Real-time and Online Segmentation Multi-target Tracking
with Track Revival Re-identification
Martin Ahrnbom
1 a
, Mikael Nilsson
1 b
and H
˚
akan Ard
¨
o
2 c
1
Centre for Mathematical Sciences, Lund University, Lund, Sweden
2
Axis Communications AB, Lund, Sweden
Keywords:
Multi-target Tracking, Segmentation Tracking, Instance Segmentation, Real-time, Online Tracking.
Abstract:
The first online segmentation multi-target tracking algorithm with reported real-time speeds is presented.
Based on the popular and fast bounding box based tracker SORT, our method called SORTS is able to utilize
segmentations for tracking while keeping the real-time speeds. To handle occlusions, which neither SORT
nor SORTS do, we also present SORTS+RReID, an optional extension which uses ReID vectors to revive
lost tracks from SORTS to handle occlusions. Despite only computing ReID vectors for 6.9% of the detec-
tions, ID switches are decreased by 45%. We evaluate on the MOTS dataset and run at 54.5 and 36.4 FPS
for SORTS and SORT+RReID respectively, while keeping 78-79% of the sMOTSA of the current state of
the art, which runs at 0.3 FPS. Furthermore, we include an experiment using a faster instance segmentation
method to explore the feasibility of a complete real-time detection and tracking system. Code is available:
https://github.com/ahrnbom/sorts.
1 INTRODUCTION
Visual object tracking in videos is a key component in
modern Computer Vision research. The use of Convo-
lutional Neural Networks (CNN) for object detection
has led to a significant improvement in Tracking-by-
Detection approaches. Typically, objects’ locations
are represented by Axis-Aligned Bounding Boxes
(AABBs). For several applications, a more detailed
description of the position and pose of objects are
needed or useful, which has led to the use of seg-
mentation methods that localize objects on a pixel
level. Segmentation has typically been limited to
single-image tasks, but recently segmentation track-
ing, where objects are tracked in videos with pixel-
level localization, has begun to receive attention in
the Computer Vision community. In particular, the
CVPR 2020 MOTS Challenge (Voigtlaender et al.,
2019) drew attention to this research field. This pa-
per addresses the problem of segmentation tracking,
specifically.
The MOTS dataset (Voigtlaender et al., 2019) is
a recent and high quality dataset for comparing seg-
a
https://orcid.org/0000-0001-9010-7175
b
https://orcid.org/0000-0003-1712-8345
c
https://orcid.org/0000-0001-6214-3662
0 10 20 30 40 50 60
40
45
50
55
60
65
70
75
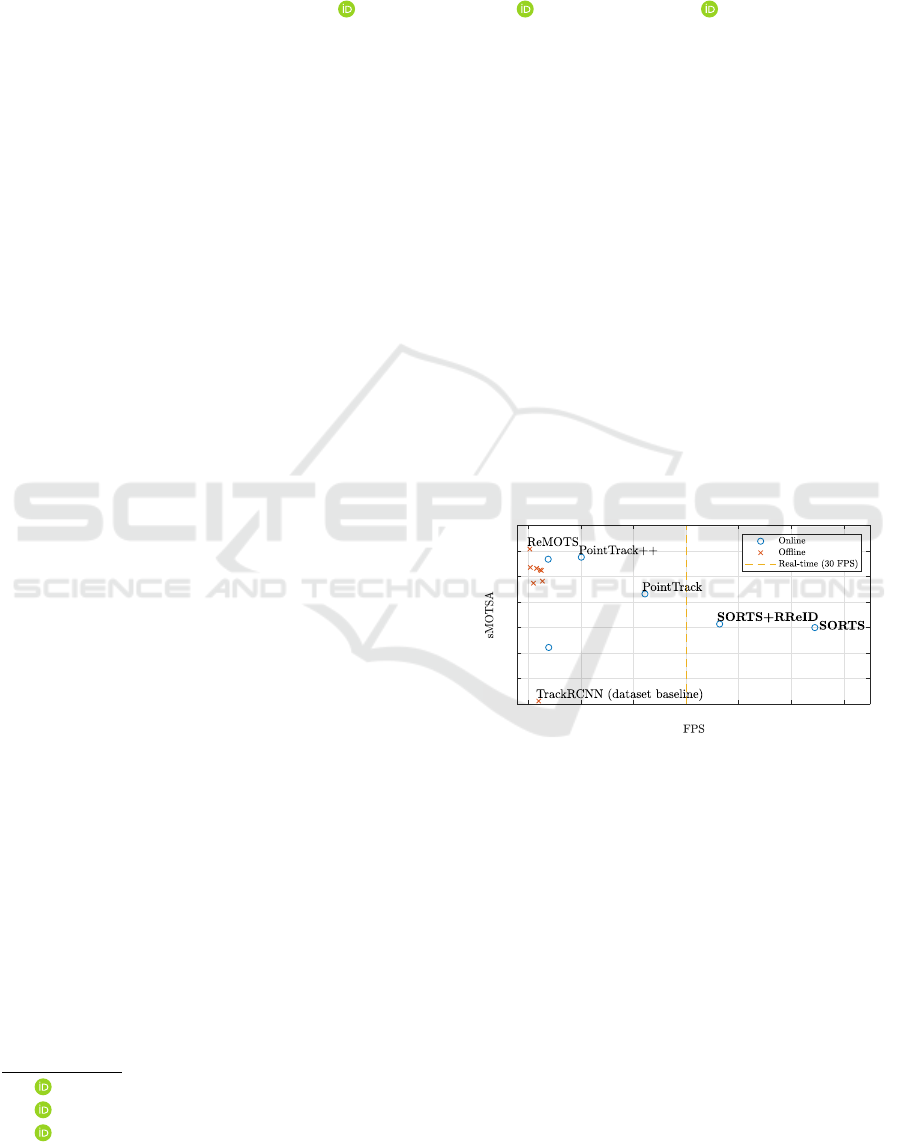
Figure 1: sMOTSA and FPS of all methods tested on the
MOTS dataset, including the CVPR 2020 MOTS Chal-
lenge. Some highlighted methods are named. All frame
rates are reported by the authors. Our methods, in bold,
run faster than all other methods, while performing about
78-79% of the state of the art in terms of sMOTSA.
mentation tracking results. For the currently tested
methods, the fastest one runs at 10 Frames Per Sec-
ond (FPS), while the rest are slower than 4 FPS.
This makes them poorly suited for real-time appli-
cations. We introduce the first, to the best of our
knowledge, online segmentation multi-target tracking
method with reported real-time speeds. Based on the
AABB tracker called Simple, Online and Real-Time
Tracker (SORT) (Bewley et al., 2016), we introduce
the Simple, Online and Real-Time Tracker with Seg-
mentations (SORTS). We extend SORT by using a
Ahrnbom, M., Nilsson, M. and Ardö, H.
Real-time and Online Segmentation Multi-target Tracking with Track Revival Re-identification.
DOI: 10.5220/0010190907770784
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
777-784
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
777

Instance
Segmentation
and AABBs by
Mask R-CNN
SORTS
Output
Segmentation
Tracks
Mask IOU new
detections against
existing tracks
Hungarian
association
Destroy tracks
RReID
Create new tracks
Compute ReID vector
and store
Compare ReID,
revive track ID
upon match
Predict new masks for
existing tracks
with Kalman Filter
Red box: old AABB detection
Green box: Kalman predicted AABB
Red mask: Old mask
Green mask: New predicted mask from AABB motion
Green: Predicted mask
Blue: New frame's mask
IOU is computed over pixels
Figure 2: Overview of SORTS and the optional RReID logic (dashed arrows). Existing tracks are updated by a Kalman Filter,
and these changes are applied to existing masks. Then, a Mask IOU is used to compare existing tracks with the new detections,
and Hungarian association matches them. Tracks that have not been updated for some time are destroyed, and new tracks are
started for detections that do have no match. With the optional RReID extension, ReID vectors are computed for destroyed
tracks that meet some criteria. When new tracks are created, their ReID vectors are checked against the ReID vectors, and if
a match is found, they revive the ID of the previous track. Best viewed in color.
mix of AABB and segmentation logic, to keep the ex-
ecution speed high while utilizing segmentations for
more robust matching of detections.
Because the MOTS dataset does not come with
publicly available segmentation detections, we use the
popular Detectron2 framework (Wu et al., 2019) and
its implementation of Mask R-CNN (He et al., 2017)
as a strong baseline for generating the per-frame seg-
mentation detections. SORTS is used for temporally
connecting those per-frame segmentations into tracks.
SORT does not handle occlusions, and neither
does SORTS, by default. To address this limitation,
we also introduce Revival Re-Identification (RReID),
an optional extension of our method where ReID vec-
tors, computed by a deep CNN, are used for this pur-
pose. By only computing ReID vectors at carefully
chosen times and locations, a high execution speed
can still be maintained, although it is significantly
slower than the default SORTS method. This is in
stark contrast to most segmentation tracking methods
that compute ReID vectors at every detection. Alter-
natively, one could consider SORTS to generate track-
lets, that are joined into tracks by the RReID logic.
Our main contributions are:
• We introduce the first online segmentation multi-
target tracking algorithm with reported real-time
speeds.
• We present an optional extension where ReID
vectors are used sparingly to handle occlusions
and improve accuracy at the cost of execution
speed, while still running above 30 FPS.
2 RELATED WORKS
2.1 Instance Segmentation
One of the most popular instance segmentation meth-
ods is Mask R-CNN (He et al., 2017). Based on Faster
R-CNN (Ren et al., 2015), the CNN is extended to
produce pixel-level segmentation masks for each de-
tected object. While not real-time, Mask R-CNN is
widely used for its accurate segmentation masks.
An example of real-time instance segmentation is
InstanceMotSeg (Mohamed et al., 2020). They ap-
ply segmentation to videos, using optical flow-like
motion features, but do not track instances. Their
method runs at 39 FPS. Another example is SEG-
YOLO (Wang, 2019) which runs at 17-30 FPS, and
performs about 5 mAP worse than Mask R-CNN.
YOLACT (Bolya et al., 2019) and CenterMask-
Lite (Lee and Park, 2020) are other examples of
fast instance segmentation networks. Fast methods
like these could be used as replacements for Mask
R-CNN; an example using CenterMask-Lite is pre-
sented in Section 4.7.
2.2 Segmentation Single-target
Tracking
These methods only track a single object, and its posi-
tion is typically given in the first frame. Segmentation
single-target tracking has received some attention, for
example a Siamese CNN that runs at 55 FPS (Wang
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
778

et al., 2019), and a method based on an Absorbing
Markov Chain model and runs at about 4 FPS (Yeo
et al., 2017).
2.3 AABB Multi-target Tracking with
Re-identification
AABB-based multi-target tracking is a wide research
field and some methods that are related to SORTS and
SORTS+RReID are presented here.
SORT
˜
sort is a popular and fast AABB-based
multi-target tracking method and several approaches
are based on it. One example is DeepSORT (Wo-
jke et al., 2017; Wojke and Bewley, 2018) which
extends SORT using a ReID network. Unlike
SORTS+RReID, they use the ReID network on ev-
ery detection on every frame, and this contributes to
their method being significantly slower, at around 20
FPS. DeepSORT reduced the number of ID switches
by 45% compared to SORT, which is the same effect
we get when comparing SORTS+RReID and SORTS,
indicating that our sparse use of ReID is likely suf-
ficient for this goal, although the numbers were ob-
tained on different datasets.
2.4 Segmentation Multi-target Tracking
A multi-target segmentation tracking method using
foreground-background segmentation alongside an
AABB-based detector (Milan et al., 2015) frames
tracking as a graph cut problem. Their solution is not
online, runs at 0.2 FPS and requires static cameras.
A method using a Markov Chain Monte-
Carlo approach combined with foreground segmen-
tation (Zhao et al., 2008) performs multi-target seg-
mentation tracking. The method is again limited to
scenes with static cameras, and it runs at about 2 FPS.
An example of early works in this field, a segmen-
tation tracking method that runs at 30 FPS, was pub-
lished in 2010 (Bibby and Reid, 2010). It requires
initial AABBs for the targets to be given, so it does
not contain logic for creating new tracks as objects
appear in the scene. In addition, it can only handle at
most 12 tracks at once, so it works more like a single-
target tracking algorithm applied on several objects at
once. We therefore do not consider this method to be
a true multi-target tracking algorithm.
On the CVPR 2020 MOTS Challenge (Voigtlaen-
der et al., 2019), the winner was ReMOTS (Yang
et al., 2020), which achieves an excellent sMOTSA
score, and runs at 0.3 FPS. This is also the only
method with published results on the MOTS dataset,
except for the baseline method (TrackRCNN). The
closest method to ours in terms of execution speed
is PointTrack and PointTrack++ (Xu et al., 2020) that
are online and run at 22 and 10 FPS respectively and
PointTrack++ won second place at the CVPR 2020
MOTS Challenge. No other competing method was
reported to run faster than 4 FPS.
There was another paper at the CVPR 2020
MOTS Challenge that share some ideas with our
method (Koeferl et al., 2020), where SORT was used
with some tricks to make it work with segmenta-
tions. They seem to have run SORT on AABBs
while simply outputting the segmentations associated
with each AABB. This is in stark contrast to our ap-
proach, where the segmentations themselves are used
for computing the Intersection Over Union (IOU).
They also do not report run time speeds, and their re-
sults do not appear on the MOT Challenge website.
In summary, to the best of our knowledge,
there has not been any previous online segmentation
multi-target tracking methods with reported real-time
speeds. Furthermore, in our framework, we introduce
a novel revival ReID approach.
3 OUR METHOD
3.1 SORTS
A basic overview of the method is shown in Figure 2.
The detector provides both AABBs and segmenta-
tion masks for each detection, which are the input to
SORTS. The algorithm extends SORT with the fol-
lowing changes:
• When computing IOU, which is done using seg-
mentations to get a pixel-level IOU score. The
segmentations are represented as binary maps,
NumPy (van der Walt et al., 2011) arrays of bool.
This allows both intersection and union to be
computed as fast binary operations. By cropping
the segmentation images based on their AABBs,
computations are only performed on the relevant
parts of the images. If the AABBs do not overlap,
this computation is skipped entirely.
• When the Kalman Filter predicts a new AABB, a
predicted segmentation is also created which will
then be used when computing IOU with incoming
frames. These predicted segmentations are sim-
ply the previous segmentation for that track, trans-
lated by the same translation as the center points
of the AABBs before and after the prediction. No
scaling or other modelling is done with the mask.
• When computing IOU, a part at the bottom of
each detection is removed. The amount of each
detection to be removed is defined by the constant
Real-time and Online Segmentation Multi-target Tracking with Track Revival Re-identification
779

y
cutoff
. The reasoning for this is that walking hu-
mans typically vary the shape of their legs more
quickly as they walk than the rest of their bodies.
• Tracks are not included in the output of SORTS
unless it has received detections for a number
of frames that correspond to A
min
seconds, ex-
cept for the first A
min
seconds of each sequence.
This removes many false and poor tracks typically
caused by incorrect detections by Mask R-CNN.
• Detections that are shorter in height than h
min
are
ignored as a preprocessing stage. This avoids un-
necessary computations about many tracks that
are in the do-not-care regions of the MOTS
dataset. The parameter h
min
is defined as a per-
centage of the total image height, to scale with
different video sizes.
3.2 SORTS+RReID
As an option, we implemented a fast method for using
ReID for handling occlusions. The method uses the
ReID network defined in (Luo et al., 2019; Luo et al.,
2019). In order to keep a high execution speed, ReID
vectors are only computed sparingly, on average on
only 6.9% of all track appearances.
Whenever a track is considered lost in the method
described in Section 3.1, before being discarded, a
few checks are performed. If fulfils any of the fol-
lowing conditions, the track is discarded as usual:
• The track is too short with fewer than R
short
sec-
onds.
• The track’s final position was close to the borders
of the image within R
border
%, except if the track
is near both the top and bottom of the screen,
in which case it is standing close to the camera
and should still be included. This prevents RReID
from being used on tracks that walk out of the im-
age.
• The height of the track’s final AABB is lower than
R
height
% of the image height.
Otherwise, a ReID vector is computed for that track.
First, a reasonable frame number is chosen, for which
the ReID vector will be computed. When SORTS is
running in RReID mode, each track stores R
memory
many previous masks, and if the number of stored
masks for the track is at least R
lookback
, then the
R
lookback
seconds old mask is used. Otherwise, what-
ever mask is stored in the middle of the track is used
instead, to avoid using the first and last frames where
it is more likely that the track is partially occluded.
Then, for the chosen frame, the corresponding
video frame is loaded into memory, using a cache in
case multiple tracks do this for a single frame, and the
cache hit-rate is about 40%. The section correspond-
ing to where the track was at that time is extracted
from the image, and fed into the ReID network. The
ReID network is used without its final pooling layer,
providing a spatial map of ReID vectors. The mask
that the track had at that time is shrunk by the same
factor as the spatial map, using nearest neighbour in-
terpolation. Finally, the average ReID vector corre-
sponding to those pixels that belong to the shrunk
mask is computed, and stored for the track. The tracks
with ReID vectors computed are stored in a list, where
they are kept for R
storage
seconds.
Then, whenever a track is about to get its ID as-
signed, after being associated to A
min
detections, it
has a chance to inherit the ID of a previous track, if
the ReID vectors match up. Before computing a ReID
vector for the track, a few checks are performed, and
if any of this conditions hold, the track is simply as-
signed a new ID and no ReID vector is computed:
• There are no previous tracks with computed ReID
vectors.
• The height of the track’s latest AABB is lower
than R
height
% of the image height.
• The track’s latest mask does not have any pixels
when shrunk.
Then, the ReID vector of the track is computed as be-
fore. The vector is compared to the ReID vectors in
the list, picking the one with the highest normalized
dot product, assuming it is above R
thresh
. If such a
match can be made, the track inherits the ID of the
matched previous track, and the old track is effec-
tively “revived”.
4 EXPERIMENTS
4.1 Instance Segmentation
For most of our experiments, we use Detec-
tron2’s (Wu et al., 2019) implementation of Mask
R-CNN 101 (He et al., 2017). Because the MOTS
dataset requires that each pixel belongs to at most
one object, a pixel-wise Non-Maximum Suppres-
sion (NMS) is implemented as a final stage of the
instance segmentation pipeline, similar to (Koeferl
et al., 2020). If a single pixel belongs to multiple de-
tections, it gets assigned to the one with the higher
confidence score. This operation runs on the GPU
at takes about 0.2 ms per image. The total execution
time of the instance segmentation step with this model
is about 8 FPS, for the batch size one.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
780

The detector was retrained on the MOTS dataset,
using pre-trained weights from the MS COCO
dataset (Lin et al., 2014) as a starting point. 4-fold
cross validation was used for early stopping, using the
four sequences as folds. Then, the detector was re-
trained for the found mean number of epochs, which
was 7500, on the entire training set. All other hyper-
parameters were chosen by hand waving, in particular
the learning rate (0.00025), batch size (2) and batch
size for the ROI heads (256).
4.2 Hyperparameter Optimization
SORTS has several parameters that are non-trivial to
tune. From SORT, it has inherited the Kalman Fil-
ter (Labbe, 2014) parameters R
2
, P
4
, P
scale
and Q
scale
,
as well as a few others:
• A
max
, the time in seconds without a new detec-
tion after which a track is considered finished, al-
though this parameter was measured in frames in
SORT
• I
thresh
, the minimum IOU for a match between
new detections and existing tracks
These, and the new y
cutoff
and A
min
parameters need
to be tuned. A random search was first applied where
parameters were picked randomly within hand-picked
ranges, and the performance was tested using a score
defined by
S = sMOTSA +
FPS
500
, (1)
where S is the score, sMOTSA is defined by the
MOTS dataset, and FPS is the execution speed (in
Hz).
The reason for including the FPS in the score is
that it was found that certain parameters lead to signif-
icantly lower frame rates and those parameters should
be avoided if other parameters give similar sMOTSA
scores.
The parameters found by random search are then
used as a starting point in a Nelder-Mead opti-
mization (Nelder and Mead, 1965; Gao and Han,
2012), optimizing over only the sMOTSA, as smaller
changes to the parameters seem to have little impact
on the frame rate. To prevent overfitting to the train-
ing dataset, only three of the four sequences were
used for these optimization strategies, with the fourth
(the sequence called ’09’) being used as a validation
set for early stopping.
For SORTS+RReID, the process was similar. The
parameters found in Section 3.1 were used as-is. The
new parameters R
thresh
, R
short
, R
border
, R
height
, R
memory
,
R
lookback
and R
storage
were optimized, first by random
testing over the score S, and then using Nelder-Mead,
Table 1: Final parameters for SORTS (left column) and
SORTS+RReID (left and right columns).
Parameter Value Parameter Value
R
2
0.171 R
thresh
0.897
P
4
3171.191 R
border
9.9%
P
scale
203.685 R
memory
1.739 s
Q
scale
0.0277 R
storage
1.723 s
A
min
0.131 s R
short
0.166 s
A
max
0.0487 s R
lookback
0.165 s
y
cutoff
35.0% R
height
7.40%
I
thresh
0.30
h
min
3.66%
optimizing over sMOTSA. Again, the ’09’ sequence
was used as a validation set for early stopping.
The optimal parameters found after optimization
can be seen in Table 1.
4.3 MOTS Evaluation
The primary experiment of this research was the eval-
uation of SORTS and SORTS+RReID on the MOTS
dataset.
A comparison between SORTS, SORTS+RReID
and all other methods with publicly available results
on MOTS or the CVPR 2020 MOTS Challenge, in
terms of sMOTSA and FPS, is shown in Figure 1. A
more detailed table of SORTS and SORTS+RReID
for the various metrics is shown in Table 2. Some
example output images from the test set can be seen
in Figure 5.
4.4 Ablation Study
In order to see the contribution of various aspects of
our method, we have evaluated variants of SORTS
and SORTS+RReID on the MOTS validation set, se-
quence ’09’, because test set evaluations are limited
on the MOTS dataset. Parameters are not re-trained in
the interest of time. When not training Mask R-CNN,
pretrained weights from the MS COCO dataset (Lin
et al., 2014) were used instead. The results of the ab-
lation study is presented in Table 3.
4.5 Resolution Dependence
A commonly used approach for creating a trade-off
between accuracy and execution speed is to run meth-
ods at different image resolutions. To measure this ef-
fect on our methods, the three 1080p sequences in the
MOTS training set were shrunk to several different
commonly used video resolutions. The test was then
redone on each resolution, including re-computing
the detections. Parameter optimization was skipped
Real-time and Online Segmentation Multi-target Tracking with Track Revival Re-identification
781

Table 2: Detailed metrics of SORTS and SORTS+RReID on the MOTS test set. The latter is an improvement or the same, in
all metrics except the frame rate. Most importantly, the number of ID switches was cut by 45%. Surprisingly, this has very
little impact on most metrics even though it can be important for applications.
sMOTSA IDF1 MOTSA MOTSP MODSA MT ML
SORTS 55.0 57.3 68.3 81.9 70.0 107 52
SORTS+RReID 55.8 65.8 69.1 81.9 70.0 107 52
TP FP FN Recall Precision ID Sw. Frag FPS
SORTS 23,671 1,076 8,598 73.4 95.7 552 577 54.5
SORTS+RReID 23,671 1,076 8598 73.4 95.7 304 576 36.4
Table 3: Ablation study results on the MOTS validation set (sequence “09”). The two rightmost columns are the final versions
of SORTS and SORTS+RReID, respectively. The leftmost column roughly corresponds to standard SORT.
Training Mask R-CNN
Mask IOU
y
cutoff
h
min
RReID
sMOTSA 63.9 64.5 65.6 65.7 65.7 66.4
FPS 61.4 78.8 48.6 46.5 47.5 40.5
30 40 50 60 70 80 90 100 110 120
63
64
65
66
67
68
69
480x848
480x848
720x1280
720x1280
1080x1920
1080x1920
Figure 3: sMOTSA and FPS of SORTS and
SORTS+RReID on the high-resolution subset of the
training set, downscaled to 720p and 480p. As the resolu-
tion decreases, it is possible to get a high execution speed,
at the cost of sMOTSA score.
in order to save time. The Mask R-CNN detector ran
at 8.2 FPS in 480p, 8.0 FPS in 720p and 7.6 FPS in
1080p. The results can be seen in Figure 3.
4.6 Execution Time Details
All experiments were performed with a Intel Core i7-
3930K CPU @ 3.20GHz × 12 CPU, and a Nvidia
GeForce GTX 1080 Ti GPU. As is common, not all
operations are included in the execution time. We ex-
clude the following, to be consistent with the recom-
mendations of the MOT Challenge (MOT Challenge,
2020):
• The detections
• Reading and writing to files, including images
• Run-length encoding and decoding of segmenta-
tion masks to and from text format
SORTS SORTS+RReID
0
10
20
30
40
50
60
70
80
Figure 4: Timing of various parts of SORTS (left) and
SORTS+RReID (right) on the test set. The presented times
are the average time per frame spent on each task. The “dot-
ted” sections are not included in the calculated FPS, as per
the recommendations of the MOT Challenge. Best viewed
in color.
We present the execution time of SORTS and
SORTS+RReID, divided into different segments for
different kinds of computations, in Figure 4.
4.7 Using CenterMask-Lite
For applications where the entire pipeline needs to
run in real-time, Mask R-CNN is too slow. For this
purpose, we also tested SORTS and SORTS+RReID
using CenterMask-Lite (Lee and Park, 2020), a re-
cent and fast instance segmentation method. With
our setup, it runs at 17.3 FPS. The difference in ex-
ecution speed between our setup and the reported 35
FPS could be explained by a combination of factors:
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
782

Figure 5: Examples of images from the MOTS test set, with segmentation tracks by SORTS+RReID. Images are taken 30
frames apart. Best viewed in color, preferably on a screen.
them using the more powerful Titan Xp GPU, per-
forming detections in batches and not using pixel-
wise NMS. Regardless, this is a step towards a true
real-time pipeline.
We tested both Mask R-CNN and CenterMask-
Lite on our validation set (sequence “09”), af-
ter training on the other three sequences from the
MOTS training set. We then ran both SORTS and
SORTS+RReID on these detections. Going from
Mask R-CNN to CenterMask-Lite, the sMOTSA on
the validation set dropped from 65.7 to 51.2 for
SORTS, and from 66.4 to 52.0 for SORTS+RReID.
The execution speed dropped too, to 35 FPS for
SORTS and 29 FPS for SORTS+RReID. We believe
this is due to CenterMask-Lite creating a larger num-
ber of detections, as CenterMask-Lite creates 38%
more detections on the MOTS training set than Mask
R-CNN, with the same confidence threshold (0.4).
While this threshold could be increased, doing so
would likely further reduce the tracking accuracy.
5 DISCUSSION
SORTS+RReID greatly improves upon SORTS by re-
ducing the number of ID switches, but this improve-
ment is not really reflected in the sMOTSA score,
which puts a large weight on the precise shape of the
tracked objects. This should be taken into consid-
eration for real applications, as consistent tracks are
sometimes more important than accurate segmenta-
tions. Looking at IDF1, which does not depend on the
precise shapes, the improvement of SORTS+RReID,
compared to SORTS, is more noticeable.
The experiment with CenterMask-Lite shows that
real-time instance segmentation is still not quite good
enough to compete with Mask R-CNN. But more re-
search will be made, and hopefully a real-time in-
stance segmentation network will soon perform simi-
larly to slower CNNs in terms of accuracy. When that
happens, SORTS and SORTS+RReID can be used
with it, as a drop-in replacement for Mask R-CNN.
We like to evaluate SORTS and SORTS+RReID
on other datasets and in other scenarios, to see how
well it works in practice for various applications. We
would also like to continue experimenting with faster
instance segmentation methods to build a true end-
to-end online real-time system. Such a system could
have important applications in autonomous driving,
robotics and smart city surveillance, for example.
6 CONCLUSION
We present SORTS, and its optional extension
SORTS+RReID, the first online multi-target seg-
mentation tracking methods with reported real-time
speeds of 54.5 and 36.4 FPS respectively. The
Real-time and Online Segmentation Multi-target Tracking with Track Revival Re-identification
783

sMOTSA scores for these methods were 55.0 and
55.8 on the MOTS test set, which is about 78-79%
of the current state of the art which runs at 0.3 FPS.
The RReID system is able to cut ID switches by
45% while only computing ReID vectors for about
7% of all track instances, which helps it stay real-
time despite the added workload of the ReID net-
work. We have further experimented with and dis-
cussed using faster detectors. We hope that SORTS
and SORTS+RReID can be a strong baseline for real-
time segmentation multi-target tracking in the future.
REFERENCES
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468.
Bibby, C. and Reid, I. (2010). Real-time tracking of multi-
ple occluding objects using level sets. In 2010 IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition, pages 1307–1314.
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019).
YOLACT: Real-time instance segmentation. In ICCV.
Gao, F. and Han, L. (2012). Implementing the nelder-mead
simplex algorithm with adaptive parameters. Compu-
tational Optimization and Applications, 51:259–277.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask R-CNN. In Proceedings of the IEEE interna-
tional conference on computer vision, pages 2961–
2969.
Koeferl, F., Link, J., and Eskofier, B. (2020). Application
of SORT on Multi-Object Tracking and Segmentation.
In 5th BMTT MOTChallenge Workshop: Multi-Object
Tracking and Segmentation.
Labbe, R. (2014). Kalman and bayesian fil-
ters in python. https://github.com/rlabbe/
Kalman-and-Bayesian-Filters-in-Python.
Lee, Y. and Park, J. (2020). Centermask: Real-time anchor-
free instance segmentation.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, Arxiv: 1405.0312.
Luo, H., Gu, Y., Liao, X., Lai, S., and Jiang, W. (2019).
Bag of tricks and a strong baseline for deep person re-
identification. In The IEEE Conference on Computer
Vision and Pattern Recognition (CVPR) Workshops.
Luo, H., Jiang, W., Gu, Y., Liu, F., Liao, X., Lai, S., and
Gu, J. (2019). A strong baseline and batch normal-
ization neck for deep person re-identification. IEEE
Transactions on Multimedia, pages 1–1.
Milan, A., Leal-Taixe, L., Schindler, K., and Reid, I. (2015).
Joint tracking and segmentation of multiple targets. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Mohamed, E., Ewaisha, M., Siam, M., Rashed, H., Yoga-
mani, S. K., and Sallab, A. E. (2020). Instancemot-
seg: Real-time instance motion segmentation for au-
tonomous driving. CoRR, abs/2008.07008.
Nelder, J. A. and Mead, R. (1965). A simplex method
for function minimization. Computer Journal, 7:308–
313.
MOT Challenge (2020). Mot challenge website. https://
motchallenge.net/user account.php. Accessed 2020-
09-02.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: towards real-time object detection with re-
gion proposal networks. CoRR, abs/1506.01497.
van der Walt, S., Colbert, S. C., and Varoquaux, G. (2011).
The NumPy Array: A structure for efficient numeri-
cal computation. Computing in Science Engineering,
13(2):22–30.
Voigtlaender, P., Krause, M., Osep, A., Luiten, J.,
Sekar, B. B. G., Geiger, A., and Leibe, B. (2019).
MOTS: Multi-Object Tracking and Segmentation.
arXiv:1902.03604[cs]. arXiv: 1902.03604.
Wang, Q., Zhang, L., Bertinetto, L., Hu, W., and Torr,
P. H. (2019). Fast online object tracking and segmen-
tation: A unifying approach. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Wang, Z. (2019). SEG-YOLO: Real-Time Instance Segmen-
tation Using YOLOv3 and Fully Convolutional Net-
work. PhD thesis.
Wojke, N. and Bewley, A. (2018). Deep cosine metric learn-
ing for person re-identification. In 2018 IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 748–756. IEEE.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing (ICIP), pages 3645–3649. IEEE.
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y., and Gir-
shick, R. (2019). Detectron2. https://github.com/
facebookresearch/detectron2.
Xu, Z., Zhang, W., Tan, X., Yang, W., Su, X., Yuan, Y.,
Zhang, H., Wen, S., Ding, E., and Huang, L. (2020).
Pointtrack++ for effective online multi-object tracking
and segmentation. In CVPR Workshops.
Yang, F., Chang, X., Dang, C., Zheng, Z., Sakti, S.,
Nakamura, S., and Wu, Y. (2020). ReMOTS: Self-
supervised refining multi-object tracking and segmen-
tation.
Yeo, D., Son, J., Han, B., and Hee Han, J. (2017).
Superpixel-based tracking-by-segmentation using
markov chains. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition
(CVPR).
Zhao, T., Nevatia, R., and Wu, B. (2008). Segmentation
and tracking of multiple humans in crowded environ-
ments. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 30(7):1198–1211.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
784
