
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult
Light Conditions
Michela Lecca
a
Fondazione Bruno Kessler, via Sommarive 18, Trento, Italy
Keywords:
Retinex, Bilateral Filter, Spatial Color Algorithm, Image Enhancement.
Abstract:
This paper presents SuPeR-B, a novel, Retinex inspired color spatial algorithm to enhance images acquired
under difficult light conditions, such as pictures containing dark and bright regions caused by backlight and/or
local, not diffused spotlight. SuPeR-B takes as input a color image and improves its readability by processing
its color channels independently in accordance with some principles of the Retinex theory. Precisely, SuPeR-
B re-works the channel intensity of each pixels accounting for differences computed both in the spatial and
intensity domains. In this way, SuPeR-B acts as a bilater filter. The experiments, carried out on a real-world
dataset, shows that SuPeR-B ensures good enhancement results, also in comparison with other state-of-the-art
algorithms: SuPeR-B improves the overall content of the image, making the dark regions brighter and more
contrasted, while lowering possible chromatic dominants of the light.
1 INTRODUCTION
An image enhancer is an algorithm that improves the
visibility of the content and of the details of an in-
put image. Such an algorithm is particularly needed
each time an image has been acquired under difficult
light conditions, like low-light, back-light and/or mul-
tiple light sources, which cause noise, color distor-
tions and strong shadows and make hard to under-
stand what the image depicts. Improving the image
quality is essential not only for human observers but
also for all the machine vision algorithms requiring
an accurate detail visibility, such as key-point detec-
tors for robust and illumination invariantimage/object
recognition (Lecca et al., 2019). Many methods for
enhancing pictures captured under bad illuminations
have been proposed in the literature. Some exam-
ples are global and local image methods exploiting
statistical analysis, e.g. (Zuiderveld, 1994), (Gianini
et al., 2014), Retinex inspired algorithms and variants,
e.g. (Morel et al., 2010), (Bani´c and Lonˇcari´c, 2013),
(Lecca et al., 2018), (Lecca and Messelodi, 2019),
(Bani´c and Lonˇcari´c, 2015), illuminance/reflectance
decomposition approaches, e.g. (Guo et al., 2017),
(Wang et al., 2013), (Fu et al., 2016), machine learn-
ing techniques, e.g. (Jiang et al., 2019), (Wei et al.,
2018), (Lv et al., 2018), (Li et al., 2020).
a
https://orcid.org/0000-0001-7961-0212
Despite the huge efforts made till now, image en-
hancement is still an open issue. In fact, the most
enhancers rely on specific hypotheses about illumina-
tion, reflectance and spectral properties of the acqui-
sition device. These assumptions limit the enhancer
applicability to specific contexts. For instance, many
algorithmsassume that the illumination varies slightly
across the image, but this preventsthe enhancementof
images with abrupt changes of light, as for instance
strong shadows. In this respect, the enhancement of
images with very dark and very bright regions has
been poorly investigated. These images are usually
generated by capturing scenes with backlight or local,
brilliant but not diffused spotlights (see fig. 1).
This work contributes to the state of the art on the
enhancement of such images by presenting SuPeR-B,
a novel spatial color algorithm obtained as a variant of
the Retinex inspired image enhancer SuPeR (Lecca
and Messelodi, 2019). Both SuPeR and SuPeR-B
take as input a color image, process their channels
separately, and partition each channel by regular, not
overlapping tiles, which are treated as super-pixels
and processed according to some principles of the
Retinex theory. The acronym SuPeR comes from
Italic letters marked above. SuPeR rescales the in-
tensity I(x) of any pixel x by a value, which is com-
puted as the average of the tile maximum intensities
greater than I(x), where each intensity is weighted
by a function inversely proportional to the distance
76
Lecca, M.
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult Light Conditions.
DOI: 10.5220/0010235900760086
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
76-86
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Examples of images captured with backlight and
with local, not diffuse spotlight and their versions enhanced
by SuPeR-B (α = 0, a,b = -1). In the backlight image (top,
left), the subject is displayed against a brilliant sky and ap-
pears dark. In the spotlight image (top, right), the monitor
of the notebook positioned in a dark room acts as a local,
not diffused spotlight, that cannot illuminate sufficiently the
near-by regions. In both the cases, the image content with-
out enhancement is unreadable.
of the tile barycenter from x. The resulting image is
an enhanced version of the input one: it is brighter
and more contrasted, has a lower color distribution
entropy, while shadows and color casts possibly due
to the light are smoothed or even removed. The
experiments show that SuPeR provides an accurate
image enhancement of the most of real-world, low-
light images with very fast computational times, but
its performance decreases in case of backlight and
spotlight images. SuPeR-B (where ’B’ stands for
’back-light’ but also indicates that this is a second,
improved version of SuPeR) overcomes this prob-
lem by implementing a novel function weighting the
tile intensities involved in the enhancement of I(x).
This function, modeled by a Coon patch, accounts
not only for the distance between the tile barycen-
ters and x but also for the amount of the difference
between the tile maximum intensity and I(x). In this
way, SuPeR-B acts like a bilateral filter which pro-
cesses pixelwise the image based both on intensity
and spatial features, brightening dark regions within
edge preservation. The experiments carried out on
a dataset of real-world back-light and spotlight im-
ages show that SuPeR-B outperforms SuPeR as well
as other algorithms at the state of the art, in particular
the multi-scale Retinex algorithm (Petro et al., 2014),
the channel-division approach (Ramirez Rivera et al.,
2012), the image fusion-based enhancer for single
backlit images (Wang et al., 2016) and the learning
based approach for image restoration (Li and Wu,
2018). In this framework, the performance of SuPeR-
B have been evaluated by comparing the brightness,
the contrast and the color distribution entropy of the
test images before and after the enhancement. The
results show that SuPeR-B increases the brightness
and contrast, lowers the color distribution entropy and
preserves the important edges, meaning that the en-
hanced image has more visible details and a more
readable content than the input one.
2 RELATED WORK
The enhancement of images with dark and bright re-
gions due to the light has been scarcely addressed
in the literature. From the hardware point of view,
the high dynamic range (HDR) devices attempt to
deal with the root of the problem, by capturing multi-
exposure images of the same scene and merging them
via tone mapping functions in order to generate a high
quality pictures. Nevertheless, the HDR tone map-
ping functions often introduce in the final image un-
pleasant distortions and artifacts, and thus they them-
selves are subject of current research. In addition,
HDR imaging cannot solve the problem of enhancing
an existing image where the light conditions hamper
the visibility of the content of some regions.
The image enhancers working globally, such as
histogram equalization, generally perform scarcely
because they do not account for the variability of the
light across the scene. Better performance is reached
by spatial adaptive enhancers, such as many Retinex
inspired algorithms. These latter basically process the
image channels separately and re-work the channel
intensity of each pixel x based on the intensity (and
sometimes also on other visual features like gradient)
of pixels sampled from a neighborhood of x. The out-
put image is brighter and more contrasted than the
input one, possible shadows and color casts due to
the illumination are smoothed or even removed, the
dynamic range of the image is stretched. In other
Retinex inspired algorithms, the local spatial informa-
tion is modeled through a function of the distance of
x from the pixels selected as relevant for the enhance-
ment, e.g. (Jobson et al., 1997), (M. Lecca, A. Rizzi,
and R.P. Serapioni, 2017), (Lecca, 2018), (Lecca and
Messelodi, 2019). For all the Retinex inspired meth-
ods, the definition of the locality, i.e. of the neighbor-
hood of x to be processed or of the distance function,
is a key point. For instance, when the all the pix-
els around x are considered, these algorithms tends
to behave like the Max-RGB algorithm. This latter
rescales the intensity of each pixel by the maximum
intensity over the image, but this leads to unsatis-
factory results on most real world and noisy images.
When the neighborhood of x is very small, the final
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult Light Conditions
77

image is close to an edge map, where chromatic in-
formation and some details are lost. A priori knowl-
edge about image content and/or light sources may
greatly help to choose the neighborhood or distance
function maximizing the algorithm performance, but
such a knowledge is often unavailable.
Retinex algorithms at multiple resolution allow to
simulate the effects of HDR imaging (Jobson et al.,
1997), (Petro et al., 2014): the input image is pro-
cessed sequentially by a Retinex algorithm with in-
creasing neighborhood (or support for the distance
function) and the obtained images are averaged to-
gether. This approach avoids the user to select a spe-
cific extent of the pixel neighborhood while stretches
the dynamic range of the image, brightening the dark
regions. Nevertheless, the prize to pay is a longer
computational time, a less accurate removal of the
light effects and sometimes the generation of artifacts.
Other algorithms, e.g. (Tsai and Yeh, 2010),
(Li and Wu, 2018), (Ramirez Rivera et al., 2012),
specifically address the problem of enhancing back-
light/spotlight images. To this purpose, they segment
the input image in backlight/frontlight regions and re-
work them with different enhancing functions. In par-
ticular, the work in (Tsai and Yeh, 2010) segments
the image by thresholding, then linearly stretches and
shifts separately the dark and bright regions in order
to brighten the first one and darken the second one. A
variant of this computational scheme is proposed by
(Li and Wu, 2018) (hereafter denoted as Backlit), that
replaces the thresholding based segmentation with a
region growing approach and introduces guided fil-
ters for improving the results. Specifically, the im-
age is partitioned in backlight and frontlight regions
through support vector machines and conditional ran-
dom fields, and each segmented region is enhanced
by a tone mapping function which maximizes the We-
ber contrast while minimizes tone distortions. Region
borders are processed by a linear combination of the
tone mapping functions estimated before to avoid ar-
tifacts. For all these approaches, the use of differ-
ent functions for enhancing the dark and bright re-
gions enables good results, which however strongly
depend on the segmentation accuracy. The work in
(Ramirez Rivera et al., 2012), here called Channel di-
vision, enhances edges and flat regions with different
approaches considering image texture. The enhance-
ment results obtained on edges and flat regions are
blended together to highlight details while maintain-
ing the smoothness of flat regions. This method pro-
vides good results for a wide range of images, but it
poorly works in extreme conditions, as for instance
on pictures with near-black portions, where the con-
trast computation is affected by noise. The work in
(Wang et al., 2016), here shortly named Fusion, pro-
poses a fusion method, that processes the input image
I in the HVS space and computes from I an image I
1
with over-enhanced dark regions, an image I
2
where
the dynamic range of bright regions has been com-
pressed, and image I
3
with enhanced contrast. Each
image I
i
is smoothed by a Laplacian operator to re-
move undesired halos, then it is pixel-wise multiplied
to a weight that controls its overall exposure. The re-
sulting images are averaged and the result is the en-
hanced version of I.
The difficulty in defining the spatial locality of the
image processing, the generation of artifacts along the
edges, the low quality of the image signal in dark re-
gions, the lack of a priori knowledge about the image
content are issues that make hard and challenging the
enhancement of a bad illuminated image and this jus-
tifies the research of new methods.
3 THE PROPOSED APPROACH
This Section presents SuPeR (3.1) and its variant
SuPeR-B (Subsection 3.2).
3.1 SuPeR
Among the many Retinex implementations and in par-
ticular among the algorithms of the Milano Retinex
family (Rizzi and Bonanomi, 2017), the Retinex in-
spired spatial color algorithm SuPeR is of interest not
only for its enhancement performance, but also for
its fast computational times, requiring less than 0.2
seconds to process an image with size 640 × 480
with 100 tiles on a standard PC with CPU Intel(R)
Xeon(R) CPU E3-1245 v6 at 3.70 GHz (see (Lecca
et al., 2019)).
SuPeR takes as input a color image
I and an inte-
ger parameter n > 0. It enhances
I by implementing
some principles which are at the basis of the Retinex
theory, i.e. 1) independent processing of the three im-
age channels; 2) channel processing based on local
spatial and intensity information; 3) image enhance-
ment with smoothing/removal of light effects.
Let us introduce some notation. Let I be a chan-
nel of
I and let S be the domain of I, i.e. the set of
the spatial coordinates of the pixels composing I (and
thus I). Let D denote the length of the diagonal of S.
Here, the channel I is regarded as a function from S
to the intensity range (0, 1], where zero has been ex-
cluded to enable the computation of intensity ratios.
Let L indicate the enhanced version of I.
SuPeR enhances
I by implementing sequentially a
global and a pixel-wise image processing.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
78

Figure 2: Examples of images (on left) enhanced by SuPeR
(on right) with n = 25.
In the global processing, SuPeR partitions S in n rect-
angular, not overlapping tiles T
1
,. ..,T
n
by a regular
grid superimposed on S. According to the principle
1 reported above, SuPeR processes each channel in-
dependently. Specifically, given the channel I, SuPeR
computes the set B = {(b
i
,m
i
) : i = 1,.. .,n}, where
b
i
∈ S is the barycenter of T
i
and m
i
is the maximum
channel intensity over T
i
.
In the pixel-wise processing, SuPeR maps the inten-
sity I(x) of any x ∈ S on a new value L(x) defined as
follows:
L(x) =
∑
(b,m)∈B
x
(1−d(x,b))
I(x)
m
∑
(b,m)∈B
x
(1−d(x,b))
if B
x
6=
/
0
1 otherwise
(1)
where B
x
= {(b,m) ∈ B : I(x) < m} and d is the Eu-
clidean distance between x and b, normalized to range
between 0 and 1:
d(x,b) =
k x − b k
2
D
2
. (2)
According to Equation (1), given the point x, Su-
PeR selects from B the subset B
x
composed by the
pairs (b,m) corresponding to tiles whose maximum
intensity exceeds I(x). If B
x
is empty, then the inten-
sity I(x) is mapped onto one, otherwise it is rescaled
by the values ms and each ratio I(x)/m is averaged
with a weight d depending on the distance of b from
x. This weight models the spatial locality of the al-
gorithm and decreases by increasing the distance of
b from x. This behaviour is in line with the Retinex
principle stating that the intensities close to x influ-
ence the perception of I(x) more than those located
further (principle 2).
The final enhanced image is obtained by packing
the L’s into an RGB image, which is robust to changes
of light (principle 3). In fact, the division of I(x)
by other intensity values enables smoothing or even
discounting light effects, such as shadows or color
dominants of the illumination. This is in line with
the von Kries model (Finlayson et al., 1994), (Lecca,
2014), stating that the change of any pixel RGB triplet
caused by a light variation can be approximated by
a linear diagonal transform of the RGB triplet. In
the original paper of SuPeR, the authors suggest to
smooth the input image by a median filter so that to
make the method robust to salt and pepper noise.
The experiments on SuPeR, conducted on real-
world images, showed good performance, both in
terms of enhancement and of computational time.
The images were improved by increasing their bright-
ness and their contrasts and by flattening their color
distribution. Some examples are shown in Fig. 2.
Nevertheless, in case of images with extreme con-
ditions, such as backlight and spotlight, the perfor-
mance of SuPeR decreases, as illustrated in Fig. 3
and discussed in the next Subsection.
3.2 SuPeR-B
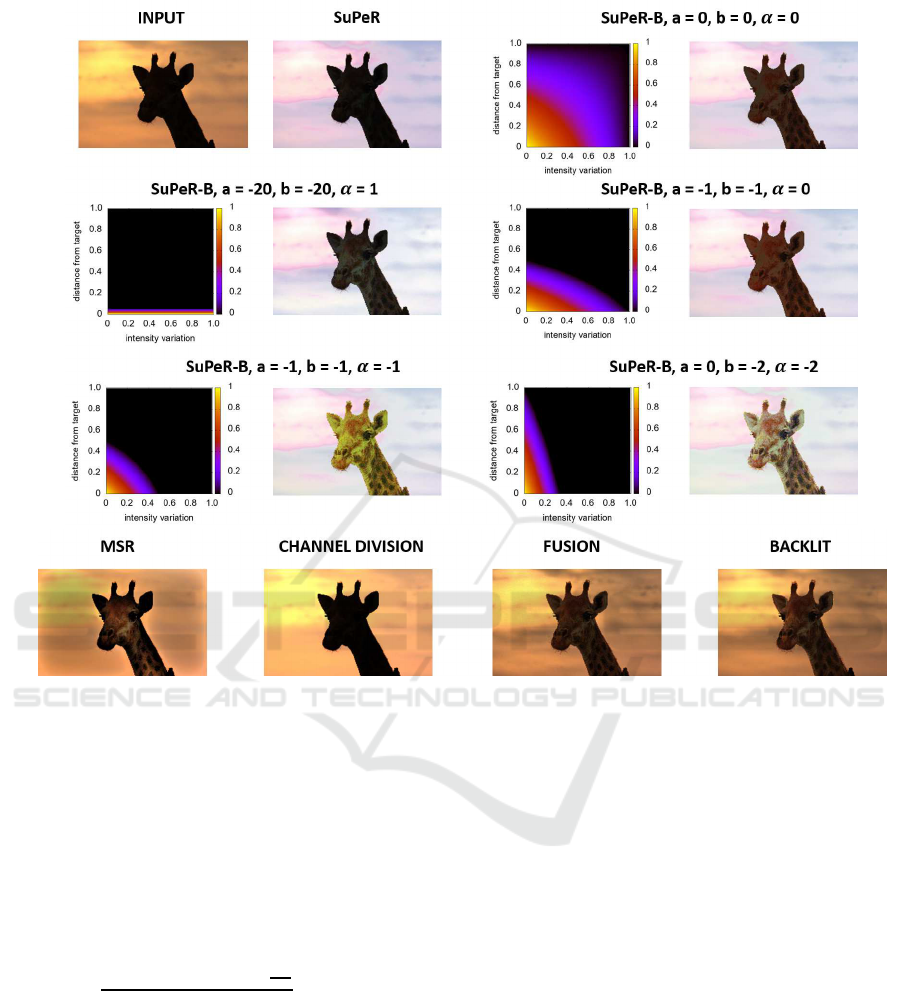
Figure 3 shows an example of image with extreme
backlight, depicting a giraffe against a brilliant, red-
dish sky. The enhancement by SuPeR smooths the
effects of the light changing the colors of the sky, but
the giraffe appears still dark and its details are unde-
tectable. Regarding the results of the other algorithms
specifically designed to cope with backlight, the algo-
rithm Channel Division (Ramirez Rivera et al., 2012)
performs poorly, while the others (i.e. the multi-scale
Retinex MSR described in (Petro et al., 2014), Fusion
(Wang et al., 2016) and Backlit (Li and Wu, 2018))
work a little better, but the visibility of the giraffe re-
mains low.
The bad result by SuPeR is due to the fact that the
intensity values of the pixels inside the dark regions
are divided by much greater intensity values sampled
from the sky. Although penalized by the distance
function, these sky intensities contribute heavily to
the image enhancement and make the values of L de-
creasing on the giraffe region. As already mentioned
in Section 3, multi-resolution Retinex inspired algo-
rithms, as MSR, tend to generate artifacts and they do
not ensure a good removal/smoothing of the light ef-
fects. This discourages the application of SuPeR at
multiple scales. Thresholding the distance function in
Equation (1) to exclude the high sky intensities from
the enhancement of the dark region may appear a pos-
sible way to increase the giraffe intensities, but it may
cause the loss of important edges, as those on the bor-
ders. A novel solution is proposed by SuPeR-B.
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult Light Conditions
79
(a)
(b)
Figure 3: (a) Image enhancement of a backlight image by SuPeR and by SuPeR-B for different values of the parameters a,b
and α. For SuPeR-B the weighting function is also shown. (b) Image enhancement of the input image in (a) by the algorithms
compared with SuPeR-B.
SuPeR-B inherits from SuPeR the general work-
flow, i.e. it processes the image channels separately
by the two global and local routines of SuPeR, but
introduces in Equation (1) a novel function f that
weights the contribution of the intensities in B
x
not
only upon their spatial distance from x but also upon
their difference from I(x). Specifically, SuPeR-B re-
places the equation (1) with the following one:
L
B
(x) =
∑
(b,m)∈B
x
f(δI(x,b),d(x,b))
I(x)
m
∑
(b,m)∈B
x
f(δI(x,b),d(x,b))
if B
x
6=
/
0
1 otherwise
(3)
where δI(x,b) = I(b) − I(x) and f weights the inten-
sities close to x and to I(x) more than the other values.
While on bright regions the values of f is almost ir-
relevant, on dark regions they are set to increase the
brightness and the detail visibility.
There exist many expressions for f and differ-
ent expressions produce different enhancement lev-
els. In the current implementation of SuPeR-B, f
is modeled by a Coon patch, i.e. a compact surface
in 3D space whose borders are described by paths in
2D space intersecting two by two at the four patch
corners (see Figure 4 for an example). Precisely,
let c
0
,d
0
,c
1
,d
1
: [0,1] → R be four continuous paths
with c
0
(0) = d
0
(0), c
0
(1) = d
1
(0), c
1
(0) = d
0
(1)
and c
1
(1) = d
1
(1). The equation of the Coon patch
bounded by these paths is:
C(s,t) = S(s,t) + T(s,t) −U(s,t) (4)
where
S(s,t) = (1−t)c
0
(s) + tc
1
(s)
T(s,t) = (1− s)d
0
(t) + sd
1
(t)
U(s,t) = c
0
(0)(1− s)(1− t) + c
0
(1)s(1− t) +
c
1
(0)(1− s)t + c
1
(1)st.
Pictorially, we can imagine that the endpoints of the
path c
0
, which belongs to the xz plane, move respec-
tively along the paths d
0
and d
1
modifying the shape
of c
0
accordingly until c
0
rests (and coincides) with
c
1
. The same representation holds for d
0
, whose end-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
80

points are initially overc
0
(0) and c
1
(0) and go respec-
tively to d
1
(0) and d
1
(1) until d
0
reaches (and coin-
cide with) d
1
. Moving the corners and/or changing
the path equations allows to model a lot of surfaces.
Figure 4: Example of Coon surface in 3D space.
In the current version of SuPeR-B, the paths c
0
,
c
1
, d
0
and d
1
are lines defined as follows:
c
0
(s) = s(α− 1) + 1
c
1
(s) = s(b− a) + a
d
0
(t) = t(a− 1) + 1
d
1
(t) = t(b− α) + α
where α, b, a are real-world user parameters and s,t ∈
[0,1]. In order to ensure positivity of the weights, the
function f is defined as
f(s,t) = max(C(s,t), 0), (5)
where the parameters s and t represent respectively
the variation of intensity δI and the value of d between
two image pixels.
The values of α,a,b must be chosen so that (i)
to satisfy the Retinex principle stating that the contri-
bution of the sampled pixels to the enhancement de-
creases with their distance from x, and (ii) to improve
the visibility of the image content in the dark regions
by weighting more the items of B
x
closest to I(x) in
the intensity space. As a general condition, for α,a,b
such that
α ≤ 1,a < 1, b ≤ min{a,α} (6)
the requirements (i) and (ii) are satisfied. In fact,
when a ≥ 1, the intensities spatially located far from
x become more relevant than those close to x in the
computation of L(x) and this violates the requirement
(i). On the contrary, values of a < 1 enables the im-
plementation of (i). The parameter α acts in the in-
tensity domain similarly to d in the spatial domain:
α controls the contribution of δI to L(x), making the
intensities of B(x) closer to I(x) in the intensity do-
main more important than the others. The value α = 1
is in this case admitted and used to weight equally
the intensity variations at a given distance, regardless
of their amount, since c
0
(δI(x, b)) = 1 for any value
of δ(x,b). When α < 1, the relevance of δI(x,b) de-
creases proportionally to the value δI(x, b). The pa-
rameter b controls the value of f as d and δI grow
away: the lower b, the lower the effects of high val-
ues of d and δI are on L(x). Values of b greater than
a and α make f increasing when d and δI grow and
this trend has to be prevented because in contrast with
both the requirements (i) and (ii). Therefore, b must
be smaller than min{a,α}. Finally, we note that for
some choices of α,a,b, the values of C may become
smaller than zero: these valuesmust be excluded from
the computation of f, therefore C is cast to zero as
described by Equation (1). This operation extends the
range of variability of the parameters α,a, b defined
by the inequalities (6), cutting down values of f for
which the requirements (i) and (ii) are not fulfilled.
Examples of f obtained for different values of
α,a,b are shown in Fig. 3 along with the correspond-
ing enhancement by SuPeR-B. For all the parameter
values used here, the yellowish color due to the light
has been removed. In particular, for α = 0,−1, the
input image has been remarkably improved. A more
deep analysis of the enhancement results of SuPeR-B
is provided in the next Section.
3.3 Experiments
The performance of SuPeR-B has been measured on
a database of 60 images with dark and bright regions
at different proportions. These images have been
taken from Pixabay (https://pixabay.com/), from pri-
vate collections of the author and from databases pub-
lished on the net and used to test and illustrate en-
hancement methods, e.g. (Wang et al., 2016), (Fu
et al., 2016), (Li and Wu, 2018), (Ramirez Rivera
et al., 2012). Some examples of such images are
shown in Figures 3 and 4.
The results of SuPeR-B have been compared with
the four enhancers briefly described in Section 2,
i.e. Channel Division (Ramirez Rivera et al., 2012)
1
,
Fusion (Wang et al., 2016)
2
, Backlit (Li and Wu,
2018)
3
along with an implementation of the multi-
scale Retinex implementation (Petro et al., 2014)
4
.
The evaluation has been carried out by comparing
three objective measures of image quality before and
after applying the enhancement procedures. These
measures, that are widely used to judge the perfor-
1
Code: http://vision.khu.ac.kr/?page
id=551
2
Code: https://xueyangfu.github.io/
3
Code: https://github.com/7thChord/backlit
4
Code: https://it.mathworks.com/matlabcentral/
fileexchange/71386-multiscale-retinex
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult Light Conditions
81
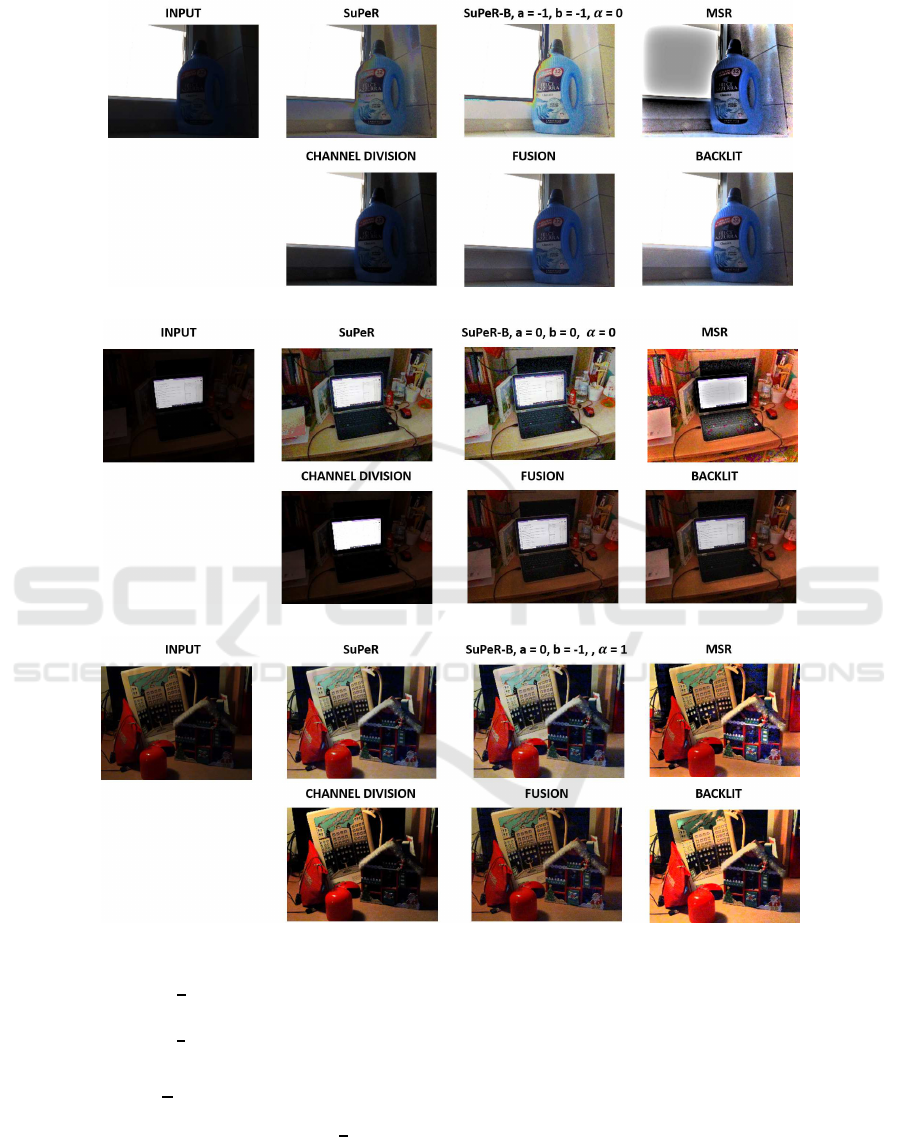
(a) Enhancement of a Backlight Image
(b) Enhancement of a Spotlight Image
(c) Enhancement of a Dark Image
Figure 5: Comparison of enhancement results on a (a) backlight, (b) spotlight, (c) dark image.
mance of an enhancer,are computed on the brightness
Br of any color image
I. Br is the gray-levelimage de-
fined on S and obtained by averaging pixel-wise the
channel intensities of
I, i.e.:
Br(x) =
1
3
3
∑
i=0
I
i
(x) ∀ x ∈ S, (7)
where the I
i
s denote the color channels of
I.
The evaluation measures are defined as follows:
1. Flatness of the luminance probability density (f
0
),
i.e. the L
1
distance between the probability den-
sity function of Br and the uniform probability
density function. The lower f
0
, the lower the en-
tropy of Br is. An image enhancer is expected to
decrease the value of f
0
measured on the input im-
age. In fact, this means that in the enhanced image
the dynamic range of the colors is wider than in
the input image, meaning that strong changes of
light and brightness have been smoothed or even
removed;
2. Mean value of the brightness (f
1
), i.e. the aver-
age of the intensities of Br. Enhancement usually
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
82

increases the value of f
1
, since it makes the input
image brighter;
3. Mean value of the multi-resolution luminance
contrast (f
2
), i.e. a measure of the local varia-
tions of the Br values at multiple scales proposed
in (Rizzi et al., 2004). f
2
is computed as follows.
The image Br is sequentially half-scaled. For each
rescaled version Br
s
of Br, a pixel wise contrast
cBr
s
(x) and a global contrast cBr
s
are computed.
Precisely, cBr
s
(x) is the average value of the ab-
solute differences between the luminance Br(x) at
x ∈ S and its 8-neighboring values, while cBR
s
is
the mean value of the cBr
s
(x)’s. The measure f
2
is defined as the mean value of the cBr
s
’s over the
number of scale factors. Any enhancer is expected
to improve the visibility of the details, and thus to
increase the value of f
2
with respect to that of the
input image.
It is to note that the exact amount of the f
0
, f
1
and
f
2
depend on the image content. Images with already
clear (unreadable, resp.) content have usually a low
(high, resp.) value of f
0
and high (low, resp.) val-
ues of f
1
and f
2
. What is important to evaluate an
enhancer is the variation of the f
i
s after the enhance-
ment: the less readable the image, the more relevant
this variation is. Therefore, in this work the evalu-
ation of the performances of the enhancers has been
conducted by comparing the values of the f
i
s on the
input and on the enhanced images. In addition, in or-
der to provide more detailed information about the en-
hancement of the dark and bright regions, each input
image has been segmented in two parts P
B
and P
D
.
The f
i
s are thus computed on P
D
and P
B
instead of
the whole image and indicated respectively with f
D
i
and f
B
i
. The segmentation has been performed by a
thresholding procedure such that:
P
B
= {x ∈ S : Br(x) > τ} (8)
P
D
= {x ∈ S : Br(x) ≤ τ} (9)
and τ = (max
x∈S
Br(x) − min
x∈S
Br(x))/2. Basically,
this segmentation partitions the input image in two re-
gions with different luminance, with P
D
darker than
P
B
. Despite naive, this segmentation allows to sepa-
rate the frontlight and backlight regions of the input
images in a sufficiently reliable way.
The current implementation of SuPeR-B is written
in C++. The parameter n has been set to 100. The ex-
periments have been repeated for different triplets of
(a,b,α) obtained by varying a,b in {−1,0} and α in
{-1, 0, 1} within the inequalities in formula (6). For
α = 1 and a = b = 0, SuPeR-B behaves like SuPeR.
The function f, that is computed in the global pro-
cessing phase, is discretized and represented as a ma-
trix with size 100×100 to speed up the computational
time for the enhancement, that is on average less than
1 second (on a notebook with Intel CORE i5 and op-
erating system Windows 10). In these experiments,
no median filter has been applied.
Table 1 reports the mean values of the perfor-
mance evaluation measures computed on the whole
image (f
i
s), on the bright region P
B
(f
B
i
s) and on the
dark region ( f
D
i
s). Precisely, these values have been
averaged over the number of dataset images.
All the enhancers improve the image content, by
increasing the values of f
1
and f
2
, while decreasing
that of f
0
. MSR achieves the best results in term of
f
0
and f
2
, but as already observed in the paper MSR
suffers for halos generation (see Fig. 5(a) for an ex-
ample). Channel Division outputs the worst results in
terms of f
0
and f
1
, returning an image still dark and
with a remarkable difference between dark and bright
regions, as proved by the gap between f
B
1
s and f
D
1
s
(see for instance, Fig. 5(b) and (c)). In particular,
Channel Division yields the highest value of f
B
1
and
the lowest value of f
D
1
. For α = −1, SuPeR-B out-
puts the highest values of f
1
and very low values of
f
0
, while in general, for any choice of the parameters
α,a,b, it obtains values of f
2
close to those of Chan-
nel Division, SuPeR, Fusion and Backlit.
A similar trend is observed for the dark regions
P
D
. Again, the readability of the P
D
s is improved
by all the enhancers, MSR grants the lowest f
D
0
and
the highest f
D
2
, Channel Division reports the lowest
f
0
and SuPeR-B performs similar to SuPeR, Fusion,
Backlit and Channel Division in terms of contrast
while reports for α = −1 very high values of f
D
1
and
very low values of f
D
0
.
The results on the P
B
s could appear quite surpris-
ing: in fact, here, apart from Channel Division, all the
enhancers increase the brightness, but decrease the
contrast, while the histogram flatness remains high
and in many cases exceeds that measured on the in-
put images. This behaviour is justified as follows. On
the bright regions, enhancement is usually not neces-
sary since the content is already clear. Anyway, the
brightness of the P
B
s, that is on average very high on
the input, is further increased by the enhancers, al-
though much less than that of the P
D
s. The point is
that in the enhanced images, the brightness is very
close to its maximum value (i.e. 255) and conse-
quently its histogram is peaked on right and thus far
from an uniform probability density function (i.e. f
D
0
is high). Moreover, in the dataset considered here,
the bright regions are often almost uniform or present
few or slight edges. The main contribution to the
contrast of the P
B
s comes from their boundaries with
the dark regions P
D
s. Despite the enhancers preserve
these boundaries, they diminish their magnitude be-
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult Light Conditions
83
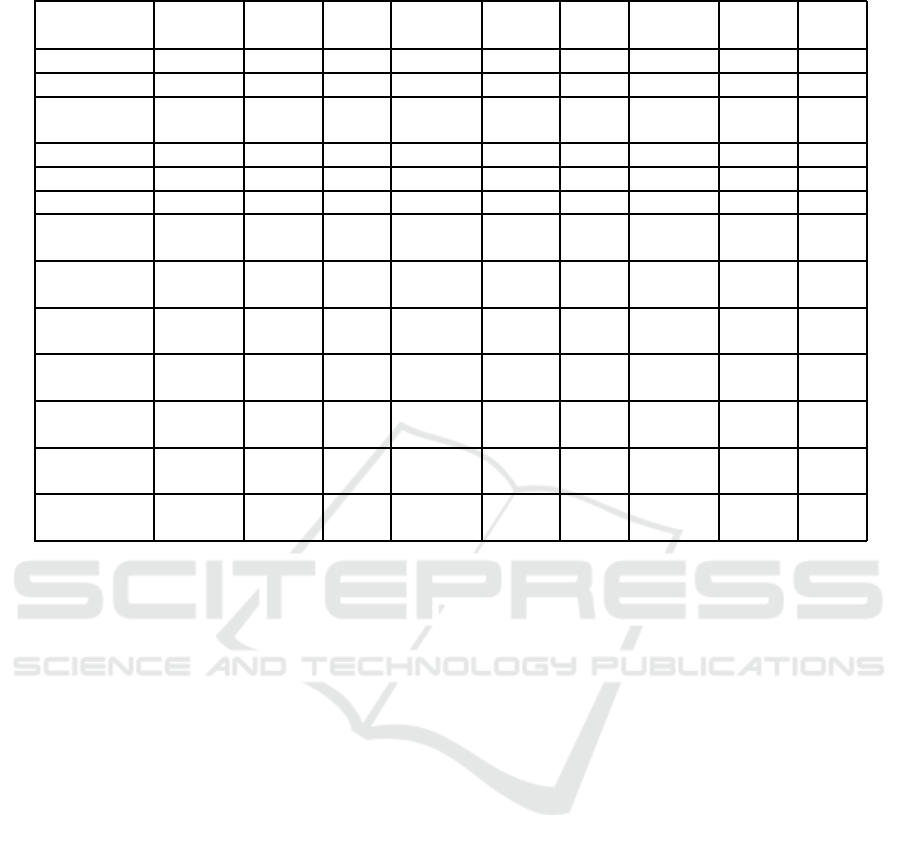
Table 1: Evaluation of SuPeR-B in comparison with other enhancers. For SuPeR-B the triplet (α,a, b) is reported.
Algorithm f
0
f
1
f
2
f
B
0
f
B
1
f
B
2
f
D
0
f
D
1
f
D
2
[×10
−3
] [×10
−3
] [×10
−3
]
INPUT 4.17 67.79 16.56 4.92 179.33 33.07 5.26 29.74 14.58
MSR 2.21 118.12 28.66 4.69 185.23 30.51 2.35 97.24 31.66
CHANNEL 4.04 89.45 21.60 5.86 228.30 36.03 4.53 41.49 20.97
DIVISION
FUSION 3.23 89.54 20.52 4.84 189.51 32.27 4.22 56.82 19.82
BACKLIT 2.78 100.65 22.79 4.68 189.30 28.35 3.47 73.26 23.55
SuPeR 3.41 104.95 19.95 5.40 210.54 29.78 4.25 65.56 19.63
SuPeR-B 3.34 106.64 20.06 5.40 210.78 29.61 4.17 67.71 19.31
(1, 0, -1)
SuPeR-B 3.31 105.32 20.17 5.37 210.51 30.07 4.15 66.16 19.87
(1, -1, -1)
SuPeR-B 3.17 119.31 20.05 5.51 213.03 26.53 3.95 84.12 20.46
(0, 0, 0)
SuPeR-B 3.02 123.13 20.19 5.53 213.47 25.84 3.75 89.81 20.83
(0, 0, -1)
SuPeR-B 2.89 123.48 20.48 5.50 213.43 26.14 3.61 90.02 21.15
(0, -1, -1)
SuPeR-B 2.92 141.15 20.08 5.88 218.83 20.42 3.26 113.97 22.17
(-1, 0, -1)
SuPeR-B 2.78 142.35 20.33 5.87 219.29 20.28 3.05 115.44 22.55
(-1, -1, -1)
cause they increase the brightness of P
D
: this causes
the decrease of f
D
2
. Channel Division represents an
exception, since the trend of the f
B
i
s is the same of
those of the f
D
i
and of the f
i
s. Nevertheless, as al-
ready mentioned above, among the enhancers, this al-
gorithm achieves unsatisfactory results, with still dark
images characterized by high gap between f
B
1
and f
D
1
.
Regarding SuPeR-B, it is to note that the values of
f
B
2
s it reports are in general smaller than those of the
other enhancers. This is because, in line with Retinex
theory and as well as SuPeR, SuPeR-B tends to re-
move slight edges, that are often present in the bright
regions but that are considered to be irrelevant for un-
derstanding the main content of the scene. In particu-
lar, the low values of f
B
2
indicate a scarce presence of
edges on P
B
, and this justifies the high values of f
B
0
.
Figure 3 shows that different values of α,a,b pro-
vide very different enhancement results. In accor-
dance with Equation (3), the parameters α and a tune
respectively the contributions to L
B
(x) of the intensity
differences and of the spatial differences, while the
parameter b controls both these contributions when
the intensity and spatial differences are large. In par-
ticular, lowering α increases the weight of the small
intensity differences and this generally higher the val-
ues of f
1
and f
2
, especially in dark areas. For any
fixed value of α, low values of a increase the spa-
tial locality of the algorithm, yielding again high val-
ues of f
1
and f
2
. Low values of b further decreases
the weight of high intensity and spatial differences.
Therefore, the lower α, a,b, the higher the locality of
the algorithm in spatial and intensity domains is.
According to such observations, when α = 1,
SuPeR-B behaves similarly to SuPeR: in fact, in this
case the contribution to L
B
(x) of the intensity varia-
tions does not depend on their amount and the Coon
patch is close to a stepway, whose slope is determined
by the spatial terms. As already mentioned before,
for α = 1,a = b = 0, SuPeR-B implements SuPeR,
where the locality of the image processing depends
exclusively on the spatial features. Figure 3(a) show
an example of image enhancement obtained by tuning
only the contribution of the spatial differences with
α = 1,a = b = −20: the details of the giraffe be-
come a little more visible, but the giraffe is still quite
dark and its borders are very tick, so that the results
is unsatisfactory. Better results are obtained by tun-
ing the algorithm locality also in the intensity domain,
as shown by the enhanced pictures of Figure 3(a) ob-
tained for α = −1,−2.
In general, the experiments show that for backlight
and spotlight images the best performance is achieved
by tuning the differences in both the spatial and inten-
sity domains.
Finally, differently from the algorithms consid-
ered here exept for SuPeR, SuPeR-B exhibits the im-
portant property of lowering the color cast due to the
illumination, returning an enhanced image robust to
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
84

changes of light. This property is clearly illustrated in
Figure 5(c) and it is of great importance for many ma-
chine vision algorithms, such as illumination invari-
ant feature matching and people/object recognition in
real-world scenarios.
4 CONCLUSIONS
Figure 6: Examples of usage of SuPeR-B as a pre-
processing step of the key-point detector in (Lowe, 2004):
the enhancement of the input images (on left) grants a better
detection of key-points (in green color, on right) in the dark
regions.
The Retinex inspired spatial color algorithm SuPeR-
B proposes a novel and efficacious technique to en-
hance images captured under difficult light, in partic-
ular under backlight and local, not diffused spotlights
that hamper understandingthe image content. SuPeR-
B basically implements a bilateral processing of the
channel intensities of the image pixels that enable
brightening dark regions, smoothing color casts due
to the light, while preserving important edges. The
bilateral processing is modeled by the weighting func-
tion f, that here has been expressed as a Coon surface
bounded by lines. The experiments proved that this
choice of f provides a satisfactory level of enhance-
ment, also in comparison with other algorithms at the
state-of-the-art. The input images are remarkably im-
proved by SuPeR-B, which increase their brightness
and detail visibility, especially in the dark areas, while
decrease the overall color distribution entropy.
As mentioned in Section 3, there are many expres-
sions for f: determining the equation of f and the
values of its parameters most suitable for enhancing
an image within a given task is a critical point for
a reliable and aware usage of SuPeR. In general, in
the current implementation of SuPeR-B, the choice
of the values of α,a,b to be input to SuPeR-B should
be guided by the applications at the hand as well as by
the image content. For instance, for human inspection
of the content of the giraffe image in Figure 3, the val-
ues (α,a, b) = (0, 0, 0) and (1, 0, -1) perform poorly
in comparison with the others. In other cases, like for
(α,a, b) = (-1, -1, -1), the brightness of the enhanced
image is too high and the image content is washed out
or over-enhanced. As a conclusion, the set-up of f is
an open issue to be investigated in the future.
Future work will also include the usage of SuPeR-
B within computer vision tasks that require to process
high quality images, as for instance image descrip-
tion and matching. In this respect, as pointed out in
(Lecca et al., 2019) and as illustrated by the examples
in Figure 6, the improvement of visual characteris-
tics such as brightness, contrast and color distribution
does not only grant a better visibility and readability
of the image content for humans, but it is also funda-
mental to improve the detection of image key-points
(here performed by SIFT (Lowe, 2004)) and thus to
increase the performance of algorithms for descrip-
tion and matching of images regardless of their illu-
mination conditions.
REFERENCES
Bani´c, N. and Lonˇcari´c, S. (2013). Light Random Sprays
Retinex: exploiting the noisy illumination estimation.
IEEE Signal Processing Letters, 20(12):1240–1243.
Bani´c, N. and Lonˇcari´c, S. (2015). Firefly: A hardware-
friendly real-time local brightness adjustment method.
In 2015 IEEE International Conference on Image Pro-
cessing (ICIP), pages 3951–3955.
Finlayson, G. D., Drew, M. S., and Funt, B. V. (1994).
Color constancy: generalized diagonal transforms suf-
fice. JOSA A, 11(11):3011–3019.
Fu, X., Zeng, D., Huang, Y., Liao, Y., Ding, X., and Pais-
ley, J. (2016). A fusion-based enhancing method
for weakly illuminated images. Signal Processing,
129:82–96.
Gianini, G., Manenti, A., and Rizzi, A. (2014). QBRIX: a
quantile-based approach to Retinex. J. Opt. Soc. Am.
A, 31(12):2663–2673.
Guo, X., Li, Y., and Ling, H. (2017). Lime: Low-light
image enhancement via illumination map estimation.
IEEE Transactions on Image Processing, 26(2):982–
993.
Jiang, Y., Gong, X., Liu, D., Cheng, Y., Fang, C., Shen, X.,
Yang, J., Zhou, P., and Wang, Z. (2019). Enlighten-
gan: Deep light enhancement without paired supervi-
sion. arXiv preprint arXiv:1906.06972.
Jobson, D. J., Rahman, Z., and Woodell, G. A. (1997).
Properties and performance of a center/surround
retinex. IEEE Transactions on Image Processing,
6(3):451–462.
Jobson, D. J., Rahman, Z.-u., and Woodell, G. A. (1997). A
multiscale retinex for bridging the gap between color
A Retinex Inspired Bilateral Filter for Enhancing Images under Difficult Light Conditions
85

images and the human observation of scenes. IEEE
Transactions on Image processing, 6(7):965–976.
Lecca, M. (2014). On the von Kries Model: Estimation,
Dependence on Light and Device, and Applications,
pages 95–135. Springer Netherlands, Dordrecht.
Lecca, M. (2018). STAR: A segmentation-based approx-
imation of point-based sampling Milano Retinex for
color image enhancement. IEEE Transactions on Im-
age Processing, 27(12):5802–5812.
Lecca, M. and Messelodi, S. (2019). SuPeR: Milano
Retinex implementation exploiting a regular image
grid. J. Opt. Soc. Am. A, 36(8):1423–1432.
Lecca, M., Simone, G., Bonanomi, C., and Rizzi, A. (2018).
Point-based spatial colour sampling in milano-retinex:
a survey. IET Image Processing, 12(6):833–849.
Lecca, M., Torresani, A., and Remondino, F. (2019). On im-
age enhancement for unsupervised image description
and matching. In Ricci, E., Rota Bul`o, S., Snoek, C.,
Lanz, O., Messelodi, S., and Sebe, N., editors, Image
Analysis and Processing – ICIAP 2019, pages 82–92,
Cham. Springer International Publishing.
Li, S., Cheng, Q. S., and Zhang, J. (2020). Deep multi-path
low-light image enhancement. In 2020 IEEE Confer-
ence on Multimedia Information Processing and Re-
trieval (MIPR), pages 91–96.
Li, Z. and Wu, X. (2018). Learning-based restoration of
backlit images. IEEE Transactions on Image Process-
ing, 27(2):976–986.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Lv, F., Lu, F., Wu, J., and Lim, C. (2018). MBLLEN: Low-
light image/video enhancement using cnns. In BMVC,
page 220.
M. Lecca, A. Rizzi, and R.P. Serapioni (2017). GREAT: a
gradient-based color-sampling scheme for Retinex. J.
Opt. Soc. Am. A, 34(4):513–522.
Morel, J. M., Petro, A. B., and Sbert, C. (2010). A PDE
formalization of Retinex theory. IEEE Transactions
on Image Processing, 19(11):2825–2837.
Petro, A. B., Sbert, C., and Morel, J.-M. (2014). Multiscale
retinex. Image Processing On Line, pages 71–88.
Ramirez Rivera, A., Byungyong Ryu, and Chae, O.
(2012). Content-aware dark image enhancement
through channel division. IEEE Transactions on Im-
age Processing, 21(9):3967–3980.
Rizzi, A., Algeri, T., Medeghini, G., and Marini, D. (2004).
A proposal for contrast measure in digital images. In
CGIV 2004 - 2nd European Conference on Color in
Graphics, Imaging, and Vision and 6th Int. Sympo-
sium on Multispectral Color Science, pages 187–192,
Aachen.
Rizzi, A. and Bonanomi, C. (2017). Milano retinex family.
Journal of Electronic Imaging, 26(3):031207.
Tsai, C.-M. and Yeh, Z.-M. (2010). Contrast compensation
by fuzzy classification and image illumination analy-
sis for back-lit and front-lit color face images. IEEE
Transactions on Consumer Electronics, 56(3):1570–
1578.
Wang, Q., Fu, X., Zhang, X., and Ding, X. (2016). A fusion-
based method for single backlit image enhancement.
In 2016 IEEE International Conference on Image Pro-
cessing (ICIP), pages 4077–4081.
Wang, S., Zheng, J., Hu, H.-M., and Li, B. (2013). Nat-
uralness preserved enhancement algorithm for non-
uniform illumination images. IEEE Transactions on
Image Processing, 22(9):3538–3548.
Wei, C., Wang, W., Yang, W., and Liu, J. (2018). Deep
retinex decomposition for low-light enhancement. In
BMVC.
Zuiderveld, K. (1994). Contrast limited adaptive histogram
equalization. In Graphics gems IV, pages 474–485.
Academic Press Professional, Inc.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
86
