
Weakly-supervised Human-object Interaction Detection
Masaki Sugimoto
1 a
, Ryosuke Furuta
2 b
and Yukinobu Taniguchi
1 c
1
Department of Information and Computer Technology, Tokyo University of Science, Tokyo, Japan
2
Institute of Industrial Science, The University of Tokyo, Tokyo, Japan
Keywords:
Weakly-supervised Learning, Human-Object Interaction, Object Detection.
Abstract:
Human-Object Interaction detection is the image recognition task of detecting pairs (a person and an object)
in an image and estimating the relationships between them, such as “holding” or “riding”. Existing methods
based on supervised learning require a lot of effort to create training data because they need the supervision
provided as Bounding Boxes (BBs) of people and objects and verb labels that represent the relationships. In
this paper, we extend Proposal Cluster Learning (PCL), a weakly-supervised object detection method, for a
new task called weakly-supervised human-object interaction detection, where only the verb labels are assigned
to the entire images (i.e., no BBs are given) during the training. Experiments show that the proposed method
can successfully learn to detect the BBs of people and objects and the verb labels between them without
instance-level supervision.
1 INTRODUCTION
Human-Object Interaction detection (HOI detection)
is a task to detect the pairs of a person and an object
with their Bounding Boxes (BBs) in the input image
and to estimate the relationships between them, such
as “holding” and “riding”. HOI detection can provide
more detailed scene understanding than conventional
object detection. The detection results are utilized for
enhancing a variety of applications such as automatic
caption generation, person identification, and surveil-
lance camera systems. Unfortunately, existing HOI
detection methods based on supervised learning re-
quire excessive amounts of labor and time to create
the training data needed (Gupta and Malik, 2015).
In order to reduce the effort of creating training
data, a number of weakly-supervised learning meth-
ods have been proposed for object detection (Bilen
and Vedaldi, 2016; Tang et al., 2017; Wan et al.,
2018; Tang et al., 2018). They are trained to de-
tect instance BBs from image-level labels that repre-
sent which classes exist in the image; in other words,
their training does not require instance-level BB an-
notations. (Bearman et al., 2016) showed that it takes
10 seconds per instance to annotate the BB of an ob-
ject while it takes only 1 second per class to anno-
a
https://orcid.org/0000-0001-9315-3804
b
https://orcid.org/0000-0003-1441-889X
c
https://orcid.org/0000-0003-3290-1041
tate which class is included in the image. However,
for HOI detection, although many supervised learning
methods have been proposed that learn from a set of
BBs and verb labels that represent their relationships,
none can be trained using a set of just verb labels as-
signed to the entire set of images.
Therefore, in this paper, we tackle the new task
of weakly-supervised HOI detection, where only la-
bels of person-object relationships (verb labels) are
assigned to the images, and no BBs are given for train-
ing (Figure 1). To the best of our knowledge, this
is the first attempt to tackle weakly-supervised learn-
ing for HOI detection. We propose to extend Pro-
posal Cluster Learning (PCL) (Tang et al., 2018), a
weakly-supervised object detection method, to real-
ize weakly-supervised HOI detection. The original
PCL extracts a feature vector of each object candi-
date region by ROI pooling (Ren et al., 2015) and cal-
culates its detection score through a subsequent net-
work. In the proposed method, we obtain person re-
gions in advance (e.g., by using an off-the-shelf hu-
man detector) and calculate the detection score for
each pair of a person and an object candidate by
adding their feature vectors. In the experiments on
the V-COCO dataset (Gupta and Malik, 2015), the
proposed method achieves CorLoc of 10.7% on the
trainval set and mAP of 7.08% on the test set.
Sugimoto, M., Furuta, R. and Taniguchi, Y.
Weakly-supervised Human-object Interaction Detection.
DOI: 10.5220/0010196802930300
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
293-300
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
293

CNN
CNN
Training
Inference
eat obj
eat obj
Human
Object
Figure 1: Overview of weakly-supervised human object in-
teraction detection.
2 RELATED WORKS
In this section, we summarize weakly-supervised ob-
ject detection methods and supervised HOI detection
methods related to our work because there are no
weakly-supervised HOI detection methods.
2.1 Weakly Supervised Object Detection
Weakly-supervised object detection is a task to detect
instances by learning from image-level labels that rep-
resent which classes are included in the image, instead
of learning from BBs and class labels assigned to each
BB (instance-level labels). Weakly-supervised learn-
ing is expected to reduce the time and effort needed in
creating training data. There are two types of weakly-
supervised object detection methods; one is based on
the Multiple Instance Detection Network (Bilen and
Vedaldi, 2016) and the other is based on solving the
entropy minimization problem (Wan et al., 2018). We
focus on the former type here because the proposed
method is based on it.
Bilen et al. proposed the Multiple Instance Detec-
tion Network (MIDN) (Bilen and Vedaldi, 2016) as
the first example of weakly-supervised object detec-
tion. MIDN is able to learn object detection by pre-
dicting whether each class is present or not in the in-
put image. The prediction scores are calculated from
the scores normalized for each object candidate re-
gion and the ones normalized for each class. Tang et
al. proposed a method called Online Instance Classi-
fier Refinement (OICR) (Tang et al., 2017) based on
MIDN. OICR improves the accuracy of object detec-
tion by proposing an online training method that gen-
erates pseudo-ground truth BBs for each label. Tang
et al. improved its performance by a method called
Proposal Cluster Learning (PCL) (Tang et al., 2018),
which refines the pseudo-ground truth BB generation.
All of the above methods are tailored for object
detection. In this paper, we extend PCL to weakly-
supervised HOI detection.
2.2 Human Object Interaction Detection
HOI detection is an image recognition task proposed
by Gupta and Malik (Gupta and Malik, 2015). Typi-
cal HOI detection methods first detect human and ob-
ject areas in the regular way. After that, they predict
the relationships between people and objects (verb la-
bels). The purpose of HOI detection is to understand
a scene in detail.
Most HOI detection methods learn the appearance
features of the person and object regions and their
spatial relationships. Gupta and Malik (Gupta and
Malik, 2015) proposed an early method of HOI detec-
tion, which narrowed down the coordinates of the cor-
responding object region based on the verb label from
the person region. The final outputs are obtained by
combining the narrowed search range and the results
of object detection. (Gkioxari et al., 2018) proposed a
network based on Faster R-CNN, which predicts the
BBs of people and objects and the verb labels by con-
sidering their relations through utilizing an object de-
tection branch, human-centric branch, and interaction
branch. (Gao et al., 2018) proposed a network with
attention modules based on existing methods, where
the attention maps are generated from the entire fea-
ture maps. Recently, (Ulutan et al., 2020) proposed a
network that has a spatial attention branch and a graph
convolutional network to effectively consider contex-
tual information and explicitly model structural rela-
tions. This method outperforms the other state-of-the-
art methods by a large margin.
As mentioned above, various methods have been
proposed for HOI detection. However, all of them
are based on supervised learning, and there are no
weakly-supervised methods for HOI detection.
The work most relevant to ours is (Yang et al.,
2019). However, their problem setting is different
from ours in that their objective is to learn object de-
tection, not HOI detection, by using human keypoints
and action labels as strong cues.
3 PROPOSAL CLUSTER
LEARNING (PCL)
Because the proposed method is based on PCL (Tang
et al., 2018), we describe it in detail in this section.
PCL is a weakly-supervised object detection
method consisting of Multiple Instance Detection
Network (MIDN), Online Instance Classifier Refine-
ment (OICR), and Proposal Cluster Learning. Here-
after, we differentiate “PCL” from “PCL part”, where
the former refers to the entire method for weakly-
supervised object detection proposed by (Tang et al.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
294

2018), and the latter refers to the Proposal Cluster
Learning part of the former.
3.1 Learning
Here, we describe the training procedure of MIDN
and omit those of OICR part and PCL part because we
extend the MIDN part in PCL to weakly-supervised
HOI detection. Let C be the number of classes trained.
1. Extracting the Features of Candidate Region.
First, MCG (Arbel
´
aez et al., 2014) is used to gen-
erate R object candidate regions. For each can-
didate object region, VGG16 (Simonyan and Zis-
serman, 2015) and RoI Pooing (Ren et al., 2015)
are used to extract the 4,096-dim feature vector
f
f
f
r
(r = 1, ··· , R).
2. Concatenating Feature Vectors. Next, we trans-
form f
f
f
r
into a C-dim vector using a fully-
connected (fc) layer and create matrix X
X
X
a
∈ R
C×R
by concatenating the R vectors (r = 1, ·· · , R). In
the same manner, we create another matrix X
X
X
b
∈
R
C×R
using a different fc layer.
3. Normalizing each of X
X
X
a
and X
X
X
b
along Dif-
ferent Directions. Then, we normalize X
X
X
a
within each candidate region using softmax
function [σ
σ
σ(X
X
X
a
)]
cr
=
exp(X
a
cr
)
∑
C
c
0
=1
exp(X
a
c
0
r
)
. In con-
trast, we normalize X
X
X
b
within each class
[σ
σ
σ(X
X
X
b
)]
cr
=
exp(X
b
cr
)
∑
R
r
0
=1
exp(X
b
cr
0
)
.
4. Calculating the Object Candidate
Scores. We use the element-wise product
X
X
X
score
= σ
σ
σ(X
X
X
a
) σ
σ
σ(X
X
X
b
) in computing the object
candidate scores X
X
X
score
∈ R
C×R
. Each element
X
score
cr
(r = 1, ··· , R and c = 1, · ·· , C) represents
the prediction score of the r-th object candidate
region for the c-th class.
5. Calculating the Losses. By taking the sum
of the scores of all object candidate re-
gions, φ
c
=
∑
R
r=1
X
score
cr
, we can obtain the
probability φ
c
of the presence of class c
in the image. MIDN loss L
MIDN
b
is calcu-
lated between φ
φ
φ = [φ
1
, φ
2
, · ·· , φ
C
]
>
∈ R
C×1
and the image-level label supervision
y
y
y = [y
1
, y
2
, . . . , y
C
]
>
∈ R
C×1
, y
c
∈ {0, 1} by
the cross entropy loss function in Eq.(1).
L
MIDN
b
= −
C
∑
c=1
{y
c
logφ
c
+ (1 − y
c
)log (1 − φ
c
)}, (1)
where y
c
is the label that takes 1 if the c-th class
is included in the image, and 0 otherwise.
In addition to the training of MIDN described
above, we also train K refined classifiers on-
line. The k-th classifier (k = 1, · ·· , K) takes
f
f
f
r
(r = 1, ·· · , R) as input and outputs the refined
scores X
X
X
re f ine(k )
∈ R
(C+1)×R
through an fc layer,
where the (C + 1)-th class indicates the background
class. The k-th classifier is trained by minimizing the
refinement loss, L
re f ine(k )
, between the refined scores
and pseudo-ground truth BBs generated in the PCL
part (for details, see (Tang et al., 2018)).
3.2 Inference
At the time of inference, the final prediction score
for each object candidate region and each class
X
X
X
detect
∈ R
(C+1)×R
is calculated as the average of the
outputs of the K refined classifiers as in Eq.(2).
X
X
X
detect
=
1
K
K
∑
k=1
X
X
X
re f ine(k )
(2)
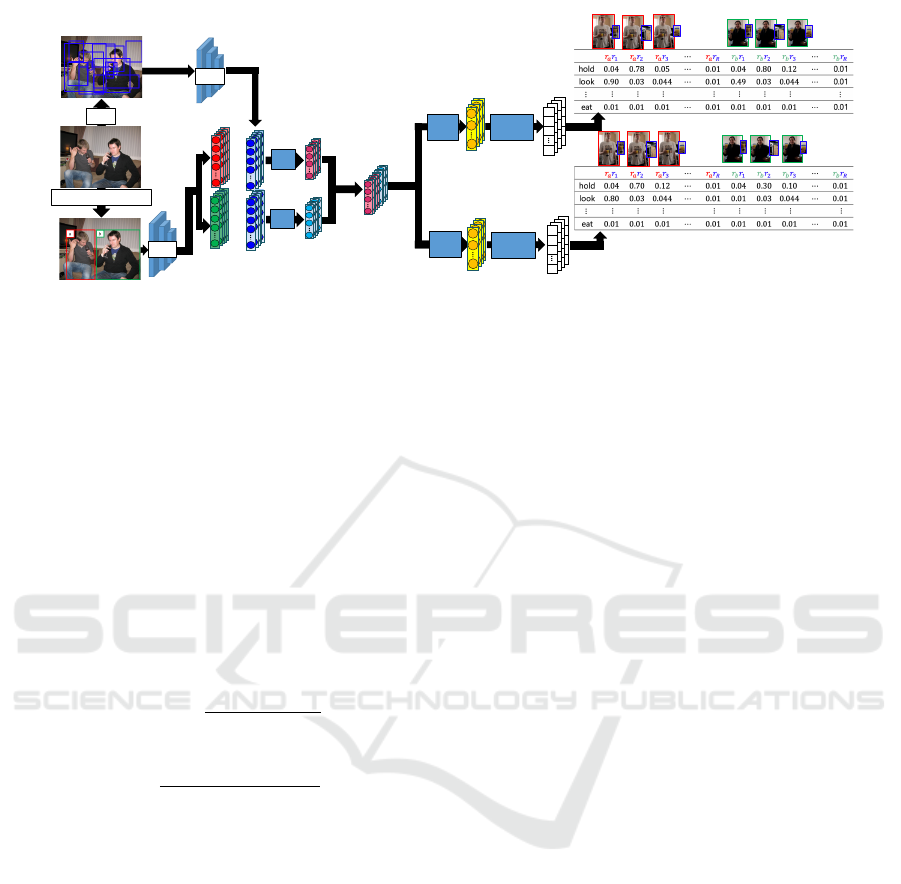
4 PROPOSED METHOD
In HOI detection, it is necessary to detect person-
object pairs and to predict the classes that represent
their relationships. In this paper, we extend the MIDN
part of PCL for HOI detection. An overview of the
proposed method is shown in Figure 2. The person
regions can be detected by employing an off-the-shelf
person detector. However, the experiments in Section
5 assume that all person regions have been detected
perfectly and use ground truth BBs as inputs to the
proposed method. In this section, we detail the train-
ing of the proposed method.
4.1 Learning
1. Extracting the Features of Candidate Region.
Object proposal generators such as MCG are used
to detect R candidate object regions. For each
candidate object region, VGG16 and RoI Pooling
are used to extract the 4, 096-dim feature vector
f
f
f
r
(r = 1, ·· · , R).
2. Extracting the Features of Human Region. For
each of the N human regions detected, VGG16
and RoI Pooling are used to extract the 4, 096-dim
feature vector g
g
g
n
(n = 1, ·· · , N) in the same way.
3. Adding the Feature Vectors. This is the key
point of the proposed extension of MIDN part to
HOI detection. To obtain feature vectors that rep-
resent a person-object pair, we add together the
feature vector f
f
f
r
of the r-th object candidate re-
gion and the feature vector g
g
g
n
of the n-th person
Weakly-supervised Human-object Interaction Detection
295
FC
Layer
FC
Layer
CNN
⨁
⨁
CNN
FC
Layer
SoftMax
Layer
𝝈(𝑿
!
)𝑿
!
(ℝ
"×$%
)
FC
Layer
SoftMax
Layer
𝝈(𝑿
&
)
𝑿
&
(ℝ
"×$%
)
MCG
Human Detection
(1)Extracting the feature
of candidate region
(2) Extracting the feature
of human region
(3) Adding the
feature vectors
(4) Concatenating the
feature vectors
Figure 2: Overview of proposed method.
region h
h
h
{r,n}
= f
f
f
r
+g
g
g
n
. Initially we tried concate-
nating the two vectors instead of adding them, but
this yielded lower performance than adding them.
The following flow is the same as 2-5 in Section 3.1.
4. Concatenating the Feature Vectors. Two types
of matrices X
X
X
a
, X
X
X
b
∈ R
C×RN
are created by trans-
forming h
h
h
{r,n}
into a C-dim vector through an fc
layer and concatenating the output vectors for all
the pairs of object candidate region (r = 1, ··· , R)
and person region (n = 1, · ·· , N).
5. Normalizing each of X
X
X
a
and X
X
X
b
along Dif-
ferent Directions. Then, we normalize X
X
X
a
within each candidate region using softmax func-
tion [σ
σ
σ(X
X
X
a
)]
c{r,n}
=
exp(X
a
c{r,n}
)
∑
C
c
0
=1
exp(X
a
c
0
{r,n}
)
. In con-
trast, we normalize X
X
X
b
within each class
[σ
σ
σ(X
X
X
b
)]
c{r,n}
=
exp(X
b
c{r,n}
)
∑
R
r
0
=1
∑
N
n
0
=1
exp(X
b
c{r
0
,n
0
}
)
.
6. Calculating the Object Candidate
Scores. We use the element-wise product
X
X
X
score
= σ
σ
σ(X
X
X
a
) σ
σ
σ(X
X
X
b
) in computing the object
candidate scores X
X
X
score
∈ R
C×RN
. Each element
X
X
X
score
c{r,n}
(r = 1, ·· · , R, c = 1, ·· · , C and n = 1, ··· , N)
represents the prediction score of each pair of a
person and an object candidate for the c-th class.
7. Calculating the Losses. By taking the sum of the
scores of all pairs, φ
c
=
∑
R
r=1
∑
N
n=1
X
score
c{r,n}
, we can
obtain the probability φ
c
of class c in the image.
We train the network to reduce the same loss func-
tion as in Eq.(1).
In addition to the training the proposed method
described above, we also train K refined classi-
fiers online. The k-th classifier (k = 1, ·· · , K)
takes h
h
h
{r,n}
as input and outputs the refined scores
X
X
X
re f ine(k )
∈ R
(C+1)×RN
through an fc layer, where the
(C + 1)-th class indicates the background class. The
k-th classifier is trained by minimizing the refinement
loss L
re f ine(k )
between the refined scores and pseudo-
ground truth BBs generated through the PCL part.
4.2 Inference
As in Section 3.2, at the time of inference, the fi-
nal prediction score for each pair and each class
X
X
X
detect
∈ R
(C+1)×RN
is calculated as the average of
the outputs from the K refined classifiers as in Eq.(2).
5 EXPERIMENTS SETTINGS
In this section, we describe the settings of the exper-
iments conducted to evaluate the performance of the
proposed method.
5.1 Dataset
V-COCO (Gupta and Malik, 2015) is one of the
datasets for HOI detection, and consists of 10,310 im-
ages from the COCO (Lin et al., 2014) dataset. A BB
is annotated to each person and each object. No cate-
gory names such as racket or skate-board are given to
the objects. If the person interacts with the object in
the image, one or more labels that represent their rela-
tionships are assigned to the pair of the person and the
object. Although the original V-COCO dataset has 26
different action labels (e.g., hold, hit, sit, and so on),
four labels (smile, stand, run, and walk) are gener-
ally not used for HOI detection because they do not
signify object interaction. The label (point) is also
not used because it rarely occurs in the dataset. Each
of three action labels (cut, eat, and hit) is divided
into two different verb labels (i.e., cut obj, cut instr,
eat obj, eat instr, hit obj, and hit instr) according to
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
296

Table 1: Labels used for weakly-supervised HOI detection.
eat obj drink talk on phone ride read
eat instr catch work on computer carry ski
throw skateboard cut obj hit instr hit obj
surf snowboard cut instr lay kick
whether the interaction is with an object or an instru-
ment. As a result, 24 verb labels are generally used
for HOI detection.
In this experiment, we additionally removed some
labels through the following process. We first re-
moved the labels assigned to the entire images, not
to the BBs of pairs of a person and an object. Second,
we removed the pairs of BBs that had more than one
verb labels because the proposed method for weakly-
supervised HOI detection aims to detect one verb la-
bel for each pair of a person and an object. We also
removed four labels (hold, look, jump, and sit) be-
cause they frequently co-occur with other labels in the
dataset. Finally, we removed the images that had no
labels. As a result, the number of classes (verb labels)
used in this paper was 20 (Table 1). The numbers of
images used for training and testing were 4, 287 and
3, 854, respectively.
5.2 Object Proposal Generation
In this paper, we used two types of methods to gen-
erate the object candidate regions: MCG and Faster
R-CNN. Section 6 reports the performance of the pro-
posed method when using each of them. We em-
ployed MCG because it does not need any supervision
and is widely used in weakly-supervised object detec-
tion. When we used MCG, the number of candidate
regions R was approximately 2, 000.
We also used Faster R-CNN trained on the COCO
dataset for object detection. It is important to note
that the BB and label annotations for HOI detection
were not used to train Faster R-CNN while those for
object detection were used. It is reasonable to use
the detector trained for object detection because the
datasets for object detection are easier to create or ob-
tain than those for HOI detection. When we used
Faster R-CNN, we set the number of candidate re-
gions R = 30. When the number of objects detected
by Faster R-CNN in an image was less than 30, we
randomly added the object candidate regions gener-
ated by MCG because R must be fixed when training
the proposed method.
5.3 Evaluation Metric
We used the trainval set for training. Similar to
weakly-supervised object detection, we report Cor-
Loc (Deselaers et al., 2012) on the trainval set and
mAP on the test set to evaluate the performance of
the proposed method. The predicted tuple (person
BB, object BB, and verb label) is counted to be true
when the following three conditions are satisfied: (i)
the verb label is correctly predicted, (ii) the intersec-
tion over union (IoU) between the detected object re-
gion and ground truth BB is more than threshold τ,
and (iii) IoU between the corresponding person re-
gion and ground truth BB is more than threshold τ.
We set τ = 0.5. Condition (iii) is always satisfied
in our experiments because we assumed that the per-
son regions were perfectly detected, i.e., we trained
and tested the proposed method and the compared
method (Ulutan et al., 2020) using the ground truth
person BBs.
5.4 Implementation Details
We implemented the proposed method on PyTorch.
We used the SGD optimizer to train it. The number
of iterations was set to 2.5 × 10
4
. We set the mini-
batch size of SGD to 1. We set the learning rate
to 5.0 × 10
−4
at the start of training and changed it
to 5.0 × 10
−5
in the last 1.0 × 10
4
iterations. The
momentum and weight decay were set to 0.9 and
5.0 × 10
−4
, respectively. In training the proposed
method, we first trained PCL using only the object
regions and verb labels (i.e., without person regions)
as an object detection task, see Section 3. Then, we
trained the proposed method as described in Section
4 using its weights as initial values. Due to the GPU
memory limitation, five detected persons were used as
input to the proposed method even if more than five
persons were detected in one image.
5.5 Baseline Method
We implemented a baseline method for the com-
parisons because there are no existing methods for
weakly-supervised HOI detection. In training the
baseline method, we trained PCL using only the ob-
ject regions and verb labels (i.e., without person re-
gions) as an object detection task, where the training
parameters were completely same as those in Section
5.4.
The inference procedure of the baseline method is
as follows. First, object regions are detected by the
trained PCL as an object detection task, where a verb
label is predicted for each detected object region. Sec-
ond, Euclidean distances between center coordinates
of every pair of a person and the detected object re-
gion are calculated. Finally, the output tuples (person
BB, object BB, and verb label) are obtained by choos-
ing the closest person region to each detected object
region.
Weakly-supervised Human-object Interaction Detection
297

6 RESULTS
6.1 Results on Trainval Set
Table 2 compares the CorLoc of the proposed method
with the baseline method for each verb label on the
trainval set. The third column in Table 2 shows the re-
sults when we used MCG to generate the object can-
didate regions. We observed that some labels such
as read, kick, and hit obj were successfully detected.
However, the proposed method did not work well for
other labels such as catch, throw, surf, and so on. Cor-
Loc averaged over all the verb labels (mean CorLoc)
was 10.7%. Figure 3 shows cases in which the pro-
posed method was successful. The yellow rectangles
and textbox indicate the predicted object regions and
labels, respectively. The dark blue rectangle shows
the ground truth object regions. The red line repre-
sents the person-object pairs, and the light blue rect-
angle shows the corresponding person regions. We
observed that the proposed method successfully de-
tected the corresponding object regions and verb la-
bels for the target persons.
The second column in Table 2 shows the results of
the baseline method, which pairs the detected object
regions and the closest person regions. The mean Cor-
Loc of the baseline method was 3.44%, significantly
lower than that of the proposed method. From the re-
sults, we observed that the proposed method success-
fully learned to detect HOI from appearance features.
The fourth column in Table 2 shows the results of
the proposed method when we used Faster R-CNN as
the object proposal generator. Compared with the re-
sults yielded with MCG, the performance was signifi-
cantly improved because the object candidate regions
generated by Faster R-CNN were much more accu-
rate than those generated by MCG. In particular, we
observed that some labels such as cut instr, hit instr,
and skateboard were successfully detected although
they were seldom detected by the proposed method
with MCG.
6.2 Results on Test Set
Figure 4 visualizes the successful cases of the pro-
posed method with MCG on the test set, and the
(a) kick
(b) cut obj (c) work on computer
Figure 3: Successful cases of the proposed method with
MCG on the trainval set.
Table 2: Comparisons of CorLoc on the trainval set.
verb Baseline Ours (MCG) Ours (Faster R-CNN)
read 0.332% 21.8% 58.4%
kick 0.00% 51.6% 87.0%
drink 0.00% 2.33% 33.6%
eat instr 0.00% 0.00% 7.20%
cut obj 2.17% 25.0% 44.2%
cut instr 0.00612% 0.00208% 20.4%
hit obj 0.00% 32.6% 69.2%
catch 0.00% 0.00221% 64.6%
throw 0.00% 0.00% 0.0253%
ride 11.3% 7.13% 4.13%
ski 0.0218% 0.00% 0.0236%
lay 49.28% 58.4% 57.0%
talk on phone 0.00% 0.123% 40.0%
hit instr 0.00% 0.00% 14.7%
snowboard 0.128% 0.00162% 0.178%
eat obj 0.0424% 0.466% 55.0%
work on computer 4.29% 15.2% 32.2%
carry 1.10% 0.216% 12.7%
skateboard 0.00165% 0.000488% 32.7%
surf 0.113% 0.00110% 0.188%
Average 3.44% 10.7% 31.7%
(b) drink
(a) kick
(c) lay
Figure 4: Successful cases of the proposed method with
MCG on the test set.
third column in Table 3 shows average precision (AP)
on the V-COCO test set. Similar to the results on
the trainval set (Table 2), we observed the proposed
method successfully detected some labels such as
read, kick and hit obj, but failed to detect other labels
such as catch, throw and surf.
The second column in Table 3 shows AP of the
baseline method. Similar to Table 2, the proposed
method which detects HOI based on appearance fea-
tures, achieved superior performance on the test set,
compared to the baseline based on distances between
object and person regions. The fourth column shows
the results of the proposed method with Faster R-
CNN. The mean of AP on all labels (mAP) was
29.6%. For comparison, in the last column of Table
3, we show the AP of VSGNet (Ulutan et al., 2020),
which is a state-of-the-art method for supervised HOI
detection. We ran the publicly available code of VS-
GNet
1
on the same trainval and test set. Although the
mAP of the proposed method with Faster R-CNN was
not as high as that of VSGNet, the proposed method
outperformed on some labels such as kick, cut obj,
and hit obj even though our method was trained with
weakly-supervised learning.
6.3 Discussions
Some failure cases of the proposed method with MCG
on the trainval set are shown in Figures 5, 6, and 7.
Figure 5 shows the examples where the regions pre-
1
https://github.com/ASMIftekhar/VSGNet
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
298

Table 3: Comparisons of AP on the test set.
verb Baseline Ours (MCG) Ours (Faster R-CNN) VSGNet
read 0.00% 3.28% 25.1% 55.1%
kick 0.00% 47.5% 95.3% 79.3%
drink 0.00% 2.65% 25.1% 48.5%
eat instr 0.00% 0.0368% 8.04% 30.5%
cut obj 0.784% 24.6% 45.6% 27.8%
cut instr 0.00717% 0.0115% 23.1% 33.9%
hit obj 0.00% 24.3% 83.3% 42.1%
catch 0.00% 0.172% 69.3% 12.8%
throw 0.00% 0.0126% 1.25% 59.1%
ride 11.0% 9.58% 4.03% 4.95%
ski 0.0189% 0.00257% 0.703% 4.73%
lay 47.8% 16.2% 21.6% 33.8%
talk on phone 0.00% 0.692% 39.7% 77.1%
hit instr 0.00% 0.106% 16.9% 72.4%
snowboard 0.204% 0.145% 1.61% 39.0%
eat obj 0.116% 1.10% 52.2% 61.7%
work on computer 5.32% 10.8% 31.5% 44.4%
carry 0.209% 0.363% 10.7% 9.59%
skateboard 0.00% 0.0129% 35.2% 57.3%
surf 0.0463% 0.0227% 2.75% 32.3%
Average 3.28% 7.08% 29.6% 41.3%
dicted by the proposed method were larger than the
ground truth regions. Figure 6 shows the cases where
the proposed method failed to detect extremely small
objects. Also, we found that the proposed method
with MCG frequently predicted extremely large BBs
(almost entire image) as shown in Figure 7. As shown
in Figure 8, we observed that many of these failure
cases were resolved by using Faster R-CNN instead
of MCG.
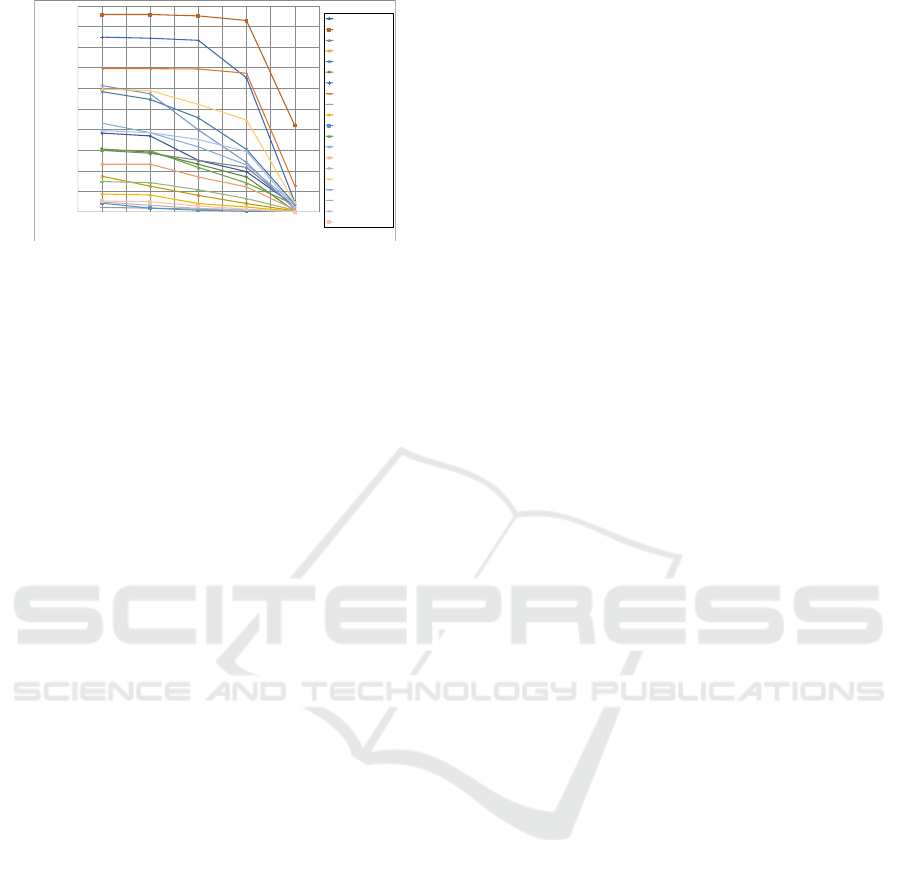
Figure 9 shows the AP of the proposed method
with MCG for each label as a function of the IoU
threshold τ. We observed that the performance hardly
changed on some labels such as cut instr, throw, and
hit instr because the proposed method rarely predicted
these labels. In contrast, AP increased for other labels
such as kick, cut obj, and hit obj when the threshold
was set lower than 0.5. This is because localization er-
rors on these labels were frequent while the proposed
method correctly predicted the labels.
Figure 10 plots AP versus IoU threshold τ on the
V-COCO test set when we used Faster R-CNN. AP
decreased for many types of labels as threshold τ in-
creased. From the results, we observed that using
Faster R-CNN yielded many localization errors rather
than label prediction errors, unlike MCG.
7 CONCLUSIONS
In this paper, we tackled weakly-supervised HOI de-
tection, where only image-level supervision (i.e., verb
labels) without BBs is used in training. We pro-
posed to extend PCL, which is a weakly-supervised
object detection method, to HOI detection. The pro-
posed method obtains a feature vector that represents
a person-object pair by adding the feature vector ex-
tracted for the person and the one for the object.
We conducted experiments on the V-COCO
dataset. The results showed that when we employed
MCG to generate the object candidate regions, the
(b) eat obj
(a) drink
(c) talk on phone
Figure 5: Examples of failure cases where BBs larger than
ground truth objects are predicted.
(a) kick
(b) drink (c) hit instr
Figure 6: Examples of failure cases where target persons or
objects are extremely small.
(a) snowboard
(b) throw
(c) catch
Figure 7: Examples of failure cases where predicted BBs
are extremely large.
(a) cut instr
Ours (MCG) Ours (Faster R-CNN)
Ours (MCG) Ours (Faster R-CNN)
(b) hit instr
Figure 8: Successful cases achieved by replacing MCG with
Faster R-CNN.
0.00%
10.00%
20.00%
30.00%
40.00%
50.00%
60.00%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
AP
IoU thres hhold
read
kick
drink
eat_instr
cut_obj
cut_instr
hit_obj
catch
throw
ride
ski
lay
talk_on_phone
hit_instr
snowboard
eat_obj
work_on_computer
carry
skateboard
surf
Figure 9: AP vs. IoU threshold on V-COCO test set (ours
with MCG).
proposed method achieved 10.7% and 7.08% in terms
of mean CorLoc and mAP, respectively. We also eval-
uated the performance when we used Faster R-CNN
for object candidate generation. The mean CorLoc
and mAP were significantly improved to 31.7% and
29.6%, respectively. Although BB supervision for ob-
ject detection was used to train Faster R-CNN, this is
a natural setting because datasets for object detection
Weakly-supervised Human-object Interaction Detection
299
0.0%
10.0%
20.0%
30.0%
40.0%
50.0%
60.0%
70.0%
80.0%
90.0%
100.0%
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
AP
IoU thres hhold
read
kick
drink
eat_instr
cut_obj
cut_instr
hit_obj
catch
throw
ride
ski
lay
talk_on_phone
hit_instr
snowboard
eat_obj
work_on_computer
carry
skateboard
surf
Figure 10: AP vs. IoU threshold on V-COCO test set (ours
with Faster R-CNN).
are more commonly available than those for HOI de-
tection. The proposed method with Faster R-CNN at-
tained better performance on some labels than a state-
of-the-art method for HOI detection based on super-
vised learning.
In future work, we will evaluate the performance
when we use the person regions detected by a per-
son detector as inputs to the proposed method because
we assumed in this study that the person regions were
perfectly detected. In order to improve performance,
it is also our future work to extend another part of
PCL such as pseudo-ground truth BB generation for
HOI detection because we extended only the MIDN
part in this paper.
ACKNOWLEDGEMENTS
This study was supported by JSPS KAKENHI Grant
Number JP17K06608 and JP20K12115.
REFERENCES
Arbel
´
aez, P., Pont-Tuset, J., Barron, J. T., Marques, F., and
Malik, J. (2014). Multiscale combinatorial grouping.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 328–335.
Bearman, A., Russakovsky, O., Ferrari, V., and Fei-Fei, L.
(2016). What’s the point: Semantic segmentation with
point supervision. In Proceedings of the European
Conference on Computer Vision, pages 549–565.
Bilen, H. and Vedaldi, A. (2016). Weakly supervised deep
detection networks. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2846–2854.
Deselaers, T., Alexe, B., and Ferrari, V. (2012). Weakly su-
pervised localization and learning with generic knowl-
edge. International Journal of Computer Vision,
100(3):275–293.
Gao, C., Zou, Y., and Huang, J.-B. (2018). ican: Instance-
centric attention network for human-object interaction
detection. In Proceedings of the British Machine Vi-
sion Conference.
Gkioxari, G., Girshick, R., Doll
´
ar, P., and He, K. (2018).
Detecting and recognizing human-object interactions.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 8359–8367.
Gupta, S. and Malik, J. (2015). Visual semantic role label-
ing. arXiv preprint arXiv:1505.04474.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Pro-
ceedings of European Conference on Computer Vi-
sion, pages 740–755.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. In Advances in Neural Informa-
tion Processing Systems, pages 91–99.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Tang, P., Wang, X., Bai, S., Shen, W., Bai, X., Liu, W.,
and Yuille, A. (2018). PCL: Proposal cluster learning
for weakly supervised object detection. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
42(1):176–191.
Tang, P., Wang, X., Bai, X., and Liu, W. (2017). Multiple
instance detection network with online instance clas-
sifier refinement. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2843–2851.
Ulutan, O., Iftekhar, A. S. M., and Manjunath, B. S. (2020).
VSGNet: Spatial attention network for detecting hu-
man object interactions using graph convolutions. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 13617–13626.
Wan, F., Wei, P., Jiao, J., Han, Z., and Ye, Q. (2018).
Min-entropy latent model for weakly supervised ob-
ject detection. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1297–1306.
Yang, Z., Mahajan, D., Ghadiyaram, D., Nevatia, R., and
Ramanathan, V. (2019). Activity driven weakly su-
pervised object detection. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 2917–2926.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
300
