
Connected Vehicles Fleet Expanding Problems
Larisa Gabsalikhova
1a
, Irina Makarova
1b
, Vladimir Shepelev
2,3 c
, Larisa Fatikhova
1d
and Eduard Belyaev
1
1
Kazan Federal University, Syuyumbike prosp., 10a, 423822, Naberezhnye Chelny, Russian Federation
2
Silkway International University, Tokaev Street 27 “А”(housing А) Turkestan Street Corner,
160019, Shymkent City, Kazakhstan
3
South Ural State University, ave. V.I. Lenin 76, 454080, Chelyabinsk, Russian Federation
Keywords: Connected Vehicles, Fleet Expanding, Problems.
Abstract: The transport systems intellectualization directions analysed in article. The digital technology introduction
occurs at all stages of the vehicle life cycle: product development, preparation and production launch, product
manufacture, its operation and maintenance. The autonomous vehicles fleet expanding problems are indicated.
The intelligent vehicles development and the varying degrees of intellectualization vehicles fleet expansion
is accompanied by a number of problems, including those related to the influence of social factors on the
transition to fully autonomous vehicles. Consumers are still worried about the consequences of introducing
such vehicles, which is related to the security problems. The risk assessment of connected vehicles
introduction to the market has been performed. The article concludes with an analysis of connected vehicles
ensuring the reliability technical problems.
1 INTRODUCTION
The world economy of the new millennium is
characterized by two trends: the rapid development of
engineering and technology, which require
significant amounts of resources and cause the
emergence of negative impact on the environment
sources significant number, on the one hand, and on
the other, an increase in the number of transition to a
«green» and circular economy supporters the
initiating the development of program documents and
concepts for sustainable development (SD) in all
areas of activity. The processes of globalization and
urbanization are accompanied by an increase in the
need for transportation, which requires solving the
issues of transport system stability and security. One
of the priority areas, the need for development of
which is caused by urbanization negative
consequences, the economy real sector development,
as well as, often, unjustified harmful human impacts
on the environment, indicated in the UNEP «Global
a
https://orcid.org/0000-0003-3325-3285
b
https://orcid.org/0000-0002-6184-9900
c
https://orcid.org/0000-0002-1143-2031
d
https://orcid.org/0000-0003-2442-2374
Green New Deal», sounds like «Sustainable cities,
including planning, transport and green building»
(UNEP, 2020).
The UNEP transport strategy, which promoted a
paradigm shift towards less road use without
compromising mobility, has three areas: «Prevention
- Transition - Ensuring environmental cleanliness».
To solve this problem, various methods are proposed,
the most promising of which is transport systems
intellectualization greater process, which, in
particular, is reflected in road transport development
strategy in Russia AutoNet. Innovations in the field
of transport today are very relevant, since transport
has a key impact on society, especially in terms of
permanent SD. This is reflected in the concept of
smart city. At the same time, smart mobility is one of
the main issues here, as it provides people with access
to places of work and leisure, and is also part of the
production and other subsystems in the city’s
economy.
642
Gabsalikhova, L., Makarova, I., Shepelev, V., Fatikhova, L. and Belyaev, E.
Connected Vehicles Fleet Expanding Problems.
DOI: 10.5220/0009838506420650
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 642-650
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 STATE OF THE PROBLEM:
TRANSPORT SYSTEM
INTELLECTUALIZATION
CONDITIONS AND
PROSPECTS
2.1 The Issues of Transport Systems
Intellectualization: Smart Mobility
Transition from traditional production to the
automation of its processes based on advanced
industrial technologies and digitalization is necessary
to implement Industry 4.0. Industry 4.0 means a
paradigm shift in industrial production towards the
use of flexible structures with autonomous,
automatically controlled elements. At the same time,
enterprise logistics can be optimized using intelligent
cyber-physical systems and autonomous vehicles.
The creation of autonomous vehicles is one of the key
trends in the digital economy, since their introduction
will lead to changes in a number of economy and
urban economy sectors the related to logistics
processes. As a result of digital technologies
introduction, vehicle manufacturers are already
beginning to engage in direct sales, the traditional
business model of the company is being transformed
and services such as an online vehicle sales platform
and a short-term rental service for special vehicles
and vehicles are emerging.
A Deloitte agency review indicates that there are
two opposing perspectives on the future of mobility
(The Future of…, 2019). Their fundamental
differences are mainly related to the question of
whether traditional vehicles private ownership
current model, driven by humans, is relatively
unchanged, sooner or later we will move on to
autonomous vehicles, mainly shared. There are also
fundamentally different points of view regarding
exactly what the path to transformation will be.
Proponents of natural evolution idea believe that the
development of the business ecosystem of the
automotive industry will be consistent and
straightforward, and its current assets and
fundamental structure will essentially remain
unchanged. Opposite point of view adherents -
jerking development - predict the onset of a turning
point that promises very interesting economic
prospects and benefits for society. At the same time,
analysts, in view of the competition between the
market forces that form the new structure of the
automotive industry, identified four different
scenarios for its development, which will appear as
two key factors influence result: the way of driving
(driving with the participation of a person or
autonomous driving), the vehicles ownership form
(private or joint). According to the results of the
analysis, innovations will be unevenly distributed in
different countries of the world, whose population
experiences different needs for different types of
mobility. This means that future transport ecosystem
all four forms are likely to exist simultaneously.
The service that provides Real-time Traffic and
Travel Information (RTTI) promotes real-time
information about the traffic situation and optimal
travel routes to increase the mobility of the
population. This information (increasingly in
conjunction with satellite navigation services) is now
being offered, both public and private sources. In the
longer term, it is expected that principle of interaction
between participants in the movement and
infrastructure elements realized systems, including
systems are being introduced that provide for the
communication and exchange of information
between connected vehicles using V2X technology,
in particular vehicle-to-vehicle (V2V), vehicle-to-
infrastructure (V2I) and infrastructure-to-
infrastructure (I2I). For V2X technology to become a
reality, two areas - automotive and
telecommunications - must expand the coverage of
the 5G signal and ensure reliable reception. If
necessary, the Global Navigation Satellite System
(GNSS) capabilities will be used.
2.2 Autonomous Trucks
The automotive industry plays a crucial role in
ensuring environmental friendliness and
sustainability of the environment, working towards
market launch of energy-efficient and
environmentally friendly vehicles. At the same time,
the transition to autonomous vehicles can be
combined with the transition to vehicles with a
neutral level of carbon emissions. One way to expand
the potential benefits of autonomous vehicles fleet is
to use electric vehicles, which are usually more
energy efficient.
The most promising area for the use of
autonomous vehicles, causing greater confidence
among consumers, are cargo transportation and
utilities. Autonomous vehicles operate in industries
such as farming, inventory management, mining and
construction. Uber, Tesla and Mercedes-Benz are
experimenting with autonomous driving technology
in city buses and semi-trailers.
On the other hand, municipal vehicles and
trucking fleets have regular traffic routes and
consume large amounts of fuel daily, polluting the
Connected Vehicles Fleet Expanding Problems
643

cities air pools. It is advisable to organize the transfer
of their fleets to more environmentally friendly
vehicles. Connected vehicles for urban services are
especially relevant, since intelligent on-board
systems select the optimal engine operating
conditions, which reduces harmful emissions.
So, for garbage trucks that move along a certain
route, the automation of the garbage compactor will
allow the driver to constantly stay near the console
instead of moving between the cab and the rear of the
garbage truck. For an automated garbage truck,
reversing is much easier than under the control of a
human driver. In addition, given that in some areas,
reversing heavy vehicles is prohibited or possibly
under the control of a traffic controller who helps the
driver, an automated truck with a full range of sensors
can eliminate these restrictions while improving
safety. Since the automation of vehicles is inevitable,
it is more likely to use autonomous vehicles in areas
involving complex and unsafe activities for humans.
One such area is the mining industry, for which
Volvo is testing a truck in the mines. The technology
used in autonomous trucks is designed to optimize the
logistics of mine routes. So, during a continuous
operating cycle, due to traffic planning and
maintaining a given speed, congestion disappears,
which reduces the time for loading and unloading.
Currently, drivers during blasting operations are
usually forced to wait for the subsequent ventilation
of mine shafts and only then proceed with loading the
ore, which in the case of autonomous trucks is an
unnecessary measure, i.e. work can begin
immediately. Thus, each truck can be used much
more efficiently based on transport tasks per shift. As
a result, autonomous vehicles become an integral part
of the overall production system of mine operations.
A more uniform transport cycle and average speed
lead to lower fuel consumption and tire wear (Volvo
FMX autonomous…, 2020).
Improving the design of connected vehicles, their
testing and the transition to alternative energy sources
in road transport indicate a growing desire to create
more environmentally friendly and intelligent
vehicles. In this sense, large enclosed construction
sites are optimal for using fully autonomous
transport, which allows us to automate the
transportation process and reduce the ecological
burden on the environment.
2.3 Driver Assistance Systems
Along with the development of fully autonomous
vehicles (TS), vehicle producers are working on
improving driver assistance systems (ADAS), which
use V2x and 5G technologies to communicate with
other road users. According to the researchers, a
decrease in the role of the human factor in the process
of managing large systems will lead to a reduction in
the risk of incidents that cause serious consequences
in large cities and megacities.
J3016 SAE International's Standard Taxonomy
and Definitions for Terms Associated with
Automated Driving Systems for Land Vehicles
provides a classification system that defines six levels
of driving automation from zero to full automation.
These are: driver warning systems, combinations of
driver warning systems, or automated driving
systems (SAE J3016, 2016).
Drivers the world over also wish to be able to
decide for themselves when to let a car drive
autonomously, and when to control it themselves.
More than 63% of respondents in China believe
driverless cars will increase road safety, while the
figure is 34% in the U.S. and Germany (Survey
examines…,2018).
Since the vehicles intellectualization is aimed at
ensuring safety on the roads, there are active safety
features that are exceptions and are highlighted in this
standard, since they operate in critical situations
regardless of the driver’s desire. Due to the
instantaneous nature of the action of active safety
systems, their intervention does not alter or exclude
the role of the driver in the performance of part or all
of the driving functions, and, therefore, are not
subject to automation. However, it should be noted
that the possibility of avoiding an accident, including
the type of active safety systems, can be in vehicles at
any level of driving automation.
The traditional driver assistance technology
allows to recognize some objects, carry out their basic
classification, notify the driver of dangerous
situations and, in some cases, slow down or stop the
vehicle. This level of technology development does
an excellent job of detecting «dead» zones, assisting
in changing lanes and warning about the danger of
collisions.
2.4 On-board Diagnostic Systems
The vehicles intellectualization, aimed at improving
the safety of transport systems, leads to a number of
problems associated with the structural and
technological solutions complexity. Automotive
companies, working in the direction of the
development and implementation of autonomous
vehicles, predict the emergence of problems
associated with their operation period number: both
commercial (transportation) and technical (service).
iMLTrans 2020 - Special Session on Intelligent Mobility, Logistics and Transport
644
New opportunities and limitations that will have to be
encountered when using autonomous vehicles are
discussed in articles (Fagnant D.J. and Kockelman K.,
2015), (Bonnefon J.-F. et.all, 2016), (Bagloee S.A. et
all, 2016). Currently, the conditions for the
widespread distribution of autonomous vehicles have
not yet been created, since safety issues must be
carefully analyzed (Cui J. et. all, 2019). The
development of on-board diagnostic systems leads to
problems related to the reliability of technical and
electronic systems, the organization of their service
support, safety (Hacker P., 2017), (Hamada Y. et. all,
2019), (Wang Q et. all, 2018), data privacy and
difficulties in applying IT tools and software.
Vehicle producers are interested in predicting the
future of autonomous vehicles, the prospects for their
introduction into the markets. Studies (Haboucha C.J.
2017), (Bansal P. and Kockelman K.M., 2017) allow
us to understand individual motives for choosing
when moving to using autonomous vehicles.
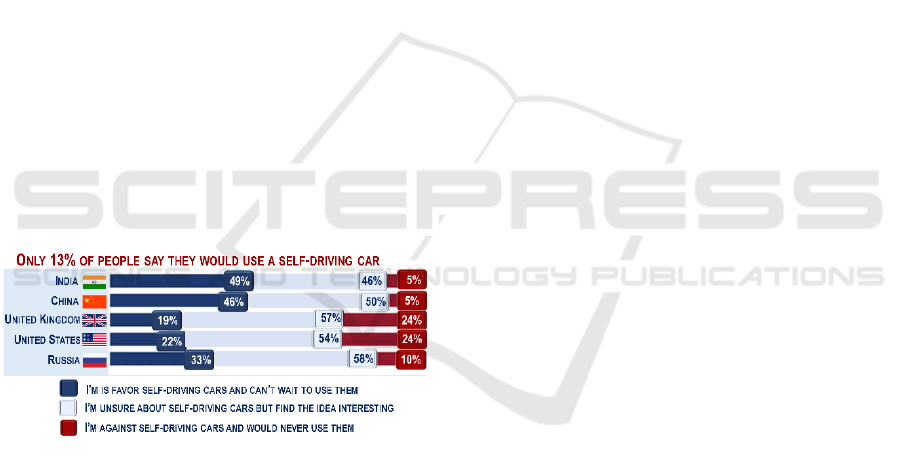
Research 1 shows, that 13% of people say they
would never use a self-driving car. In contrast
however, aversion is twice as high in highly
developed economies (UK and USA) as in lesser-
developed countries. The question of safety reveals a
huge perception gap (Fig.1). Most US drivers feel
unsafe that self-driving cars are even on the road. And
a huge majority is afraid of riding in an autonomous
vehicle (Self-Driving Infographic…, 2019).
Figure 1: Consumer opinion.
Since autonomous vehicles manufacturers must
ensure their trouble-free operation, it is necessary to
solve the issues of organizing their service. For
vehicles technical condition remote assessment, it is
necessary to create a remote database for collecting
failure codes and transmitting them to a service center
for planning the time of arrival for maintenance and
repair and ordering spare parts. At the same time, the
issue of choosing the list and installation locations of
sensors for automotive components, assemblies and
systems timely technical diagnostics that have the
greatest impact on safety is being addressed.
Currently, numerous studies are devoted to the
development of on-board diagnostic systems, for
example, in the article (Fong B. et all, 2015) On-
board diagnostic system based on predictive
information using an intra-vehicle wireless network
with additional functions for monitoring driver status,
on-board sensors for determine the vehicle condition.
For the entire system of autonomous vehicles
operation and service to work in concert, interaction
between various subsystems is necessary: road
infrastructure, service and logistics systems, the
vehicles themselves and other participants in the
movement, as well as the production system. For this,
a unified information environment and intelligent
control systems are created. To a greater extent, the
Smart City concept meets this, where all subsystems
are covered by intelligent controls. For building
confidence in autonomous vehicles requires that
people have confidence in cars in terms of
cybersecurity and reliability.
3 RESULTS AND DISCUSSION
3.1 The Role of Social Factors in the
Transition to Autonomous Vehicles
Assessing possible changes in the transport system
during the transition to autonomous vehicles, analysts
evaluated, first of all, the opportunities that the
economy and society receive:
- Liberation of a person from the routine task of
driving vehicles in routine situations, for example,
during long-term traffic on highways, in traffic jams,
in the urban traffic cycle.
- Reducing accident rate, a significant proportion
of which is associated with the so-called "human
factor". It is believed that the accident rate reduction
can reach 80-90%, since the human factor is the cause
of 80% accidents. Perhaps this is too optimistic a
forecast, since autopilot robots will make their
mistakes typical of robots.
- Growth in vehicle utilization due to fuel
economy, the possibility of round-the-clock
equipment use, etc.
- Savings in creating road infrastructure. Driver
robots, for example, hardly need dividing strips and
barriers, so you can use virtual marking - on cards in
the autopilot memory, etc.
However, in most cases, positive effects have a
downside. Thus, the benefit can lead to losses: the
most obvious is the fact that removing the “human
factor” from the vehicle control system, we create
social tension, reducing the number of people
involved in the drivers transportation. In addition, the
advantage, designated as «the ability to do some
Connected Vehicles Fleet Expanding Problems
645
business during the trip”, according to doctors, can
lead to an increase in ailments due to motion sickness.
To avoid this, technical solutions are needed that can
be expensive (Scott L.V. et all, 2015).
Academic and independent researchers not only
pose numerous complex questions, but also offer
possible solutions to future problems.
As shown by the survey’s results which conducted
in different countries by CISCO (The Network
Cisco's…,2020), a significant population part is not
yet ready to perceive an autonomous vehicle as a full
participant in road traffic. Moreover, the more
developed the country, the smaller the number of
residents willing to entrust him with their lives and
the family lives. This is due to the fact that in these
countries they more adequately assess the
consequences of failures in vehicles control systems.
Fear of cybercrime around autonomous vehicles
is widespread among global motorists—especially in
Germany. A full 76% of respondents in Germany
believe that personal data can fall into unauthorized
hands when using autonomous vehicles (Survey
examines…,2018).
According to the HNTB survey, 91% of
respondents believe that autonomous vehicles should
have someone on board who can take control in an
emergency (Autonomous vehicle…, 2020). People
fear the vehicle inadequate response to unforeseen
situations. Engineers developing autonomous
vehicles must solve the problem of matching
algorithms that implement the autonomous vehicles
actions program with the moral principles if decisions
are needed in emergency situations.
Autonomous vehicles on public transport are
becoming a promising technology in comparison with
existing vehicles. The article (Bosch P.M. et all,
2018) estimates the costs of using autonomous
vehicles, as well as their impact on future
transportation systems. For one thing, the use of
autonomous vehicles increases the purchase price of
a vehicle, but on the other hand, it reduces operating
costs by lowering insurance premiums, maintenance
and fuel costs. In addition, they allow taxi companies
to work without drivers, thereby reducing the bulk of
their costs. However, given the lack of a driver,
customers of such services may exhibit more
irresponsible behavior in the vehicle, which leads to
faster pollution. At the same time, more frequent
cleaning of the cabin and its control are necessary. It
has been established that more than half of
autonomous fleet operating costs will be the
maintenance and management cost (Bosch P.M. et
all, 2018).
The introduction of connected vehicles could
introduce the practice of using joint rides (“ride
sharing”). Sharing connected vehicles will reduce the
need for parking spaces. Given the introduction of
automated vehicles, sharing services can play an
important role in increasing vehicle occupancy and
shortening the distance traveled. The results of the
study (Lavieri P.S. et all, 2019) show that users are
less sensitive to the presence of strangers on a trip to
work compared to a trip in their free time. It is noted
that travel time added to the trip to serve other
passengers can be a more serious obstacle to using
shared services compared to the presence of a
stranger. The study (Kong P. et all, 2018) indicates
that the absence of a person in autonomous vehicles
can be solved with the help of a work robot, however,
there are many users in public transport, which
creates its own difficulties.
Considering the above, it can be concluded that
despite the fact that billions are invested in creating
an autonomous, connected and environmentally
friendly vehicle of the future, consumers are still
afraid of introducing these vehicles consequences.
3.2 Possible Risks of Expanding the
Market for Connected Vehicles
The vehicles intellectualization, achievements in the
autonomous vehicles development lead to a wide
range of operational and service risks. It is necessary
to assess the risks of bringing connected vehicles to
the market. The risk management process usually
consists of the stages (Łukasik Z. and Szymanek, A.,
2012), (Tuncel G., 2010) of identifying risks,
assessing them, choosing a method of mitigation and
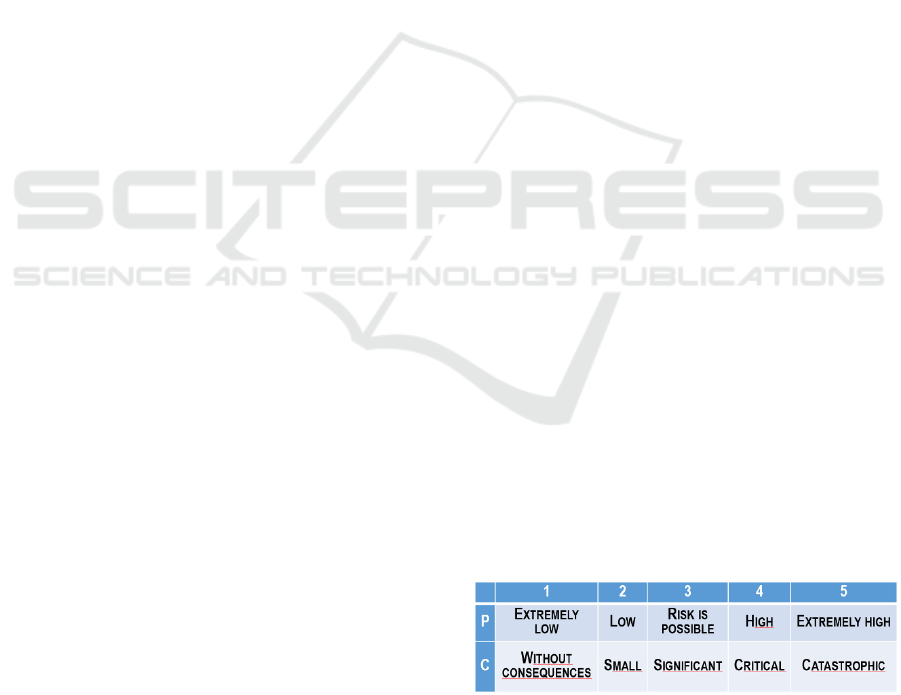
monitoring and control. Table 1 summarizes the
potential risks of expanding the market for connected
vehicles. A method for assessing the risk (P) each
type occurrence and the risk (consequences C)
consequences probability is evaluated on a 5-point
scale (table 1).
Table 1: Probability and risk assessment scale.
The risk level (risk level RL) is defined as the
product of its probability and the consequences (RL
= P × C).
iMLTrans 2020 - Special Session on Intelligent Mobility, Logistics and Transport
646
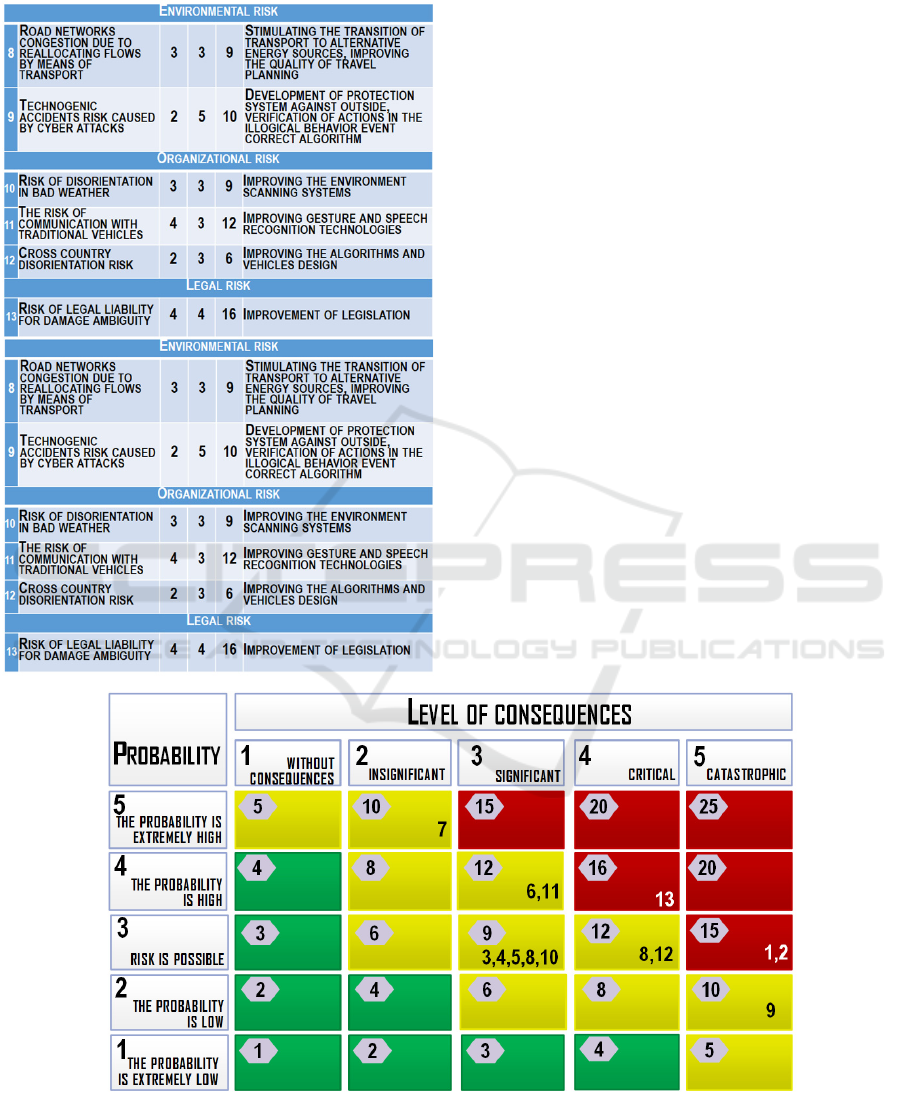
Table 2: Assessment of connected vehicles market
expanding potential risks.
Since the intelligent module should have a large
base for identifying situations and choosing actions,
the most voluminous step before launching such
vehicles on public roads will be machine learning and
algorithm testing.
The main work at the machine learning stage is
the collection and purification of data on which the
model will learn. If the machine is not sufficiently
trained to perceive, for example, persons with
different skin colors, glasses and without them, with
wide or narrow, brown or gray eyes, this can lead to
malfunctions. This will be the risk of erroneous
algorithms. The machine has a lot of human-defined
options for action in order to cope with the problems
that arise, so there is a risk of learning models from
data sets that already contain errors. It is necessary to
analyze the accumulated statistical information and
improve the algorithms.
Connected vehicles vulnerability risk is that there
is a great possibility of hacking software and gaining
access to driving a vehicle. It is necessary to check
the model adequacy with the illogical behavior of the
vehicle. The steering system can be checked for the
adequacy of the action by tracking information about
the deviation from route. The brake system can be
checked for an adequate response to traffic signs,
compliance with traffic rules. There is also the
possibility of an incorrect response to traffic signs in
case of poor visibility.
.
Figure 2: Risk matrix.
Connected Vehicles Fleet Expanding Problems
647
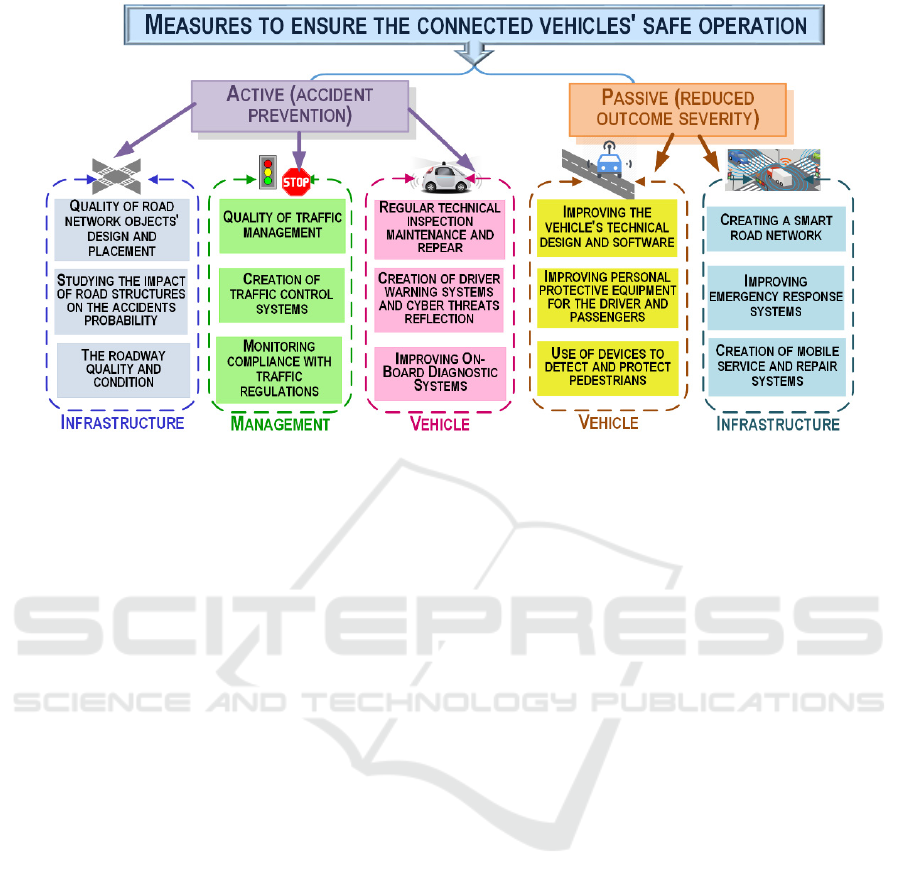
Figure 3: Operational factors affecting the technical condition of connected vehicles.
Introducing connected vehicles consequences will
affect the scope of the service infrastructure related to
their functioning. There is a reorganizing the service
infrastructure high cost risk, including the road, since,
first of all, good road surface and clear markings are
necessary. The cost is also affected by the need to
organize additional sites for vehicle electronic
systems diagnosis and maintenance. In this case,
retraining of personnel is required to service vehicles.
The risk matrix highlighting the critical area is
shown in Figure 2. The risk matrix analysis shows
that the most probable risks, which have serious
consequences both for the person and for the transport
system as a whole, are associated with the risk of
erroneous algorithms, vehicles vulnerability and legal
liability for damage in a traffic accident ambiguity
risk
3.3 Connected Vehicles Reliability
With an increase in the number of connected vehicles,
questions of ensuring their reliability will come out.
One of the most important and necessary conditions
for ensuring the competitiveness of automotive
companies in the world market is the improvement of
the corporate service system. Dealerships should
provide the ability to collect information about the
technical condition of connected vehicles, study
failure statistics for new vehicle models in order to
predict the likelihood of their occurrence.
On-board systems of connected vehicles on each
vehicle will signal the need for maintenance and more
complex problems, while continuous monitoring of
the technical condition is required, which requires the
improvement of on-board diagnostic systems.
Monitoring the technical condition will prevent
premature failures, as well as adjust the modes of
vehicle maintenance.
The article (Makarova I. et all, 2018) analyzes
ways to increase the operational reliability of trucks
by monitoring and diagnosing their technical
condition. The possibility of applying the vibration
diagnostics method to assess the technical condition
and forecasting the remaining service life of the
vehicle’s clutch is analyzed.
Modern vehicles are equipped with a large
number of sensors, and it is obvious that the higher
the degree of intelligence, the more sensors it is
provided, which affects the reliability of the system.
The article (Nitsche C. et all, 2004) proposes an
approach that uses artificial neural networks to
facilitate the task of on-board diagnostics.
To evaluate the structural and technological
reliability of vehicles, calculations and experiments,
including computer ones, are performed, however, it
is impossible to reproduce all variants of external
factors combinations that may arise in actual use.
With this in mind, the task of ensuring reliability in
real operating conditions should be solved taking into
account external influences exerted on the vehicle. In
this case, it is necessary to take into account
operational factors affecting the technical condition
of the connected vehicles. For the connected vehicles’
safe operation, the measures on active and passive
iMLTrans 2020 - Special Session on Intelligent Mobility, Logistics and Transport
648

safety are taken. This applies both to the most
connected vehicle and control system, as well as to
the infrastructure. (Fig. 3.).
Various combinations of these factors create
many emergency situations, nevertheless, it is
necessary to single out the main ones and, taking the
others as independent factors, determine the patterns
and degree of influence on the design of the vehicle.
As vehicles get smarter, technology and
infrastructure must evolve in tandem. Automation
will increasingly contribute to the rapid reporting of
possible vehicle breakdowns, with the ability to
reserve a place in the vehicle service for servicing and
repairing the vehicle, however, the process of
servicing autonomous vehicles will still require
human involvement in vehicle maintenance.
4 CONCLUSIONS
The transport sector is currently undergoing
significant changes. Connected vehicles are actively
entering our lives. The future of connected vehicles
largely depends on building consumer confidence in
the vehicle. But even though billions are being
invested in creating an autonomous, connected and
environmentally friendly vehicle of the future,
consumers still fear the consequences of introducing
these vehicles.
Transport systems intellectualization and
automation involves a large number of diverse risks.
Based on risk assessment the most likely risks that
have serious consequences for both the person and the
transport system as a whole are associated with the
risk of erroneous algorithms (risk level 15), vehicles
vulnerability (risk level 15), and liability for legal
damage ambiguity risk (risk level 16). Ideally, the
vehicle should predict the actions of the objects
surrounding it and, in accordance with this, adjust its
behavior on the road, while solving the task. If the
vehicle is not adequately trained, this will lead to
erroneous actions and endanger road users. There are
still many problems to solve in this direction.
ACKNOWLEDGEMENTS
This work was supported by the Russian Foundation
for Basic Research: grant No. 19-29-06008 \ 19.
REFERENCES
Autonomous vehicle knowledge is key to acceptance: HNTB
Survey, 2020 URL: https://www.hntb.com/
press_release/autonomous-vehicle-knowledge-is-key-
to-acceptance-hntb-su [electronic resource] (accessed
January 20, 2020).
Bagloee, S.A., Tavana, M., Asadi, M., Oliver, T. ,2016.
Autonomous vehicles: challenges, opportunities, and
future implications for transportation policies. Journal
of Modern Transportation, volume 24, Issue 4, 1 p.p.
284-303.
Bansal, P., Kockelman, K.M., 2017 Forecasting Americans’
long-term adoption of connected and autonomous
vehicle technologies. Transportation Research Part A:
Policy and Practice, volume 95, p.p. 49-63.
Bonnefon, J.-F., Shariff, A., Rahwan, I., 2016. The social
dilemma of autonomous vehicles. Science, volume 352,
Issue 6293, p.p. 1573-1576.
Bosch, P. M, Becker, F., Becker, H., Axhausen, K. W., 2018.
Cost-based analysis of autonomous mobility services.
Transport Policy, volume 64, p.p. 76–91.
Cui, J., Sabaliauskaite, G., Liew, L.S., Zhou, F., Zhang, B.,
2019. Collaborative Analysis Framework of Safety and
Security for Autonomous Vehicles. IEEE Access,
volume: 7, p.p. 148672-148683.
Fagnant, D.J., Kockelman, K., 2015 Preparing a nation for
autonomous vehicles: Opportunities, barriers and policy
recommendations. Transportation Research Part A:
Policy and Practice, volume 77, p.p. 167-181.
Fong, B., Situ, L., Poon, L. C. K., Liu, J.., Mo, R. T., Tsang,
K. F., 2015. A prognostics framework for reliability
optimization of mass-produced vehicle onboard
diagnostics system. IEEE 4th Global Conference on
Consumer Electronics (GCCE). DOI:
10.1109/GCCE.2015.7398515. pp. 408-409.
Haboucha, C.J., Ishaq, R., Shiftan, Y., 2017. User
preferences regarding autonomous vehicles. Trans-
portation Research Part C: Emerging Technologies,
volume 78, p.p. 37-49.
Hacker, P., 2017. Personal data, exploitative contracts, and
algorithmic fairness: autonomous vehicles meet the
internet of things. International Data Privacy Law,
volume 7, Issue 4, p.p. 266–286, URL: https://doi.org/
10.1093/idpl/ipx014.
Hamada, Y., Inoue, M., Adachi, N., Ueda, H., Miyashita, Y.,
Hata,Y., 2019 Intrusion detection system for in-vehicle
networks. SEI Technical Review, Issue 88, p.p. 76-81.
Kong, P., Cornet, H., Frenkler, F. 2018. Personas and
Emotional Design for Public Service Robots: A Case
Study with Autonomous Vehicles in Public
Transportation. 2018 International Conference on
Cyberworlds (CW), IEEE, pp. 284-287. DOI:
10.1109/CW.2018.00058.
Lavieri, P. S., Bhat, C.R., 2019. Modeling individuals’
willingness to share trips with strangers in an
autonomous vehicle future. Transportation Research
Part A: Policy and Practice, volume 124, p.p. 242-261.
Connected Vehicles Fleet Expanding Problems
649

Łukasik, Z., Szymanek, A., 2012. Safety And Risk In Road
Traffic: Selected Problems. Transport Problems,
volume 7, Issue 2, pp.83-94.
Makarova, I., Mukhametdinov, E., Mavrin, V., Shubenkova,
K., Garipov, R., 2018. Improvement of the Vehicle's
Onboard Diagnostic System by Using the Vibro-
Diagnostics Method. International Conference on
Diagnostics in Electrical Engineering (Diagnostika).
Conference Paper. Publisher: IEEE. DOI:
10.1109/DIAGNOSTIKA.2018.8526093.
Nitsche, C., Schroedl, S., Weiss, W., 2004 Onboard
diagnostics concept for fuel cell vehicles using adaptive
modelling. IEEE Intelligent Vehicles Symposium, p.p.
127-132.
Standard SAE J3016, 2014. SAE Intrnational. URL: https://
www.sae.org/binaries/content/assets/cm/content/news/
press-releases/pathway-to-autonomy/
automated_driving.pdf [electronic resource] (accessed
January 20, 2020).
Self-Driving Infographic – All About Self-Driving
Cars.2019. Artchester.net. URL: https://artchester.net/
2019/01/self-driving-infographic/ [electronic resource]
(accessed January 30, 2019).
Scott, L. V, Zolfaghari, A., Polak, J., 2015. Autonomous
cars: The tension between occupant experience and
intersection capacity. Transportation Research Part C,
volume 52, p.p..1–14.
Survey examines global consumer perceptions of
autonomous vehicle safety. 2018. Autonomus vehicle
technology. URL:
https://www.autonomousvehicletech.com/articles/
673-survey-examines-global-consumer-perceptions-of-
autonomous-vehicle-safety [electronic resource]
(accessed January 20, 2020).
The Future of Mobility. A New Deal for Mobility in
Belgium. 2019. Deloitte Belgium. URL: https://
www2.deloitte.com/be/en/pages/strategy-operations/
articles/future-of-mobility.html [electronic resource]
(accessed January 20, 2020).
The Network Cisco's Technology News Site.2020. Cisco.
URL: https://newsroom.cisco.com/press-release-
content?type=webcontent&articleId=1184392
[electronic resource] (accessed January 20, 2020).
Volvo FMX autonomous truck tested in boliden mines in
Sweden. 2020. Service trance. URL: http://str-
volvo.ru/node/101 [electronic resource] (accessed
January 20, 2020).
Tuncel, G., 2010 How can risks be managed in logistics
networks. Dangerous Materials: Control, Risk
Prevention and Crisis Management, p.p. 93-100.
UNEP, 2020. Unepcom URL: http:// www.unepcom.ru/
unep/gei.html [electronic resource] (accessed January
20, 2020).
Wang, Q., Qian, Y., Lu, Z., Shoukry, Y., Qu, G., 2018. A
delay based plug-in-monitor for Intrusion Detection in
Controller Area Network. Proceedings of the 2018
Asian Hardware Oriented Security and Trust
Symposium, Asian HOST 20189, No 8607178, p.p. 86-
91.
iMLTrans 2020 - Special Session on Intelligent Mobility, Logistics and Transport
650
