
Reduction in Communication via Image Selection for Homomorphic
Encryption-based Privacy-protected Person Re-identification
Shogo Fukuda
1
, Masashi Nishiyama
2
and Yoshio Iwai
2
1
Graduate School of Sustainability Science, Tottori University, Tottori, Japan
2
Graduate School of Engineering, Tottori University, Tottori, Japan
Keywords:
Image Selection, Homomorphic Encryption, Features, Person Re-identification, Privacy Protection.
Abstract:
We propose a method for reducing the amount of communication by selecting pedestrian images for privacy-
protected person re-identification. Recently, it has become necessary to pay attention to how features cor-
responding to personal information can be protected. Owing to homomorphic encryption, which enables a
distance between features to be computed without decryption, our method can use a cloud server on a public
network while protecting personal information. However, we must consider the problem of the large amount
of communication that occurs between camera clients and the server when homomorphic encryption is used.
Our method aims to reduce the amount of this communication by selecting appropriate pedestrian images
using reference leg postures. In our experiment, we confirmed that the amount of communication dynami-
cally reduces without significant degradation in the accuracy of privacy-protected person re-identification with
homomorphic encryption.
1 INTRODUCTION
Multiple-camera monitoring systems are needed for
realizing a safe and secure society. Such systems are
useful when searching for a criminal or lost person. In
this paper, we consider a multiple-camera monitoring
system set in indoor corridors where pedestrians must
pass when moving between rooms.
The postures of the pedestrians change over time
while they are walking. To correctly match pedes-
trian images acquired from the same individual, it is
necessary to extract features that represent identities
from the images and compute the distances between
these features, as described in (Gong et al., 2014;
Wang et al., 2018; Almasawa et al., 2019; Ye et al.,
2020; Leng et al., 2020). For example, some exist-
ing methods (Nakajima et al., 2003; Bird et al., 2005;
Farenzena et al., 2010) extract low-level image fea-
tures such as color and gradient histograms, and other
existing methods (Bourdev et al., 2011; Layne et al.,
2012; Zhang et al., 2014; Lin et al., 2019; Zhao et al.,
2019) extract human attribute features such as gender
and age.
When designing a multi-camera monitoring sys-
tem, we must pay attention to the fact that the features
used in person re-identification are personal informa-
tion. This is because the features are personally iden-
tifiable
1
. Thus, multiple-camera monitoring systems
need to handle features with encryption so that third
parties cannot access them. To protect the personal in-
formation of the features, we focus on homomorphic
encryption (Brakerski et al., 2012). There are some
prevalent methods of pattern recognition using ho-
momorphic encryption, such as principal component
analysis (Lu et al., 2016) and deep learning (Dowlin
et al., 2016). Homomorphic encryption also enables
the distance to be computed using addition and multi-
plication operations without decrypting the target fea-
tures, as described in (Morita et al., 2018). In this
paper, we apply homomorphic encryption to features
for person re-identification and perform the distance
computation while the features are still encrypted.
When homomorphic encryption is used, this
causes a severe problem in the multi-camera moni-
toring system in that the amount of communication
between each camera client and the server becomes
very large. Since the data size of features after homo-
morphic encryption is much larger than that before
encryption, the amount of communication per feature
increases. Furthermore, the data size is proportional
to the number of pedestrian images, which is the stage
before the conversion to features, and thus the amount
1
General Data Protection Regulation (May 25, 2018)
36
Fukuda, S., Nishiyama, M. and Iwai, Y.
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification.
DOI: 10.5220/0010190000360047
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
36-47
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of communication further increases when the number
of images is increased.
To avoid the problem of the data size, it is neces-
sary to devise ways to reduce the amount of commu-
nication. There are two possible ways: by reducing
the number of dimensions of the features or by se-
lecting the features to be sent to the server. In this
paper, we focus on the feature selection approach. In
particular, we consider reducing the number of pedes-
trian images (before feature extraction), which then
reduces the amount of communication. Many pedes-
trian images are acquired as a person walks in the field
of view of a camera client. Specifically, the number of
pedestrian images increases as a multiplication of the
number of people in the field of view, the time length,
and the camera’s frame rate. Moreover, the number of
cameras causes a problem for the server side. If all the
acquired pedestrian images are directly received at the
cloud server, the amount of communication increase
drastically.
In this paper, to reduce the number of pedes-
trian images and the amount of communication, we
propose a method for selecting appropriate pedes-
trian images for feature extraction for person re-
identification from among the large number of pedes-
trian images acquired from each camera. We incor-
porate an image selection approach into a privacy-
protected person re-identification system using ho-
momorphic encryption. To do this, we focus on the
cyclic motion of leg postures during walking as a cue
for selecting pedestrian images. Using the leg pos-
ture as a cue, our method extracts the features from
the pedestrian images containing the same appear-
ances of the persons from the cameras. In our ex-
periments, we confirmed that our method effectively
reduces the number of pedestrian images while main-
taining the accuracy of privacy-protected person re-
identification.
2 RELATED WORK
We consider an idea to reduce the amount of com-
munication between the camera client and the server
for person re-identification. One idea is to apply
a tracking process (Shu et al., 2012; Kawanishi
et al., 2017; Li et al., 2013) to pedestrians in the
video sequence and extract features from the time-
series images linked by the tracking. An existing
method (Khan and Br
´
emond, 2017) extracts features
of body parts from multiple images of a time series
generated from the tracking process. This method
uses Gaussian mixture models (GMMs) to represent
the features of each body part of a person. How-
ever, GMMs have the disadvantage of a large feature
size per person caused by maintaining the mean vec-
tor and the covariance matrix. Thus, it is not suitable
for reducing the amount of communication, which is
the purpose of this paper. An existing method (Han
and Bhanu, 2006) focuses on gait features to integrate
multiple images of a time series generated from the
tracking process into a single averaged image. The
gait features containing cyclic limb movements are
represented in the single image. Because this method
assumes that one complete gait cycle has been ac-
quired, it is not possible to extract the features when
the tracking process is interrupted. In this paper, in-
stead of using tracking methods, we design a method
based on image selection.
We consider one other idea to reduce the amount
of communication, which is to reduce the dimension-
ality of the features. For example, some existing
methods (Weinberger et al., 2009; Shi et al., 2009;
Chen et al., 2015; Ullah et al., 2020; Ma et al., 2019;
Fang et al., 2020) encode features using hash func-
tions, and others (Gong et al., 2013; Ambai et al.,
2015; Irie et al., 2017; Wu et al., 2020; Zang et al.,
2019; Qayyum et al., 2019) use vector quantization
and sparse coding to reduce the dimensionality. The
large number of pedestrian images increases is still a
problem, even if hashing and sparse coding have been
applied. Thus, we develop a method to directly solve
the problem of the high number of pedestrian images.
Existing face recognition methods (Chang et al.,
2008; Z. Yang et al., 2004; Wong et al., 2011) se-
lect frontal face images from the sets of images de-
tected in a video sequence using head pose estima-
tion. Although these existing methods aim to obtain
similar effect as that of our method, it is not easy to
apply them directly to person re-identification, which
uses the whole body of a person. Indeed, the exist-
ing methods for facial image selection are not suit-
able when the person’s back is facing the camera.
Thus, our method selects appropriate pedestrian im-
ages from the sets of images acquired from each cam-
era client.
3 PEDESTRIAN IMAGE
SELECTION FOR PERSON
RE-IDENTIFICATION
3.1 Overview
We use the leg posture to select a small number of ap-
propriate pedestrian images from the many pedestrian
images acquired from each camera. A person walking
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification
37

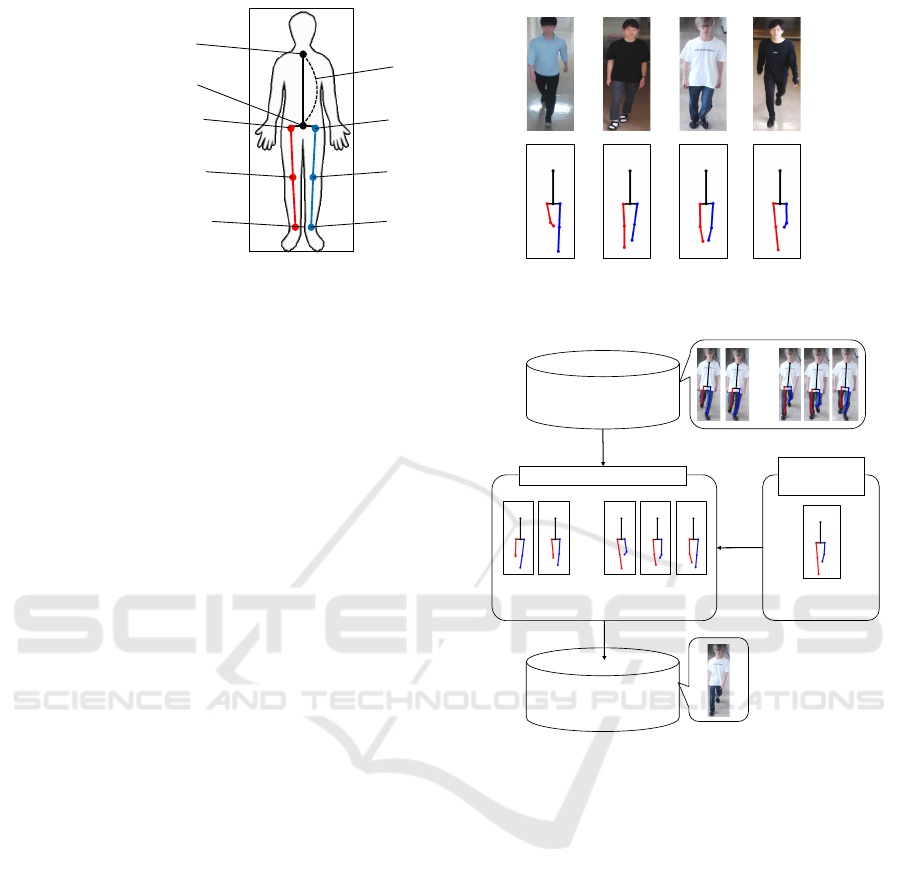
Right&hip Left&hip
Right&knee Left&knee
Right&ankle Left&ankle
Figure 1: Body joints for representing a spatial cue of the change of leg posture. The temporal cue refers to the cyclic
movements of the legs of the body joints that change over time.
10%
Support:+Right+leg+
40% 10% 40%
Ratio+included+in+gait+cycle
Support:+Both+legs+ Support:+Left+leg+ Support:+Both+legs+
T
1
T
2
T
3
T
4
Figure 2: Representation of the temporal cues of leg posture using the categories based on the gait cycle. We represent each
category in time direction from T
1
to T
4
. In general, the duration of one cycle of the gait cycle is about one second.
in a corridor repeats a cyclic motion of her/his legs.
Thus, we assume that there will be many opportuni-
ties to acquire pedestrian images containing reference
leg postures. If we acquire a small number of pedes-
trian images with the same reference leg posture, we
can expect to re-identify a person without decreasing
the accuracy.
We discuss the reason for the use of leg posture
below. The same arm posture cannot be repeatedly
acquired in the same way as leg posture because the
arm movements during walking are more flexible, for
instance, if the pedestrian is carrying something or
folding his/her arms. The head and torso postures are
less effective in reducing the number of images than
the leg postures because the same posture of the head
and torso frequently appears during walking. Thus,
we adopt the leg posture to reduce the number of
pedestrian images while maintaining the person re-
identification accuracy.
The leg posture of a walking person is represented
using spatial and temporal cues. A spatial cue refers
to the change of the locations of the body joints.
Specifically, we use the cue of the spatial locations
of the body joints shown in Figure 1. The temporal
cue refers to the cyclic movements of the legs of the
body joints that change over time. In the next section,
we describe the motion cycle of the leg posture in de-
tail to consider the reference leg postures for image
selection.
3.2 Gait Cycle of the Leg Posture
The motion change in the leg posture during walk-
ing is called the gait cycle in (Perry and Burnfield,
2010). It is stated that the gait cycle is repeated as a
cyclic leg movement while walking. The gait cycle is
divided into four categories T
c
(c = 1, . . . , 4) accord-
ing to the differences in the leg postures, as shown in
Figure 2. Although the start time of the gait cycle is
not clearly defined in (Perry and Burnfield, 2010), we
treat the moment when the left leg leaves the ground
as the start time of the gait cycle. We represent each
category in time direction from T
1
to T
4
. In general,
the duration of one cycle of the gait cycle is about
one second. Categories T
1
and T
3
are both 40% of the
duration, and T
2
and T
4
are both 10% of the duration.
3.3 Reference Leg Postures for Image
Selection
We describe how to generate reference leg postures
P
c
(c = 1, . . . , 4), which are the cues for selecting ap-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
38
Torso
: Right-hip
: Left-hip
: Right-knee
: Left-knee
: Right-ankle
: Left-ankle
Neck
Waist
1
3
5
4
6
2
𝒃
𝒃
𝒃
𝒃
𝒃
𝒃
Figure 3: Representation of body joints b
b
b
j
after the length of the torso has been normalized. We assign two-dimensional
locations to the body joints b
b
b
j
( j = 1, . . . , 6) of each person at each time in each category T
c
.
propriate pedestrian images. We represent the tem-
poral cue of the leg posture using each T
c
of the gait
cycle. We also represent the spatial cue as the average
locations of the body joints in each T
c
. To generate
the reference leg postures, we use time-series signals
of the locations of the body joints in the gait cycle
observed from various persons. To do this, we need
to consider the temporal variation of the locations for
each person and the spatial variation of the locations
among them. We describe the detail generation of the
reference postures below.
Suppose that the three-dimensional locations of
the body joints are observed by a motion capture sys-
tem during the gait cycle of a large number of indi-
viduals. We project the body joints onto the image
plane using a predefined perspective projection ma-
trix. Here, our discussion assumes that the height and
angle of each camera set in the corridor are the same.
We normalize the scale and rotation to suppress the
differences in the body height of the persons. We then
make the length of the torso, which connects the neck
and the waist, constant in the image plane.
Figure 3 shows our representation of the body
joints after normalizing the length of the torso. Ac-
cording to the definition of the gait cycle described
in Section 3.2, we assign two-dimensional locations
to the body joints b
b
b
j
( j = 1, . . . , 6) of each person at
each time in each category T
c
. We generate the ref-
erence posture P
c
for T
c
by calculating the average
values of these two-dimensional locations. We exper-
imentally determine which of the four reference pos-
tures P
c
should be used in Section 4.
3.4 Pedestrian Image Selection
In this section, we describe how we select appropriate
pedestrian images from a set of images detected in
each camera client. Our method searches for pedes-
trian images with leg postures close to the reference
posture. An overview of this pedestrian image se-
Pedestrian images
with body joints 𝒃
𝑗
Selected images
used for
feature extraction
・・・
𝑃
𝑐
𝒃
𝑗
Search images having
close to the body joints of
Image selection
・・・
Reference
leg posture
𝑃
𝑐
Figure 4: Overview of appropriate pedestrian image selec-
tion for person re-identification. Our method searches for
pedestrian images with leg postures close to the reference
posture P
c
.
lection is shown in Figure 4. We use the reference
posture P
c
described in Section 3.3. After image se-
lection, our method extracts features for person re-
identification from the selected images.
In the following, we describe the detail of the im-
age selection. Given an image of a pedestrian, the
locations of the body joints b
b
b
j
are determined using
a two-dimensional posture prediction technique, e.g.,
OpenPose (Cao et al., 2017). To compensate for the
differences in body length between persons, we nor-
malize the locations of b
b
b
j
using the geometrical trans-
formation described in Section 3.3 so that the length
and rotation of the torso of an input pedestrian image
is equal to that of the reference posture.
We compute the cost of the difference between the
location of the body joints b
b
b
j
in the reference posture
and that of the body joints in the normalized posture
using the L2 norm. If this cost is less than or equal to
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification
39
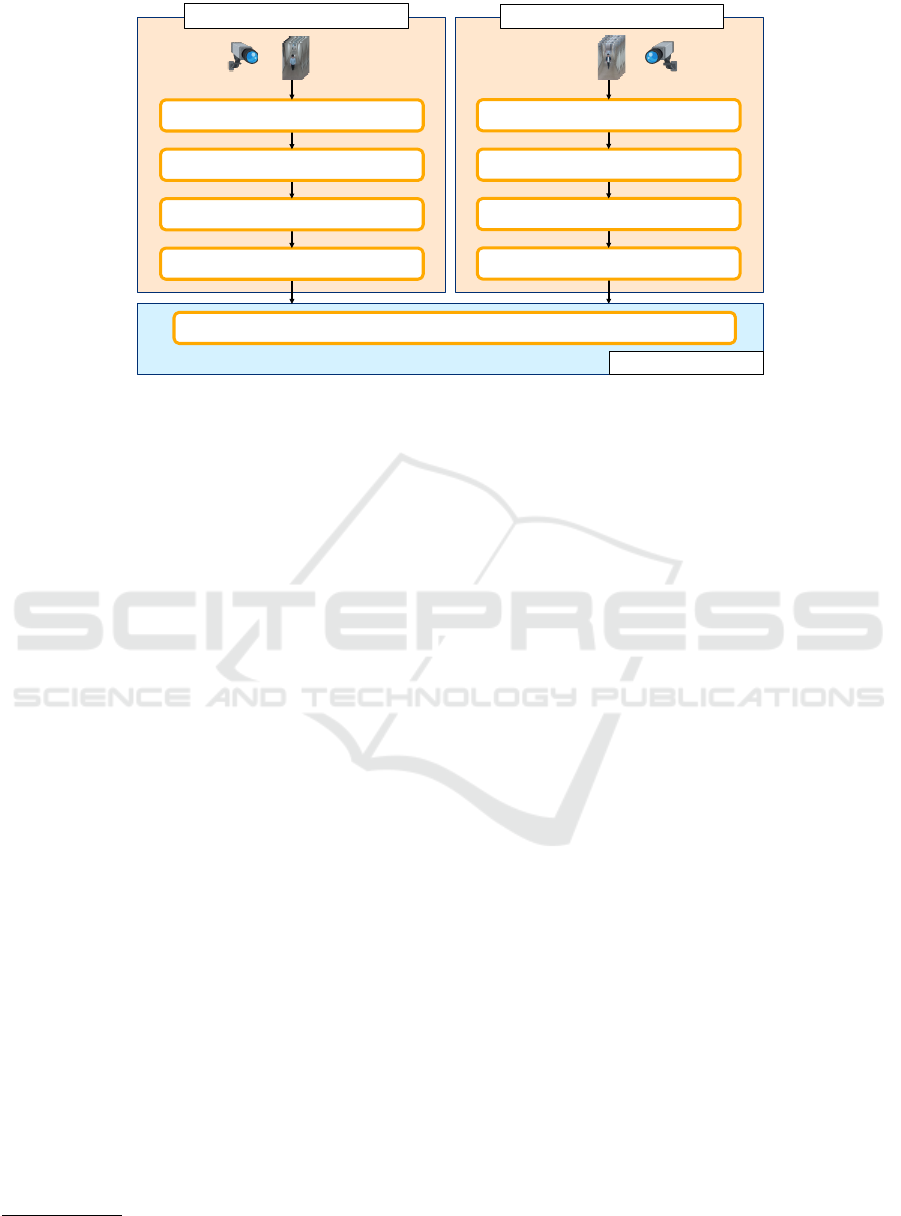
: Encryption
: Quantization
: Feature extraction
S2#
S3#
S4#
Public server
###########################:#Distance#computation#without#decryption
S5
: Image selection
S1##
: Encryption
: Quantization
: Feature extraction
S2#
S3#
S4#
: Image selection
S1##
Camera#client#at
Camera client at
L
1
L
2
Figure 5: Overview of our method for privacy-protected person re-identification. In S1, our method selects the appropriate
pedestrian images at each camera client. In S2, our method extracts features from the selected pedestrian images using
co-occurrence attributes. In S3, our method applies linear quantization to the features as pre-processing for homomorphic
encryption. In S4, our method encrypts the quantized features. Then, our method sends them from each camera client to the
server. In S5, our method calculates the distance between the received features without decrypting them in the server.
a threshold R, our method determines that the pedes-
trian image containing a similar b
b
b
j
is suitable for fea-
ture extraction for person re-identification. Note that
we experimentally determined R so that one or more
images of each person are selected for each camera
client while she/he exists in the field of view of the
camera.
3.5 Privacy-protected Person
Re-identification
Figure 5 shows an overview of our method for
privacy-protected person re-identification. In S1, our
method selects the appropriate pedestrian images at
each camera client (L
1
, L
2
) using body joint b
b
b
j
with
the procedure described in Section 3.4. In S2, our
method extracts features f
f
f
q
and f
f
f
t
from the selected
pedestrian images using co-occurrence attributes pro-
posed by (Nishiyama et al., 2016). Co-occurrence
attributes are represented by combinations of phys-
ical and adhered human characteristics (e.g., a man
wearing a suit, a 20-something woman, or a woman
with long hair who is wearing a skirt). In S3, our
method applies linear quantization to the features as
pre-processing for homomorphic encryption. In S4,
our method encrypts the quantized features using the
fully homomorphic encryption (FHE) library
2
. Then,
our method sends them from each camera client to
the server. In S5, our method calculates the distance
between the received features f
f
f
q
and f
f
f
t
without de-
2
HElib https://github.com/shaih/HElib
crypting them in the server. We use the large mar-
gin nearest neighbor (LMNN) proposed by (Wein-
berger and Saul, 2009), which is a metric learning
technique. The details of the distance computation
for privacy-protected person re-identification are de-
scribed in (Morita et al., 2018). In our system, it is no
longer necessary to decrypt the features on the server.
Thus, we believe that it is possible to operate a secure
system for privacy-protected person re-identification.
4 EXPERIMENTS
4.1 Experimental Conditions
We confirmed whether our method could reduce the
amount of communication used for privacy-protected
person re-identification. In particular, we evaluated
the effectiveness of pedestrian image selection using
the reference leg posture. We used the first match rate
to evaluate the accuracy of person re-identification.
We also used the reduction rate to evaluate the amount
of communication. We used pedestrian images from
one camera client as the target and pedestrian im-
ages from another camera client as the query. We
selected pedestrian images using each reference pos-
ture (P
1
, . . . , P
4
). Next, we computed the average of
the first match rate for the target and query images
described above. The reduction ratio is the ratio of
the number of images not selected by the method to
the number of pedestrian images when no image se-
lection is used. We averaged the reduction rates over
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
40

𝑃
1
𝑃
2
𝑃
3
𝑃
4
Figure 6: Reference leg postures P
c
(c = 1, . . . , 4) generated
using the projection matrix of the TUP dataset.
𝐿
1
𝐿
2
𝐿
4
𝐿
3
𝐿
5
𝐿
6
Figure 7: Examples of images acquired from the camera
clients (L
1
, . . . , L
6
) in the TUP dataset.
various combinations of camera clients.
In this experiment, we used the TUP (Tottori Uni-
versity Pedestrian) dataset, which we originally col-
lected, and a publicly available MARS (Motion Anal-
ysis and Re-identification Set) (Zheng et al., 2016)
dataset. The details of each dataset are described in
Sections 4.3 or 4.4, respectively. First, we describe
the parameters of person re-identification. We set the
dimension of features f
f
f
q
or f
f
f
t
to 95. We used 200
pedestrian images from the SARC3D dataset (Baltieri
et al., 2010) to generate a metric matrix for LMNN in
the experiments on the TUP dataset. For the experi-
ments on the MARS dataset, we used 1000 randomly
selected images for the LMNN metric matrix from the
training images included in the MARS dataset.
4.2 Generation of the Reference Leg
Postures
We generated the reference postures using the AIST
Gait Database 2015 provided by (Kobayashi et al.,
2015). The dataset consists of 214 healthy Japanese
participants. The three-dimensional locations of the
body joints were measured using a motion capture
system from walking participants. We used 100 par-
ticipants randomly selected from the dataset and av-
eraged the locations of the body joints of each par-
ticipant during one gait cycle using the procedure de-
scribed in Section 3.3. By averaging the locations of
the participants, we generated a reference posture P
c
for each category T
c
. Note that the motion capture
sensor attached to the surface of the body cannot di-
rectly measure the body joints b
b
b
j
( j = 3, . . . , 6) in Fig-
ure 3. We used average locations from several periph-
eral joints. Because the camera settings are differ-
ent for the TUP and MARS datasets, we used a per-
spective projection matrix manually adjusted to each
dataset. Figure 6 shows the reference leg postures
P
c
(c = 1, . . . , 4) generated using the projection matrix
of the TUP dataset.
Next, we describe the parameters of the image se-
lection for pedestrians. OpenPose (Cao et al., 2017)
was used to predict the two-dimensional locations of
the body joints shown in Figure 3 from the pedestrian
images. We adjusted the threshold R of image selec-
tion for each dataset. As described in Section 3.4,
we searched for the best R such that one or more im-
ages were selected for each participant. We obtained
R = 100 for the TUP dataset and R = 375 for the
MARS dataset.
4.3 Evaluations on the TUP Dataset
4.3.1 Conditions of Image Acquisition
We collected pedestrian images when walking along
indoor corridors using six camera clients. Figure 7
shows examples of images acquired from the camera
clients (L
1
, . . . , L
6
) in the TUP dataset. The cameras
were set at the same height of 2.4 m from the floor.
The angles were set the same so that the center of
the camera image was located 3 m in front of it. We
used a USB camera (logicool C920, 1920 × 1080 pix-
els), and the frame rate was set to 30 fps. The num-
ber of participants was 31, but the number of people
walking at the same time was limited to one. We in-
structed the participants to pass through the center of
the corridor while walking. Figure 8 shows examples
of pedestrian images in the TUP dataset. There were
5,117 pedestrian images collected from camera client
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification
41
𝐿
1
𝐿
2
𝐿
3
𝐿
4
𝐿
5
𝐿
6
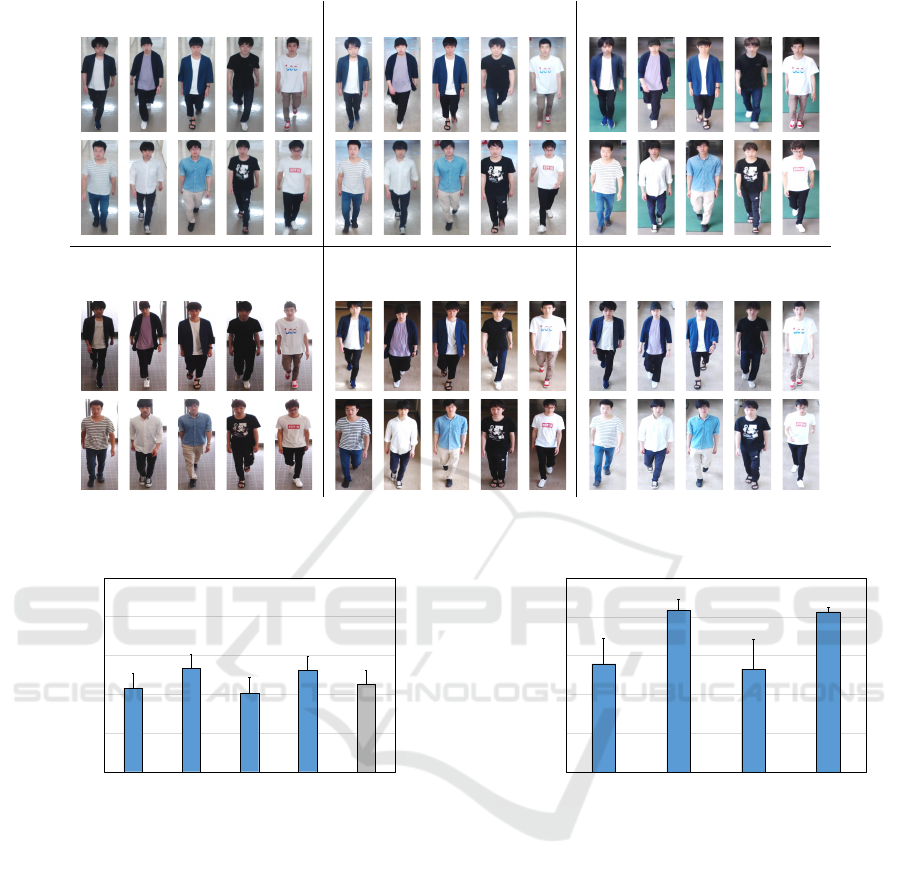
Figure 8: Examples of pedestrian images of five different individuals contained in the TUP dataset. We acquired the pedestrian
images from the camera clients (L
1
, . . . , L
6
).
Accuracy (%)
40
50
60
70
80
90
Baseline
𝑃
1
𝑃
2
𝑃
3
𝑃
4
Figure 9: Average accuracy of person re-identification for
the camera clients (L
1
, . . . , L
6
) of the TUP dataset.
L
1
, 5,060 collected from L
2
, 2,895 collected from L
3
,
2,418 collected from L
4
, 4,841 collected from L
5
, and
5,082 collected from L
6
.
4.3.2 Evaluation Results
Figure 9 shows the average person re-identification
accuracy for camera clients (L
1
, . . . , L
6
) of the TUP
dataset. Our image selection method using refer-
ence leg postures P
2
and P
4
obtained better accu-
racy than the baseline method using all pedestrian im-
ages without image selection. Figure 10 shows the
average reduction rate when using reference posture
P
c
(c = 1, . . . , 4). If image selection is not applied (the
baseline method), the reduction rate was 0%, and all
pedestrian images were used. The reduction rates of
40
50
60
70
80
90
Reduction rate
(%)
𝑃
1
𝑃
2
𝑃
3
𝑃
4
Figure 10: Average reduction rate of pedestrian images for
the camera clients (L
1
, . . . , L
6
) of the TUP dataset.
P
2
and P
4
were higher than those of P
1
and P
3
. We
believe that reference postures P
2
and P
4
, which had
high reduction rates and person re-identification accu-
racy, are suitable for the TUP dataset.
Figure 11 shows examples of selected pedestrian
images. We used reference posture P
2
at camera client
L
4
. In the figure, we listed pairs of pedestrian images
and their leg postures picked up from one gait cycle.
Our method selected 3 out of 16 images of person 1
in (a), 2 out of 16 images of person 2 in (b), 4 out
of 17 images of person 3 in (c). We see that the leg
postures of the selected pedestrian images are similar
to the reference posture P
2
in Figure 6.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
42

Selected
Sequence of pedestrian images of a person
Not selected Not selected
(a)
SelectedNot selected Not selected
(b)
SelectedNot selected
(c)
Not selected
Figure 11: Examples of pedestrian images selected using the reference posture P
2
from camera client L
4
of the TUP dataset.
In the figure, we listed pairs of pedestrian images and their leg postures picked up from one gait cycle.
4.3.3 Amount of Communication from the
Camera Client to the Server
We evaluated the amount of communication for the
case in which L
1
and L
2
camera clients send features
to the cloud server. The amount of communication
per feature increased from 760 B to 524.4 KB be-
fore and after encryption. The number of pedestrian
images detected by camera client L
1
was 5,117 and
5,060 were detected by L
2
. Moreover, the amount of
communication of the baseline method with the en-
crypted features extracted from all the pedestrian im-
ages was 2.68 GB for L
1
and 2.65 GB for L
2
. In con-
trast, when the pedestrian images were selected using
reference pose P
2
, the number of pedestrian images
was reduced to 903 for L
1
and 807 for L
2
. The amount
of communication of our method was 0.47 GB for
L
1
and 0.42 GB for L
2
. We see that the amount of
communication and number of images were both re-
duced by 82.4% in L
1
and 84.1% in L
2
. These results
confirm that our method can substantially reduce the
amount of communication for privacy-protected per-
son re-identification using homomorphic encryption.
4.4 Evaluations on the MARS Dataset
4.4.1 Conditions of Image Acquisition
We also evaluated our method on the publicly avail-
able MARS dataset. Figure 12 shows examples of
pedestrian images contained in the MARS dataset.
This dataset includes people walking freely in an out-
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification
43

door plaza, but it can be assumed that the pedestrian
traffic line is constant. We used the image sets of
camera clients C1 and C2. These sets contain only
the pedestrian image sequences after detection and
tracking. Because the tracking results of some image
sequences are often interrupted, we used only those
containing more than 20 pedestrian images in one se-
quence. We evaluated the accuracy of 4,540 pedes-
trian images for 41 subjects of C1 and 3,948 pedes-
trian images for 40 subjects of C2. We searched for
persons walking in the same direction in the field of
view of cameras C1 or C2 at different times.
(a) C1
(b) C2
Figure 12: Examples of pedestrian images contained in the
MARS dataset.
4.4.2 Evaluation Results
Figure 13 shows reference leg postures generated us-
ing the projection matrix of the MARS dataset. Be-
cause of the different heights and angles of cameras
C1 and C2, different respective perspective projection
matrices were applied. The reference posture shown
in (a) was used in the evaluation of C1 and the refer-
ence leg posture shown in (b) was used in the evalua-
tion of C2.
Figure 14 shows the accuracy of person re-
identification on the MARS dataset. We see that the
accuracies of our method using image selection with
reference leg postures P
2
and P
4
were better than that
of the baseline method without image selection. Fig-
ure 15 shows the reduction rate of pedestrian images
in the MARS dataset. If image selection is not applied
(the baseline method), the reduction rate was 0%, and
all pedestrian images were used. The reduction rates
of P
2
and P
4
were higher than those of P
1
and P
3
.
We see that reference postures P
2
and P
4
, which had
both good reduction rates and person re-identification
accuracy, were suitable for the camera settings of
the MARS dataset. These results confirm that our
method can reduce the number of pedestrian images
in the MARS dataset while maintaining the accuracy
of privacy-protected person re-identification.
𝑃
1
𝑃
2
𝑃
3
𝑃
4
𝑃
1
𝑃
2
𝑃
3
𝑃
4
(a) C1
(b) C2
Figure 13: Reference leg postures generated using the pro-
jection matrix of the MARS dataset.
40
50
60
70
80
90
40
50
60
70
80
90
Accuracy (%)
Accuracy (%)
Baseline
𝑃
1
𝑃
2
𝑃
3
𝑃
4
(a) C1
(b) C2
Baseline
𝑃
1
𝑃
2
𝑃
3
𝑃
4
Figure 14: Accuracy of person re-identification on the
MARS dataset.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
44

0
10
20
30
40
50
60
Reduction rate (%)
Reduction rate
(%)
𝑃
1
𝑃
2
𝑃
3
𝑃
4
(a) C1
(b) C2
𝑃
1
𝑃
2
𝑃
3
𝑃
4
0
10
20
30
40
50
Figure 15: Reduction rate of pedestrian images in the
MARS dataset.
5 CONCLUSIONS
To reduce the amount of communication needed for
privacy-protected person re-identification, we pro-
posed a method for selecting appropriate pedestrian
images. In the proposed method, we focused on the
gait cycle of the leg posture as a cue for image se-
lection. We generated the reference leg postures from
the body joints distributed in each category of the gait
cycle. We incorporated the image selection into a
privacy-protected person re-identification system us-
ing homomorphic encryption and evaluated the ef-
fectiveness of our method on the TUP and MARS
datasets. We confirmed that the amount of communi-
cation could be substantially reduced while achieving
the same or better accuracy of person re-identification
using the reference leg postures for selecting appro-
priate pedestrian images. In future work, we intend
to develop a reference posture generation for the case
where the pedestrian traffic line is not constant as well
as when the height and angle of the camera are not
constant. We will expand our evaluations to investi-
gate the effectiveness of our method when the number
of cameras and number of people increase. We also
intend to combine our method with dimensional re-
duction, e.g., hashing and sparse coding.
ACKNOWLEDGEMENT
This work was partially supported by JSPS
KAKENHI under grant number JP17K00238,
JP18H04114, and JP20K11865.
REFERENCES
Almasawa, M. O., Elrefaei, L. A., and Moria, K. (2019). A
survey on deep learning-based person re-identification
systems. Journal of IEEE Access, 7:175228–175247.
Ambai, M., Kimura, T., and Sakai, C. (2015). Fast and ac-
curate object detection based on binary co-occurrence
features. Journal of IPSJ Transactions on Computer
Vision and Applications, 7:55–58.
Baltieri, D., Vezzani, R., and Cucchiara, R. (2010). 3d body
model construction and matching for real time people
re-identification. In Proceedings of Eurographics Ital-
ian Chapter Conference.
Bird, N. D., Masoud, O., Papanikolopoulos, N. P., and
Isaacs, A. (2005). Detection of loitering individuals in
public transportation areas. Journal of IEEE Transac-
tions on Intelligent Transportation Systems, 6(2):167–
177.
Bourdev, L., Maji, S., and Malik, J. (2011). Describing
people: A poselet-based approach to attribute classifi-
cation. In Proceedings of International Conference on
Computer Vision, pages 1543–1550.
Brakerski, Z., Gentry, C., and Vaikuntanathan, V. (2012).
Fully homomorphic encryption without bootstrap-
ping. In Proceedings of Innovations in Theoretical
Computer Science Conference, pages 309–325.
Cao, Z., Simon, T., Wei, S., and Sheikh, Y. (2017). Realtime
multi-person 2d pose estimation using part affinity
fields. In Proceedings of IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 1302–
1310.
Chang, L., Rod
´
es, I., M
´
endez, H., and del Toro, E. (2008).
Best-shot selection for video face recognition using
fpga. In Proceedings of Iberoamerican Congress on
Pattern Recognition, pages 543–550.
Chen, W., Wilson, J., Tyree, S., Weinberger, K., and Chen,
Y. (2015). Compressing neural networks with the
hashing trick. In Proceedings of International Con-
ference on Machine Learning, pages 2285–2294.
Dowlin, N., Gilad-Bachrach, R., Laine, K., Lauter, K.,
Naehrig, M., and Wernsing, J. (2016). Cryptonets:
applying neural networks to encrypted data with high
throughput and accuracy. In Proceedings of Interna-
tional Conference on Machine Learning, volume 48,
pages 201–210.
Fang, S., Wang, J., Yang, C., and Tong, P. (2020). Fast
retrieval method of image data based on learning
to hash. Journal of Physics: Conference Series,
1631:012029.
Farenzena, M., Bazzani, L., Perina, A., Murino, V., and
Cristani, M. (2010). Person re-identification by
symmetry-driven accumulation of local features. In
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification
45

Proceedings of IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
2360–2367.
Gong, S., Cristani, M., Yan, S., and Loy, C. C. (2014). Per-
son Re-Identification. Springer-Verlag London.
Gong, Y., Lazebnik, S., Gordo, A., and Perronnin, F.
(2013). Iterative quantization: A procrustean ap-
proach to learning binary codes for large-scale im-
age retrieval. Journal of IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 35(12):2916–
2929.
Han, J. and Bhanu, B. (2006). Individual recognition us-
ing gait energy image. Journal of IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
28(2):316–322.
Irie, G., Arai, H., and Tanigushi, Y. (2017). Multimodal
learning of geometry-preserving binary codes for se-
mantic image retrieval. Journal of IEICE Transactions
on Information and Systems, E100.D(4):600–609.
Kawanishi, Y., Deguchi, D., Ide, I., and Murase, H.
(2017). Trajectory ensemble: Multiple persons con-
sensus tracking across non-overlapping multiple cam-
eras over randomly dropped camera networks. In Pro-
ceedings of IEEE Conference on Computer Vision and
Pattern Recognition Workshops, pages 1471–1477.
Khan, F. M. and Br
´
emond, F. (2017). Multi-shot person re-
identification using part appearance mixture. In Pro-
ceedings of IEEE Winter Conference on Applications
of Computer Vision, pages 605–614.
Kobayashi, Y., Hobara, H., and Mochimaru, H. (2015). Aist
gait database 2015. https://www.airc.aist.go.jp/dhrt/
gait2015/index.html.
Layne, R., Hospedales, T. M., and Gong (2012). Person
re-identification by attributes. In Proceedings of the
British Machine Vision Conference, number 24, pages
1–11.
Leng, Q., Ye, M., and Tian, Q. (2020). A survey of open-
world person re-identification. Journal of IEEE Trans-
actions on Circuits and Systems for Video Technology,
30(4):1092–1108.
Li, X., Hu, W., Shen, C., Zhang, Z., Dick, A., and Hengel,
A. V. D. (2013). A survey of appearance models in vi-
sual object tracking. Journal of ACM Transactions on
Intelligent Systems and Technology, 4(4):58:1–58:48.
Lin, Y., Zheng, L., Zheng, Z., Wu, Y., Hu, Z., Yan, C., and
Yang, Y. (2019). Improving person re-identification
by attribute and identity learning. Journal of Pattern
Recognition, 95:151 – 161.
Lu, W., Kawasaki, S., and Sakuma, J. (2016). Using
fully homomorphic encryption for statistical analysis
of categorical, ordinal and numerical data. In Pro-
ceedings of Network and Distributed System Security
Symposium, pages 201–210.
Ma, X.-Q., Yu, C.-C., Chen, X.-X., and Zhou, L. (2019).
Large-scale person re-identification based on deep
hash learning. Journal of Entropy, 21(5):449.
Morita, K., Yoshimura, H., Nishiyama, M., and Iwai, Y.
(2018). Protecting personal information using homo-
morphic encryption for person re-identification. In
Proceedings of IEEE 7th Global Conference on Con-
sumer Electronics, pages 166–167.
Nakajima, C., Pontil, M., Heisele, B., and Poggio, T.
(2003). Full-body person recognition system. Journal
of Elsevier Pattern Recognition, 36(9):1997–2006.
Nishiyama, M., Nakano, S., Yotsumoto, T., Yoshimura,
H., Iwai, Y., and Sugahara, K. (2016). Person re-
identification using co-occurrence attributes of physi-
cal and adhered human characteristics. In Proceedings
of International Conference on Pattern Recognition,
pages 2085–2090.
Perry, J. and Burnfield, J. M. (2010). Gait Analysis: Normal
and Pathological Function. Slack Inc.
Qayyum, A., Malik, A., M Saad, N., and Mazher, M.
(2019). Designing deep cnn models based on sparse
coding for aerial imagery: a deep-features reduction
approach. Journal of Remote Sensing, 52(1):221–239.
Shi, Q., Petterson, J., Dror, G., Langford, J., Smola, A.,
Strehl, A., and Vishwanathan, S. V. N. (2009). Hash
kernels. In Proceedings of International Conference
on Artificial Intelligence and Statistics, volume 5,
pages 496–503.
Shu, G., Dehghan, A., Oreifej, O., Hand, E., and Shah, M.
(2012). Part-based multiple-person tracking with par-
tial occlusion handling. In Proceedings of IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1815–1821.
Ullah, A., Muhammad, K., Hussain, T., Baik, S. W., and
De Albuquerque, V. H. C. (2020). Event-oriented 3d
convolutional features selection and hash codes gen-
eration using pca for video retrieval. Journal of IEEE
Access, 8:196529–196540.
Wang, K., Wang, H., Liu, M., Xing, X., and Han, T.
(2018). Survey on person re-identification based on
deep learning. Journal of CAAI Transactions on Intel-
ligence Technology, 3(4):219–227.
Weinberger, K., Dasgupta, A., Attenberg, J., Langford, J.,
and Smola, A. (2009). Feature hashing for large scale
multitask learning. In Proceedings of Annual Interna-
tional Conference on Machine Learning, pages 1113–
1120.
Weinberger, K. Q. and Saul, L. K. (2009). Distance metric
learning for large margin nearest neighbor classifica-
tion. Journal of Machine Learning Research, 10:207–
244.
Wong, Y., Chen, S., Mau, S., Sanderson, C., and Lovell,
B. C. (2011). Patch-based probabilistic image qual-
ity assessment for face selection and improved video-
based face recognition. In Proceedings of IEEE Com-
puter Vision and Pattern Recognition, pages 74–81.
Wu, P., Liu, J., Li, M., Sun, Y., and Shen, F. (2020).
Fast sparse coding networks for anomaly detection in
videos. Journal of Pattern Recognition, 107:107515.
Ye, M., Shen, J., Lin, G., Xiang, T., Shao, L., and
Hoi, S. C. C. (2020). Deep learning for person
re-identification: A survey and outlook. CoRR,
abs/2001.04193.
Z. Yang, H. Ai, B. Wu, S. Lao, and L. Cai (2004). Face pose
estimation and its application in video shot selection.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
46

In Proceedings of the 17th International Conference
on Pattern Recognition, volume 1, pages 322–325.
Zang, M., Wen, D., Liu, T., Zou, H., and Liu, C. (2019).
A fast sparse coding method for image classification.
Journal of Applied Sciences, 9(3):505.
Zhang, N., Paluri, M., Ranzato, M., Darrell, T., and Bour-
dev, L. (2014). Panda: Pose aligned networks for
deep attribute modeling. In Proceedings of IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 1637–1644.
Zhao, Y., Shen, X., Jin, Z., Lu, H., and , Hua, X. (2019).
Attribute-driven feature disentangling and temporal
aggregation for video person re-identification. In Pro-
ceedings of IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition, pages 4908–4917.
Zheng, L., Bie, Z., Sun, Y., Wang, J., Su, C., Wang, S.,
and Tian, Q. (2016). Mars: A video benchmark for
large-scale person re-identification. In Proceedings of
Computer Vision and Pattern Recognition European
Conference on Computer Vision, pages 868–884.
Reduction in Communication via Image Selection for Homomorphic Encryption-based Privacy-protected Person Re-identification
47
