
Fiducial Points-supported Object Pose Tracking on RGB Images
via Particle Filtering with Heuristic Optimization
Mateusz Majcher and Bogdan Kwolek
AGH University of Science and Technology,
30 Mickiewicza, 30-059 Krakow, Poland
Keywords:
6D Object Pose, Object Segmentation, Pose Tracking.
Abstract:
We present an algorithm for tracking 6D pose of the object in a sequence of RGB images. The images are
acquired by a calibrated camera. A particle filter is utilized to estimate the posterior probability distribution
of the object poses. The probabilistic observation model is built on the projected 3D model onto image and
then matching the rendered object with the segmented object. It is determined using object silhouette and
distance transform-based edge scores. A hypothesis about 6D object pose that is calculated on the basis of
object keypoints and the PnP algorithm is included in the probability distribution. A k-means++ algorithm
is then executed on multi-modal probability distribution to determine modes. A multi-swarm particle swarm
optimization is executed afterwards to find finest modes in the probability distribution together with the best
pose. The object of interest is segmented by an U-Net neural network. Eight fiducial points of the object are
determined by a neural network. A data generator employing 3D object models has been developed to syn-
thesize photorealistic images with ground-truth data for training neural networks both for object segmentation
and estimation of keypoints. The 6D object pose tracker has been evaluated both on synthetic and real images.
We demonstrate experimentally that object pose hypotheses calculated on the basis of fiducial points and the
PnP algorithm lead to considerable improvements in tracking accuracy.
1 INTRODUCTION
It is expected that in the near future, robots will per-
form routine tasks that they are not able to perform
today. Estimating the 6-DoF pose (3D rotations + 3D
translations) of an object with respect to the camera
is crucial to realize such tasks. Delivering robust esti-
mates of the object pose on the basis of RGB images
is a difficult problem. The discussed task has many
important aspects that should be resolved to achieve
robust object grasping, including object classification,
object detection, object tracking, object segmentation
and finally, estimation of the 6D object pose. A lot of
successful researches have been done in these direc-
tions (He et al., 2017; Deng et al., 2019).
The most simple way for camera pose estimation
consists in using squared markers, for instance ArUco
markers (Garrido-Jurado et al., 2014). However, hav-
ing on regard that the marker detection is based on
high contrast edges in the image as well as overall
high intensity contrast between the black and white
areas of the marker, such methods are prone to mo-
tion blur caused by fast marker or camera movement,
mainly due to unsharp or blurred edges (Marchand
et al., 2016). In Perspective-n-Point (PnP) algorithm
(Fischler and Bolles, 1981) the pose of a calibrated
camera is estimated on the basis of a set of 3D points
in the world and their corresponding 2D projections
in the image. However, the correspondence-based ap-
proaches require rich texture features. They calculate
the pose using the PnP and recovered 2D-3D corre-
spondences, often in a RANSAC (Fischler and Bolles,
1981) framework to support outlier rejection. While
PnP algorithms are usually robust when the object is
well textured, they can fail when it is featureless or
when in the scene there are multiple objects occlud-
ing each other.
A large variety of object pose estimation ap-
proaches relying on natural point features have been
proposed in the past, e.g. (Lepetit et al., 2004; Vidal
et al., 2018), to enumerate only some of them. In gen-
eral, features can either encode image properties or be
a result of learning.
Recently, great progress has been made on esti-
mating 6D object pose from the 2D image via deep
learning-based architectures. A first attempt to use
Majcher, M. and Kwolek, B.
Fiducial Points-supported Object Pose Tracking on RGB Images via Particle Filtering with Heuristic Optimization.
DOI: 10.5220/0010237109190926
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
919-926
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
919

a convolutional neural network (CNN) for direct re-
gression of 6DoF object poses was PoseCNN (Xiang
et al., 2018). For example, in (Kehl et al., 2017) the
authors treat the pose estimation as a classification
problem and train neural networks to classify the im-
age features into a discretized pose space. In general,
two main CNN-based approaches to 6D pose object
pose estimation have emerged: either regressing the
6D object pose from the image directly (Xiang et al.,
2018) or predicting 2D key-point locations in the im-
age (Rad and Lepetit, 2017), from which the object
pose can be determined by the PnP algorithm. In (Rad
and Lepetit, 2017) the whole process is divided into
two stages. In the first stage the authors determine
the centres of objects of interest, and afterwards they
use deep neural networks to determine the rotation of
the object. In (Peng et al., 2019), a Pixel-wise Voting
Network (PVNet) to regress pixel-wise unit vectors
pointing to the keypoints and then using these vec-
tors to vote for keypoint locations via RANSAC has
been proposed. Instead of directly regressing image
coordinates of keypoints, their method predicts unit
vectors that represent directions from each pixel of
the object towards the keypoints, then these directions
vote for the keypoints locations based on RANSAC.
There are several publicly available datasets for
benchmarking the performance of algorithms for 6D
object pose estimation, including OccludedLinemod
(Brachmann et al., 2014), YCB-Video (Xiang et al.,
2018). However, the current datasets do not focus
on 6D object tracking using RGB image sequences.
They are mainly designed for single-frame based pose
estimation. The data do not contain distortions (e.g.
motion blur caused by fast object motions) and free-
style object motions, which are common in real-world
scenarios.
In this work we investigate the problem of 6-DOF
object pose estimation and tracking on RGB images
acquired from a calibrated camera. U-Net neural net-
work is used to segment the object of interest. The
segmented object is then fed to a neural network esti-
mating the 2D position of eight fiducial points of the
object. Afterwards, the 6D object pose is estimated
using the PnP algorithm and then used as a pose hy-
pothesis during the pose inference. A particle filter
(PF) combined with a particle swarm optimization
(PSO) is utilized to estimate the posterior probabil-
ity distribution of the object poses as well as the best
pose. The observation model and objective function
are calculated on the basis of the projected 3D model
onto images and then matching the rendered object
with the segmented object. It is determined using
object silhouette and distance transform-based edge
scores. A hypothesis about 6D object pose that is cal-
culated on the basis of eight fiducial keypoints and
the PnP algorithm is included in the probability dis-
tribution of the object poses. A k-means++ algorithm
is then executed on multi-modal probability distribu-
tion. A particle swarm optimization is executed af-
terwards to find the modes in the probability distribu-
tion. The fiducial points of the object are determined
by a neural network. A data generator employing 3D
object models has been developed to synthesize pho-
torealistic images with ground-truth data for training
neural networks both for object segmentation and es-
timation of keypoints. The 6D object pose tracker
has been evaluated both on synthetic and real images
with six objects. In order to capture real images each
of six objects has been placed on top of an electric
turntable and then captured from four camera eleva-
tions. We demonstrate experimentally that object hy-
potheses calculated on the basis of fiducial points and
the PnP algorithm permit achieving considerable im-
provements in tracking accuracies.
2 OBJECT SEGMENTATION
The architecture of neural network for object seg-
mentation has been based on the U-Net (Ronneberger
et al., 2015). The architecture of U-Net resembles the
letter U, which is why it is called so. In such networks
we can distinguish a contracting path (encoding) path
and an expansive (decoding) path. In the contraction
path, each block consists of a series of 3×3 convo-
lution layers followed by a 2×2 max pooling, where
the number of cores after each block doubles. A char-
acteristic feature of the U-Net architecture is the ex-
pansive path, which also, by analogy with the con-
tracting path, consists of several expansion blocks.
In this path, the 2×2 max pooling is replaced by a
2×2 upsampling layer. Each step in the expanding
path consists of the upsampling operation followed
by a 2×2 convolution, combining with an appropri-
ately cropped property map, and this is completed
by two 3×3 convolutions, followed by ReLU. Skip
connections used in U-Net directly connects the fea-
ture maps between encoder and decoder. The neural
network was trained on RGB images. To reduce the
training time, prevent overfitting and to increase per-
formance of the U-Net we added Batch Normalization
(BN) (Ioffe and Szegedy, 2015) after each Conv2D.
As it improves gradient flow through the network, it
reduces dependence on initialization and higher learn-
ing rates are achieved. Data augmentation has also
been applied during the network training. The pixel-
wise cross-entropy has been used as the loss function.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
920

3 6D OBJECT POSE
ESTIMATION
The 6D pose is estimated using a CNN, which deliv-
ers 2D locations of eight fiducial points of the object.
The 2D locations of such points are then fed to a PnP
algorithm, that delivers the 6D pose of the object. A
segmented image of size 128×128 pixels is delivered
from the U-Net CNN to the fiducial CNN as input,
which determines 2D locations of eight keypoints.
Figure 1 shows a schematic architecture of fiducial
CNN. The network architecture has been designed in
such a way as to obtain, on the one hand, sufficient
precision in the estimation of the position of keypoints
in the images, and on the other hand, to avoid intro-
ducing unnecessary delays in the estimation of the
position of the points during the pose tracking. The
first part consists of 2 blocks, where each one con-
tains convolutional layer with 3×3 kernels, followed
by max-pooling with kernel of size 2×2, respectively.
The layers are completed by the batch normalization
and ReLU activation function. The next part con-
sists of 3 consecutive convolutional layers with 3×3
kernels followed by max-pooling with kernel of size
2×2. In the MLP part, in the first two layers there
are 512 neurons in each layer, and in the last there are
16 neurons that deliver the positions of 8 pairs of key-
points of the object. The loss function was mean abso-
lute error (MAE). This network is a result of several
experiments aiming at finding possibly small neural
network, while still achieving pose estimates with ac-
curacy sufficient for object grasping. For each object
a separate network has been trained. Given class in-
formation determined by segmentation networks like
mask-RCNN (He et al., 2017), the network for pose
estimation can be selected automatically.
Figure 1: Neural network for estimation of fiducial points.
The discussed neural network requires input im-
ages of size 128 × 128 with the segmented object of
interest. During pose tracking a ROI containing the
object can be extracted easily using information from
the previous frame and then scaled to desirable size.
3.1 PF-PSO with PnP-based Hypotheses
The algorithm extends the algorithm for 6D pose
tracking (Majcher and Kwolek, 2020), which com-
bines particle filtering and particle swarm optimiza-
tion as well as effectively utilizes the k-means++
(Arthur and Vassilvitskii, 2007) for better dealing
with multimodal distributions. Given the particle
set representing the posterior probability distribu-
tion in the previous frame, the particles are propa-
gated according to a probabilistic motion model, the
pose likelihoods on the basis of probabilistic observa-
tion model are calculated, and afterwards the particle
weights are determined and a resampling is executed,
see also Fig. 2, as in ordinary particle filters. A par-
ticle with a small weight is replaced in such a resam-
pled particle set by a particle with pose determined on
the basis of keypoints and the PnP algorithm, see line
#2 in below pseudo-code. Next, samples are clustered
using k-means++ algorithm (Arthur and Vassilvitskii,
2007), which applies a sequentially random selection
strategy according to a squared distance from the clos-
est center already selected. Afterwards, a two-swarm
PSO is executed to find the modes in the probability
distribution. The number of the iterations executed by
the PSO is set to three. Next, ten best particles are se-
lected to form a sub-swarm, see lines #6-7 in below
pseudo-code. Twenty iterations are executed by such
a sub-swarm to find better particle positions. The best
global position returned by the discussed sub-swarm
is used in visualization of the best pose. Finally, an
estimate of the probability distribution is calculated
by replacing the particle positions determined by the
PF with corresponding particle positions, which were
selected to represent the modes in the probability dis-
tribution, see lines #6-7, and particles refined by the
sub-swarm, see line #9. The initial probability distri-
bution is updated by ten particles with better positions
found by the PSO algorithms and ten particles with
better positions found by the sub-swarm, see lines
#9-11. The probabilistic motion model, observation
model and objective function in the PSO are the same
as in (Majcher and Kwolek, 2020).
1 function select(n best, X)
2 X
sorted
= quicksort(X) using f ()
3 return X
sorted
[1. .. n best]
1 X
t
= PF(X
t−1
)
2 x
PnP
t
= PnP(), replace worst x ∈ X
t
with x
PnP
t
3 X
c1
t
,X
c2
t
= k-means++(X
t
)
4 ∼,X
c1
t
= PSO(X
c1
t
,3)
5 ∼,X
c2
t
= PSO(X
c2
t
,3)
6 X
c1 best
t
= select(5,X
c1
t
)
7 X
c2 best
t
= select(5,X
c2
t
)
8 X
best
t
= X
c1 best
t
S
X
c2 best
t
9 g
best
,X
best
t
= PSO(X
best
t
,20)
10 substitute 5 x ∈ X
t
with corresp. x ∈ X
c1 best
t
11 substitute 5 x ∈ X
t
with corresp. x ∈ X
c2 best
t
13 substitute 10 x ∈ X
t
with corresp. x ∈ X
best
t
14 return g
best
,X
t
Fiducial Points-supported Object Pose Tracking on RGB Images via Particle Filtering with Heuristic Optimization
921
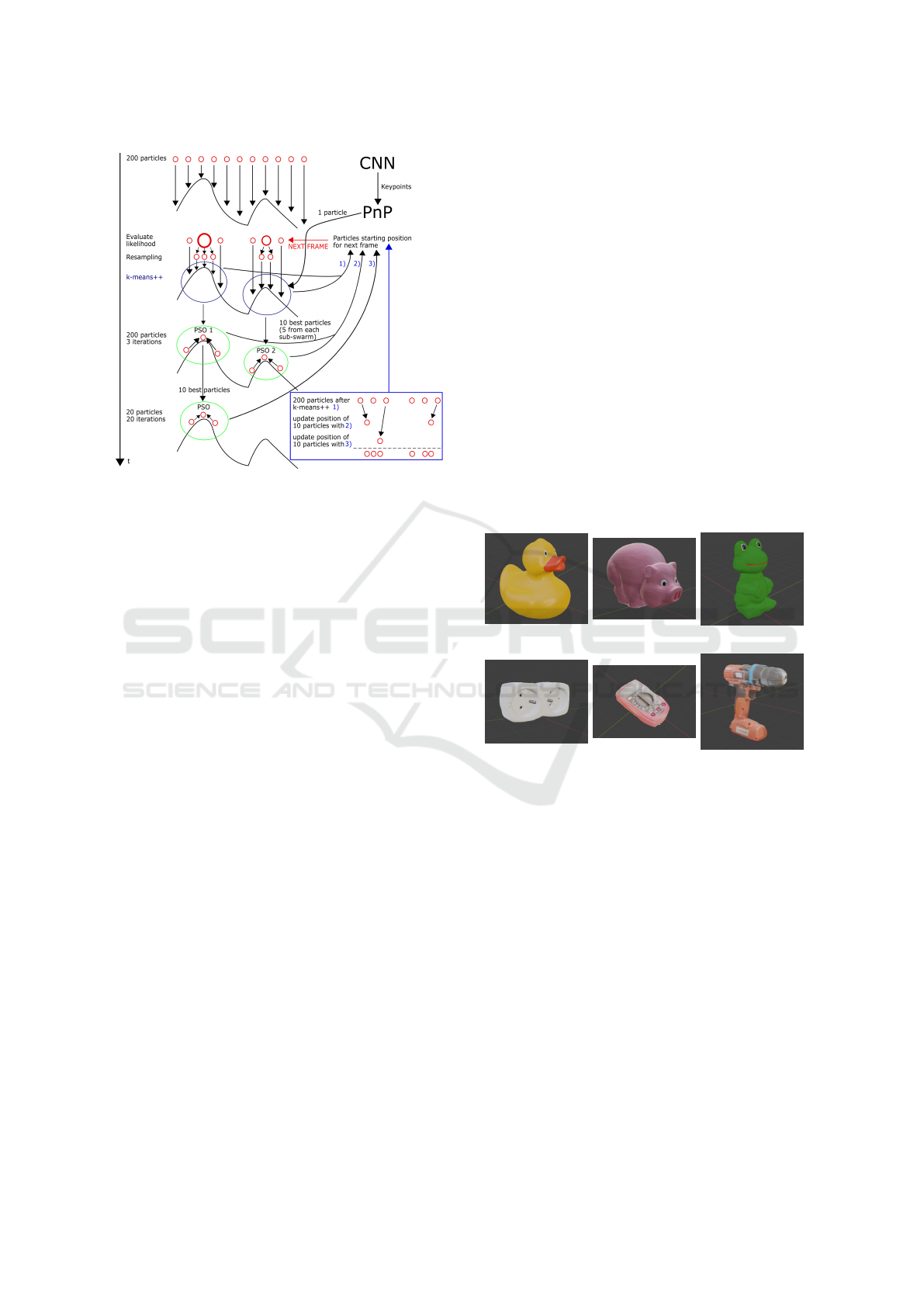
Figure 2: PF-PSO supported with pose hypotheses, which
are determined on the basis of keypoints and the PnP.
4 DATASET
To evaluate and compare pose estimation algorithms,
a number of benchmark datasets have been pro-
posed, including: Linemod (Hinterstoisser et al.,
2013), Linemod-Occluded (Brachmann et al., 2014),
T-LESS (Hodan et al., 2017), YCB-Video (Xiang
et al., 2018), HomebrewedDB (Kaskman et al., 2019).
The datasets are mainly designed for single-frame
based pose estimation. They do not contain distor-
tions (e.g. motion blur caused by fast object mo-
tions) and free-style object motions, which are im-
portant for experiments and performance evaluation
in real-world scenarios. A recently proposed dataset
(Wu et al., 2017) has been designed for pose track-
ing and addresses issues mentioned above. In partic-
ular, it contains binary masks for real objects. How-
ever, this dataset has not been designed for algorithms
based on deep learning. For instance, it does not con-
tain keypoints data and therefore neural networks for
6D pose estimation on the basis of keypoints (Zhao
et al., 2018) can not be trained. Moreover, in 3D
object sub-dataset only objects generated by a 3D
printer are available. This means that it does not per-
mit a comparison of results obtained for frequently
used objects in popular datasets, like power drill from
YCB-Video dataset. This motivated us to utilize an
extended dataset for 6D object tracking (Lopatin and
Kwolek, 2020).
Our dataset contains six objects: drill, multime-
ter, electrical extension, duck, frog and piggy. The
extension, duck, frog, and piggy are texture-less or
almost texture-less. 3D models of the objects were
prepared manually using Blender, which is a 3D com-
puter graphics software toolset (Blender Online Com-
munity, 2020). The diameter of the first object is
228 mm and the 3D model consists 417777 vertices,
the diameter of the second object is 138 mm and 3D
model contains 119273 vertices, the diameter of third
object is 103 mm and 3D model contains 216233 ver-
tices, the diameter of the fourth object is 117 mm
and 3D model contains 140148 vertices, the diame-
ter of the fifth object is 108 mm and 3D model con-
tains 135072 vertices, and the diameter of the sixth
object is equal to 116 mm and its 3D model con-
sists of 132620 vertices. The 3D models of the ob-
jects have been designed using 2.81 software version
of Blender. Figure 3 depicts rendered images, which
were obtained on the basis of our 3D models. The
images were rendered using Python scripts (Lopatin
and Kwolek, 2020) with Blender’s engine support. As
we can observe, our 3D models permit photo-realistic
rendering of the objects in the requested poses.
(a) Duck
(b) Piggy
(c) Frog
(d) Extension
(e) Multimeter
(f) Power drill
Figure 3: Samples of real images.
We generated images for training neural networks
both for object segmentation/detection and tracking.
For object detection and object segmentation the ob-
ject masks are stored both in images with binary
masks as well as .json files, which are compatible with
coco data format (Lin et al., 2014). The binary masks
are stored in .png images with alpha (transparency)
channel. The .jsn files contain also 3D positions of
eight fiducial points. Even if a fiducial point is oc-
cluded, it is generated on the image. Thus, the num-
ber of fiducial points is constant despite occlusions
or self-occlusions. This means that neural networks
like mask-RCNN can be trained easily not only for
object detection or segmentation, but also after small
modification of the code for estimation of position of
fiducial points on the RGB images. The information
about 6D pose of the objects is also stored in the .json
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
922

files. It is worth noting that popular datasets for 6D
object pose estimation do not contain data on object
keypoints, i.e. fiducial points of the objects, and usu-
ally contain only information on the 3D positions of
the rectangular corners describing the object of inter-
est, and thus automatically determined from the posi-
tion of the camera or ArUco markers. The tracking
sub-dataset contains images with three types of mo-
tion: (i) object moves from left to right and then from
right to left, (ii) object moves and simultaneously ro-
tates from 0 . . . 180
◦
and then makes full rotation and
(iii) object moves, simultaneously rotates and changes
distance to the camera.
In addition to the synthetic data mentioned above,
the dataset contains also real data. The camera has
been calibrated using the OpenCV library (Bradski
and Kaehler, 2013). The ground truths of the object
poses have been determined using measurements pro-
vided by a turntable. Each object has been observed
from four different camera views, see Fig. 4. The
objects were rotated in range 0
◦
.. .360
◦
. During ob-
ject rotation, every ten degrees an image has been ac-
quired with corresponding rotation angle. This means
that for each object the number of images acquired in
such a way is equal to 144.
Figure 4: Camera setting.
For training the object segmentation models the
objects were rotated and observed by the camera from
different views. For each considered object, 150 im-
ages with manual delineations of the objects (Lopatin
and Kwolek, 2020) were prepared and stored in the
dataset. Additionally, 2D locations of fiducial points
are stored in corresponding files. This subset con-
sisting of real RGB images with the corresponding
ground truth data can be employed for training as well
as evaluation of neural networks for 6D object pose
estimation and tracking. The data are stored in the
format that is identical with data format utilized in the
synthetic subset.
5 EXPERIMENTAL RESULTS
At the beginning of this Section we discuss evaluation
metric for 6D pose estimation, Afterwards, we present
experimental results.
5.1 Evaluation Metric for 6D Pose
Estimation
We evaluated the quality of 6-DoF object pose esti-
mation using ADD score (Average Distance of Model
Points) (Hinterstoisser et al., 2013). ADD is defined
as average Euclidean distance between model vertices
transformed using the estimated pose and the ground
truth pose. This means that it expresses the average
distance between the 3D points transformed using the
estimated pose and those obtained with the ground-
truth one. It is defined as follows:
ADD = avg
x∈M
||(Rx + t) − (
ˆ
Rx +
ˆ
t)||
2
(1)
where M is a set of 3D object model points, t and R
are the translation and rotation of a ground truth trans-
formation, respectively, whereas
ˆ
t and
ˆ
R correspond
to those of the estimated transformation. This means
that it expresses the average distance between the 3D
points transformed using the estimated pose and those
obtained with the ground-truth one. The pose is con-
sidered to be correct if average distance e is less than
k
e
d, where d is the diameter (i.e., the largest distance
between vertices) of M and k
e
is a pre-defined thresh-
old (normally it is set to ten percent).
We determined also the rotation error on the basis
of the following formula:
err
rot
= arccos((Tr(
ˆ
RR
−1
) − 1)/2) (2)
where Tr stands for matrix trace,
ˆ
R and R denote ro-
tation matrixes corresponding to ground-truth and es-
timated poses, respectively.
5.2 Evaluation of Pose Tracking
At the beginning we evaluated a basic version of the
algorithm (Majcher and Kwolek, 2020), i.e. without
PnP-based hypotheses to support PF-PSO on freely
available OPT benchmark dataset (Wu et al., 2017),
which has been recorded for tracking of 6D pose
of the objects. In discussed dataset the image se-
quences were recorded under various lighting con-
ditions, different motion patterns and speeds using
a programmable robotic arm. Table 1 presents the
tracking scores achieved in 6D pose tracking of House
and Ironman objects in FreeMotion scenario.
Fiducial Points-supported Object Pose Tracking on RGB Images via Particle Filtering with Heuristic Optimization
923
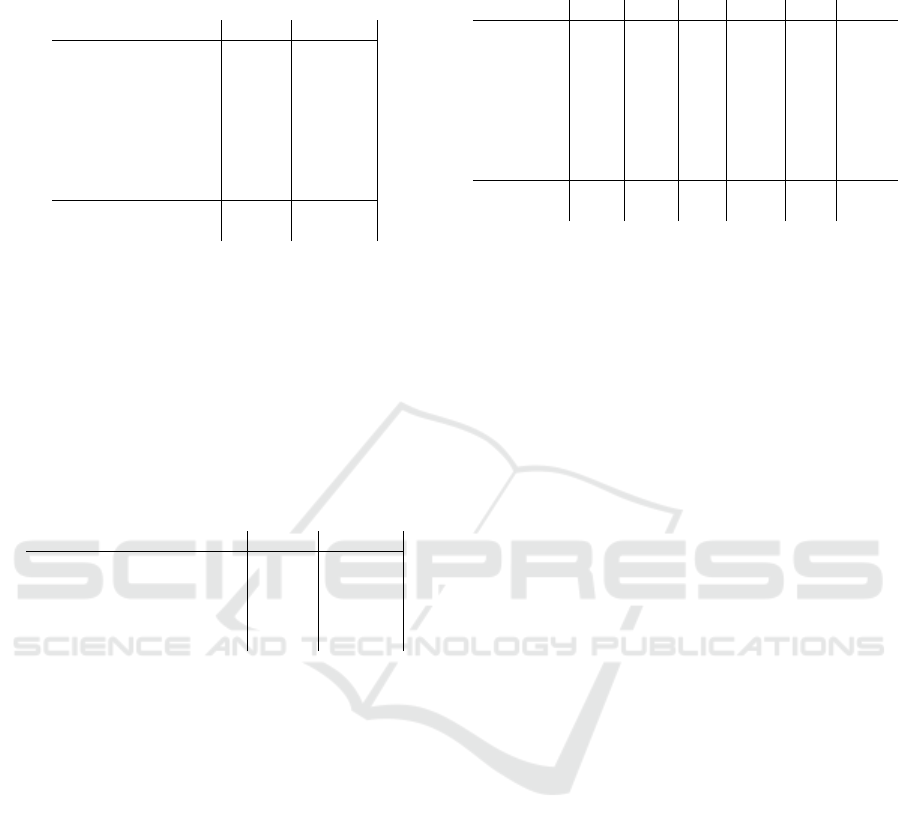
Table 1: Tracking scores [%] achieved by basic version of
our algorithm in tracking 6D pose of House and Ironman in
FreeMotion scenario.
tracking score [%] House Ironman
Behind, ADD 10% 88 41
Behind, ADD 20% 100 66
Left, ADD 10% 82 32
Left, ADD 20% 98 61
Right, ADD 10% 60 51
Right, ADD 20% 86 83
Front, ADD 10% 56 28
Front, ADD 20% 89 51
Average, ADD 10% 72 38
Average, ADD 20% 93 65
Table 2 contains AUC scores achieved by recent
methods in 6D pose tracking of House and Iron-
man objects in FreeMotion scenario. As we can ob-
serve, our algorithm in basic version achieves better
results in comparison to results achieved by PWP3D,
UDP and ElasticFusion. In comparison to results in
(Bugaev et al., 2018) it achieves slightly worse results
on House object and worse results on the Ironman.
Table 2: AUC scores achieved in tracking 6D pose of House
and Ironman in FreeMotion scenario, compared to results
achieved by recent methods.
AUC score [%] House Ironman
(Prisacariu and Reid, 2012) 3.58 3.92
(Brachmann et al., 2016) 6.04 5.16
(Whelan et al., 2016) 2.83 1.75
(Bugaev et al., 2018) 14.48 14.71
Our method 12.12 5.16
Since the OPT benchmark dataset does not con-
tain enough data to train and evaluate of neural net-
works for fiducial point estimation, we conducted ex-
periments on our dataset. For evaluation of 6D pose
tracking we selected the sequences #2 in which the
objects move from left to right, simultaneously make
rotations from 0 to 180
◦
, and after reaching the right
side of the image, the objects move back from right
to left, simultaneously make full rotation about axis.
The training of neural networks both for object seg-
mentation/detection and 6D pose estimation was done
on synthetic images only. Table 3 presents experi-
mental results that were obtained by our algorithm.
Table 4 compares results achieved by our algo-
rithm with and without the PnP algorithm. As we
can observe, thanks to employing in the PF-PSO al-
gorithm an additional information about object poses,
far better tracking scores can be achieved for all con-
sidered objects.
Figure 5 depicts ADD scores over time that were
obtained by the PF-PSO with neural network esti-
mating position of fiducial points and the PnP algo-
rithm. As we can observe, slightly bigger errors were
Table 3: Tracking scores [%] achieved by our algorithm in
tracking 6D pose of objects.
^,ADD [%] drill frog pig duck ext. mult.
0
◦
, 10 84 67 48 58 15 17
0
◦
, 20 93 78 73 90 22 28
30
◦
, 10 77 76 49 86 63 72
30
◦
, 20 96 93 77 90 83 91
60
◦
, 10 67 63 61 83 65 73
60
◦
, 20 94 78 87 87 90 99
90
◦
, 10 50 35 42 91 80 87
90
◦
, 20 75 53 71 99 98 100
Av., 10 69 60 50 79 56 62
Ave, 20 89 75 77 91 73 80
achieved for 0
◦
camera view. In discussed camera
view the pose tracking was done using side-view im-
ages of the objects.
Figure 6 depicts rotation errors over time on real
images, which have been obtained by the PF-PSO
with neural network estimating 2D location of fidu-
cial points and the PnP algorithm. As we can ob-
serve, the largest errors were obtained for the ex-
tension, which is symmetric and texture-less object.
Somewhat larger errors were observed for 30
◦
cam-
era view.
In order to segment the House and Ironman ob-
jects we trained a single U-Net on 660 images from
the OPT benchmark. A single U-Net has been trained
on 1800 images in order to segment all six objects
from our dataset. The Dice scores were higher than
95% for all objects. The neural networks for estima-
tion of positions of keypoints were trained on 300 im-
ages and evaluated on 50 images.
The complete system for 6D pose estimation has
been implemented in Python and Keras framework.
On the basis of keypoint positions the object poses
were calculated using solvePnPRansac (Lepetit et al.,
2009) from OpenCV library. The system runs on an
ordinary PC with a CPU/GPU. On PC equipped with
i5-8300H CPU 2.30 GHz the segmentation time us-
ing U-Net is about 0.3 sec., whereas the 6D pose is
estimated in about 0.03 sec. About ten times short-
ening of time has been observed on TitanX graph-
ics card. Initial experiments conducted with Franka-
Emika robot, which has been equipped with Xtion
RGB-D sensor demonstrated usefulness of the pro-
posed approach to estimation of 6D pose of objects
held in hand. The images for training and evaluating
the segmentation algorithm as well as extracted ob-
jects with corresponding ground-truth for evaluating
the 6D object pose tracking are freely available for
download at: http://agh.edu.pl/
∼
bkw/src/pose6d.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
924
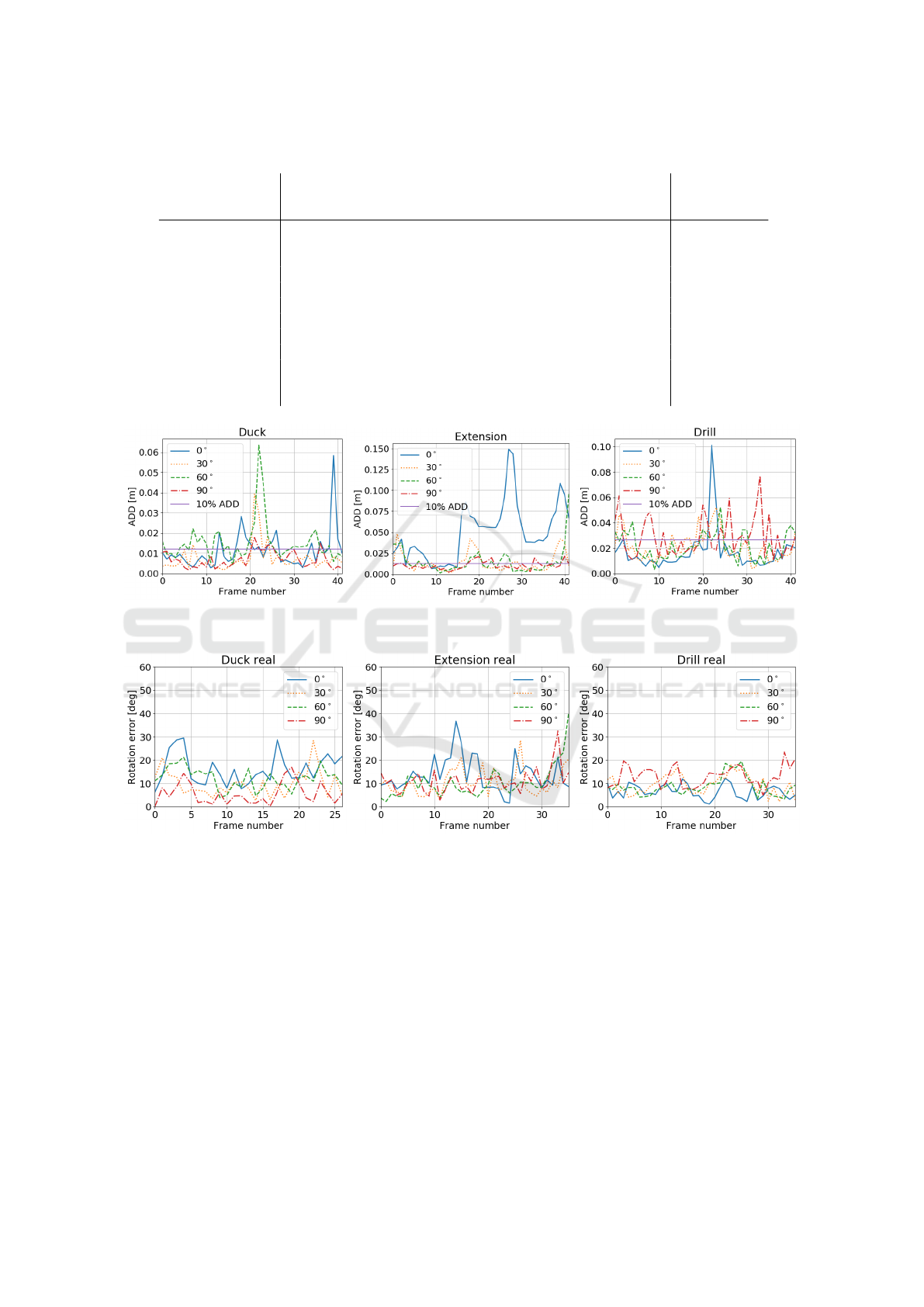
Table 4: Tracking scores [%] achieved by our algorithm with and without PnP.
tracking score [%]
0
◦
,
ADD
10%
0
◦
,
ADD
20%
30
◦
,
ADD
10%
30
◦
,
ADD
20%
60
◦
,
ADD
10%
60
◦
,
ADD
20%
90
◦
,
ADD
10%
90
◦
,
ADD
20%
Avg.,
ADD
10%
Avg,
ADD
20%
drill w/o PnP 79 88 60 86 54 74 31 59 56 77
drill with PnP 84 93 77 96 67 94 50 75 69 89
frog w/o PnP 31 33 33 37 37 49 12 24 28 36
frog with PnP 67 78 76 93 63 78 35 53 60 75
pig w/o PnP 50 63 44 49 51 59 48 52 48 56
pig with PnP 48 73 49 77 61 87 85 88 61 81
duck w/o PnP 41 71 76 79 61 78 82 100 65 82
duck with PnP 58 90 86 90 83 87 91 99 79 91
ext. w/o PnP 18 33 55 82 52 73 70 100 49 72
ext. with PnP 15 22 63 83 65 90 80 98 56 73
mult. w/o PnP 1 7 61 93 67 96 77 88 51 71
mult. with PnP 17 28 72 91 73 99 87 100 62 80
Figure 5: ADD scores over time for images from sequence #2, obtained by PF-PSO and neural network estimating 2D location
of fiducial points and PnP algorithm (plots best viewed in color).
Figure 6: Rotation errors over time for real images, obtained by PF-PSO using poses that were obtained by the PnP algorithm.
6 CONCLUSIONS
In this paper, a framework for tracking 6D pose of the
object in a sequence of RGB images has been pro-
posed. In this segmentation-driven approach the ob-
ject of interest is delineated by a single U-net neural
network, trained to segment a set of considered ob-
jects. A basic PF-PSO algorithm has been evaluated
on freely available OPT benchmark dataset for track-
ing 6D pose of objects. Promising results were ob-
tained on discussed dataset. This basic algorithm has
been extended by including in the probability distri-
bution maintained by the PF-PSO a hypothesis about
6D object pose. Such a hypothesis about the object
pose is calculated on the basis of object keypoints
and the PnP algorithm. The location of fiducial key-
points on images is determined by a neural network,
trained separately for each object. The evaluations
were done on our dataset that contains both real and
synthesized images of six texture-less objects and has
been recorded to perform tracking of 6D object pose
on RGB images. A separate neural network has been
trained to segment all considered objects. Thanks to
3D location of fiducial points on synthetic objects and
Fiducial Points-supported Object Pose Tracking on RGB Images via Particle Filtering with Heuristic Optimization
925

2D location of such points on real images, various
keypoint-based deep neural network can be trained
for object pose estimation in end-to-end framework.
ACKNOWLEDGEMENTS
This work was supported by Polish National
Science Center (NCN) under a research grant
2017/27/B/ST6/01743.
REFERENCES
Arthur, D. and Vassilvitskii, S. (2007). K-means++: The
Advantages of Careful Seeding. In Proc. ACM-SIAM
Symp. on Discrete Algorithms, pages 1027–1035.
Blender Online Community (2020). Blender - a 3D mod-
elling and rendering package. Blender Foundation,
Stichting Blender Foundation, Amsterdam.
Brachmann, E., Krull, A., Michel, F., Gumhold, S., Shotton,
J., and Rother, C. (2014). Learning 6D object pose es-
timation using 3D object coordinates. In ECCV, pages
536–551. Springer.
Brachmann, E., Michel, F., Krull, A., Yang, M., Gumhold,
S., and Rother, C. (2016). Uncertainty-driven 6D pose
estimation of objects and scenes from a single RGB
image. In CVPR, pages 3364–3372.
Bradski, G. and Kaehler, A. (2013). Learning OpenCV:
Computer Vision in C++ with the OpenCV Library.
O’Reilly Media, Inc., 2nd edition.
Bugaev, B., Kryshchenko, A., and Belov, R. (2018). Com-
bining 3D model contour energy and keypoints for ob-
ject tracking. In ECCV, pages 55–70, Cham. Springer.
Deng, X., Mousavian, A., Xiang, Y., Xia, F., Bretl, T., and
Fox, D. (2019). PoseRBPF: A Rao-Blackwellized
Particle Filter for 6D Object Pose Tracking. In
Robotics: Science and Systems (RSS).
Fischler, M. A. and Bolles, R. C. (1981). Random Sample
Consensus: A Paradigm for Model Fitting with Ap-
plications to Image Analysis and Automated Cartog-
raphy. Commun. ACM, 24(6):381–395.
Garrido-Jurado, S., Munoz-Salinas, R., Madrid-Cuevas,
J. J., Mar
´
ın-Jimenez, M. J. (2014). Automatic gener-
ation and detection of highly reliable fiducial markers
under occlusion. Pattern Rec., 47(6):2280–2292.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2017).
Mask R-CNN. In IEEE Int. Conf. on Computer Vision
(ICCV), pages 2980–2988.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Bradski,
G., Konolige, K., and Navab, N. (2013). Model based
training, detection and pose estimation of texture-less
3D objects in heavily cluttered scenes. In Computer
Vision – ACCV 2012, pages 548–562. Springer.
Hodan, T., Haluza, P., Obdrzalek, S., Matas, J., Lourakis,
M., and Zabulis, X. (2017). T-LESS: An RGB-D
dataset for 6D pose estimation of texture-less objects.
In WACV, pages 880–888.
Ioffe, S. and Szegedy, C. (2015). Batch Normalization: Ac-
celerating deep network training by reducing internal
covariate shift. In ICML - vol. 37, pages 448–456.
Kaskman, R., Zakharov, S., Shugurov, I., and Ilic, S.
(2019). HomebrewedDB: RGB-D dataset for 6D pose
estimation of 3D objects. In IEEE Int. Conf. on Com-
puter Vision Workshop (ICCVW), pages 2767–2776.
Kehl, W., Manhardt, F., Tombari, F., Ilic, S., and Navab, N.
(2017). SSD-6D: Making RGB-Based 3D Detection
and 6D Pose Estimation Great Again. In IEEE Int.
Conf. on Computer Vision, pages 1530–1538.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). EPnP:
An accurate O(n) solution to the PnP problem. Int. J.
Comput. Vision, 81(2):155–166.
Lepetit, V., Pilet, J., and Fua, P. (2004). Point matching as a
classification problem for fast and robust object pose
estimation. In CVPR, pages 244–250.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Dollar, P., and Zitnick, C. L. (2014).
Microsoft COCO: Common Objects in Context. In
ECCV, pages 740–755. Springer.
Lopatin, V. and Kwolek, B. (2020). 6D pose estimation of
texture-less objects on RGB images using CNNs. In
The 19th Int. Conf. on Artificial Intelligence and Soft
Computing, pages 180–192. Springer.
Majcher, M. and Kwolek, B. (2020). 3D Model-Based 6D
Object Pose Tracking on RGB Images Using Particle
Filtering and Heuristic Optimization. In 15th Int. The
Int. Conf. on Computer Vision Theory and Applica-
tions (VISAPP), pages 690–697, vol. 5. SciTePress.
Marchand, E., Uchiyama, H., and Spindler, F. (2016).
Pose estimation for augmented reality: A hands-on
survey. IEEE Trans. on Vis. and Comp. Graphics,
22(12):2633–2651.
Peng, S., Liu, Y., Huang, Q., Zhou, X., and Bao, H. (2019).
PVNet: Pixel-Wise Voting Network for 6DoF Pose
Estimation. In IEEE Conf. on Comp. Vision and Patt.
Rec., pages 4556–4565.
Prisacariu, V. A. and Reid, I. D. (2012). PWP3D: Real-
Time Segmentation and Tracking of 3D Objects. Int.
J. Comput. Vision, 98(3):335–354.
Rad, M. and Lepetit, V. (2017). BB8: A scalable, accurate,
robust to partial occlusion method for predicting the
3D poses of challenging objects without using depth.
In IEEE Int. Conf. on Comp. Vision, pages 3848–3856.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
Net: Convolutional networks for biomedical image
segmentation. In MICCAI, pages 234–241. Springer.
(Vidal), J., (Lin), C., and (Mart
´
ı), R. (2018). 6D pose esti-
mation using an improved method based on point pair
features. In Int. Conf. on Control, Automation and
Robotics, pages 405–409.
Whelan, T., Salas-Moreno, R. F., Glocker, B., Davison,
A. J., and Leutenegger, S. (2016). ElasticFusion. Int.
J. Rob. Res., 35(14):1697–1716.
Wu, P., Lee, Y., Tseng, H., Ho, H., Yang, M., and Chien,
S. (2017). A benchmark dataset for 6DoF object pose
tracking. In IEEE Int. Symp. on Mixed and Aug. Real-
ity, pages 186–191.
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2018).
PoseCNN: A Convolutional Neural Network for 6D
Object Pose Estimation in Cluttered Scenes. In
IEEE/RSJ Int. Conf. on Intel. Robots and Systems.
Zhao, Z., Peng, G., Wang, H., Fang, H., Li, C., and Lu,
C. (2018). Estimating 6D pose from localizing desig-
nated surface keypoints. ArXiv, abs/1812.01387.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
926
