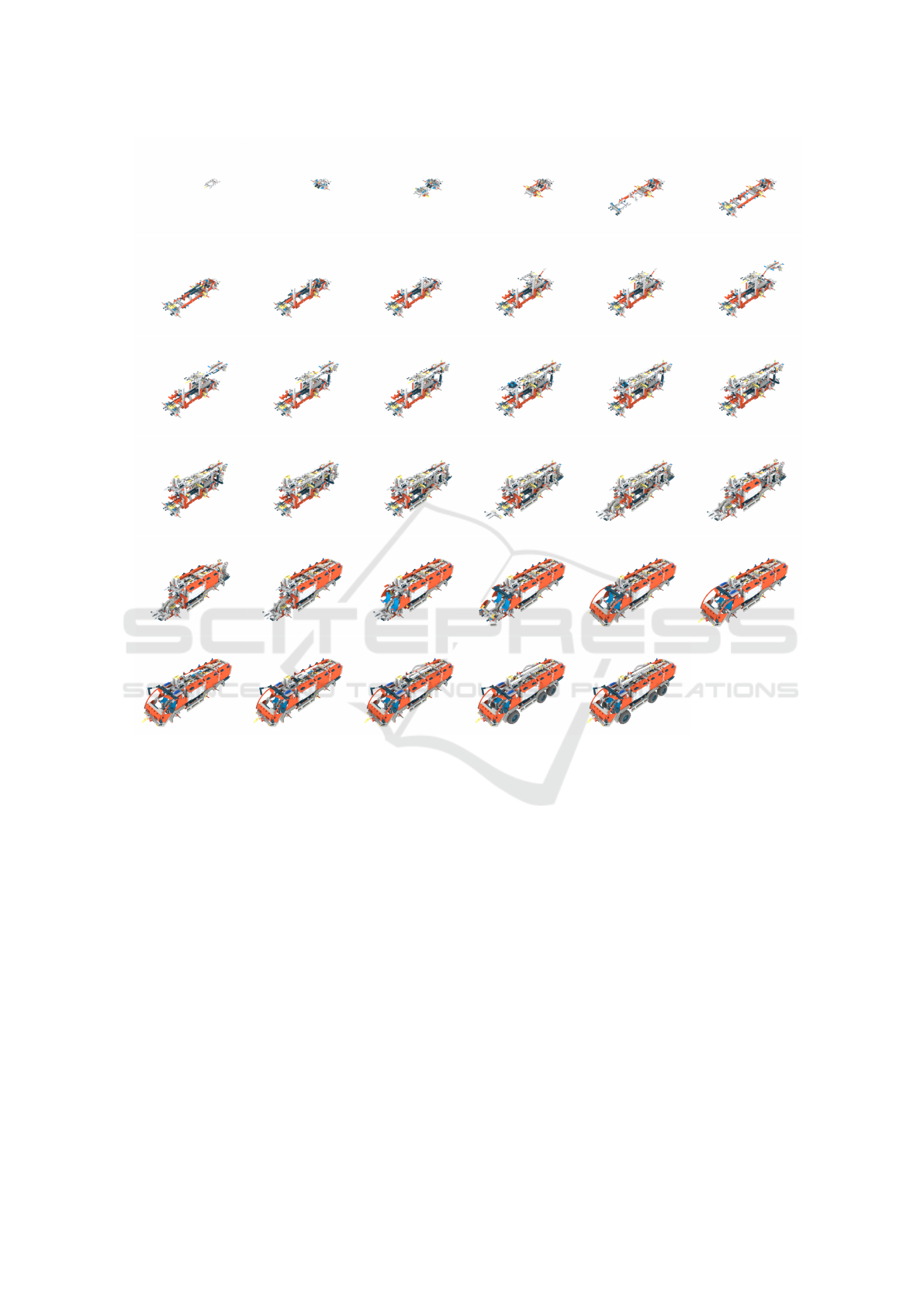
step #1 step #5 step #9 step #13 step #17 step #21
step #25 step #29 step #33 step #37 step #41 step #45
step #49 step #53 step #57 step #61 step #65 step #69
step #73 step #77 step #81 step #85 step #89 step #93
step #97 step #101 step #105 step #109 step #113 step #117
step #121 step #125 step #129 step #133 step #137
Figure 4: The construction of the “Airport Rescue Vehicle” comprehends 137 instruction steps. This overview shows the
result after every fourth instruction step. All views are rendered with the same camera perspective. Differences between
individual steps are not always apparent from all views.
to the corresponding number of construction steps;
from a machine learning point of view, this large num-
ber of classes with marginal differences makes little
sense. For example, the construction steps #69 to #77
show only minimal visual changes; even if the image
classification returns all Top-5 hits within this inter-
val, in 4/9 (44%) of the cases the correct result is not
present.
5 SURVEY
In order to interpret the gained results appropriately,
a survey has been performed to compare its perfor-
mance with humans. The intention is to have a ref-
erence success rate on how well humans estimate the
presented instruction step. The survey results are then
compared with the experiments described in the Sec-
tions 4.1 and 4.2. Due to the metric problem men-
tioned above, we measure the distance (number of
steps) between the predicted result and the ground
truth.
5.1 Set-up
The survey consists of a simple questionnaire con-
taining two parts. The first part is a simplified con-
struction manual similar to Figure 4. It comprehends
M = 40 different 2D images rendered from one spe-
cific camera position. The camera position is the same
for all 40 images. As in Figure 4, the views were
selected at equal distances between the construction
steps. The second part is the answer sheet with Q = 16
different 2D images at different assembly stages with
Scene Understanding and 3D Imagination: A Comparison between Machine Learning and Human Cognition
235

Table 4: This overview lists the results of the machine learning approach based on RotationNet compared to test persons
as assessed in the survey. It shows the error distribution measured as deviation between the correct instruction step and the
estimated instruction step by the machine learning system resp. the guessed instruction step in the survey.
Test Set
Minimum
First
Quartile
Median
Third
Quartile
Maximum
Mean
Standard
Deviation
Training Positions 0 0 1 4 24 3.219 4.828
(test size n = 2740)
Unknown Positions 0 3 8 16 36 10.175 8.875
(test size n = 2740)
Survey 0 0 1 5 56 4.329 7.108
(test size n = 1056)
varying camera positions. The stages and the camera
view points have been chosen randomly.
All participants were asked to find the best corre-
spondence between the 16 question images to the 40
construction images. A single choice had to be made
for each question, whereas the same answer could be
given multiple times on different questions. There has
been no time limit to answer the questionnaire.
5.2 Evaluation
The survey was printed on paper in high quality and
in high resolution. They have been completed by em-
ployees and members of the institute as well as by
master students. N = 69 attendees took part in the
survey; from these, A = 66 completed and fully filled
out questionnaire forms were returned. Three ques-
tionnaires were not completed in full or did not return
at all. As a consequence, the return rate is r = 95.7%.
deviation / error
training
positions
unknown
positions
survey
Figure 5: The error distribution as listed in Table 4 as Box-
and-Whisker plot. The many outliers in the survey show
that some people have clear problems with the 3D imagina-
tion task.
The results of the machine-learning-based ap-
proach using RotationNet and the survey are com-
pared to each other: the results of the configurations
described in Section 4.1 and in Section 4.2 are re-
ferred to as Training Positions and Unknown Posi-
tions, respectively; the survey results are referred to
as Survey. All results are listed in Table 4 and visual-
ized in a Box-and-Whisker plot in Figure 5.
With real images the RotationNet algorithm has
an accuracy on the scale of a random process. Using
rendered images, the accuracy improves significantly
(see Table 3). As a consequence, only the tests with
rendered images are analyzed further: testing the ma-
chine learning system with images already used dur-
ing the training phase, the system achieves an error of
3.219 on average; i.e. the prediction of the instruction
step is on average 3.219 steps off. In case of new im-
ages, which are unknown to the trained system, the
error rises to a difference of 10.175 steps on average.
The average human error measured by the survey is
4.329 steps; i.e. the human performance is clearly bet-
ter than the machine learning system with untrained
images. With trained images, the machine learning
system is slightly better. However, the improvement
is not significant: since both data sets do not follow
a normal distribution, and no common distribution
can be assumed either (according to Kolmogorov-
Smirnov tests), we determine the confidence intervals
of the expected values according to (Oliphant, 2006).
The confidence intervals of the expected errors remain
disjunct up to p = 91.9% – a value, which is usually
considered to be non-significant.
6 CONCLUSIONS
The aim of the paper is to test machine learning ap-
proaches represented by the best algorithm according
to the ModelNet benchmark (as Sep. 2019) in a prac-
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
236

tical application in order to find out its real-life us-
ability. For this use-case we generated a database of
an instruction step-based 3D CAD model and used it
to train the instructions using RotationNet. The ob-
jective is to predict the current instruction step based
on a simple image of the current assembly stage. As a
second means for the test, the prediction success rate
of humans is tested in a survey. The combined inter-
pretation of machine learning results and survey re-
sults reveals limited applicability of RotationNet for
real-life purposes.
6.1 Lessons Learned
We have identified some challenges that RotationNet
faces. A vast amount of difficulties have to do with
the image resolution used. The input image resolu-
tion of RotationNet is limited to a size of 256 × 256
pixels. This leads to the fact that important details are
hardly visible in many CAD renderings in this reso-
lution. Furthermore, common cameras are featured
with a much higher resolution and their captured im-
ages have to be scaled down for RotationNet. The
down-scaling process affects the details in the target
image negatively.
The viewpoints of the training data are equally
distributed but the amount of the overall viewpoints
is not very high. Considering the fact that arbitrary
viewpoints of CAD models can be rendered with lim-
ited effort (compared to taking photographs), we sug-
gest a higher resolution of viewpoints on a sphere. We
expect that the training data per class rises and that the
number of unknown positions will be reduced. This
might lead to a better recognition of minimal details
of the object model.
Another issue is the invisibility of certain assem-
bly steps. The result of neighboring instruction steps
look almost identical when the model is near to com-
pletion. This effect occurs when added bricks are oc-
cluded by others in the actual view.
Furthermore, when applying the machine learning
system to a real-life scenario, there is always a back-
ground behind the object model. The background
information includes background noise and indirect
model information such as local or global illumina-
tion and shading. The used training images, however,
do not contain any background information or noise at
all. Currently, it is not clear how to train a network to
handle background noise without having to manually
capture many different backgrounds at unacceptably
high costs.
Finally, the survey shows that it is difficult for the
human eye to distinguish the instruction steps from
each other as well and to assign them to the right im-
age. The viewpoints have a strong influence on the de-
tection of the right step and the low resolution makes
it difficult to identify the right images.
6.2 Improvements
Using a higher resolution for the images is the most
important step when improving RotationNet in order
to get more detailed information of the model per im-
age. This improvement effects the granularity of de-
tails and the distinction between the instruction steps;
this means that the differences between the single in-
struction steps raises. In a real-world scenario the im-
ages captured by a camera have a higher resolution
and must be down-scaled, which has negative influ-
ences on the preservation of details. To improve Ro-
tationNet, the input size and the parameters must be
adapted to a higher resolution which needs, however,
higher computational power.
The resolution of the viewpoints on the sphere is
equally distributed on a dodecahedron but the amount
of viewpoints is not sufficient for real-world use. A
higher resolution would lead to more training data
which can be learned by the system which would re-
sult in a better prediction. This improvement needs
higher computational power only during training and
not in the prediction phase which is a benefit for the
application of the system.
An overall challenge of all methods is the in-
fluence of the background on the recognition of the
model. The recognition and reduction of background
information may improve the prediction. At the train-
ing it is hardly possible to know in advance how the
background will look like in the productive applica-
tion. The captured scene can be indoor or outdoor,
with various illumination configurations. One option
may be a pre-segmentation of an image and to pass
only the extracted foreground to the prediction sys-
tem. An advantage of this approach is to leave the
network input image size untouched and crop the in-
teresting image parts to this size. A downside is the
difficulty to find the right segment within the image.
6.3 Contribution and Benefit
The presentation of the problems and the lessons
learned are an important contribution. Furthermore,
the provision of the LEGO
TM
CAD data set and
its renderings is a valuable benefit to the com-
munity. The CAD model is converted to a se-
quence of 3D models in Alias Wavefront OBJ for-
mat, and all sequence steps are available in com-
monly used image formats. They will be available
at: https://github.com/FhA-VC.
Scene Understanding and 3D Imagination: A Comparison between Machine Learning and Human Cognition
237

ACKNOWLEDGEMENTS
The authors acknowledge the generous support of the
Carinthian Government and the City of Klagenfurt
within the innovation center KI4Life.
REFERENCES
Alom, M. Z., Taha, T. M., Yakopcic, C., Westberg, S.,
Sidike, P., Nasrin, M. S., Hasan, M., Van Essen, B. C.,
Awwal, A. A. S., and Asari, V. K. (2019). A State-of-
the-art Survey on Deep Learning Theory and Archi-
tectures. Electronics, 8:292ff.
Brock, A., Lim, T., Ritchie, J. M., and Weston, N. (2016).
Generative and Discriminative Voxel Modeling with
Convolutional Neural Networks. International Con-
ference on Neural Information Processing Systems /
3D Deep Learning Workshop, 30:1–9.
Chatfield, K., Simonyan, K., Vedaldi, A., and Zisserman,
A. (2014). Return of the Devil in the Details: Delving
Deep into Convolutional Nets. British Machine Vision
Conference, 6:1–12.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A Large-scale Hierarchical Im-
age Database. IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), 12:248–255.
Elhoseiny, M., El-Gaaly, T., Bakry, A., and Elgammal,
A. M. (2016). A Comparative Analysis and Study of
Multiview CNN Models for Joint Object Categoriza-
tion and Pose Estimation. International Conference
on Machine Learning (ICML), 33:888–897.
Evans, G., Miller, J., Pena, M. I., MacAllister, A., and
Winer, E. (2017). Evaluating the Microsoft Hololens
through an Augmented Reality Assembly Applica-
tion. Degraded Environments: Sensing, Processing,
and Display (Proceedings of SPIE Defense and Secu-
rity), 10197:1–16.
H
¨
ane, C., Zach, C., Cohen, A., and Pollefeys, M. (2017).
Dense Semantic 3d Reconstruction. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
39:1730–1743.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in Computer Vision. Cambridge University Press.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep
Residual Learning for Image Recognition. IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), 19:770–778.
Kanezaki, A., Matsushita, Y., and Nishida, Y. (2018). Ro-
tationNet: Joint Object Categorization and Pose Es-
timation Using Multiviews from Unsupervised View-
points. IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), 21:5010–5019.
Kress, B. C. and Cummings, W. J. (2017). Towards the Ul-
timate Mixed Reality Experience: Hololens Display
Architecture Choices. Digest of Technical Papers, So-
ciety for Information Display, 48:127–131.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
ageNet Classification with Deep Convolutional Neu-
ral Networks. International Conference on Neural In-
formation Processing Systems, 25:1097–1105.
Kuznietsov, Y., St
¨
uckler, J., and Leibe, B. (2017). Semi-
supervised Deep Learning for Monocular Depth Map
Prediction. IEEE Conference on Computer Vision and
Pattern Recognition (CVPR), 20:2215–2223.
Mahjourian, R., Wicke, M., and Angelova, A. (2018). Un-
supervised Learning of Depth and Ego-motion from
Monocular Video Using 3d Geometric Constraints.
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), 21:5667–5675.
Oliphant, T. E. (2006). A Bayesian perspective on esti-
mating mean, variance, and standard-deviation from
data. Brigham Young University (BYU) Faculty Pub-
lications, 1877-438:http://hdl.lib.byu.edu/1877/438.
Qi, C. R., Su, H., Nießner, M., Dai, A., Yan, M., and
Guibas, L. (2016). Volumetric and Multi-view CNNs
for Object Classification on 3D Data. IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), 19:5648–5656.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115:211–252.
Saxena, A., Chung, S. H., and Ng, A. Y. (2006). Learn-
ing Depth from Single Monocular Images. Advances
in Neural Information Processing Systems, 18:1161–
1168.
Schinko, C., Ullrich, T., and Fellner, D. W. (2011). Simple
and Efficient Normal Encoding with Error Bounds.
Theory and Practice of Computer Graphics, 29:63–
66.
Sfikas, K., Pratikakis, I., and Theoharis, T. (2018). Ensem-
ble of PANORAMA-based convolutional neural net-
works for 3D model classification and retrieval. Com-
puters & Graphics, 71:208–218.
Su, H., Maji, S., Kalogerakis, E., and Learned-Miller, E.
(2015). Multi-view Convolutional Neural Networks
for 3d Shape Recognition. IEEE International Con-
ference on Computer Vision (ICCV), 11:945–953.
Tao, F., Zhang, M., and Nee, A. Y. C. (2019). Digital Twin
Driven Smart Manufacturing. Academic Press.
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X.,
and Xiao, J. (2015). 3d ShapeNets: A Deep Repre-
sentation for Volumetric Shapes. IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
18:1912–1920.
Zhou, T., Brown, M., Snavely, N., and Lowe, D. G. (2017).
Unsupervised Learning of Depth and Ego-Motion
from Video. IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), 20:1851–1860.
HUCAPP 2020 - 4th International Conference on Human Computer Interaction Theory and Applications
238
