Cooperative Maneuvers of Highly Automated Vehicles at Urban
Intersections: A Game-theoretic Approach
Bj
¨
orn Koopmann, Stefan Puch, G
¨
unter Ehmen and Martin Fr
¨
anzle
OFFIS e.V., Escherweg 2, 26121 Oldenburg, Germany
Keywords:
Highly Automated Driving, Cooperative Driving, Intelligent Transportation Systems, Traffic Management,
Intersection Management, Intelligent Infrastructure, Collaborative Sensing, Trajectory Planning, Traffic
Efficiency, Road Safety, Vehicle-to-Everything Communication, Game Theory, Traffic Simulation.
Abstract:
In this paper, we propose an approach how connected and highly automated vehicles can perform cooperative
maneuvers such as lane changes and left-turns at urban intersections where they have to deal with human-
operated vehicles and vulnerable road users such as cyclists and pedestrians in so-called mixed traffic. In
order to support cooperative maneuvers the urban intersection is equipped with an intelligent controller which
has access to different sensors along the intersection to detect and predict the behavior of the traffic participants
involved. Since the intersection controller cannot directly control all road users and – not least due to the legal
situation – driving decisions must always be made by the vehicle controller itself, we focus on a decentralized
control paradigm. In this context, connected and highly automated vehicles use some carefully selected game
theory concepts to make the best possible and clear decisions about cooperative maneuvers. The aim is to
improve traffic efficiency while maintaining road safety at the same time. Our first results obtained with a
prototypical implementation of the approach in a traffic simulation are promising.
1 INTRODUCTION
Mobility is a vital basis for individual freedom, an
indicator of social prosperity, and an important fac-
tor for economic growth (Lemmer, 2019). The ris-
ing need for mobility of people and goods poses ma-
jor challenges to administrations of cities and munic-
ipalities and stresses the existing infrastructure. In
the long term, the structural maintenance and replace-
ment of transport infrastructure is expected to involve
increasingly higher investment costs (Federal Min-
istry of Transport and Digital Infrastructure, 2016).
Besides the growing challenges for municipal ad-
ministrations, the increased traffic load also reduces
the quality of life of the citizens through increased
emissions and delays due to congestion. In 2018, Ger-
man drivers spent on average of more than 120 hours
in traffic jams (INRIX, 2019). At the same time, long
congestion periods and unadapted driving styles exac-
erbate the problems associated with increased air pol-
lution and environmental impact. Discussions on road
closures and driving bans resulting from high levels of
nitrogen oxides and particulates – whether effective or
not – can be heard in the press almost every day (Zeit,
2018; Tagesspiegel, 2019; Spiegel, 2019).
2
2
1
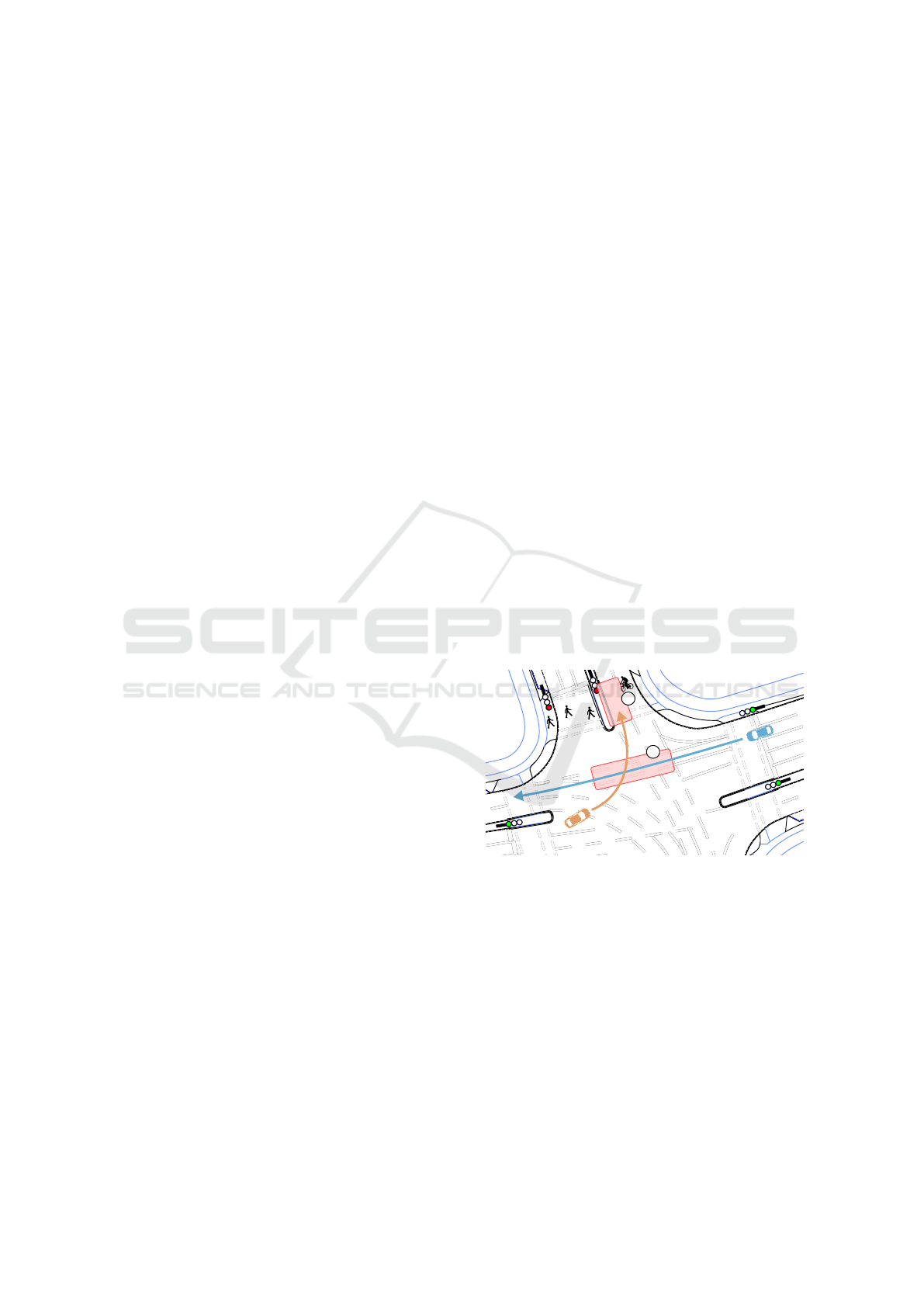
Figure 1: Exemplary Conflict Areas.
Intersections are a key element of today’s trans-
port infrastructure and have a significant impact on
inner-city traffic efficiency. At these junctions traf-
fic flows from different directions meet, which them-
selves consist of different road users – each with indi-
vidual goals and their own driving styles. Depending
on the active traffic light phase, conflict areas with
other road users arise while crossing the intersection.
Figure 1 shows an example of these areas resulting
from a left-turn scenario. After passing through on-
coming traffic (1), the orange-colored vehicle must
take crossing cyclists and pedestrians (2) into account.
Koopmann, B., Puch, S., Ehmen, G. and Fränzle, M.
Cooperative Maneuvers of Highly Automated Vehicles at Urban Intersections: A Game-theoretic Approach.
DOI: 10.5220/0009351500150026
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 15-26
ISBN: 978-989-758-419-0; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
15

While human drivers can have difficulties assess-
ing the speeds of other vehicles and the remain-
ing gaps in flowing traffic (Yan et al., 2007), dedi-
cated sensor systems can reliably perform this task.
The use of connected and highly automated vehi-
cles (CHAVs) in inner-city traffic could therefore help
to improve the use of remaining free spaces and to
achieve a higher capacity. In addition, however, fur-
ther challenges arise in the reliable detection of cy-
clists and pedestrians – also called vulnerable road
users (VRUs) – that share green light phases with
motorized road users. Due to the possibility of be-
ing covered by vehicles parked at the roadside and the
high complexity of their dynamic behavior, this task
poses a high degree of difficulty for human drivers in
human-operated vehicles (HVs) as well as for assis-
tance systems and automated driving functions.
In order to master the challenges of connected
and highly automated driving at urban intersections,
a common approach is to support the vehicle sen-
sors with infrastructural sensors and communicating
information systems to increase sensing ranges and
reliability (Burgstrahler, 2017). At the same time,
this solution enables connected participants to receive
comprehensive real-time information about the pre-
vailing traffic situation in remote and poorly visi-
ble areas. In addition, traffic light phases as well
as information about the future signal course can
be transmitted. Equipped with vehicle-to-everything
(V2X) transceivers and suitable environmental sen-
sors, specialized systems like traffic management sys-
tems (TMS) could ultimately generate behavior rec-
ommendations to actively support CHAVs in a safe
and efficient crossing of intersection areas.
Current research gives reason to assume that co-
operation of CHAVs with each other, HVs, and VRUs
can increase traffic efficiency while ensuring at least
the same level of road safety. For this reason, it is
likely that in the future not only the automation of in-
dividual vehicles, but also their safe interaction with
different road users will be an important aspect. With
the increasing prevalence of automated vehicles and
their growing pervasion in mixed traffic the consid-
eration of cooperation brings new challenges. In this
context, the following research questions are of par-
ticular importance for the present work:
1. How can unambiguous, joint decisions be made
whether or not to perform cooperative maneuvers,
taking into account global and local goals?
2. Is it possible to increase traffic efficiency at urban
intersections through cooperation?
3. If so, what conditions must be met in order to pro-
mote an efficiency gain? Which conditions may
lead to deteriorations?
In order to provide a solution for the first ques-
tion as well as some hints on answering questions two
and three, we will present a novel, decentralized co-
operation approach that was developed within the na-
tional research project Digitaler Knoten 4.0 (Digitaler
Knoten 4.0, 2019). The defined concepts explicitly
address the prevalence of mixed traffic that can be ex-
pected in the long transition phase of CHAVs to reg-
ular operation and could be evaluated directly in the
field. We propose a game-theoretic approach which
can be implemented algorithmically and allows coop-
eration candidates to take their own view into account
when making decisions about performing a cooper-
ative maneuver or rejecting a specific request. As a
prerequisite, we assume the existence of an intelligent
TMS equipped with sensors and actuators, which has
a global view of the traffic situation and – based on
predictive path planning – can derive and communi-
cate assessments for meaningful cooperative maneu-
vers. The approach is evaluated by using a proto-
typical implementation on the basis of Simulation of
Urban Mobility (SUMO) (German Aerospace Center,
2018) that enables us to see some first effects.
This paper is structured as follows. In Section 2,
existing work on the interaction of CHAVs at urban
intersections is discussed. Afterwards, we provide a
brief overview of a selected set of game theory con-
cepts. In Section 4, the top-level architecture and a de-
scription of relevant characteristics of the traffic par-
ticipants involved are given. Section 5 presents the
developed concepts. This includes the time division
of an intersection crossing by a CHAV into phases as
well as a detailed investigation of the cooperation ap-
proach. In order to analyze the effects of the selected
approach, we first describe the implementation of the
traffic simulation and the individual experiments in
Section 6. Subsequently, a discussion of the results
is conducted. In Section 7, we conclude the paper and
give an outlook on future enhancements.
2 STATE OF THE ART
According to (Wu et al., 2012), cooperative driving
was first introduced through the use of inter-vehicle
communication to perform lane changes and merging
maneuvers in the context of platooning. It was fol-
lowed by a line of research to guide vehicles through
intersections using the Autonomous Intersection Man-
agement (AIM) (Dresner and Stone, 2008; Dresner,
2009) approach. The focus is dedicated to avoid crit-
ical situations as well as collisions and to adapt the
passing sequence of approaching vehicles in order to
improve the junction’s capacity.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
16

A major challenge regarding the trajectory plan-
ning algorithms is noted to be the “complexity of
cooperative driving planning”, because every vehicle
has to be considered individually. To this category
belong Frese and Beyerer with their work about plan-
ning cooperative motions of cognitive automobiles by
proposing a tree search algorithm and Gr
´
egoire et al.
who propose a mathematical framework to decom-
pose the cooperative motion planning problem for ve-
hicles at intersections to “a discrete scheduling prob-
lem (priority graph) and a continuous problem formu-
lated in the abstract coordination space” (Frese and
Beyerer, 2010; Gregiore et al., 2012). Kneissl et al.
presented a model predictive control based algorithm
for automated intersection crossings whereby vehi-
cles do not have to share private data (Kneissl et al.,
2018). All these approaches are based on a central
controller for CHAVs or at least on autonomously ex-
ecuted cooperative maneuvers. Liu et al. extended
the previous research by suggesting a hybrid approach
where an intersection management system plans col-
lision free trajectories but vehicles are able to arrange
their trajectory individually (Liu et al., 2019). This
approach is simplified by the fact that conflict areas
first have to be reserved and vehicles drive as platoon
over the intersection at constant speed.
None of the previously mentioned approaches
considered the execution of cooperative maneuvers in
mixed traffic where the somewhat optimal path plan-
ning result from AIM has to be combined with uncon-
trolled traffic participants, whose dynamic behavior is
hardly predictable. According to Sharon and Stone,
“AIM has been shown to provide little or no improve-
ment” if less than 90 % of the vehicles are driving au-
tonomously so that the approach cannot be smoothly
applied to mixed traffic. They addressed this gap with
the development of the Hybrid Autonomous Intersec-
tion Management protocol (Sharon and Stone, 2017).
It builds upon a reservation-based “First Come, First
Served” extension of the AIM protocol and shall im-
prove the transition period from mostly HVs to solely
CHAVs comprised traffic. In (Sharon et al., 2018), a
centralized manager controls a set of so-called com-
pliant agents while other self-interested agents coex-
ists within the network. However, cooperative maneu-
vers between CHAVs are not taken into account.
All existing approaches for the interaction of
CHAVs and HVs have in common that they only con-
sider global goals such as collision avoidance or an
increase of traffic efficiency. They do not take into
account the individual pursuit of local goals, which
may result from manufacturer-specific features or the
individual preferences of vehicle occupants. The im-
portance of this limitation is further strengthened by
legal and safety constraints of the implementing man-
ufacturers. In this context, a common paradigm is
the strict rule that every safety-critical driving deci-
sion must be made by the vehicle controller itself. To
comply with this demand, all conceivable information
provided by other participants and infrastructure sys-
tems must only be used to extend a vehicle’s “field of
view” and to increase the confidence of its own situa-
tion assessment. Only if external requests to achieve
global goals are consistent with local goals, then they
may influence driving decisions. This style of nego-
tiating cooperative driving maneuvers, taking into ac-
count global and local goals while exclusively relying
on vehicle-based decision making, is – to the best of
our knowledge – not subject of current research.
3 GAME THEORY
To design a mechanism enabling a joint, unambigu-
ous negotiation process for cooperating CHAVs, we
employ a set of commonly used game theory concepts
(von Neumann and Morgenstern, 1953). According
to Maschler, game theory subsumes the “methodol-
ogy of using mathematical tools to model and analyse
situations of interactive decision making” (Maschler
et al., 2013). The so-called players with possibly dif-
ferent goals influence the further outcome of other
players with each of their decision. It can provide
valuable services in the analysis of complex eco-
nomic phenomena as well as in everyday decisions,
because it deals with an enormous variety of differ-
ent decision-making situations and makes suggestions
how good decisions can be achieved (Winter, 2015).
An important question that has to be answered be-
fore applying game theory is which kind of game fits
best for the given situation. It is possible to distin-
guish between static or dynamic games and games
with complete or incomplete information (Winter,
2015). In static games, players act simultaneously
without knowing how other players have behaved or
will behave. They are also commonly known as si-
multaneous or concurrent games (de Alfaro and Hen-
zinger, 2000). Conversely, in dynamic games, which
are often referred to as turn-based, sequential, or re-
peated games, players act in a fixed order (de Al-
faro and Henzinger, 2000; Maschler et al., 2013). In
games with complete information, each player is well
informed about the other players and can practically
put himself in their shoes. A player is also aware of all
scores, but usually has no knowledge of the individual
strategies. Games with incomplete information can
result, for example, from strongly restrictive rules, in-
formation hiding policies or technical limitations.
Cooperative Maneuvers of Highly Automated Vehicles at Urban Intersections: A Game-theoretic Approach
17

Within a game each player can have an amount of
strategies – good ones which lead to “win” the game
as well as bad ones which lead to “loose”. A strategy
combination describes a combination of one strategy
per player, a set of all strategy combinations define
all possible game sequences. Each player can rate his
strategies with a measure. This indicates the advan-
tage or benefit of the outcome of the game from the
player’s perspective. Within the framework of game
theory, this measure is referred to as payoff.
The objective of game theory is to find an optimal
strategy combination based on the payoffs of the in-
dividual players. From a player’s point of view, the
primary goal is to achieve the highest possible payoff
by selecting the “best” strategy combination in order
to “win” the game. In this context, an optimal strat-
egy combination from a global perspective is referred
to as Nash equilibrium (Nash, 1951). If the equilib-
rium is played, none of the players would unilaterally
change their mind, because no other strategy could
achieve a higher payoff or an improvement. It there-
fore allows distributed strategy finding without addi-
tional communication, just by rational reasoning.
A common representation for games with a lim-
ited number of strategies are so-called payoff matri-
ces. They list the strategies of one player in rows and
the strategies of another in columns. Each cell thus
contains the combined payoffs for the combination of
both individual strategies. We will use this form of
representation and the underlying theory to select the
best possible strategy combination and to decide in a
distributed manner whether or not to perform the re-
sulting cooperative driving maneuver.
4 TOP-LEVEL ARCHITECTURE
In order to control the flow of mixed traffic at urban
intersections, the Digitaler Knoten 4.0 project consor-
tium developed a reference architecture, which can be
understood as a blueprint for the digitalization of ur-
ban intersections. Here, the extensive expert knowl-
edge and know-how from previous projects of the in-
dustrial and academic partners involved were used to
provide a comprehensive and consistent architecture
to guide the development of future transport systems.
At the highest level, the proposed reference archi-
tecture is divided into two (sub-)architectures Auto-
mated Vehicle and Traffic Management System, which
are illustrated in Figures 2 and 3. While the commu-
nication between these subsystem classes is realized
by means of a third reference architecture Communi-
cation Channel, their individual components are not
explained in detail for the sake of simplicity.
Planning + Control
Signal
Capturing/
Processing
Feature
Extraction
Situation
Assessment
- Odometry
- …
Environment
Model
Sensor /
Actuator
Model
- Object Recognition
- Object Tracking
- …
- Digital Maps
- Road Markings
- …
- Ego Vehicle Motion
- …
Trajectory Planning
Safe Corridor Prediction
Trajectory Segment
Execution
Desired Trajectory Segment
Dynamic Control
Feedback control for micro
segments / curves
Sensor Actuator Control
Feedback control for
driving dynamics
Decision Making
Routing, Navigation, Cooperation
Vehicle
Dynamics
Model
Mission
Space
Model
Vehicle
Sensors
Environmental Sensors
Localization Sensors
Selection of
Relevant Messages
HMI
Actuators
Communi
-
cation
Knowledge
Base
Commu
-
nication
HMI
Referenzarchitektur „Automatisiertes Fahrzeug“1
Funktionaler Architekturentwurf (Ver. 1.2)
Informationsfluss
Rückkopplung
Modellintegration
Figure 2: (Sub-)Architecture Automated Vehicle.
Referenzarchitektur „Verkehrsinfrastruktur“2
Funktionaler Architekturentwurf (Ver. 1.2)
Informationsfluss
Rückkopplung
Modellintegration
Evaluation
Situation
Assessment
Planning + Control
Decision Making
Signal
Capturing/
Processing
Feature
Extraction
- Object Recognition
- Object Tracking
- …
Environment
Model
Selection of
Relevant Messages
Infrastructure
Model
Environmental Sensors
Traffic
Lights
Communi
-
cation
Actuators
Sensor Actuator Control
Feedback control for
traffic guidance systems
Determination of
Traffic Light Status
Infrastructure Control
Selection of traffic light phases
and necessary notifications
Communi
-
cation
Handling of
Dynamic
Objects
Handling of
Static
Obstacles
Recommendations
- (Virtual) green filter arrow
- Lane change advices
- Cooperation initiations
Directives
- (Preventive) lane closures
- Road map adaptations
Information Services
- Signal predictions
- Hazard warnings
- Traffic monitoring
Knowledge
Base
Figure 3: (Sub-)Architecture Traffic Management System.
The two architectures in focus are layered archi-
tectures whose horizontal design is based on the com-
monly used “Sense-Plan-Act” paradigm. In this con-
text, each subarchitecture consists of six columns
that structure the underlying components according
to their functional purpose. Triggered by the input
events of the sensor components, the collected in-
formation is propagated successively through the in-
dividual segments and is aggregated to an encom-
passing real-time situational overview on which either
driving or control decisions can be made.
The (abstract) functional components, each rep-
resenting a set of possible implementations of re-
quired tasks, are arranged at different abstraction lev-
els according to their time resolution or activation fre-
quency – ranging from control-based algorithms on
lower levels to service-oriented concepts on higher
layers. While the first subarchitecture contains up to
five abstraction levels, the Traffic Management Sys-
tem has a simplified vertical design due to the lack of
proper motion and the comparatively low complexity
of the control tasks assigned to it.
In the following, some general properties of the
considered traffic participants will be put into con-
crete terms. While the reference architecture al-
ready provides a good overview of the functionality
of the technical systems involved, the assumptions
used about the equipment of the TMS have to be
concretized. In addition, suitable assumptions about
the physical properties and the dynamic behavior of
CHAVs, HVs, and VRUs will be formulated.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
18

4.1 Traffic Management System
As explained above, the use of an intelligent TMS is
a key element of our approach. In our vision, such
a system has the capability to send and receive V2X
messages with a minimum reception range of 200 m.
In addition, we assume it to be equipped with environ-
mental sensors that detect and track static obstacles
and dynamic objects within a sensing range of 150 m
in order to maintain a real-time situational overview
and to predict the future behavior of all participants.
As a third source of information, a TMS should be
linked to the traffic light system, which provides ac-
cess to the signal phases and future signal courses.
Based on the situational overview aggregated in
the environment and infrastructure models, the Deci-
sion Making component analyzes the current and an-
ticipated traffic situation in the intersection area. It
brings intelligence to the TMS and takes all high-level
control decisions related to the flow of mixed traffic.
Besides the transmission of infrastructure-to-vehicle
(I2V) messages, such as behavior recommendations
and hazard warnings, it controls the infrastructure ac-
tuators (e.g., variable message signs), and provides
evaluation services for traffic analyses.
4.2 Highly Automated Vehicles
While the CHAVs in focus are assumed to have au-
tomation levels from 4 to 5 (SAE International, 2018),
their individual driving tasks are (almost) completely
taken over. In accordance with the explanations on
the TMS, all decisions are drawn by a central Deci-
sion Making component. Every CHAV has the capa-
bility to send and receive V2X messages and comes
with a suitable set of environmental sensors.
Each CHAV moves at a maximum speed of
50 km/h and complies with all traffic regulations. Due
to the high degree of automation and the lack of hu-
man reaction time, a CHAV should also adapt to ex-
ternal events in significantly less than 1 s. At the same
time, conservative estimates of distances and time
gaps are used – the vehicle thus drives very defen-
sively and with foresight. While all CHAVs behave
prudently when interacting with other road users, it
is assumed that no cooperative maneuvers are per-
formed without using the proposed approach.
4.3 Human-operated Vehicles
In contrast to CHAVs, all HVs are assumed to have
automation levels ranging from 0 to 3 (SAE Interna-
tional, 2018). The driving task is therefore primarily
taken over by the human driver. For this reason, the
driving behavior is significantly influenced by his per-
sonality and state of health as well as his local knowl-
edge and individual goals, e.g., resulting from time
pressure or being on a “sightseeing tour”. The com-
munication with other road users is usually done by
simple light and hand signals. Although top-of-the-
range vehicles may already have the option to receive
V2X or I2V messages at these automation levels, it is
not considered to be the case for the majority.
Depending on the passenger’s preferences, a typ-
ical HV drives at a higher maximum speed of up to
60 km/h. In most cases, the driver adheres to the traf-
fic rules, but deviates from them in certain situations.
In addition, his reaction time is about 1 s. During the
journey of a HV the driver under- or overestimates
distances and time gaps due to the natural limitations
of his perception. The possibility of mental over-
load in unexpected situations results in a higher fail-
ure probability compared to CHAVs.
4.4 Cyclists and Pedestrians
The non-motorized road users, consisting of cyclists
and pedestrians, exhibit a comparatively low speed
compared to CHAVs and HVs. At the same time,
the safe prediction of their dynamic behavior poses
a major challenge due to the high complexity of the
underlying models and the possibility of fast direc-
tional changes. While appropriate concepts to handle
non-compliant behaviors exist, we limit ourselves to
the assumption that VRUs move on bicycle paths or
sidewalks and behave according to the traffic rules.
5 COOPERATION APPROACH
There is a wide variety of conceivable scenarios that
can provide benefits for the participating road users
and municipal administrations. In the further course,
the cooperative lane change (CLC), whose basic prin-
ciple is illustrated in Figure 4, will be subjected to
closer examination. It was extensively studied as a
further part of the Digitaler Knoten 4.0 project.
At the beginning of the scenario, the orange-
colored CHAV
1
approaches a static obstacle
×
,
such as a vehicle at the end of a congestion or a nar-
rowing of the roadway. While the CHAV in focus
would normally have to wait, a negotiation with the
turquoise-colored CHAV
2
on the adjacent lane al-
lows an agreement on performing a CLC that enables
an efficient merge into flowing traffic. In order to
avoid unnecessary strong effects on the second coop-
eration partner or other dangerous situations, a thor-
Cooperative Maneuvers of Highly Automated Vehicles at Urban Intersections: A Game-theoretic Approach
19

1
2
X
= Traffic Management System
= Static Obstacle
X
1
= Cooperation Partner 1
2
= Cooperation Partner 2
Figure 4: Cooperative Lane Change.
ough analysis of the traffic situation and suitable con-
cepts for a distributed assessment are required.
While the interaction of multiple traffic partici-
pants would be conceivable and could have more far-
reaching effects on traffic efficiency, we will focus on
the cooperation of only two CHAVs to explain the ba-
sic principles of the underlying concepts.
5.1 Time Subdivision into Phases
In order to guide the development of the overall coop-
eration approach and to enable a structured analysis
of the resulting traffic situations, we decided to divide
the journey of each CHAV through the intersection
area into three so-called cooperation phases.
5.1.1 Subscription Phase
The aim of this first phase is to improve the situa-
tional awareness of the CHAV in focus and the TMS
by communicating vehicle-specific data and exchange
information about the traffic situation to set the stage
for cooperative maneuvers. In a first step, a unique
vehicle ID, a global driving intention (e.g., turn left,
straight ahead, turn right), and the intended destina-
tion lane are sent to the TMS. The reception of the
message is confirmed to the CHAV by sending a de-
tailed response containing the current signal phase of
the traffic lights, their future signal course, a digital
map of the intersection as well as comprehensive in-
formation about static obstacles and dynamic objects.
According to the assumptions made in Sec-
tion 4.1, it is assumed hereinafter that the subscription
phase is completed at least 150 m before the stop line
of the respective lane. If the subscription of a CHAV
is not completed in time, the crossing must take place
without making any benefits from the additional ser-
vices provided by the TMS, including the support in
cooperative maneuvers. Of course, an adaptation of
the assumed range constraint is possible to accommo-
date other intersection geometries.
5.1.2 Execution Phase
From the perspective of a CHAV, the primary aim
of the execution phase is to cross the intersection
safely and as efficiently as possible. During the rule-
compliant approach of the CHAV to the stop line,
the interaction with other road users takes place as it
would do even without the existence of an intelligent
TMS. Based on the information acquired in the first
phase, however, an earlier decision can be made for
or against passing the intersections traffic lights.
At the same time, the TMS aims to increase the
junction’s capacity, prevent congestion, and reduce
emissions. It makes use of all available information
about the current positions, velocities, driving inten-
tions, and the planned destination lanes of the sub-
scribed CHAVs and other participants, its knowledge
about the intersection geometry, static obstacles as
well as dynamic objects, and identifies potential con-
flict situations between CHAVs to be solved. In a sec-
ond step, the TMS tries to derive feasible solutions
to these conflicts that increases traffic efficiency, e.g.,
through behavioral predictions and the recognition of
previously learned patterns within the traffic scene.
Subsequently, promising solutions are delivered to
the participating CHAVs in the form of cooperation
recommendations. The CHAVs initiate distributed as-
sessments of the traffic situations based on their own
situational overviews and exchange their evaluations,
which can ultimately lead to joint decisions and the
execution of the proposed cooperative maneuvers.
5.1.3 Unsubscription Phase
In the course of the unsubscription phase, the infor-
mation collected during the crossing of the intersec-
tion is fed back to the TMS. By receiving the pe-
riodically sent positions and velocities of all exiting
CHAVs, further information can be obtained on traf-
fic density and the likelihood of congestion in the
individual exits. After leaving the reception area of
the V2X transceiver, each CHAV is indirectly unsub-
scribed by its removal from the situational overview.
5.2 Cooperation Procedure
In contrast to almost all existing publications, we pro-
pose a decentralized cooperation approach for the ne-
gotiation of cooperative maneuvers. For this purpose,
the TMS serves as a central source of information
and recommendations that actively supports the ap-
proaching CHAVs as they cross the intersection. At
the same time, it includes other traffic participants
using suitable sensors and actuators. The involved
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
20
TMS CHAV 1 CHAV 2
D D
S
1
Subscription 1
S
2
Subscription 2
R , R
Recommendation
R , R
Recommendation
E
1
Evaluation 1
E
2
Evaluation 2
par
1
2
3
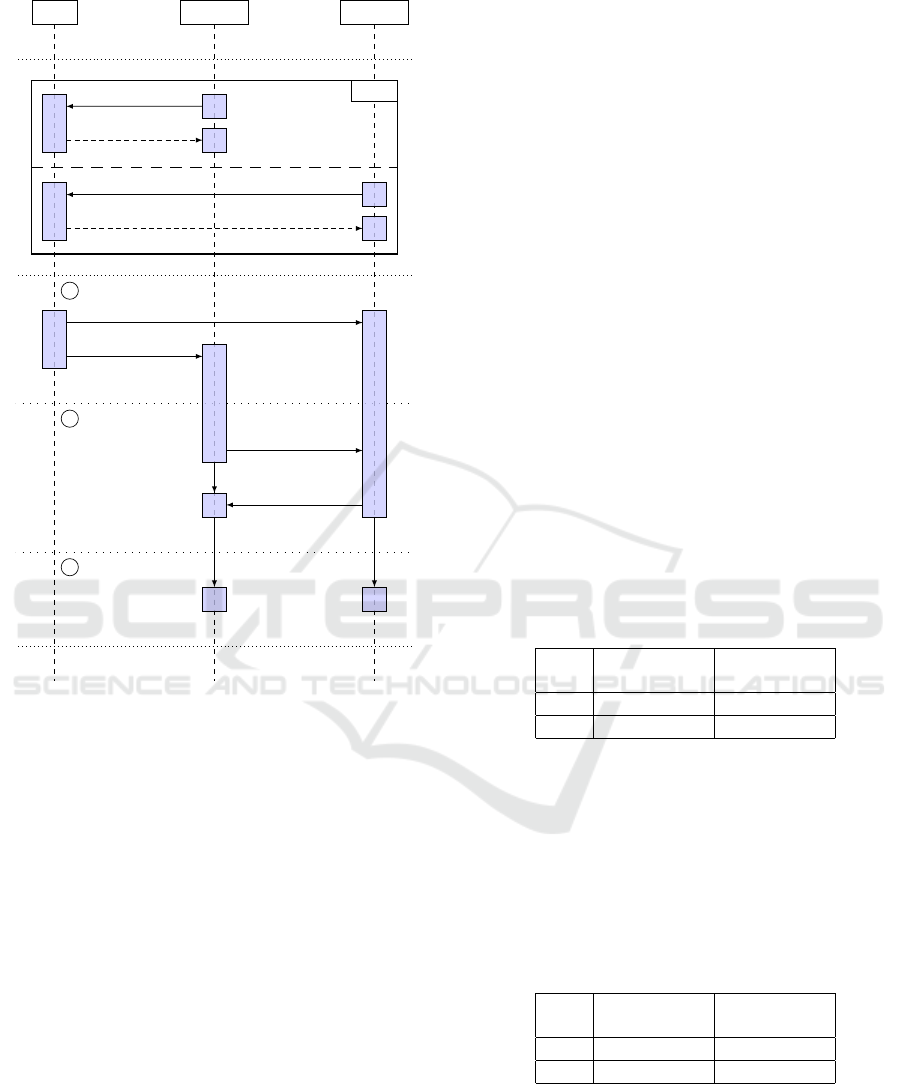
Figure 5: Time Sequence of Communication.
CHAVs agree decentrally on recommended driving
maneuvers or decide against their execution.
In order to give a clearer insight into the under-
lying concepts, Figure 5 provides an overview of the
intended communication flow. Following the distribu-
tion of a cooperation recommendation to the two in-
volved CHAVs
1
, an assessment of the proposed co-
operative maneuver and the resulting strategy combi-
nations is performed locally. Each vehicle then com-
municates the results of its assessment by means of
an evaluation
2
. The messages sent are also received
by the TMS and can be used to monitor the coopera-
tion process and improve behavioral predictions. As
a final step, the decision is made for or against the
execution of the cooperative maneuver
3
.
5.2.1 Cooperation Recommendation
As already described in Section 5.1.2, the TMS makes
use of all available information about the current po-
sitions, velocities, driving intentions, and the planned
destination lanes of traffic participants, its knowledge
about the intersection geometry, static obstacles as
well as dynamic objects, and identifies potential con-
flict situations between CHAVs to be solved. If such
a situation is identified in which an increase in effi-
ciency can be expected through the execution of a co-
operative driving maneuver, it is first checked whether
the vehicles involved are CHAVs. If so, their unique
IDs are stored to prepare the message exchange. Ad-
ditionally, the vehicle benefiting directly from in-
creased traffic efficiency is designated as first coop-
eration candidate (CHAV 1), while the other one is
denoted as second cooperation candidate (CHAV 2).
In the further course, suitable strategies for both
vehicles are identified or extracted from a strategy
catalogue based on expert knowledge and feedback
received from preceding vehicles during their indi-
vidual unsubscription phases. A strategy consists of
a pair of (abstract) longitudinal and lateral behavior
descriptions, which can be derived directly from the
cooperative maneuver and the given traffic situation.
With regard to the example shown in Figure 4, the
vehicle approaching the obstacle, which is referred to
as CHAV 1, is recommended to perform a CLC with
CHAV 2. Table 1 contains a list of exemplary strate-
gies that can be used to solve the imminent conflict
situation from the perspective of CHAV 1.
Table 1: Strategies for CHAV 1.
ID Longitudinal
Behavior
Lateral
Behavior
S1.1 Continue Lane change
S1.2 Decelerate Continue
On the other hand, the vehicle on the adjacent
lane, denoted as CHAV 2, is recommended to support
the CLC of its cooperation partner CHAV 1. Again, a
selected set of suitable strategies is listed in Table 2.
Of course, in realistic situations, considerably more
strategies would have to be taken into account, such
as changing lanes with simultaneous accelerations or
varying degrees of intensity of certain maneuvers.
Table 2: Strategies for CHAV 2.
ID Longitudinal
Behavior
Lateral
Behavior
S2.1 Decelerate Continue
S2.2 Continue Continue
Following the derivation of suitable strategies for
both participants, the initial payoff matrix R is gen-
erated, which is shown in Table 3. Each of its cells
represents a strategy combination that results from the
selection of one strategy for each cooperation candi-
date. At this point of time, all entries are empty, since
Cooperative Maneuvers of Highly Automated Vehicles at Urban Intersections: A Game-theoretic Approach
21
Table 3: Initial Payoff Matrix.
R
CHAV 2
S2.1 S2.2
CHAV 1
S1.1
( – , – ) ( – , – )
S1.2
( – , – ) ( – , – )
no valuations of the strategy combinations exist.
As a final step, the initial payoff matrix R as
well as the recommended strategy combination R,
which represents the most valuable solution in terms
of global goals, are transmitted to the CHAVs.
5.2.2 Evaluation and Decision Making
After receiving the recommendation, an indepen-
dent, in-vehicle evaluation of all strategy combina-
tions generated by the TMS is initiated. For this pur-
pose, each cooperation candidate evaluates the so-
lutions based of its own situational overview. Be-
sides the speeds of the road users involved, distances
between them and differential speeds, the predicted
future behavior of dynamic objects and local goals
of the CHAV could be included. While the evalua-
tion approach is manufacturer- and implementation-
specific, the payoffs can be understood as a function
of the results of two separate safety and efficiency
evaluations. The calculated payoffs are then filled into
the matrix entries as illustrated in Table 4.
Table 4: Evaluation of the Cooperative Maneuver.
E
1
CHAV 2
S2.1 S2.2
CHAV 1
S1.1
( 4 , – ) ( 3 , – )
S1.2
(-2 , – ) ( 1 , – )
E
2
CHAV 2
S2.1 S2.2
CHAV 1
S1.1
( – , 2 ) ( – , -2 )
S1.2
( – , 1 ) ( – , 0 )
Once all strategy combinations have been suc-
cessfully assessed, the exchange of the (so far only
half-filled) payoff matrices E
1
and E
2
proceeds in or-
der to merge them into two complete and consistent
copies of matrix D, one for each vehicle. In order
to make the game fair and safe, communication must
take place (almost) simultaneously. For the practi-
cal implementation of this approach, it is crucial that
no prematurely received evaluations of other players
must be used as a basis for one’s own evaluation. In
terms of game theory, it has to be a static game.
Table 5: Decision Making.
D
CHAV 2
S2.1 S2.2
CHAV 1
S1.1
( 4 , 2 ) ( 3 , -2 )
S1.2
(-2 , 1 ) ( 1 , 0 )
In Table 5, the determination of the Nash equi-
librium for the previously merged payoff matrix D
is shown. For this purpose, the strategy combination
with the highest payoffs for both cooperation candi-
dates is selected. If there is only one Nash equilibrium
(condition 1) that corresponds to the original cooper-
ation recommendation (condition 2), a clear, joint so-
lution has been found. If condition 1 does not apply,
the cooperation is rejected for safety reasons.
5.2.3 Execution of Cooperative Maneuvers
Within our approach, the determination of a Nash
equilibrium is defined as signing a binding contract
for performing the agreed strategy combination. Fol-
lowing an update of the situational overview, the
planned cooperative maneuver is executed using in-
vehicle trajectory planning and control algorithms.
In order to achieve a higher safety level during ex-
ecution, time bounds or reserved lane areas, for exam-
ple, could be agreed in advance. Further cooperative
maneuvers may be recommended by the TMS until
the participating CHAVs leave the intersection area.
6 EVALUATION
The evaluation of our cooperation approach builds
upon a comprehensive simulation setup that includes
virtual sensors, controllers for the TMS and all ve-
hicles involved, local situational overviews and inter-
nal states for all automated participants, specialized
subscription and unsubscription procedures, a lim-
ited, prototypical implementation of the proposed ap-
proach as well as an omniscient evaluation framework
with extensive monitoring and logging capabilities.
Despite the large implementation effort, we are
aware that our setup is useful only for demonstration
purposes, but not sufficient to fully answer the second
and third research questions. We therefore plan to en-
hance this setup in follow-up activities and to publish
more differentiated results in further contributions.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
22

6.1 Implementation
To evaluate the cooperation approach simulatively,
the developed concepts were prototypically imple-
mented as a Python wrapper for the simulator Sim-
ulation of Urban Mobility (SUMO, version 1.1.0). As
a widely used and commonly accepted open source
traffic simulation, SUMO offers a large community,
extensive documentation, numerous application ex-
amples, and a plethora of scientific publications.
The simulation setup employs a TCP-based ar-
chitecture and makes use of Traffic Control Interface
(TraCI) to manipulate the behavior of all automated
traffic participants. As a first step, a TMS controller
is instantiated into the model. In each simulation
step, an external simulation routine is triggered first,
which adds new road users to the simulation. Each
newly created vehicle is then equipped with an ex-
ternal CHAV or HV controller that can influence the
participant’s behavior in all subsequent steps.
As a result of the controller initialization, selected
parameters of the SUMO default vehicle models are
overwritten with suitable values to represent the typ-
ical characteristics of CHAVs and HVs described in
Section 4, which are compared in Table 6.
Table 6: Comparison of Vehicle Controller Parameters.
Parameter CHAV-C HV-C
Maximum Speed v
max
50 km/h 60 km/h
Speed Deviation δ
v
0 0.1
Driver Imperfection σ 0.1 0.5
Reaction Time t
r
0.6 s 1 s
As they approach the intersection, all CHAVs sub-
scribe themselves by calling respective methods of the
TMS controller. The TMS senses the traffic situation
at the intersection using virtual sensors and generates
simplified cooperation recommendations for CLCs,
which are then forwarded to the CHAV controllers. In
order to evaluate the strategy combinations indepen-
dently, each vehicle uses both virtual sensors and a
randomly generated cooperative factor f
c
∈ [0, 1] that
models the general willingness to cooperate. Follow-
ing the evaluations, the two payoff matrices are ex-
changed via further method calls and a decision is
made. If the CHAVs decide to execute the maneu-
ver, the driving behavior of the involved vehicles is
manipulated by calling the changeLane(...) and
slowDown(...) TraCI methods. If not, the vehicles
continue their journey without being affected.
6.2 Execution
A simulation model of the research intersection in
Brunswick provided by the Institute of Transporta-
tion Systems of the German Aerospace Center serves
as a basis for the simulation-based evaluation. It com-
prises a true-to-scale representation of the physical in-
tersection as part of the Application Platform for In-
telligent Mobility including an integrated traffic light
sequence and a realistic lane layout. Besides five in-
coming lanes from east, south, and west as well as
three incoming lanes from north, each intersection
arm has two additional outgoing lanes.
The simulation model also includes recorded, real
traffic data with a duration of one hour, in which ar-
rival times and lanes, types, and destinations of all
traffic participants (passenger cars, trucks, cyclists,
and pedestrians) are defined. A previously created,
deterministic mechanism divides passenger cars into
CHAVs and HVs according to a selected distribution.
In preparation for the simulation experiments, we also
instantiated two vehicles with a fixed position and a
constant speed of 0 km/h used as static obstacles to
provoke CLCs in the western and southern approach
in close proximity to the intersection area.
The first component of the evaluation was the ex-
ecution of eleven simulation runs with an increasing
percentage of CHAVs (0, 10, . . . , 100 %) without be-
ing influenced by our cooperation approach. The goal
of these simulations was to create a baseline for as-
sessing the impact of cooperation. The trucks in-
cluded in the traffic data were exclusively used with-
out any automated controller. In addition, the behav-
ior of cyclists and pedestrians remained unchanged.
To increase the variance, ten repetitions of each sim-
ulation run were performed with different allocations
of CHAV and HV controllers. The generated simula-
tion results thus contain ten hours of simulated traf-
fic per run, in each of which approximately 19.200
CHAVs, HVs, and trucks as well as 1.200 cyclists and
1.860 pedestrians pass the intersection area.
As a second evaluation component, eleven addi-
tional simulation runs with the same allocations of
CHAV and HV controllers were carried out, incorpo-
rating the presented cooperation approach. By using
the same simulation environment and the same input
data, the simulation results can be used to assess the
impact of cooperation on traffic efficiency.
6.3 Results
Since the first research question has already been ad-
dressed by the presentation of our cooperation ap-
proach in Section 5, we will focus on our simulation
results to give some first hints on answering the subse-
quent questions. At first, a look into the global obser-
vations shall give an impression on the effects of au-
tomation and cooperation in general. A second rather
Cooperative Maneuvers of Highly Automated Vehicles at Urban Intersections: A Game-theoretic Approach
23
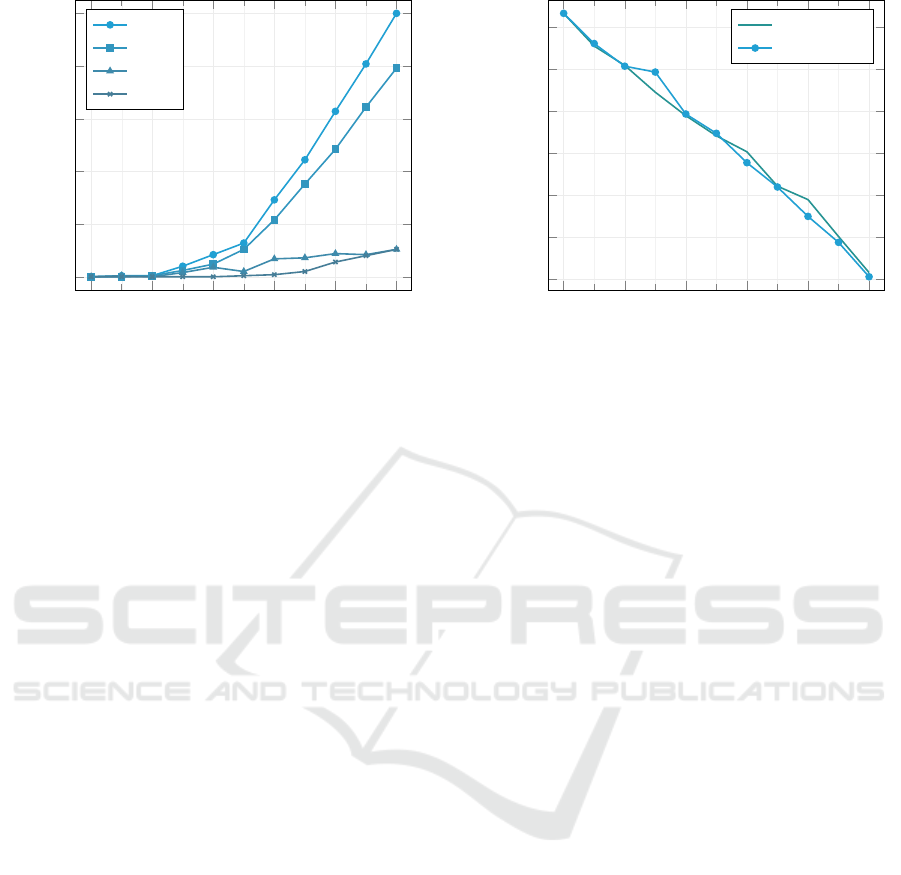
0 20 40
60
80 100
0
100
200
300
400
500
Percentage of CHAVs [%]
Number of Cooperating Vehicles [#]
Total
West
South
North
Figure 6: Numbers of Cooperating Vehicles.
detailed look focuses on individual parts of the inter-
section and investigates the influence of cooperative
maneuvers on individual road users.
The potential options for assessing traffic effi-
ciency are manifold. While municipal administrations
usually consider capacities or maximum congestion
lengths, human drivers or passengers evaluate traffic
efficiency on the basis of crossing durations or the
presence of directly perceptible delays. As the evalu-
ation is based on a fixed simulation environment and
real traffic data, it does not make sense to consider the
junction’s capacity as no vehicle gets stuck. Instead,
the crossing duration will be taken into account, as it
implicitly includes time losses and waiting times.
6.3.1 Global Observations
Starting with Figure 6, it can be observed that the
total number of cooperating vehicles grows with an
increasing percentage of CHAVs from 2 at a rate of
10 % to 500 at a rate of 100 %. A division of the num-
ber of vehicles by two results in the number of coop-
erative maneuvers, since one cooperation always in-
volves two participating CHAVs. As expected, a ma-
jority of cooperative maneuvers can be observed on
the lanes coming from west and south.
By putting this figure in direct relation with Fig-
ure 7, it can be determined that along with an in-
creased percentage of CHAVs – with and without
cooperation – the mean crossing duration decreases,
which can be expected through strict compliance with
legal requirements such as minimum distance and
maximum speed of CHAVs in contrast to HVs. It
is noteworthy that only from a rate above 50 % of
CHAVs cooperative maneuvers bring an additional,
albeit small, improvement in comparison to the base-
line without cooperation. At rates below they can
0 20 40
60
80 100
56.5
57
57.5
58
58.5
59
59.5
Percentage of CHAVs [%]
Mean Crossing Duration [s]
Baseline
Cooperative
Figure 7: Mean Crossing Durations.
even have a negative impact, e.g., at 30 % with a pro-
longation of the mean crossing duration by 0.24 s.
However, when interpreting the results it must be
taken into account that with respect to the small size
of the traffic area under consideration only minor time
differences are to be expected, especially if the per-
centage of CHAVs is low. A further limitation is
the simplified implementation of the TMS controller,
which only generates cooperation recommendations
for a selected set of traffic situations. As already men-
tioned in Section 2, a number of publications exclu-
sively deal with algorithms for possible path planning
that could be applied to improve the quality of the
generated recommendations in future work.
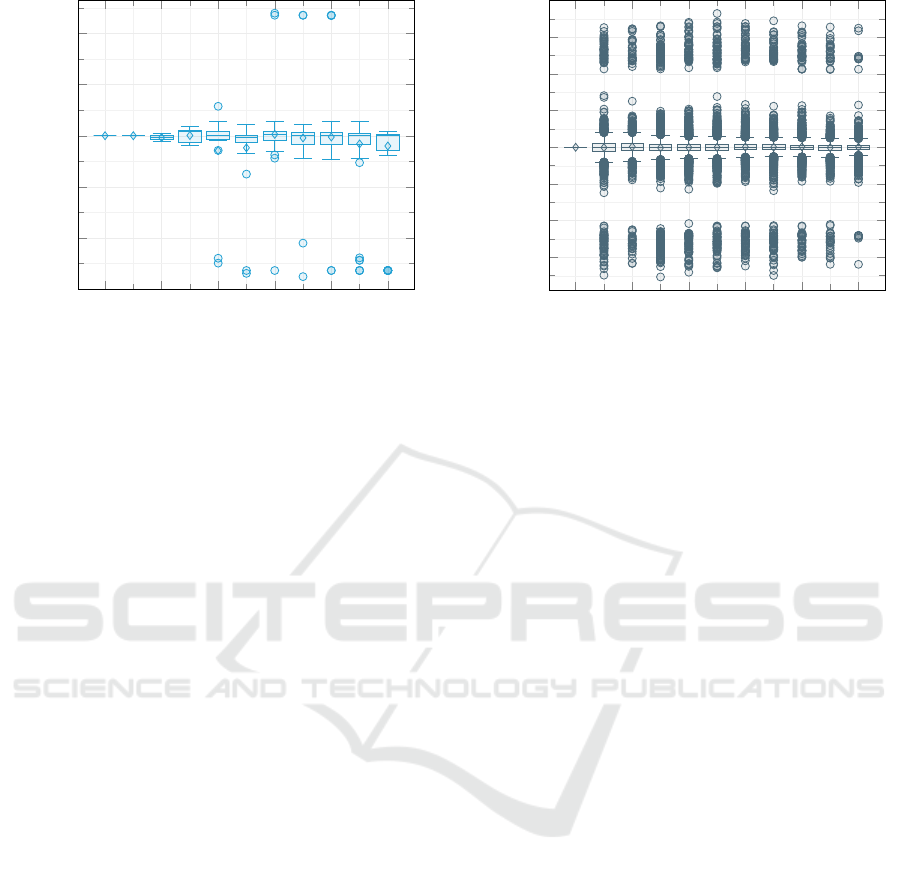
6.3.2 Local Observations
In the following, we focus on the western intersection
approach, where the largest number of cooperative
maneuvers can be observed. Thereby, the influence of
cooperative maneuvers on both cooperating and non-
cooperating vehicles is investigated more deeply.
In Figures 8 and 9, the variation of crossing du-
rations is plotted on the y-axis along with the preva-
lence of CHAV in percentage on the x-axis. A neg-
ative value represents an improvement (faster cross-
ing) whereas a positive value represents a deteriora-
tion (slower crossing). The variation is to be inter-
preted in relation to the crossing time needed without
cooperative maneuvers (baseline at constant 0) and
therefore only those vehicles were considered, which
experienced a change of their crossing duration.
The effects on cooperating vehicles are depicted
in Figure 8. It can be seen that no cooperations were
observed below a prevalence rate of CHAVs of 20 %.
The medians of all subsequent distributions are al-
ways around zero and vary slightly in the first decimal
place. The boxes which represent 50 % of the vehicles
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
24
0 20 40
60
80 100
−50
−25
0
25
50
Percentage of CHAVs [%]
Variation of Crossing Durations [s]
Figure 8: Effects on Cooperating Vehicles (West).
are also around zero. However, with an increasing
percentage of automated vehicles (exception at 60 %)
it can be stated that the vehicles from the upper quar-
tile experience only a small time loss, whereas the ve-
hicles from the lower quartile can achieve a greater
time gain in comparison. The outliers to be observed
are caused by the use of time-controlled traffic lights
and the changed arrival times of the involved CHAVs.
As a red phase lasts up to 50 s, corresponding time
gains and losses can be found. Since there are more
outliers downwards than upwards, the mean values –
represented by diamonds – are below zero above 50 %
of CHAVs with an exception at 60 % with 0.67 s.
Figure 9 shows the effects on non-cooperating ve-
hicles. The medians as well as the mean values and
boxes are around zero, again. With an increasing per-
centage of CHAVs the box sizes decrease slightly,
probably due to a smoother traffic flow. It is notice-
able that the only cooperation that is observed at 10 %
– located in the southern approach – has a clearly vis-
ible effect on the traffic situation in the western inter-
section arm. The reason for this seems to come from
SUMO, which varies some parameters of newly in-
stantiated vehicles depending on the prevailing traffic
situation. The distribution of outliers in terms of time
gains and losses is again influenced by the behavior of
the traffic lights, but can be regarded as balanced, so
that neither a particular advantage nor disadvantage
can be determined on non-cooperating vehicles.
7 CONCLUSION
In this paper, we proposed a decentralized, game-
theoretic approach for the negotiation of coopera-
tive maneuvers of CHAVs at urban intersections. To
support these maneuvers, we assumed the existence
0 20 40
60
80 100
−75
−50
−25
0
25
50
75
Percentage of CHAVs [%]
Variation of Crossing Durations [s]
Figure 9: Effects on Non-Cooperating Vehicles (West).
of an intelligent TMS with a global view on the
whole scenery in order to derive cooperation recom-
mendations without directly controlling the CHAVs.
This combination enables a mutually consistent, dis-
tributed decision making on cooperative driving ma-
neuvers, taking into account global and local goals.
Due to the large implementation effort, the evalua-
tion results are preliminary with regard to a possible
increase in traffic efficiency and the identification of
causal relationships. We therefore plan to enhance
our evaluation, e.g., by investigating the influence of
different traffic densities or controller configurations,
and to report on more elaborated results.
Until now, it can be stated that both cooperat-
ing and non-cooperating vehicles are influenced posi-
tively and negatively in the sense of shorter and longer
crossing durations. A trend shows that the advantages
for cooperating vehicles seem to be much greater than
the disadvantages, although (so far) not for all per-
centages of CHAVs. Positive and negative impacts on
non-cooperating vehicles compensate each other. The
results may vary depending on the geometry and other
characteristics such as the number of the lanes.
Taking into account the fact that the approach only
considers a single intersection without any cascading
effects and that initially only two CHAVs are able to
perform a cooperative maneuver, it was possible to
create a solid basis for further evaluations. The pro-
totypical implementation of required methods for the
generation of cooperation recommendations can cer-
tainly be improved on the basis of existing research.
Also the CHAV controller could be refined, e.g., by
including more realistic virtual sensors or behavioral
predictions. In addition, we plan to extend our ap-
proach in a granted follow-up project to support the
interaction of cooperating vehicle groups in signifi-
cantly larger traffic areas with multiple intersections.
Cooperative Maneuvers of Highly Automated Vehicles at Urban Intersections: A Game-theoretic Approach
25

The associated potential to increase traffic efficiency
still offers plenty of scope for further research.
ACKNOWLEDGMENTS
This work has been funded by the Federal Ministry of
Transport and Digital Infrastructure (BMVI) as part
of Digitaler Knoten 4.0 (reference no. 16AVF1008F)
and ViVre (reference no. 01MM19014E).
We would like to thank all project partners for
their trust and cooperation in discussions on the ini-
tial cooperation concept and the joint development of
the presented reference architecture.
REFERENCES
Burgstrahler, D.-M. (2017). Collaborative Sensing in Auto-
motive Scenarios. PhD thesis, Technische Universit
¨
at
Darmstadt.
de Alfaro, L. and Henzinger, T. A. (2000). Concurrent
Omega-Regular Games. In Proceedings of the 15th
Annual IEEE Symposium on Logic in Computer Sci-
ence, pages 141–154. IEEE Computer Society.
Digitaler Knoten 4.0 (2019). Project Website.
https://verkehrsforschung.dlr.de/de/projekte/
digitaler-knoten-40. Accessed Feb. 20, 2020.
Dresner, K. and Stone, P. (2008). A Multiagent Approach
to Autonomous Intersection Management. Journal of
Artificial Intelligence Research, 31:591–656.
Dresner, K. M. (2009). Autonomous Intersection Manage-
ment. PhD thesis, University of Texas.
Federal Ministry of Transport and Digital Infrastructure
(2016). The 2030 Federal Transport Infrastructure
Plan.
Frese, C. and Beyerer, J. (2010). Planning Cooperative
Motions of Cognitive Automobiles Using Tree Search
Algorithms. In Dillmann, R., Beyerer, J., Hanebeck,
U. D., and Schultz, T., editors, KI 2010: Advances in
Artificial Intelligence, pages 91–98. Springer.
German Aerospace Center (2018). SUMO. Simulation of
Urban MObility. http://sumo.sourceforge.net/. Ac-
cessed Feb. 20, 2020.
Gregiore, J., Bonnabel, S., and de La Fortelle, A. (2012).
Optimal Cooperative Motion Planning for Vehicles at
Intersections. In Proceedings of the IEEE Interna-
tional Workshop on Navigation, Perception, Accurate
Positioning and Mapping for Intelligent Vehicles.
INRIX (2019). Berlin ist Deutschlands Stauhaupt-
stadt. http://inrix.com/press-releases/scorecard-2018-
de/. Accessed Feb. 20, 2020.
Kneissl, M., Molin, A., Esen, H., and Hirche, S. (2018).
A Feasible MPC-Based Negotiation Algorithm for
Automated Intersection Crossing. In Proceedings of
the European Control Conference, pages 1282–1288.
IEEE Computer Society.
Lemmer, K. (2019). Neue autoMobilit
¨
at II. Kooperativer
Straßenverkehr und intelligente Verkehrssteuerung f
¨
ur
die Mobilit
¨
at der Zukunft. utzverlag GmbH.
Liu, B., Shi, Q., Song, Z., and El Kamel, A. (2019). Trajec-
tory Planning for Autonomous Intersection Manage-
ment of Connected Vehicles. Simulation Modelling
Practice and Theory, 90:16–30.
Maschler, M., Solan, E., and Zamir, S. (2013). Game The-
ory. Cambridge University Press.
Nash, J. (1951). Non-Cooperative Games. Annals of Math-
ematics, pages 286–295.
SAE International (2018). Taxonomy and Definitions for
Terms Related to On-Road Motor Vehicle Automated
Driving Systems. SAE Standard J3016 201806.
Sharon, G., Albert, M., Rambha, T., Boyles, S. D., and
Stone, P. (2018). Traffic Optimization for a Mixture
of Self-Interested and Compliant Agents. In Proceed-
ings of the 32nd Conference on Artificial Intelligence,
pages 1202–1209.
Sharon, G. and Stone, P. (2017). A Protocol for Mixed
Autonomous and Human-Operated Vehicles at Inter-
sections. In Proceedings of the 2nd International
Workshop on Agent-based Modeling of Urban Sys-
tems, pages 151–167. Springer.
Spiegel (2019). K
¨
oln muss wegen Luftverschmutzung
Fahrverbote verh
¨
angen. https://www.spiegel.de/
auto/aktuell/koeln-muss-fahrverbote-verhaengen-a-
1286501.html. Accessed Feb. 20, 2020.
Tagesspiegel (2019). Fahrverbote f
¨
ur Diesel in
Berlin und 33 Mal Tempo 30. Diese acht
Streckenabschnitte werden gesperrt. https:
//www.tagesspiegel.de/berlin/fahrverbote-fuer-
diesel-in-berlin-und-33-mal-tempo-30-diese-acht-
streckenabschnitte-werden-gesperrt/24692466.html.
Accessed Feb. 20, 2020.
von Neumann, J. and Morgenstern, O. (1953). Theory of
Games and Economic Behavior. Princeton University
Press.
Winter, S. (2015). Grundz
¨
uge der Spieltheorie: Ein Lehr-
und Arbeitsbuch f
¨
ur das (Selbst-)Studium. Springer
Gabler.
Wu, J., Abbas-Turki, A., and El Moudni, A. (2012). Co-
operative Driving: An Ant Colony System for Au-
tonomous Intersection Management. Applied Intelli-
gence, 37(2):207–222.
Yan, X., Radwan, E., and Guo, D. (2007). Effects of Major-
Road Vehicle Speed and Driver Age and Gender on
Left-Turn Gap Acceptance. Accident Analysis & Pre-
vention, 39(4):843–852.
Zeit (2018). Hamburg bereitet Fahrverbot auf 2,38 Kilo-
metern vor. https://www.zeit.de/mobilitaet/2018-05/
diesel-fahrverbote-hamburg-stickstoffbelastung. Ac-
cessed Feb. 20, 2020.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
26
