
Graph Convolutional Networks Skeleton-based Action Recognition for
Continuous Data Stream: A Sliding Window Approach
Mickael Delamare
12 a
, Cyril Laville
1 b
, Adnane Cabani
2 c
and Houcine Chafouk
2 d
1
SIAtech SAS, 73 Rue Martainville, 76000 Rouen, France
2
Normandie Univ., UNIROUEN, ESIGELEC, IRSEEM, 76000 Rouen, France
Keywords:
Spatial-temporal Graph Convolutional Networks, Sliding Window, Action Recognition, Skeleton Data.
Abstract:
This paper introduces a novel deep learning-based approach to human action recognition. The method con-
sists of a Spatio-Temporal Graph Convolutional Network operating in real-time thanks to a sliding window
approach. The proposed architecture consists of a fixed window for training, validation, and test process
with a Spatio-Temporal-Graph Convolutional Network for skeleton-based action recognition. We evaluate our
architecture on two available datasets of common continuous stream action recognition, the Online Action
Detection dataset, and UOW Online Action 3D datasets. This method is utilized for temporal detection and
classification of the performed action recognition in real-time.
1 INTRODUCTION
Real-time human action recognition from skeleton
data streams is a central point in several applications
as it allows for seamless coordination between hu-
mans and machine and can be used to improve the
safety of the workplace by checking for falls or dan-
gerous situations (Ni et al., 2020). However, this is
a challenging task as the algorithm need to be able
to detect the start and end of each action without any
pauses between actions as well as differentiating be-
tween each action all in real-time (Li et al., 2016).
The most conventional approach to this problem con-
sists of two algorithms working together, one algo-
rithm detects when an action is being performed then
the other algorithm differentiates between all the dif-
ferent actions (Lara and Labrador, 2012), however,
this problem requires both algorithms to work in par-
allel increasing computational cost and lowering ac-
curacy overall. This method also relies on pauses be-
tween movements and was never tested on represen-
tative actions.
Online action recognition is quickly developed in
recent years. It aims to locate the action segment
with the partially observed action sequences, which
a
https://orcid.org/0000-0003-0119-2326
b
https://orcid.org/0000-0002-7871-843X
c
https://orcid.org/0000-0001-5948-8950
d
https://orcid.org/0000-0002-6683-0010
can be applied in real-time. Action detection algo-
rithms are divided into two sub-parts: off-line action
detection and on-line action detection. For off-line
action detection, in our article for us, segmented de-
tection is an offline training and then an online detec-
tion with this pre-training. Online action detection, in
our article, means the detection in real-time and for
our method, it is also the training phase using none
segmented data but continuous data stream. Most of
the works (Lei and Todorovic, 2018) (Nguyen et al.,
2018) only consider RGB images as the input because
RGB data directly reflect original information, like
human posture, object pose, etc. However, the RGB
input data always requires a huge amount of calcula-
tion, which is usually accelerated by GPU. Another
type of input is based on skeleton data, that requires
less amount of calculation and can be extracted from
video or directly provided by Inertial Measurement
Unit (IMU) (Polfreman, 2018) which is more conve-
nient for workers who might move a lot and end up
out of the field of vision of the camera.
However, for off-line action detection, future ac-
tion is still unavailable for practical use. We propose
another solution to this problem based on Spatial-
Temporal Graph Convolutional Network (ST-GCN)
(Yan et al., 2018), ST-GCN will be used to construct
a set of spatial-temporal graph convolutions on the
skeleton sequences and can capture motion informa-
tion in dynamic skeleton sequence that feet our aim to
detect action recognition in real-time. This ST-GCN
Delamare, M., Laville, C., Cabani, A. and Chafouk, H.
Graph Convolutional Networks Skeleton-based Action Recognition for Continuous Data Stream: A Sliding Window Approach.
DOI: 10.5220/0010234904270435
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
427-435
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
427

will operate in real-time thanks to a sliding window
approach which will allow us to recognize the actions
without having two algorithms to detect the beginning
and the end of action but to recognize each action in
real-time on a whole sequence.
We will test this approach on two datasets: UOW
OnlineAction 3D dataset (Tang et al., 2018) and the
OAD dataset (Li et al., 2016). Our contributions in
this paper are:
• A novel sliding windows ST-GCN based approach
for human action recognition.
• A showcases how effective this approach is com-
pared to the state of the art on two datasets: UOW
OnlineAction 3D dataset and Online Action De-
tection which uses representative challenging ac-
tions.
The rest of the paper is outlined as follows. Section 2
describes related works of motion action recognition.
The SW-GCN method is presented in Section 3, and
experimental results are shown in Section 4. The last
section concludes this paper.
2 RELATED WORK
The most common approaches to human action recog-
nition focus on classifying different actions on seg-
mented data streams (Mitra and Acharya, 2007),
where the classifier is provided with individual manu-
ally segmented actions and only has to identify which
action is being performed. Hidden Markov’s models
are often used for this purpose (Tao et al., 2012) but
they are slow and require a large dataset. However,
one major limitation of this approach is the fact that
to apply it in a real-time scenario another algorithm
is required to segment the data stream (Zhao et al.,
2013). The addition of another algorithm increases
the complexity of the system, adds another source of
potential errors, and is computationally expensive.
2.1 Segmented Action Recognition
Most of the existing approaches for skeletons based
action recognition model the spatial-temporal evolu-
tion of actions based on hand-crafted features. As a
kind of hierarchically adaptive filter bank, CNN per-
forms well in representation learning. An end-to-end
hierarchical architecture for skeletons based action
recognition with CNN has been proposed (Du et al.,
2015).
A fast and highly accurate action recognition sys-
tem based on Long Short Term Memory (LSTM) and
CNN that are trained to process input sequences of 3D
hand positions and velocities acquired from infrared
sensors for recognition of dynamic Hand actions has
been proposed (Naguri and Bunescu, 2017).
They showed Segmented motion action was re-
ally accurate for each segmentation, but in most of
the case they need at least two algorithms for continu-
ous stream action recognition and the accuracy is de-
graded due to online detection or segmentation. This
is why we focus on online motion action with one al-
gorithm.
2.2 Continuous Online Action
Recognition
A continuous Hidden Markov Model for online ac-
tion recognition based on vision has been introduced
(Eickeler et al., 1998). The system is able to rec-
ognize dynamic actions in person and background-
independent mode and works several times faster than
real-time. A method based on Hidden Markov Mod-
els (HMMs) presented for dynamic action trajectory
modeling and recognition has been proposed (Wang
et al., 2012). An online version of the expectation-
maximization (EM) algorithm for HMMs has been
presented (Mongillo and Deneve, 2008). The online
algorithm is able to deal with dynamic environments
when the statistics of the observed data is changing
with time. The HMM method is the first method used
for online action recognition.
An approach that dynamically adjusts the window
size and the shift at every step has been proposed (La-
guna et al., 2011). One limitation is instances depend
on the accuracy of the sensors. If sensors do not cap-
ture a significant change in the environment, the sys-
tem does not detect the state change and it does not
create the corresponding instance. It’s why we chose
to use a fixed window with skeleton data in our con-
text.
A method for real-time action recognition from a
noisy skeleton stream, such as those extracted from
Kinect depth sensors has been introduced (Miranda
et al., 2014). This method can improve the input of
GCN.
An online dynamic hand action recognition sys-
tem with an RGB-D camera, which can automatically
recognize hand actions against the complicated back-
ground is presented (Xu et al., 2015).
The authors (Molchanov et al., 2016) employ con-
nectionist temporal classification to train the network
to predict class labels from in-progress actions in un-
segmented input streams. This method provides an
Online detection and classification of dynamic hand
actions with recurrent 3d convolutional neural net-
works.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
428

A sliding window approach to data processing is
used (Luzhnica et al., 2016), their algorithm is suit-
able for stream data processing for natural hand action
recognition.
2.3 Survey on Spatial-temporal Graph
Convolutional Networks
The authors (Wu et al., 2020) provide a taxonomy that
groups neural networks of graphs into four categories:
neural networks of recurrent graphs, neural networks
of convolutional graphs, graphauto-coders, and neural
networks of space-time graphs.
The noisy skeleton-based action recognition
method based on convolutional graph networks with
predictive coding for latent space called predicatively
coded convolutional graph networks (PeGCN) is pre-
sented (Yu et al., 2020). It increases the flexibility
of the GCN and is better suited for action recog-
nition tasks using skeletal characteristics. This pa-
per also strengthens our choice by using skeleton
data. A novel Attention Enhanced Graph Convolu-
tional LSTM Network (AGC-LSTM) for human ac-
tion recognition from skeleton data is proposed (Si
et al., 2019). The proposed AGC-LSTM can not only
capture discriminative features in spatial configura-
tion and temporal dynamics but also explore the co-
occurrence relationship between spatial and temporal
domains. A novel two-stream adaptive graph convo-
lutional network (2s-AGCN) for skeleton-based ac-
tion recognition is presented (Shi et al., 2019) . This
data-driven approach increases the flexibility of the
graph convolutional network and is more suitable for
the action recognition task.
A novel model of dynamic skeletons called ST-
GCN is proposed (Yan et al., 2018), which moves be-
yond the limitations of previous methods by automat-
ically learning both the spatial and temporal patterns
from data. This formulation not only leads to greater
expressive power but also stronger generalization ca-
pability.
The ST-GCN for skeleton-based action recogni-
tion is extended by introducing two novel modules,
namely, the GraphVertex Feature Encoder (GVFE)
learns appropriate vertex features for action recogni-
tion by encoding raw skeleton data into a new fea-
ture space. And the Dilated Hierarchical Temporal
Convolutional Network (DH-TCN) is capable of cap-
turing both short-term and long-term temporal depen-
dencies using a hierarchical dilated convolutional net-
work (Papadopoulos et al., 2019). To capture richer
dependencies, (Li et al., 2019) introduce an encoder-
decoder structure, called A-link inference module, to
capture action-specific latent dependencies directly
from actions. They also extend the existing skeleton
graphs to represent higher-order dependencies. The
authors (Zheng et al., 2019) shows that the model
has high robustness and accuracy. BVH data is used
which are skeleton data, using the ST-GCN algorithm.
This paper shows that skeleton data and ST-GCN is
efficient and strengthen our choice using ST-GCN.
The Graph convolution network is a recent ap-
proach and shows its effectiveness as mentioned
above, to detect actions with skeleton data. We choose
this ST-GCN algorithm (Yan et al., 2018) to provide
action recognition with a sliding windows approach to
be able to detect motion action in real-time and only
focus on the sliding windows instead of improving
the ST-GCN. Other authors have improved this ST-
GCN such as (Li et al., 2019),(Papadopoulos et al.,
2019),(Zheng et al., 2019) or (Zheng et al., 2019)
2.4 Survey on Sliding Window
Approach
The authors (Laguna et al., 2011) used a different
approach using dynamic windows based on events.
Their approach dynamically adjusts the window size
and the shift at every step. Experiments with public
datasets show that their method, employing simpler
models, is able to accurately recognize the activities.
Overlapping sliding windows in Human action
Recognition (HAR) systems are associated with
underlying limitations of subject-dependent cross-
validation (CV). When a subject independent CV is
used, overlapping sliding windows do not improve the
performance of HAR systems but nevertheless require
substantially more resources than non-overlapping
windows (Dehghani et al., 2019). We choose over-
lapping sliding windows in our context to have more
data to characterize, and the algorithm can be updated
more frequently.
Determining the start time and end time of the ac-
tion increases the computation load, so the recogni-
tion results will be delayed (Ma et al., 2020). That’s
why we chose the sliding window method to recog-
nize the actions with their surrounding noise without
beginning and end recognized in our algorithm. This
would decrease the computation load and could be de-
ployed in an embedded system.
3 THE SW-GCN METHOD
3.1 A Sliding Window Approach
In the last decade, the theoretical study of the sliding
window model was developed to advance applications
Graph Convolutional Networks Skeleton-based Action Recognition for Continuous Data Stream: A Sliding Window Approach
429

with very large input and time-sensitive output. In
some practical situations, the input might be seen as
an ordered sequence, and it is useful to restrict com-
putations to recent portions of the input, (Datar et al.,
2002) introduced the sliding window model that as-
sumes that the in real-time. To validate our method,
on Figure 9 test was made, and on Figure 10, the
testing input is a stream of data elements and divides
the data elements into two categories: active elements
and expired elements. We denote the stream D by a
sequence of elements {P
i
}
m
i=1
where p
i
∈ N. It is im-
portant to note that m is incremented for each new
arrival. For a subset Z
j
of the state space, j ∈ 1, ..., r,
for all x ∈ Z j . The sets Z
1
, ..., Z
r
are called win-
dows, and we assume that Z
j
contains actions during
the time interval [t
j−1
, t
j
]. It is assumed that the size of
the window plays a crucial role in this method. This i
s why we choose a fixed window size that corresponds
to the size of an average action on each dataset. For
labeling, we take the middle frame to define the ac-
tion corresponding to the sliding window as shown
in Figure 1. This will allow the algorithm to charac-
terize the pieces of actions for each window with the
measurement noise induced by the other actions. The
space-time graph is built on the skeleton sequences in
two steps. First, the joints within a frame are con-
nected by edges according to the connectivity of the
human body structure. Then, each articulation will
be connected to the same articulation in the consecu-
tive frame. The connections in this configuration are
therefore naturally defined without the manual assign-
ment of parts. This also allows the network architec-
ture to work on data sets with a different amount of
articulation or joint connectivity (Yan et al., 2018).
Within the sliding window method combined with ST-
GCN, it can capture motion information in dynamic
skeleton sequences in real-time.
Our sliding window is fixed at the same size dur-
ing the training phase and the testing phase. The size
is determined by the average length of action for each
dataset shown in Figure 1. The offset of the sliding
window is one frame by one frame.
3.2 Spatial Temporal Graph
Convolutional Network
ST-GCN is a neural network that takes skeletal data
as an input and uses a Spatio-temporal kernel to de-
tect movements in the skeleton. This allows the net-
work to detect and classify different actions without
the need for a heavy algorithm.
This is why we decided to choose the Spatial-
Temporal Graph Convolutional Network to detect ac-
tion and characterize noise around the action using
Sliding Window
Skeletal
data stream
Training dataset
sample
sample
Labeled stream
Figure 1: Pre-processing of the Skeleton layout with each
joint used and Labeled Sliding window.
Figure 2: Skeleton layout with each joint used for both
dataset (25 joints).
the sliding windows. Only skeletal data were used be-
cause skeletal data can be obtained by inertial sensors
which are the cheapest on the market compared to
the camera or motion capture system. In our point of
view, in an industrial context, this is the best choice.
4 EXPERIMENTS
The proposed method is evaluated on two challeng-
ing datasets: the Online Action Detection dataset (Li
et al., 2016) and the UOW Online Action 3D dataset
(Tang et al., 2018) that have whole and unsegmented
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
430

Table 1: Result of UOW Online Action 3D action Compar-
ison between CNN and GCN.
Method Accuracy F1-score
SW-CNN
0.680 0.680
SW-GCN
0.755 0.750
online sequences. In all the datasets, multiple actions
are contained in sequences of videos with skeleton
data of which we only used the latter. The skeleton
layout with each joint used is organized as shown in
Figure 2. Both datasets using 25 joints so we used the
same input graph adjacency matrix for the ST-GCN.
We used the F1-score and accuracy to determine
a correct detection. A detection is correct when the
labeled frame in the middle of the sliding window
matches the prediction. We have not used SL-score
and El-score, our aim is to detect action without
knowing the start and end of an action.
4.1 Experiments on the UOW Online
Action 3D Dataset
The UOW Online Action 3D dataset (Tang et al.,
2018) contains 20 different actions, performed by 20
different subjects with up to 3-5 different executions.
From each of the 48 sequences, the 25 joint positions
per frame were used as inputs.
We choose this dataset instead of the MSR 3D ac-
tion dataset (Li et al., 2010) because it contains the
same actions but it has continuous sequences of ac-
tions which are our aim.
The UOW Online Action 3D dataset is recent and
does not propose a method similar to ours so we have
created a Sliding Windows based on Convolutional
Neural Network (SW-CNN). To compare with the
SW-GCN method. The SW-CNN was trained under
the ranger optimizer, which consists of two compo-
nents: Rectified Adam (RAdam) and Lookahead (Liu
et al., 2019b), for 200 epochs. And consists of four
convolution layers with 40 to 160 filters, as well as
2 max-pooling layers followed by a fully connected
layer of 100 neurons and the Mish activation function
(Misra, 2020). The loss function used was a weighted
cross-entropy loss function. This demonstrates the
efficiency of the GCN algorithm through the sliding
window which is the same as both methods. The SW-
GCN was trained under Stochastic gradient descent
for 140 epochs and consists of 11 layers with 32 to
128 filters and a reluctant linear activation function.
The loss function used was a weighted cross-entropy
loss function.
The data have been reorganized into windows of
50 frames as it is the average duration of all actions in
this dataset, with the method previously shown, then
each joint has been separated and the values have been
re-centered around zero, before being divided by three
to put them between -1 and 1. Finally, the data have
been separated into a training set of 46 sequences, a
validation set of 1 sequence, and a testing set of 1
sequence.
This dataset allows us to show the effectiveness
of our new approach. The SW-GCN has an F1-score
of 0.75 while the SW-CNN has 0.68 seen in the table
1. However, the SW-CNN is 10 times faster than our
method (1.63ms instead of 10ms) but using the CNN
can have a more false-positive prediction because in-
puts are just a simple matrix. Using the ST-GCN pro-
vides information on inputs as the skeleton matrix.
4.2 Experiments on the OAD Dataset
The OAD dataset (Li et al., 2016) contain long se-
quences corresponding to 700 action sequences with
ten action classes collected with Kinect v2. The data
have been reorganized into windows of 50 frames as
it is the average duration of all actions in this dataset,
with the method previously shown, then each joint has
been separated and the values have been re-centered
around zero, before being divided by three to put them
between -1 and 1. Finally, the data have been sepa-
rated into a training set of 46 sequences, a validation
set of 1 sequence, and a testing set of 1 sequence.
The ST-GCN was trained under Stochastic gradi-
ent descent for 140 epochs and consists of 11 layers
with 32 to 128 filters and a reluctant linear activa-
tion function. The loss function used was a weighted
cross-entropy loss function.
The authors (Liu et al., 2019a) obtained 0.82 over-
all accuracies, with our method we have better accu-
racy at 0.90 for online action detection overall. We
have better accuracy comparing the F1-score of each
action except for only one action (Drinking). This
can be explained by the fact that the action Drink-
ing is not well recognized by our method and cannot
be detected around the noise this is mostly due to the
window size. The action is too short compared to the
size of the window and is not recognized compared to
other actions that are longer.
4.3 Evaluation of Our Method
The measurements were realized on a laptop with
an i7-8750H processor and a GTX 1070. For
both datasets, we measured both inference time and
throughput of the network. Inference time was mea-
sured after a GPU warms up and was measured for
300 repetitions. The average inference time on the
UOW OnlineAction 3D Dataset was 10.1 ms and the
Graph Convolutional Networks Skeleton-based Action Recognition for Continuous Data Stream: A Sliding Window Approach
431
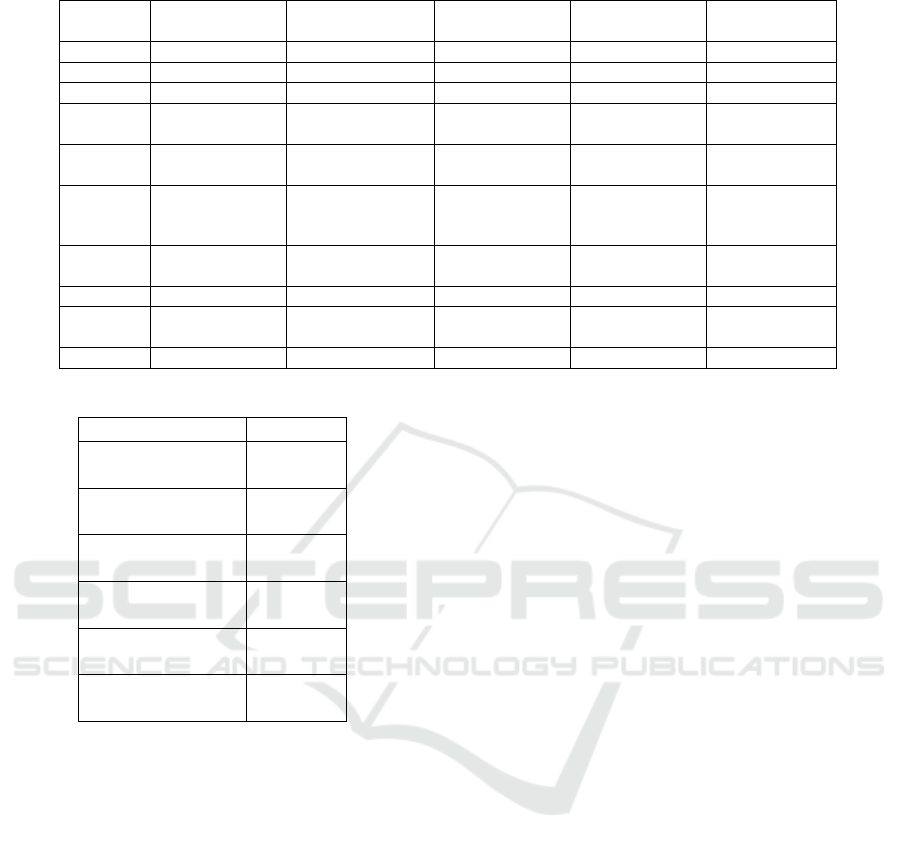
Table 2: Comparison on the OAD Dataset F1-Score for each class.
Actions
SVM-SW
(Li et al., 2016)
RNN-SW
(Zhu et al., 2016)
CA RNN
(Li et al., 2016)
JCR RNN
(Li et al., 2016)
SW-GCN
(Our method)
Drinking 0.15 0.44 0.58 0.57 0.09
Eating 0.47 0.55 0.56 0.52 0.84
Writing 0.65 0.86 0.75 0.82 0.92
Opening
cupboard
0.30 0.32 0.49 0.50 0.89
Washing
hands
0.56 0.67 0.67 0.71 0.78
Opening
Micro-
wave
0.60 0.67 0.47 0.70 0.78
Sweep-
ing
0.46 0.59 0.60 0.64 0.93
Gargling 0.44 0.55 0.58 0.62 0.95
Trowing
trash
0.55 0.674 0.43 0.46 0.88
Wiping 0.86 0.75 0.76 0.78 0.96
Table 3: Comparison on the OAD Dataset Accuracy overall.
Method
Accuracy
ST-LSTM
(Liu et al., 2017a)
0.77
AttentionNet
(Liu et al., 2017b)
0.75
JCR-RNN
(Li et al., 2016)
0.79
FSNet
(Liu et al., 2019a)
0.80
SSNet
(Liu et al., 2019a)
0.82
SW-GCN
(Our method)
0.90
average inference time on the Online Action Detec-
tion dataset was 11.2 ms. We do not use any data
augmentation when training models.
The throughput of the network was measured over
one second and was of 2544 repetitions for the UOW
OnlineAction 3D dataset and of 2515 repetitions for
the Online Action Detection dataset. The inference
time for both datasets is about 10 ms that is acceptable
for online action recognition in real-time.
We obtained good results with the OAD dataset in
online action recognition shown in Table 3 and Table
2. Our method has better result accuracy than the SW-
CNN of the UOW Online Action 3D dataset shown in
Table 1 which proves that our method can generalize
whole sequences of action recognition. The algorithm
is capable of characterized an action even if the action
is noisy.
To show the aim of our action recognition method,
the result of the validation is seen in Figure 3 for
OAD dataset and in Figure 4 that show the whole
predictions of the validation, sequence compare with
the ground truth sequence with 90% accuracy. It is
a graph of all detected actions in real-time. To vali-
date our method, on Figure 5 test sequence was made
and we had 91% accuracy. On Figure 6, the testing
phase that fit the ground truth sequence. The class list
is [0: No action, 1: Drinking, 2: Eating, 3: Writing,
4: Opening Cupboard, 5: Washing hand, 6: Open-
ing Microwave Oven, 7: Sweeping, 8: Gargling, 9:
Throwing trash, 10: Wiping].
For the UOW dataset, results of the validation are
seen in Figure 7 for OAD dataset and on Figure 8
that show the whole predictions of the validation se-
quence compare with the ground truth sequence with
75% accuracy. It is a graph of all detected actions in
real-time. To validate our method, on Figure 9 test
was made, and on Figure 10, the testing phase that
fit the ground truth sequence in green with 73% ac-
curacy. The class list is [0: No action, 1: High arm
wave, 2: Horizontal arm wave, 3: Hammer, 4: Hand
catch, 5: Forward punch, 6: High throw, 7: Draw X,
8: Draw tick, 9: Draw circle, 10: Hand clap, 11: Two
hands wave, 12: Side boxing, 13: Bend, 14: Forward
kick, 15: Sidekick, 16: Jogging, 17: Tennis swing,
18: Tennis serve, 19: Golf swing, 20: Pick up and
throw].
For both datasets, we have a good representa-
tion of continuous action recognition in real-time.
We also produced a video sequence to show in
real-time our SW-GCN solution. All the confu-
sion matrix are available in the Github repository
as well as the code to reproduce our method at :
https://github.com/DelamareMicka/SW-GCN.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
432

Figure 3: Predictions of SW-GCN method with validation
sequence in blue for OAD dataset with 90% accuracy.
Figure 5: Predictions of SW-GCN method with test se-
quence in blue for OAD dataset with 91% accuracy.
Figure 7: Predictions of SW-GCN method with validation
sequence in blue for UOW dataset with 75% accuracy.
Figure 9: Predictions of SW-GCN method with test se-
quence in blue for UOW dataset with 73% accuracy.
Figure 4: Predictions errors of SW-GCN method high-
lighted in red with validation sequence for OAD dataset. In
green the predictions that corresponds to the ground truth.
Figure 6: Predictions errors of SW-GCN method high-
lighted in red with validation sequence for OAD dataset. In
green the predictions that corresponds to the ground truth.
Figure 8: Predictions errors of SW-GCN method high-
lighted in red with validation sequence for UOW dataset. In
green the predictions that corresponds to the ground truth.
Figure 10: Predictions errors of SW-GCN method high-
lighted in red with test sequence for UOW dataset. In green
the predictions that corresponds to the ground truth.
Graph Convolutional Networks Skeleton-based Action Recognition for Continuous Data Stream: A Sliding Window Approach
433

5 CONCLUSION AND FUTURE
DIRECTIONS
In this paper, it has been shown that the sliding
window approach coupled with the Spatial-Temporal
Graph Convolutional Networks allows taking advan-
tage of it since the Graph convolutional Network uses
temporal information of the skeleton and can char-
acterize the noise around the action to determine the
right action in the sliding windows. We have shown a
sliding window is a good approach for online action
recognition in real-time with continuous data streams,
and it does not require a powerful processor like two
algorithms, one for data stream segmentation, a sec-
ond for action recognition. Our method provides only
one algorithm. And it can be embedded in a small
Electronic Control Unit (ECU) to provide a fast infer-
ence of the current action.
One of the limits is the size of the sliding and ef-
fective window when we know the average duration
of action. We validate our method with two states of
the art data sets with a common real-time motion ac-
tion and have shown a good performance.
Our future works will focus on a variable sliding
window that allows knowing several actions with dif-
ferent lengths. The main challenging is the amount
of data, the InHard dataset (Dallel et al., 2020) cor-
respond with the aim of action recognition in indus-
trial sites. But it needs much more data to generalized
action detection, it will be a part of our work to en-
large this dataset. Our method can also be improved
by using improved ST-GCN shown in the survey on
ST-GCN.
REFERENCES
Dallel, M., Havard, V., Baudry, D., and Savatier, X. (2020).
Inhard - an industrial human action recogniton dataset
in the context of industrial collaborative robotics. In
IEEE International Conference on Human-Machine
Systems ICHMS.
Datar, M., Gionis, A., Indyk, P., and Motwani, R. (2002).
Maintaining stream statistics over sliding windows.
SIAM journal on computing, 31(6):1794–1813.
Dehghani, A., Sarbishei, O., Glatard, T., and Shihab, E.
(2019). A quantitative comparison of overlapping
and non-overlapping sliding windows for human ac-
tivity recognition using inertial sensors. Sensors,
19(22):5026.
Du, Y., Fu, Y., and Wang, L. (2015). Skeleton based ac-
tion recognition with convolutional neural network. In
2015 3rd IAPR Asian Conference on Pattern Recogni-
tion (ACPR), pages 579–583. IEEE.
Eickeler, S., Kosmala, A., and Rigoll, G. (1998). Hidden
markov model based continuous online gesture recog-
nition. In Proceedings. Fourteenth International Con-
ference on Pattern Recognition (Cat. No. 98EX170),
volume 2, pages 1206–1208. IEEE.
Laguna, J. O., Olaya, A. G., and Borrajo, D. (2011). A
dynamic sliding window approach for activity recog-
nition. In International Conference on User Model-
ing, Adaptation, and Personalization, pages 219–230.
Springer.
Lara, O. D. and Labrador, M. A. (2012). A survey
on human activity recognition using wearable sen-
sors. IEEE communications surveys & tutorials,
15(3):1192–1209.
Lei, P. and Todorovic, S. (2018). Temporal deformable
residual networks for action segmentation in videos.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 6742–6751.
Li, M., Chen, S., Chen, X., Zhang, Y., Wang, Y., and
Tian, Q. (2019). Actional-structural graph convolu-
tional networks for skeleton-based action recognition.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 3595–3603.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3d points. In 2010 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition-Workshops, pages 9–14. IEEE.
Li, Y., Lan, C., Xing, J., Zeng, W., Yuan, C., and Liu, J.
(2016). Online human action detection using joint
classification-regression recurrent neural networks. In
European Conference on Computer Vision, pages
203–220. Springer.
Liu, J., Shahroudy, A., Wang, G., Duan, L.-Y., and Kot,
A. C. (2019a). Skeleton-based online action predic-
tion using scale selection network. IEEE transac-
tions on pattern analysis and machine intelligence,
42(6):1453–1467.
Liu, J., Shahroudy, A., Xu, D., Kot, A. C., and Wang,
G. (2017a). Skeleton-based action recognition using
spatio-temporal lstm network with trust gates. IEEE
transactions on pattern analysis and machine intelli-
gence, 40(12):3007–3021.
Liu, J., Wang, G., Hu, P., Duan, L.-Y., and Kot, A. C.
(2017b). Global context-aware attention lstm net-
works for 3d action recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1647–1656.
Liu, L., Jiang, H., He, P., Chen, W., Liu, X., Gao,
J., and Han, J. (2019b). On the variance of the
adaptive learning rate and beyond. arXiv preprint
arXiv:1908.03265.
Luzhnica, G., Simon, J., Lex, E., and Pammer, V. (2016).
A sliding window approach to natural hand gesture
recognition using a custom data glove. In 2016 IEEE
Symposium on 3D User Interfaces (3DUI), pages 81–
90. IEEE.
Ma, C., Li, W., Cao, J., Du, J., Li, Q., and Gravina, R.
(2020). Adaptive sliding window based activity recog-
nition for assisted livings. Information Fusion, 53:55–
65.
Miranda, L., Vieira, T., Mart
´
ınez, D., Lewiner, T., Vieira,
A. W., and Campos, M. F. (2014). Online gesture
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
434

recognition from pose kernel learning and decision
forests. Pattern Recognition Letters, 39:65–73.
Misra, D. (2020). Mish: A self regularized non-monotonic
activation function. arXiv preprint arXiv:1908.08681,
pages 1–14.
Mitra, S. and Acharya, T. (2007). Gesture recognition:
A survey. IEEE Transactions on Systems, Man,
and Cybernetics, Part C (Applications and Reviews),
37(3):311–324.
Molchanov, P., Yang, X., Gupta, S., Kim, K., Tyree, S., and
Kautz, J. (2016). Online detection and classification
of dynamic hand gestures with recurrent 3d convolu-
tional neural network. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4207–4215.
Mongillo, G. and Deneve, S. (2008). Online learning
with hidden markov models. Neural computation,
20(7):1706–1716.
Naguri, C. R. and Bunescu, R. C. (2017). Recognition
of dynamic hand gestures from 3d motion data using
lstm and cnn architectures. In 2017 16th IEEE Inter-
national Conference on Machine Learning and Appli-
cations (ICMLA), pages 1130–1133. IEEE.
Nguyen, P., Liu, T., Prasad, G., and Han, B. (2018).
Weakly supervised action localization by sparse tem-
poral pooling network. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 6752–6761.
Ni, P., Lv, S., Zhu, X., Cao, Q., and Zhang, W. (2020). A
light-weight on-line action detection with hand trajec-
tories for industrial surveillance. Digital Communica-
tions and Networks.
Papadopoulos, K., Ghorbel, E., Aouada, D., and Ottersten,
B. (2019). Vertex feature encoding and hierarchical
temporal modeling in a spatial-temporal graph convo-
lutional network for action recognition. arXiv preprint
arXiv:1912.09745.
Polfreman, R. (2018). Hand posture recognition: Ir, semg
and imu.
Shi, L., Zhang, Y., Cheng, J., and Lu, H. (2019). Two-
stream adaptive graph convolutional networks for
skeleton-based action recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 12026–12035.
Si, C., Chen, W., Wang, W., Wang, L., and Tan, T. (2019).
An attention enhanced graph convolutional lstm net-
work for skeleton-based action recognition. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 1227–1236.
Tang, C., Li, W., Wang, P., and Wang, L. (2018). Online
human action recognition based on incremental learn-
ing of weighted covariance descriptors. Information
Sciences, 467:219–237.
Tao, L., Elhamifar, E., Khudanpur, S., Hager, G. D., and
Vidal, R. (2012). Sparse hidden markov models for
surgical gesture classification and skill evaluation. In
International conference on information processing
in computer-assisted interventions, pages 167–177.
Springer.
Wang, X., Xia, M., Cai, H., Gao, Y., and Cattani, C. (2012).
Hidden-markov-models-based dynamic hand gesture
recognition. Mathematical Problems in Engineering,
2012.
Wu, Z., Pan, S., Chen, F., Long, G., Zhang, C., and Philip,
S. Y. (2020). A comprehensive survey on graph neural
networks. IEEE Transactions on Neural Networks and
Learning Systems.
Xu, D., Wu, X., Chen, Y.-L., and Xu, Y. (2015). Online
dynamic gesture recognition for human robot interac-
tion. Journal of Intelligent & Robotic Systems, 77(3-
4):583–596.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. In Thirty-second AAAI conference
on artificial intelligence.
Yu, J., Yoon, Y., and Jeon, M. (2020). Predictively en-
coded graph convolutional network for noise-robust
skeleton-based action recognition. arXiv preprint
arXiv:2003.07514.
Zhao, X., Li, X., Pang, C., Zhu, X., and Sheng, Q. Z. (2013).
Online human gesture recognition from motion data
streams. In Proceedings of the 21st ACM international
conference on Multimedia, pages 23–32.
Zheng, W., Jing, P., and Xu, Q. (2019). Action recog-
nition based on spatial temporal graph convolutional
networks. In Proceedings of the 3rd International
Conference on Computer Science and Application En-
gineering, pages 1–5.
Zhu, W., Lan, C., Xing, J., Zeng, W., Li, Y., Shen,
L., and Xie, X. (2016). Co-occurrence feature
learning for skeleton based action recognition us-
ing regularized deep lstm networks. arXiv preprint
arXiv:1603.07772.
Graph Convolutional Networks Skeleton-based Action Recognition for Continuous Data Stream: A Sliding Window Approach
435
