
Multi-view Real-time 3D Occupancy Map for Machine-patient Collision
Avoidance
Timothy Callemein, Kristof Van Beeck and Toon Goedem
´
e
EAVISE, PSI, KU Leuven, Jan Pieter de Nayerlaan 5, Sint-Katelijne-Waver, Belgium
Keywords:
Cobots, Real-time, 3D Occupancy, Multi-view.
Abstract:
Nowadays - due to advancements in technology - cooperative robots (or cobots) find their way outside the more
traditional industrial context. They are used for example in medical scenarios during operations or scanning of
patients. Evidently, these scenarios require sufficient safety measures. In this work, we focus on the scenario
of an X-ray scanner room, equipped with several cobots (mobile scanner, adjustable tabletop and wall stand)
where both patients and medical staff members can walk around freely. We propose an approach to calculate a
3D safeguard zone around people that can be used to restrict the movement of the cobots to prevent collisions.
For this, we rely on four ceiling-mounted cameras. The goal of this work is to develop an accurate system
with minimal latency at limited hardware costs. To calculate the 3D safeguard zone we propose to use CNN
people detection or segmentation techniques to provide the silhouette input needed to calculate a 3D visual
hull. We evaluate several state-of-the-art techniques in the search of the optimal trade-off between speed and
accuracy. Our research shows that it is possible to achieve acceptable performance processing four cameras
with a latency of 125ms with a precision of 54% at a recall of 75%, using the YOLACT++ model.
1 INTRODUCTION
In industrial processes, steady growth in robotics has
led to faster and more precise manufacturing, decreas-
ing the requirement of heavy human labour. These in-
dustrial robots often execute a preprogrammed repet-
itive task. However, more recently such robots are
also employed outside of an industrial context, and
- instead of a fixed preprogrammed task - they work
together with a human operator in a cooperative man-
ner. Hence, they are often referred to as cobots (Ed-
ward et al., 1999; Peshkin and Colgate, 1999; Vil-
lani et al., 2018). Even though these cobots are su-
pervised and controlled by a human, important safety
precautions must be taken into account to e.g. avoid
collisions. In this work, we propose a vision-based
safety system, which automatically calculates a safe-
guard zone around people in real-time. This safeguard
zone can be used as an off-limits zone for the cobots,
restricting their movements so they are unable to col-
lide with a person present inside the robot’s move-
ment space. Our system is able to calculate this real-
time person 3D safeguard zone using several multiple
viewpoint cameras as input. Our method uses visual
data, which nowadays is cheap, easily expandable in
numbers, and capable of being processed both cen-
tralised and decentralised.
Figure 1: Use case example: Scanner room equipped with
the mobile scanner, a bucky and scanning table.
To develop our system, we focus on a specific real-
life clinical scenario: an X-ray scanner room with
several cobots installed in it. In this scanner room,
both patients and medical staff members are able to
walk around freely. By calculating an off-limits zone
automatically, we can prevent the robot from collid-
ing with all people present, ensuring their safety.
An example of a scanner room, with all the pre-
viously described equipment installed is illustrated in
figure 1.
Current safety measures only consist of a dead
man’s switch, operated by the medical staff. When-
ever a collision is imminent, the switch is released
freezing all motor functions in the room. This
Callemein, T., Van Beeck, K. and Goedemé, T.
Multi-view Real-time 3D Occupancy Map for Machine-patient Collision Avoidance.
DOI: 10.5220/0010151906270636
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
627-636
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
627

method, however, heavily relies on the presence and
awareness of the staff member. Our goal, therefore,
is to automatically calculate a 3D safeguard area that
can be used as an off-limits zone for the cobots, re-
sulting in a much safer environment.
Such a safeguard, however, should meet stringent
criteria to be usable in practice. Evidently, a high
accuracy should be achieved at a low-latency per-
formance. Due to the safety aspect, a higher recall
should be prioritised over a high precision: it is better
to unnecessarily stop the robot, than to stop the robot
too late or not at all. Furthermore, the room lighting
conditions can vary greatly, especially when the room
has windows.
In a nutshell, our approach calculates an occu-
pancy map containing the voxels of all people present
in the room, to be used as a reference of positions that
are inaccessible for any robotic component. For this,
we rely on multiple cameras installed in the scanner
room at strategical locations (e.g. four cameras placed
at each ceiling corner of the room). The cameras are
positioned in such a manner to have a visual overlap
of the safeguarded area, allowing us to calculate 3D
positions from multiple 2D detections. To generate
the 2D detections, we compared a number of state-of-
the-art object detectors, including both bounding box
and instance segmentation.
Note that our approach is easily generalisable to
other cobot applications. In this work, we employ the
X-ray scanner room as a challenging, real-life appli-
cation. Furthermore, the detector in our approach can
easily be extended to other objects than people.
To summarize, our main contributions are:
• We developed a flexible and fast multi-view
vision-based system capable of calculating a 3D
safeguard zone for person-cobot collision avoid-
ance.
• We compared both bounding box producing de-
tectors and instance segmentation techniques as
input for a visual hull calculation.
• We performed extensive experiments to determine
the optimal speed and accuracy trade-off, using
different state-of-the-art people detectors.
We tested the proposed approach in a real-live
lab setting, and for evaluation we used a public
dataset CMU (Joo et al., 2015), containing point
cloud ground truth of various scenarios taken from
many calibrated camera perspectives.
The remainder of this paper is structured as fol-
lows. Section 2 discusses various techniques pro-
posed in literature to calculate a 3D representation
of objects. Section 3 follows, describing our test
dataset, and specifying which sequences were used
during evaluation, alongside a description of the pre-
processing techniques we developed. Our proposed
approach is detailed in section 4, followed by section
5 discussing our results on the test datasets. We end
with a conclusion and future work in section 6.
2 RELATED WORK
One of the primary concerns involving cobots, is the
safety of the operator (Vicentini, 2020; Villani et al.,
2018). When working nearby robotic parts, an emer-
gency button must be available at all times. However,
during a manufacturing process when something goes
wrong, it might take some time before the operator
can use the emergency button. Automatically trigger-
ing an emergency stop reduces this delay, increasing
the safety of the operator. Several sensing techniques
exist today, e.g. a torque sensor that measures move-
ment resistance might trigger an error when too much
force is required (Phan et al., 2018). However, these
sensors only act when a collision has occurred which
is not ideal and might scare the patient. Other tech-
niques use capacitive or laser tactile proximity sen-
sors (Navarro et al., 2013; Safeea and Neto, 2019),
stopping an imminent collision between the operator
and the robot only nearly before it happens. In our use
case, the patients and medical staff are untrained and
therefore unaware of how close the robot comes be-
fore stopping. Furthermore, only stopping when near
something might still result in a crash depending on
the configured proximity distance of the sensors.
Instead of mounted sensors on each mobile
robotic component, Mohammed et al. (Mohammed
et al., 2017) installed two depth cameras nearby the
cobot and operator. By using two kinect sensors they
calculate a 3D occupancy grid, enabling a safeguard
zone of the people present. However, they rely on
prior background data to filter out the 3D noise and
known robot position to filter out the person points.
In our case, this technique is not possible since peo-
ple walk around in the room in addition to having no
static background to filter out 3D noise. Furthermore,
Mohammed et al. (Mohammed et al., 2017) currently
only uses two depth sensors placed nearby the oper-
ator and the small robotic arm offering little chances
of occlusions by other objects or people. Whereas
our application, a large-sized scanner room equipped
with large mobile equipment, has a higher chance
of occlusions on certain cameras. To overcome this,
more than two cameras can be installed capturing an
overview from multiple viewpoints which might be
combined to partially overcome camera occlusions.
However, increasing the number of depth cameras
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
628

like the kinect comes with an increase in complexity
and increase of the required computational power and
hardware cost. Instead, we chose cheaper RGB sen-
sors allowing an upscale with a feasible price, which
will result in a less complex setup because the possi-
bility of hardware sync triggering.
Most research requiring the 3D positions of peo-
ple, often use a 3D skeleton-based representation.
Whereas some techniques aim to calculate 3D pose
keypoints (Sarafianos et al., 2016; Nie et al., 2017)
from a single camera image, others use multi-view
(Slembrouck et al., 2020) combining 2D pose key-
points together. The current state-of-the-art in both
single view and multi-view 3D pose estimation tech-
niques achieve real-time speed results with accept-
able accuracies for their use cases (Slembrouck et al.,
2020; Sarafianos et al., 2016; Nie et al., 2017). How-
ever, these techniques only output pose keypoints,
whereas for our application we require a 3D bound-
ing volume. Furthermore, both state-of-the-art tech-
niques still have a joint position error of around 5cm,
which for our application is not feasible.
Techniques like (Shi et al., 2020; Yoo et al., 2020)
(evaluated using (Geiger et al., 2012)) show good per-
formance when trying to directly estimate a car and
pedestrian 3D bounding box. The best performing
technique (Shi et al., 2020) uses a 3D RCNN with
available LIDAR point clouds to calculate the 3D
bounding boxes around objects. Although this ad-
ditional sensory data is easily acquired from a vehi-
cle perspective, in our case where we capture from
a top-down perspective, occlusions might reduce the
performance greatly. Furthermore, we require a more
tight 3D enclosure around the person, whereas a 3D
bounding box might be overestimating the person, re-
stricting the movement of the cobots.
A classic method called visual hull (Laurentini,
1994) is capable of acquiring a 3D voxel grid of an
object, using the silhouette of the object taken from
multiple perspectives. (Abdelhak and Chaouki, 2016;
Matusik et al., 2000; Vlasic et al., 2008; Furukawa
and Ponce, 2006; Esteban and Schmitt, 2004). These
techniques, however, often rely on a fast background
subtractor whilst controlling the environment back-
ground and lighting to improve the quality of the ac-
quired foreground, i.e. the silhouette. The mobile na-
ture of the cobots might cause them to be mistaken
for people by the background subtractor. To over-
come the aforementioned challenges, we propose to
use object detection techniques as input for such a vi-
sual hull approach, ensuring that our system works
under various lighting changes and that the resulting
safeguard zone only includes people.
Object detectors in most cases output a bound-
ing box around the object, which for many use-cases
is enough. Multi-stage object detectors (e.g. (Ren
et al., 2015)) achieve very high accuracy by first cal-
culating box proposals, and then performing box clas-
sification. However, the use of multiple stages in-
creases computational complexity, rendering it diffi-
cult to achieve real-time performance. Single-stage
approaches (Liu et al., 2016; Lin et al., 2017; Redmon
and Farhadi, 2018) outperform the multi-stage tech-
niques in terms of speed, with only a minor decrease
in accuracy. Increasing the speed performance even
further with only minor decreases of the accuracy is
often achieved by changing the neural network back-
bone calculating the image features. For example, the
recently proposed MobileNetv3+SSD (Howard et al.,
2019), has a MobileNetV3 backbone optimised for
embedded platforms which minimises the number of
parameters and therefore the required computational
cost.
The bounding boxes produced by these object de-
tection approaches from multiple viewpoint cameras
already allow to calculate a coarse visual hull. How-
ever, exact segmentation of the persons in the image
evidently increases the overall accuracy of the system,
since bounding boxes often tend to give an overesti-
mation of the 3D space. Techniques like (He et al.,
2017; Cai and Vasconcelos, 2019) add an additional
stage after the multi-stage bounding box object detec-
tors to generate an instance mask. However, adding
an additional stage will decrease the network speed
even further. A recent technique called YOLACT++
(Bolya et al., 2019b; Bolya et al., 2019a) aims at sin-
gle shot instance segmentation by simultaneously de-
tecting the bounding box and proposing mask proto-
types of each object in parallel. This ensures real-time
performance at the cost of only a small drop in accu-
racy.
In this work, we will search for the optimal
trade-off between speed and accuracy by compar-
ing both the calculated 3D safeguard zones us-
ing the bounding box detections from the Mo-
bileNetv3+SSD (Howard et al., 2019) method (in its
large and small versions) against the instance seg-
mentations from YOLACT++ (Bolya et al., 2019a).
We compare the results also to more classical back-
ground subtraction techniques.
3 DATASET
To evaluate our system we require a public dataset
with people in various poses in additions to occlu-
sions, all taken from multiple calibrated top-down
camera perspectives. In our use case, we mainly fo-
Multi-view Real-time 3D Occupancy Map for Machine-patient Collision Avoidance
629
z
x
[0;0]
00_01
00_19
00_04
00_07
00_02
00_28
00_13
00_17
00_10
00_06
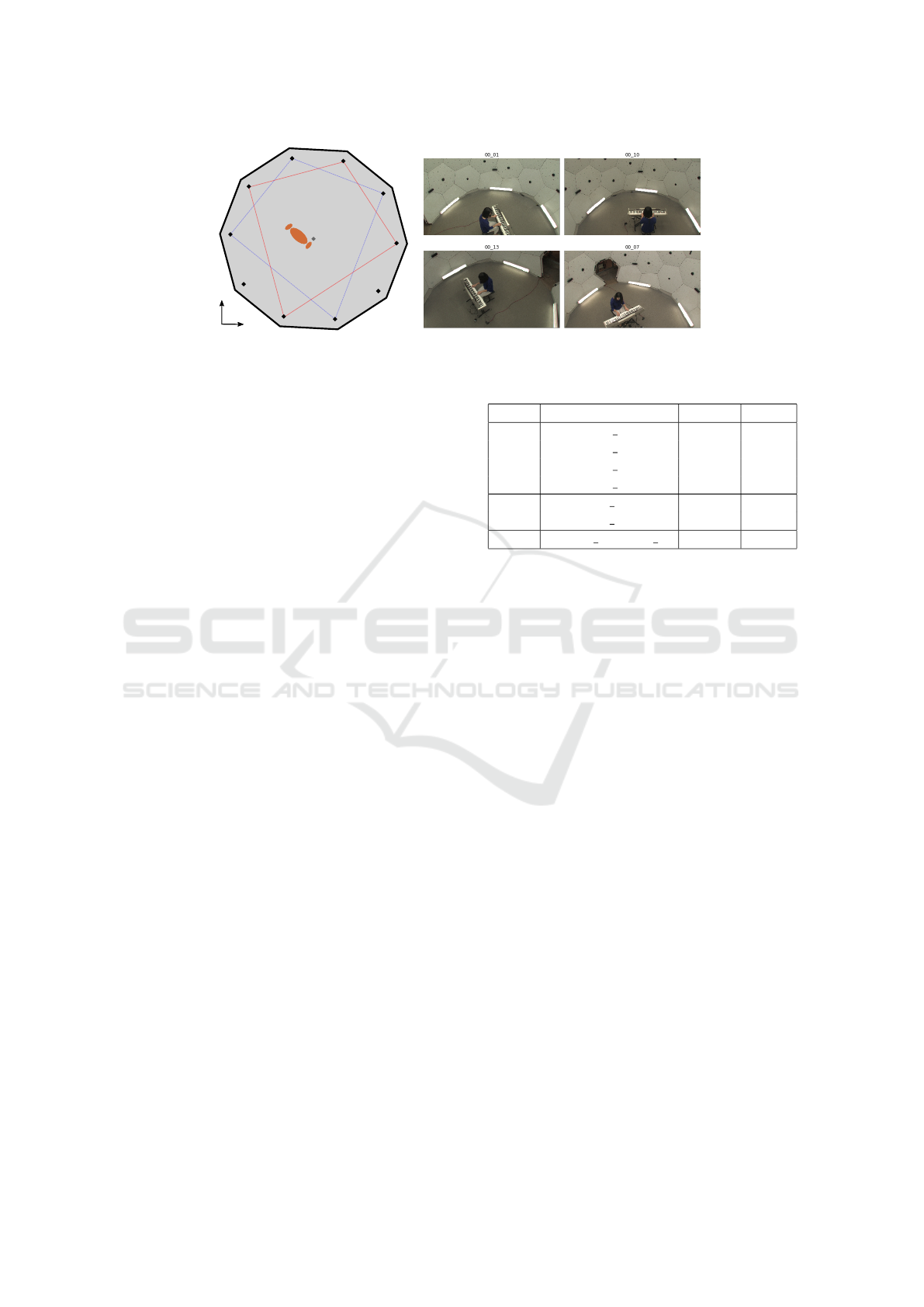
Figure 2: (left) Top-down scheme of the Panoptic dataset, showing the used cameras and two camera sets, (blue and red).
(right) Example frames from the piano sequence taken from the blue camera set.
cus on the 3D position of a single patient, walking
around the scanner room to take place on or in front
of the table or bucky. In this room, multiple top-down
wide-angle image sensors must be installed, captur-
ing the area accessible by the patient. In addition to
sensory data, person point cloud ground truth is re-
quired to measure the accuracy of our calculated pa-
tient occupancy map. We found two publicly avail-
able dataset resembling our use case best, the Panop-
tic Studio (Joo et al., 2015; Joo et al., 2017) and
Multi-View Operation Room (MVOR) dataset (Sri-
vastav et al., 2018). While the MVOR dataset fea-
tures an operation room with similar equipment as our
scanner room, too many people are present, with only
a limited amount of 3D poses and movement varia-
tions. Furthermore, the dataset has only images taken
from three cameras, with no person point cloud data.
The Panoptic dataset, however, contains many differ-
ent scenarios and pose variations of both single and
multiple people, taken from different viewpoints. Al-
though 3D point clouds acquired by the kinects are
available, they are automatically generated and in-
clude noise and other objects apart from people. Be-
low, we describe which sequences we used, followed
by our pre-processing techniques to filter out only the
person point clouds.
3.1 Sequences
The Panoptic dataset contains many different situa-
tions and sequences. As mentioned before, our ap-
plication mainly focuses on avoiding collision with
a single patient. To test various situations, we com-
posed three subsets composed using sequences taken
from the Panoptic studio dataset. Each of them will
test a different scenario and will for the remainder
of this paper be referred to as, the single, piano, and
multi set. Table1 shows which sequences were aggre-
gated from the Panoptic dataset.
The “single” set contains four sequences, each
containing a single person moving around with vari-
Table 1: Used sequences from the Panoptic dataset.
Set Sequences Frames People
Single
171026 pose1 1922 1
171026 pose2 1412 1
171204 pose1 2891 1
171204 pose2 1139 1
Piano
161029 piano1 278 2
161029 piano2 1295 1
Multi 170407 haggling a1 2489 3
ous poses. We subsampled the large sequences in time
(1 frame out of 10), since there is only little variation
between frames.
In our scanner room, the patients sometimes might
be partially occluded (e.g. by the measurement in-
struments or a wheelchair). Such exact situations are
not included in the Panoptic dataset sequences. How-
ever, some sequences show a pianist whose body is in-
deed partially occluded by her instrument, which we
used to simulate occluded patients (the “piano” set).
While other sequences with other interaction objects
are available, they are not stationary and therefore dif-
ficult to exclude from the ground truth point clouds,
explained in more detail in section 3.3.
The “multi” set shows multiple people walking
around in the small room, frequently going outside
the field-of-view of several cameras.
3.2 Camera Selection
To minimise occlusions and maximise the field-of-
view in the scanner room, the best option would be to
place the cameras in each corner of the scanner room,
providing a top-down overview.
The Panoptic dataset is recorded in a sphere-like
room with various types of cameras positioned in var-
ious locations (see figure 2). Ten wide-angle cameras
are installed at the top around the room providing a
top-down perspective. At the left of figure 2, a scheme
of the Panoptic setup is visible, with the approximated
locations and names of the cameras used in this work.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
630

Pre-Processing
2D Dilation
None
Silhouettes
YOLACT++
MobileNetV3+SSD
Visual Hull
Thresh # Cams
Thresh Confidence
Post-Processing
None
3D Dilation
Output
Figure 3: Our proposed approach showing the four input cameras, each used component, the pipeline output (red) and the
pre-processed ground truth (green).
From these 10 cameras, we select a set of four cam-
eras (blue) in such a way that they mimic the positions
of the cameras in our scanner room, (example frames
at the right-hand side of Figure 2).
During the evaluation, all nine camera combina-
tions using these four relative camera positions are
used so no camera combination is arbitrarily chosen,
(e.g. next combination in red).
3.3 Pre-processing Ground Truth
A common problem when working with 3D data
points is that the sheer amount of data increases the re-
quired computation power very quickly. The ground
truth currently contains fine 3D positions with a high
resolution, which is not required for our safeguard
system. Therefore, we quantize the points to a reso-
lution of 5cm, reducing the number of points greatly,
which leads to a lower latency (due to the decrease in
computational power).
As we mentioned, we require the ground truth
point clouds of all people present in the room. How-
ever, since these point clouds were automatically gen-
erated using Kinect cameras solely based on captured
depth maps, other objects are present in these point
clouds. Therefore, in our second pre-processing step,
we filter out the people points using the available an-
notated 3D poses.
Since the point clouds were automatically gener-
ated based on Kinect depth maps only, the 3D per-
son point clouds are hollow inside. The lack of these
points poses no problem for a robot path planner since
the outer points will shield the inner points. However,
when comparing our generated 3D occupancy maps
to the ground truth, it will seem to have a decreased
accuracy due to these hollow regions. Therefore, we
fill the hollow upper body region, using the ground
truth 3D pose points of the neck and waist. These 3D
points are dilated once in 3D, creating a 3D volume
that we add to the ground truth point cloud to fill the
hollow upper body region.
4 APPROACH
In the previous section, we discussed the Panoptic
dataset, providing calibrated cameras images from
various positions and the pre-processed 3D point
cloud ground truth of each person. Our main goal
is acquiring a 3D safeguard zone that makes it pos-
sible to restrict the movements of robotic parts in the
scanner room, achieved by calculating a 3D people
occupancy map. Figure 3 shows a block diagram of
our complete approach. As input, we use four dif-
ferent viewpoints (i.e. cameras). In a first step, we
calculate the silhouettes of each person in the image.
These silhouettes are optionally pre-processed with a
2D dilation before the visual hull is calculated. Next,
this visual hull can be post-processed with a 3D di-
lation before being used as a 3D occupancy map. In
the next subsections, we describe each block in more
detail.
4.1 Silhouettes
Since our specific use-case involves person safety as-
pects, the latency should be minimal. Furthermore,
recall is more important than precision. Indeed, it is
much more costly to miss a person (which might get
hit by the robotic arm), then to generate a larger area
where the robot cannot be used. As a latency starting
point, we chose to use the MobileNetV3+SSD detec-
tor (both the small and large model) (Howard et al.,
2019). These models are heavily optimised for mo-
bile devices with low computational power and there-
fore have a small latency. However, this framework
outputs bounding boxes. Using a bounding box in-
stead of a silhouette to calculate the visual hull will
yield over-estimating the person’s 3D volume. There-
fore, we compare this with the single-shot instance
segmentation technique(Bolya et al., 2019a), trained
to output the masks of detected objects. Figure 4 illus-
trates an output example of these three different mod-
els on a single time frame from four viewpoints from
the Panoptic dataset. These visual results already re-
veal interesting observations. Visually comparing the
small MobileNetv3+SSD model output( fig. 4a), with
Multi-view Real-time 3D Occupancy Map for Machine-patient Collision Avoidance
631

(a) MobileNetV3+SSD Small
(b) MobileNetV3+SSD Large
(c) YOLACT++
Figure 4: Example output detections of the different frameworks.
the large model (fig. 4b), we notice that in almost all
cases all persons are found. The bounding box from
the small model is sometimes overestimated, and the
small person in the entry of the dome was not found.
Whereas the large model had a better detection rate,
the bounding boxes are more accurate and the small
person in the entry was found.
Because the overestimated detection only occurs
on a single frame, and the person in the entry is
actually not part of the ground truth. The output
of YOLACT++ (fig. 4c), is capable of detecting the
object bounding box along with the instance seg-
ments of each person with high confidence. How-
ever, YOLACT++ does not use pixel classification to
output these instance segmentation but uses prototype
masks to aggregate the single segmentation mask.
Each prototype contains both positive segmentation
pixel areas that are part of the object, and negative
pixels areas (background or a part of another object).
Together with the prototype mask, mask coefficients
are calculated that combine all the prototypes to either
agree or disagree together creating a full instance seg-
mentation mask. Therefore, the contours might have
a little offset from the actual person contour.
4.2 Visual Hull
We propose to construct the 3D occupancy map as fol-
lows. Firstly, Our case requires a minimum resolution
of 5 cm (see section evaluation 5.1 for more details on
the required specs), thus the resolution of the occu-
pancy map is reduced to 5cm. The total safeguard 3D
voxel grid contains 600.000 voxels, which are by de-
fault unoccupied. Next, we determine which of these
points are occupied (by persons) by combining the sil-
houette output from multiple top-down perspectives,
as determined above. For each camera viewpoint, we
calculate the projection cone of this camera. Where
it intersects with a silhouette, we increment the cor-
responding value for that voxel. This way, the final
voxel grid values represent the number of cameras
that contained a projected point of a silhouette. This
value, together with the minimal required cameras,
can be varied to output the 3D occupancy map (see
section 5.2).
4.3 Pre-and Post-processing
As explained before, the instance segmentation con-
tours often have a slight offset from the actual person
silhouette. This implies that some 3D projected points
(that should be part of the silhouette) fall outside of
the contour around the person. We quantized our grid
to a resolution of 5cm to decrease the number of 3D
points and to increase the processing speed. How-
ever, the quantization of the points can cause some
projected 3D points positioned near the contour to
either be shifted inside or outside of the person sil-
houette. We tested two different approaches to re-
duce the aforementioned effects. We can either dilate
the 3D occupancy map or perform a dilation of the
silhouettes output from YOLACT++ (i.e. in the 2D
domain). The latter is done by adding margins near
the contours, which allow for more projected points
to fall within the person detection silhouette. When
comparing both approaches, they both showed an in-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
632

crease in recall, however, the 2D dilation is far less
computationally expensive. Furthermore, the time re-
quired to execute 2D dilation only slightly depends on
the number of detections, while the execution time of
the 3D dilation highly depends on the number of 3D
points. Therefore, we use the 2D dilation over the 3D
dilation.
5 EVALUATION
For our use case, a 3D safeguard system capable of
preventing collisions with people in an automated X-
ray scanner room, we search an optimal trade-off be-
tween speed and accuracy. This section first specifies
the minimum requirements for such a system devised
together with a manufacturer of X-ray scanner rooms,
followed by the qualitative results of our approach on
a single frame and video. Next, we will quantitatively
evaluate the accuracy, and discuss the accuracy-speed
trade-off. Finally, we will discuss the robustness of
our framework against occlusions.
5.1 Specifications
Experts in the field indicate a minimal speed of 5FPS,
in other words, the 3D safeguard output of the system
has a maximum allowed latency of 200ms. Further-
more, the 3D outputs must have a resolution of 5cm.
Such latency and resolution allow for optimal robot
control while assuring maximal safety. As explained
above, we prefer high accuracy and give priority to
high recall over a high precision.
5.2 3D Map
To compare the accuracy of our approach we com-
pare the calculated safeguard voxel grid with the pre-
processed ground truth. For each voxel in the ground
truth, we check whether it is found in the safeguard
voxel grid, producing a true positive. If this is not
the case this will produce a false negative. Finally, all
safeguard voxels that were not present in the ground
truth are counted as false positives. We sweep over the
threshold on the detection confidence of the bounding
boxes and silhouettes, using the previously mentioned
metrics to calculate precision-recall curves which al-
low us to define an optimal point, as shown in figure
6. Instead of determining an optimal point, we use
the precision at a minimum recall of 0.75 as a met-
ric to compare the different models and pre- or post-
processing techniques. We used the same method to
evaluate the influence of different minimum required
number of viewpoints from which a person must be
(a) Single set
(b) Piano set
(c) Multi set
Figure 5: Example output showing the output of Mo-
bileNetV3+SSD small, large and YOLACT++ with 2D di-
lation.
visible. With a minimum of 2 cameras producing a
higher recall with lower precision due to filtering out
fewer voxels. Whereas a min. of 4 cameras is more
strict with a lower recall and higher precision. From
the 10 different camera viewpoints, we consecutively
select a set of four relative camera positions (see fig. 2
for an example of two sets - red and blue). In total.
we thus evaluate 10 different sets of camera positions
for each frame. A single-precision result is calculated
by using the micro-average of all 10 sets. Figure 5
shows a qualitative evaluation for each test set (with
minimum 3 cameras), showing the detections on the
camera frames along with the 3D ground-truth and
output for each model
1
. Both figure 5a and 5b show
the output of a single person, clearly indicating that
1
Full video: https://youtu.be/n-HfHBgd-EI
Multi-view Real-time 3D Occupancy Map for Machine-patient Collision Avoidance
633

mobilenet_large
bgs
bgs
yolact++
mobilenet_small yolact++_2d
recall = 0.75
0.0 0.2 0.4 0.6 0.8 1.0
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
min cams = 2
0.0 0.2 0.4 0.6 0.8 1.0
Recall
min cams = 3
0.0 0.2 0.4 0.6 0.8 1.0
Recall
min cams = 4
(a) Single set
0.0 0.2 0.4 0.6 0.8 1.0
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
min cams = 2
0.0 0.2 0.4 0.6 0.8 1.0
Recall
min cams = 3
0.0 0.2 0.4 0.6 0.8 1.0
Recall
min cams = 4
(b) Piano set
0.0 0.2 0.4 0.6 0.8 1.0
Recall
0.0
0.2
0.4
0.6
0.8
1.0
Precision
min cams = 2
0.0 0.2 0.4 0.6 0.8 1.0
Recall
min cams = 3
0.0 0.2 0.4 0.6 0.8 1.0
Recall
min cams = 4
(c) Multi set
Figure 6: PR-curves of each model for the different subsets.
the 3D output of YOLACT++ based silhouettes (red)
is finer, compared to the bounding boxes approach
(yellow and blue). However, bounding boxes yield
a more coarse 3D estimation, which is to be expected
an overestimation of the volume of the person. For
the application at hand, this means that these meth-
ods will produce a wider safeguard zone around the
persons, hence a better recall (but worse precision) as
will be demonstrated below. Figure 5c shows a sim-
ilar behaviour, with less space between people near
each other on the bounding box method compared to
the instance segmentation approach.
5.3 Precision vs. Speed
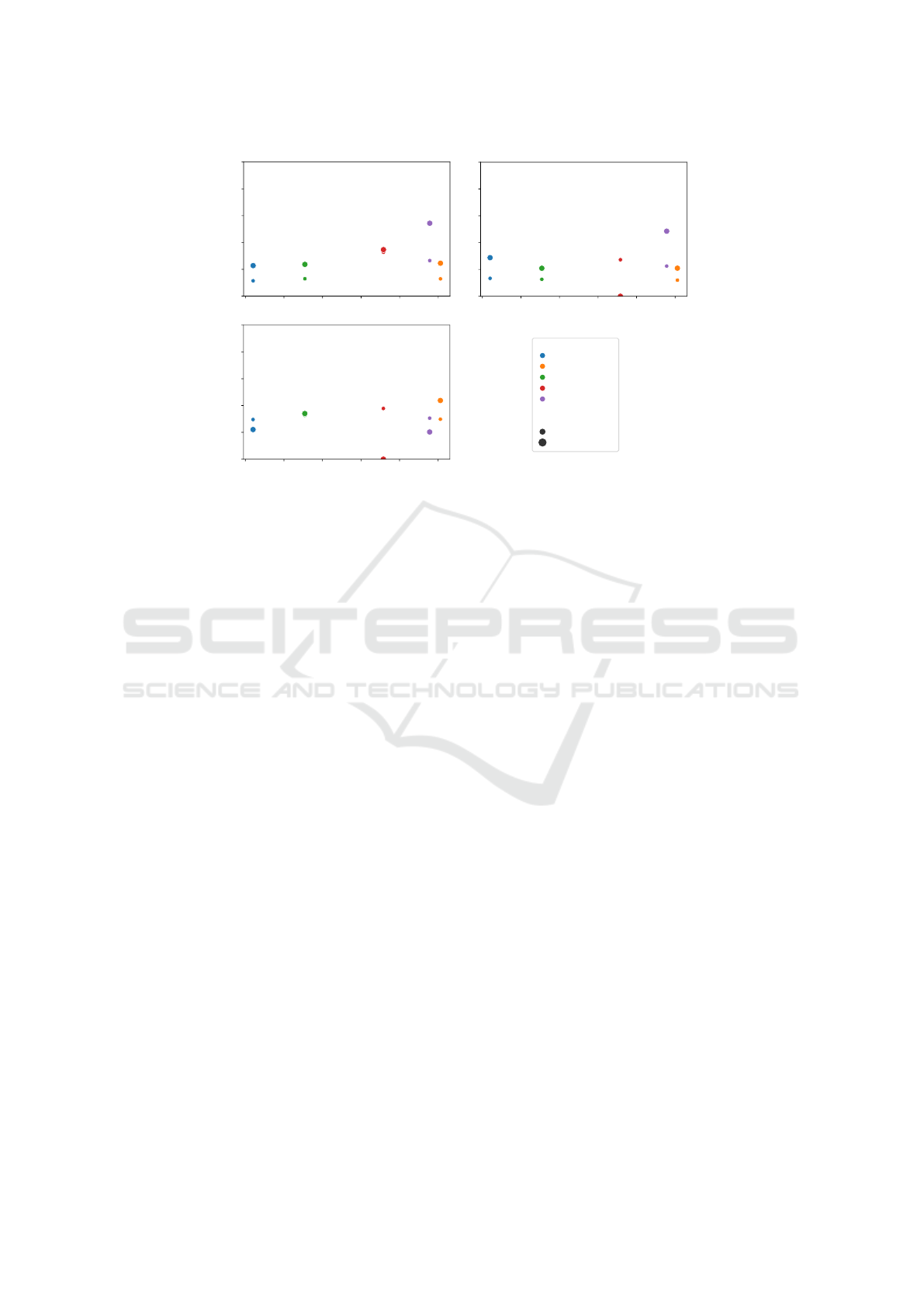
Figure 7 display the measured performance of the sin-
gle, piano and multi test sets, showing the latency ver-
sus the precision (with a set minimum recall of 0.75)
for each model. Each configuration is represented
by a circle, with the colour representing the used de-
tection method. The size of the circle represents the
set required minimum number of viewpoints that con-
tributed to the voxels. All these experiments measur-
ing latency were executed on an i7-8750H with 32 GB
RAM with an RTX 2060 GPU.
As a baseline method to compare against, we
also used silhouettes procured by a Mixture of Gaus-
sians background subtraction background subtractor
(BGS) approach with an image resolution of 480 ×
270 (Zivkovic, 2004; Zivkovic and Van Der Heijden,
2006). Although we expected the MobileNetV3+SSD
models (using an image resolution of 224 × 224)
to be the best detection based approach, in terms
of latency, the large model seems to be almost 5%
slower than the YOLACT++ model with a larger in-
put resolution of 550 × 550. In terms of performance,
we show results as comparison in figure 6, showing
that YOLACT++ far outperforms both the BGS and
MobileNetV3+SSD. For MobileNetv3+SSD this is
mainly caused by the overestimating of the bounding
box silhouettes, causing many false positives. With
the BGS approach, we see that certain body parts are
missing, which required us to add sufficient dilation
to reach the minimum recall of 75%. Moreover, using
background subtraction it is unavoidable that people
disappear in the background when immobile, which is
in our application always the case as patients are lay-
ing on a table or standing still during scans. The BGS
results on this Panoptic dataset hence show a better
performance than what is expected in a real scanning
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
634
0.2
0.4
0.6
0.8
1.0
precision at recall=0.75
Single person
model
bgs
mobilenet_large
mobilenet_small
yolact++
yolact++_2d
min cams
2
3
out of 4
out of 4
100 105 110 115 120 125
latency
0.0
0.2
0.4
0.6
0.8
1.0
precision at recall=0.75
Single person
100 105 110 115 120 125
latency
0.0
0.2
0.4
0.6
0.8
1.0
precision at recall=0.75
Multiple people
100 105 110 115 120 125
latency
0.0
0.2
0.4
0.6
0.8
1.0
precision at recall=0.75
Partially occluded single
Figure 7: Latency vs. precision at a minimum recall of 0.75 for all sequences.
room. In the case of the Yolact++ approach, with no
missing body parts, adding the 2D dilation causes an
increase in both recall and precision.
5.4 Occlusions
In a second experiment, we evaluate the performance
of our framework with regard to occlusion. As seen
for the single test set results (top-left graph of fig. 7),
our framework achieves good performance in both
speed and accuracy. However, for sets with occlusion
(piano set and multi set, a drop in precision and recall
is seen. Figures 6c and 6b show that a decrease occurs
when the minimum number of required viewpoints is
set to 4 (i.e. all 4 cameras need to find the detections),
even causing some approaches to not reach the mini-
mum recall of 75%. This threshold is considered very
strict since any voxel not projected within a detection
on all four cameras is filtered out. Depending on the
level of occlusion, this is to be expected since missing
parts will not be compensated for by the other cam-
eras with no occlusion. Hence, our approach enables
us to create a safeguard zone, even around partially
occluded people, by setting this amount of required
views lower than the number of cameras installed.
6 CONCLUSIONS
In this work, we searched for a detection based ap-
proach capable of calculating a 3D safeguard region
to ensure person safety by restricting the movements
of cobots in e.g. medical scanning rooms. In this
paper, we proposed to extend the classic visual hull
3D estimation technique with CNN-based person de-
tection and segmentation methods, instead of the tra-
ditionally used background subtraction. We evalu-
ated several techniques on a public dataset comparing
their latency and precision at a guaranteed recall. Our
results show that the 2D dilated Yolact++ approach
reaches a precision of 54% with a recall of 75% with
a latency of 123ms. Even though the latency is higher
compared to a traditional BGS, it achieves higher pre-
cisions and still performs faster than the maximum la-
tency of 200 ms. In future work, a dataset featuring
the actual equipment could be gathered to evaluate
even further, adding the challenge of mobile cobots
causing more moving occlusions that are disastrous
for BGS.
ACKNOWLEDGEMENTS
This work is supported by VLAIO and AGFA NV via
the Start to Deep Learn TETRA project.
REFERENCES
Abdelhak, S. and Chaouki, B. M. (2016). High perfor-
mance volumetric modelling from silhouette: Gpu-
image-based visual hull. In IEEE/ACS 13th Interna-
tional Conference of Computer Systems and Applica-
tions (AICCSA). IEEE.
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019a).
Yolact++: Better real-time instance segmentation.
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019b). Yolact:
Real-time instance segmentation. In ICCV.
Multi-view Real-time 3D Occupancy Map for Machine-patient Collision Avoidance
635

Cai, Z. and Vasconcelos, N. (2019). Cascade r-cnn: High
quality object detection and instance segmentation.
arXiv preprint arXiv:1906.09756.
Edward, J., Wannasuphoprasit, W., and Peshkin, M. (1999).
Cobots: Robots for collaboration with human opera-
tors.
Esteban, C. H. and Schmitt, F. (2004). Silhouette and stereo
fusion for 3d object modeling. Computer Vision and
Image Understanding.
Furukawa, Y. and Ponce, J. (2006). Carved visual hulls for
image-based modeling. In European Conference on
Computer Vision. Springer.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In CVPR. IEEE.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
et al. (2019). Searching for mobilenetv3. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision.
Joo, H., Liu, H., Tan, L., Gui, L., Nabbe, B., Matthews,
I., Kanade, T., Nobuhara, S., and Sheikh, Y. (2015).
Panoptic studio: A massively multiview system for so-
cial motion capture. In The IEEE International Con-
ference on Computer Vision (ICCV).
Joo, H., Simon, T., Li, X., Liu, H., Tan, L., Gui, L.,
Banerjee, S., Godisart, T. S., Nabbe, B., Matthews,
I., Kanade, T., Nobuhara, S., and Sheikh, Y. (2017).
Panoptic studio: A massively multiview system for so-
cial interaction capture. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Laurentini, A. (1994). The visual hull concept for
silhouette-based image understanding. IEEE Trans-
actions on pattern analysis and machine intelligence.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In ECCV. Springer.
Matusik, W., Buehler, C., Raskar, R., Gortler, S. J., and
McMillan, L. (2000). Image-based visual hulls. In
Proceedings of the 27th annual conference on Com-
puter graphics and interactive techniques.
Mohammed, A., Schmidt, B., and Wang, L. (2017). Ac-
tive collision avoidance for human–robot collabora-
tion driven by vision sensors. International Journal
of Computer Integrated Manufacturing.
Navarro, S. E., Marufo, M., Ding, Y., Puls, S., G
¨
oger, D.,
Hein, B., and W
¨
orn, H. (2013). Methods for safe
human-robot-interaction using capacitive tactile prox-
imity sensors. In IEEE/RSJ International Conference
on Intelligent Robots and Systems. IEEE.
Nie, B. X., Wei, P., and Zhu, S.-C. (2017). Monocular 3d
human pose estimation by predicting depth on joints.
In 2017 IEEE International Conference on Computer
Vision (ICCV). IEEE.
Peshkin, M. and Colgate, J. E. (1999). Cobots. Industrial
Robot: An International Journal.
Phan, T.-P., Chao, P. C.-P., Cai, J.-J., Wang, Y.-J., Wang, S.-
C., and Wong, K. (2018). A novel 6-dof force/torque
sensor for cobots and its calibration method. In IEEE
International Conference on Applied System Invention
(ICASI). IEEE.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems.
Safeea, M. and Neto, P. (2019). Minimum distance calcu-
lation using laser scanner and imus for safe human-
robot interaction. Robotics and Computer-Integrated
Manufacturing.
Sarafianos, N., Boteanu, B., Ionescu, B., and Kakadiaris,
I. A. (2016). 3d human pose estimation: A review
of the literature and analysis of covariates. Computer
Vision and Image Understanding, 152.
Shi, S., Guo, C., Jiang, L., Wang, Z., Shi, J., Wang, X.,
and Li, H. (2020). Pv-rcnn: Point-voxel feature set
abstraction for 3d object detection. In CVPR.
Slembrouck, M., Luong, H., Gerlo, J., Sch
¨
utte, K.,
Van Cauwelaert, D., De Clercq, D., Vanwanseele,
B., Veelaert, P., and Philips, W. (2020). Multiview
3d markerless human pose estimation from openpose
skeletons. In International Conference on Advanced
Concepts for Intelligent Vision Systems. Springer.
Srivastav, V., Issenhuth, T., Kadkhodamohammadi, A.,
de Mathelin, M., Gangi, A., and Padoy, N. (2018).
Mvor: A multi-view rgb-d operating room dataset for
2d and 3d human pose estimation. arXiv preprint
arXiv:1808.08180.
Vicentini, F. (2020). Collaborative robotics: a survey. Jour-
nal of Mechanical Design.
Villani, V., Pini, F., Leali, F., and Secchi, C. (2018). Survey
on human–robot collaboration in industrial settings:
Safety, intuitive interfaces and applications. Mecha-
tronics.
Vlasic, D., Baran, I., Matusik, W., and Popovi
´
c, J. (2008).
Articulated mesh animation from multi-view silhou-
ettes. In ACM SIGGRAPH 2008 papers.
Yoo, J. H., Kim, Y., Kim, J. S., and Choi, J. W. (2020). 3d-
cvf: Generating joint camera and lidar features using
cross-view spatial feature fusion for 3d object detec-
tion. arXiv preprint arXiv:2004.12636.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In Proceedings of
the 17th International Conference on Pattern Recog-
nition, 2004. ICPR 2004. IEEE.
Zivkovic, Z. and Van Der Heijden, F. (2006). Efficient adap-
tive density estimation per image pixel for the task of
background subtraction. Pattern recognition letters.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
636
