
Non-Maximum Suppression for Unknown Class Objects
using Image Similarity
Yoshiaki Homma
1
, Toshiki Kikuchi
1
and Yuko Ozasa
2
1
Faculty of Science and Technology, Keio University, Kanagawa, Japan
2
School of System Design and Technology, Tokyo Denki University, Tokyo, Japan
Keywords:
Object Detection, Unknown Class, Non-Maximum Suppression.
Abstract:
As a post-processing step for object detection, non-maximum suppression (NMS) has been widely used for
many years. Greedy-NMS, which is one of the most widely used NMS methods, is effective if the class of
objects is known but not if the class of objects is unknown. To overcome this drawback, we propose an NMS
method using an image similarity index that is independent of learning. Even if the overlap of bounding boxes
that locate different objects is large, they are considered to have located different objects if the similarity of
the images in the bounding boxes is low. In order to evaluate the proposed method, we built a new dataset
containing unknown class objects. Our experimental results show that the proposed method can reduce the
rate of undetected unknown class objects when using greedy-NMS.
1 INTRODUCTION
Object detection is a fundamental problem in com-
puter vision in which an algorithm generates bound-
ing boxes and assigns them classification scores. Ide-
ally, one bounding box should be output for each ob-
ject. However, in practice, it is often the case that
more than one bounding box is output to a single
object. Therefore, in order to remove the redundant
bounding boxes, many object detection methods use
the post-processing called Non-Maximum Suppres-
sion (NMS) (Redmon et al., 2015; Girshick, 2015;
Ren et al., 2015) .
In greedy-NMS, which is one of the most widely
used NMS methods, the intersection over union (IoU)
of bounding boxes is calculated for each class, and
the bounding boxes are considered to have located the
same object when the IoU is greater than a threshold.
The classes are the object classes in the dataset used to
train the object detector (i.e., classes that are known to
the object detector). If an image in which an unknown
class object appears is input to the object detector, the
unknown class object will be detected as the object
of one of the known classes. Therefore, when an un-
known class object is occluded by another object, it is
assumed that they will be detected as the same known
class objects and may be regarded as duplicate detec-
tions because greedy-NMS determines whether or not
two different objects have been located only by using
the objects’ IoU.
While most object detection methods (Redmon
et al., 2015; Girshick, 2015; Ren et al., 2015) do not
take unknown class objects into account, some stud-
ies have, as they required the detection of unknown
class objects, such as the acquisition of knowledge of
unknown class objects. In such studies, it is detrimen-
tal for the NMS to mistakenly remove unknown class
objects from the detection results.
To overcome the drawback of greedy-NMS, we
propose a NMS method using an image similarity in-
dex. Even if an unknown class object is occluded
by another object and they are classified as the same
known class, they can be regarded as different objects
if their image similarity index is low. To evaluate the
ability of our method to detect unknown class objects,
we constructed a new dataset in which unknown class
objects appear. Our experiment shows that the pro-
posed methods can reduce the number of unknown
class objects mistakenly removed by NMS.
2 RELATED WORK
2.1 Object Detection
With the development of convolutional neural net-
works (CNNs), object detection methods have made
444
Homma, Y., Kikuchi, T. and Ozasa, Y.
Non-Maximum Suppression for Unknown Class Objects using Image Similarity.
DOI: 10.5220/0010240304440449
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
444-449
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved

great progress. Most CNN-based object detectors can
be categorized into two-stage (Girshick, 2015; Ren
et al., 2015; Cai and Vasconcelos, 2018) and one-
stage detectors (Redmon et al., 2015; Liu et al., 2016;
Lin et al., 2017b). Two-stage detectors first generate a
sparse set of candidate object boxes, each called a re-
gion of interest (RoI), using a region-proposal method
like selective search (Uijlings et al., 2013), RPN (Ren
et al., 2015), and then the RoIs are classified and re-
gressed to refine their localizations. The main advan-
tages of two-stage detectors is high localization and
classification accuracy. In contrast to two-stage detec-
tors, one-stage detectors predict bounding boxes from
the input images directly without the region proposal-
step. The main advantage of one-stage detectors is
their inference speed, which is due to their high com-
putational efficiency.
While there are some differences between the de-
tection process of two-stage and one-stage detectors,
the result is the same in that the detectors generate
a large number of candidate object boxes and clas-
sify and refine their localization. Since the object de-
tection methods generate a large number of candidate
object boxes compared to the true number of objects
appearing in the image, duplicate bounding boxes are
often given for a single object. In order to remove
the duplicate bounding boxes, most object detection
methods use NMS post-processing. Although there
are some object detection methods, such as Center-
Net (Zhou et al., 2019), that do not necessarily require
NMS, they are few, and even these are more accurate
with NMS than without. Therefore, NMS is a funda-
mental component in object detection.
2.2 Non-Maximum Suppression
In greedy-NMS the intersection over union (IoU) of
bounding boxes is calculated for each class, and the
bounding boxes are considered to have located the
same object when the IoU is greater than a thresh-
old. Therefore, when bounding boxes classified as
the same class overlap, they may be identified as
duplicate detections, even though they actually lo-
cate the different objects, because greedy-NMS de-
termines whether they locate the same object only by
the IoU of the objects.
To solve this problem, several modified versions
of NMS methods have been proposed. Instead of
directly removing the highly overlapped bounding
boxes, soft-NMS (Bodla et al., 2017) decreases the
classification scores of the less confident bounding
boxes according to their IoU with the most confident
one. However, when the overlap of objects is large,
the classification score is very small, so this is not
effective in situations where occlusion is severe. In
addition, unknown class objects are detected as one
of the known class objects, and the score of the clas-
sification is likely to be small. In this situation, the
unknown class object is more likely to be removed,
even when the overlap is not large. R2NMS (Huang
et al., 2020) estimates the visible bounding boxes,
each of which encloses only the visible part of the ob-
ject, in addition to full bounding boxes, each of which
encloses the entire object, and the IoU of the visi-
ble bounding boxes is used to determine whether the
bounding boxes locate the same object. While using
the visible bounding boxes of objects, which have a
smaller IoU even when the overlap of objects is large,
can reduce the number of objects undetected by NMS,
an additional annotation is required for training.
Some studies have proposed the use of neural net-
works with NMS. In addition to the IoU of the bound-
ing boxes, pairwise-NMS (Liu et al., 2019) uses the
L1 distance of the feature vectors of the RoIs cor-
responding to the bounding boxes. If the overlap of
the bounding boxes and the L1 distance of the feature
vectors of the bounding boxes are both large, they can
be considered to have located different objects. How-
ever, the features extracted by CNNs are task depen-
dent. Features extracted by CNNs trained to estimate
whether two bounding boxes locate the same object
using data consisting of only known classes objects
are not expected to be effective for unknown class
objects; this is the case with pairwise-NMS. Gnet
(Hosang et al., 2017) attempts to learn a deep neural
network to perform NMS using only bounding boxes
and their scores as input. However, because the clas-
sification score of unknown class objects is likely to
be low, this is sometimes not effective for scenes in
which unknown class objects appear.
Our proposed method only uses learning inde-
pendent features. Therefore, it does not depend on
whether the object is a known or unknown class and
is not affected by an unknown class object with a low
classification score.
3 METHODOLOGY
3.1 Greedy-NMS
In greedy-NMS, all detected bounding boxes are
divided into the classes, and each set of bound-
ing boxes is processed as follows. Let B =
{(b
i
)
i=1,2,...N
} denote the set of bounding boxes and
Y = {(y
i
)
i=1,2,..N
)} the set of corresponding classi-
fication scores, where N is the number of bounding
Non-Maximum Suppression for Unknown Class Objects using Image Similarity
445

(a) Greedy-NMS. (b) Proposed Method.
Figure 1: An example of detection results after NMS processing.
boxes. Also, let D denote the set of output bounding
boxes.
Let y
m
denote the maximum value of an element
of Y and b
m
denote the bounding box that corresponds
to y
m
. First, b
m
is added to D and is removed from B.
Let B
s
denote the set of elements of B whose IoU with
b
m
is higher than threshold θ
1
. In NMS, B
s
is defined
as follows:
B
s
= {b | I(b, b
m
) > θ
1
, b ∈ B}. (1)
In Equation (1), I(b, b
m
) is the IoU of b and b
m
:
I(b, b
m
) =
Area(b ∩ b
m
)
Area(b ∪ b
m
)
, (2)
where Area(b ∩ b
m
) is the area of the intersection of b
and b
m
, and Area(b ∪ b
m
) is the area of the union of b
and b
m
. Let Y
s
denote the set of elements of Y corre-
sponding to each element of B
s
, with the elements of
B
s
and Y
s
removed from B and Y, respectively. The
above process is repeated until B becomes an empty
set.
3.2 Proposed Method
Let b and b
0
denote two different bounding-boxes.
While IoU is only used in greedy-NMS, a new cri-
terion using the image similarity index, such as the
Sum of Squared Distance (SSD), is used in the pro-
posed method in addition to IoU. The criterion used
in the proposed method is defined as follows:
C(b, b
0
, λ) = I(b, b
0
) + λ f (b, b
0
), (3)
where f (b, b
0
) is the value of the image similarity in-
dex between two images in b and b
0
, and λ is a balanc-
ing parameter between IoU and the image similarity
index. The sign of λ is determined such that λ f (b, b
0
)
is high when the similarity between the bounding box
b and b
0
is high.
In the proposed method, bounding-box b and b
0
are considered to have located the same object when
I(b, b
0
) > θ
1
∧C(b, b
0
, λ) > θ
2
. Here, θ
1
is the thresh-
old of the IoU of the two bounding boxes, and θ
2
is
the threshold of the criterion C(b, b
0
, λ). If the IoU
of the bounding boxes is large, they can be consid-
ered to have located different objects if the criterion
C(b, b
0
, λ) is large.
The algorithm of the proposed method is shown
in Algorithm 1. The algorithm with λ = 0 and θ
2
= 0
corresponds to the algorithm of greedy-NMS.
4 DATASET
To evaluate the ability to detect unknown class ob-
jects, we need a dataset in which unknown class ob-
jects appear. Even using Microsoft COCO dataset
(Lin et al., 2014), which is a common dataset in ob-
ject detection, we can build a dataset in which un-
known class objects appear by dividing classes into
known and unknown classes and selecting only im-
ages in which only known class objects appear for
training. However, there are a lot of unannotated ob-
jects in COCO, and the objects adversely affect the
evaluation. Therefore, we built a new dataset in which
the classes could be easily divided into known and
unknown classes, and annotated all the objects in the
dataset.
We selected 22 object classes from ones in the Mi-
crosoft COCO dataset and 33 object classes from ones
in the RGB-D object dataset (Lai et al., 2011). Ten
classes overlapped. Therefore, our dataset contained
45 object classes. We split the object classes into
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
446
Algorithm 1: Proposed Method.
Input: B, Y, λ, θ
1
, θ
2
B is the list of initial bounding boxes
Y contains corresponding detection scores
λ is the balancing parameter
θ
1
is the IoU threshold
θ
2
is the threshold of C(b, b
0
, λ)
Output: D
begin
D ← {}
while B 6= empty do
m = argmax Y
D ← D ∪ b
m
; B ← B − b
m
for b
i
in B do
if
I(b
m
, b
i
) ≥ θ
1
∧C(b
m
, b
i
, λ) ≥ θ
2
then
B ← B − b
i
; Y ← Y − y
i
end
end
end
return D
end
known classes (present in both the training and test
phases) and unknown classes (only present in the test
phase). From the 45 classes, 26 classes were selected
as known classes and 19 classes were identified as un-
known. Table 1 shows how we selected each class
from the two datasets and whether we assigned them
to known or unknown classes.
As shown in Fig.1, we placed several objects on
the table and recorded video sequences while circling
the desk.
At first, several known class objects were placed
on the table, and then the video sequences were
recorded. After that, unknown class objects were
added one by one as subsequent video was recorded.
Each time an unknown class object was added, the
placement of the objects was changed.
The collection of data in which the same known
class objects are placed is called a scene. Table 2
shows the number of known and unknown class ob-
jects in each scene.
5 EXPERIMENTS
From the dataset, we selected 2763 images in which
only known class objects appeared for training and
18763 images in which unknown class objects ap-
peared for evaluation. Training data was only used
for training the object detector.
For object detection, we used the binary classifi-
Table 1: A table showing the classes that exist in both the
COCO and RGB-D object dataset, the classes that exist only
in COCO, and the classes that exist only in RGB-D. Classes
without * indicate a known class, and classes with * indicate
an unknown class.
Both only COCO only RGB-D
bottle fork sponge
bowl knife soda can
scissors clock shampoo
toothbrush vase plate*
keyboard sports ball hand towel*
cell phone sandwich glue stick*
book hot dog flashlight*
banana donut cap*
apple broccoli calculator*
orange carrot toothpaste*
pizza instant noodles*
mouse food box*
food bag*
lemon*
onion*
food can*
tomato*
potato*
lime*
marker*
camera*
pitcher*
Table 2: The number of known and unknown class objects
in each scene.
Scene # of known class # of unknown class
1 5 0
2 5 5
3 5 5
4 5 4
5 5 1
6 5 2
7 5 10
8 5 10
9 10 10
10 10 7
cation model to predict whether a bounding box con-
tains an object or not. We used Fast R-CNN (Gir-
shick, 2015) as the object detector, which outputs
bounding boxes and object scores. We used ResNet-
101-FPN (He et al., 2016; Lin et al., 2017a) as the
backbone network in the object detector, which was
pretrained on the ImageNet1k (Deng et al., 2009). We
used stochastic gradient descent (SGD) with a mini-
batch size of 16. The model was trained for 4.0 ×10
4
iterations with an initial learning rate of 2.0 × 10
−2
,
which was subsequently divided by 10 at 3.0 × 10
4
it-
erations. We used a weight decay of 1.0 ×10
−4
and a
momentum of 0.9.
In the experiments, we used SSD and the color
histogram as the image similarity index. SSD is de-
Non-Maximum Suppression for Unknown Class Objects using Image Similarity
447
14.7
14.8
14.9
15.0
15.1
15.2
0.0 0.2 0.4 0.6 0.8 1.0
Undetection Rate of Unknow class Objects(%)
Duplicate Detection Rate of Known Class Objects(%)
!
!
!
!
!
!
!
!
Greedy
(a)
14.7
14.8
14.9
15.0
15.1
15.2
0.0 1.0 2.0 3.0 4.0 5.0
Undetection Rate of Unknow class Objects(%)
Duplicate Detection Rate of Unknown Class Objects(%)
!
!
!
!
!
!
!
!
Greedy
(b)
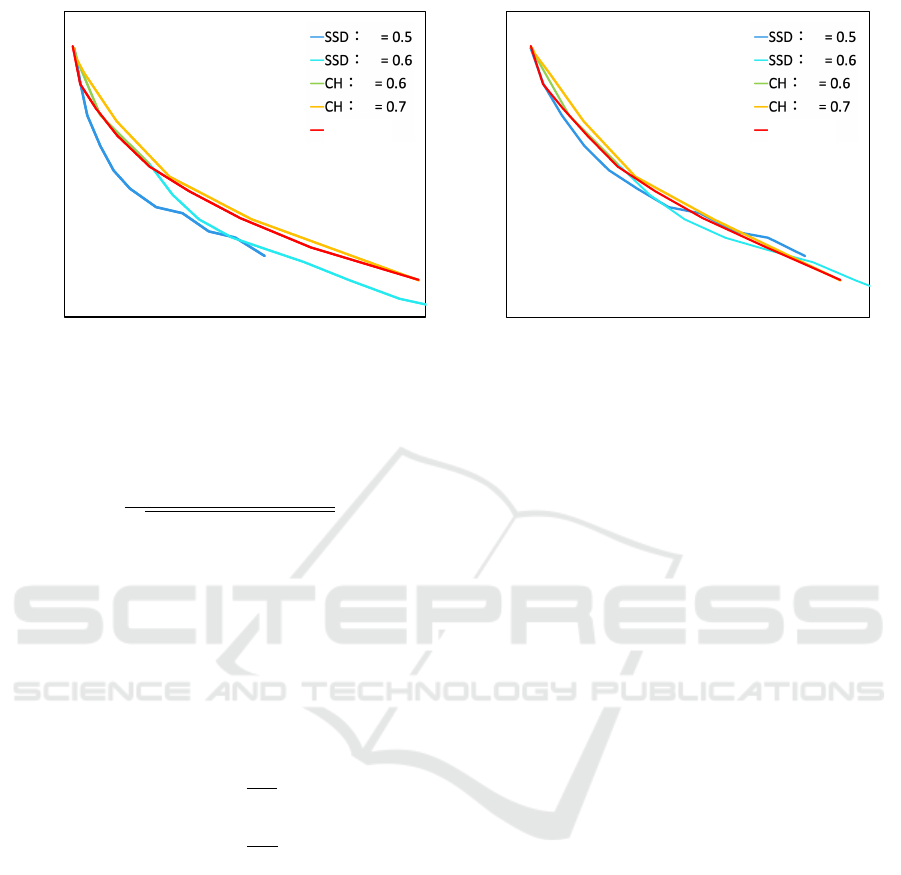
Figure 2: Undetection and duplicate detection rates for varying the threshold θ
1
, θ
2
and λ.
fined as follows:
d =
Σ
x,y
(I(x, y) − I
0
(x, y))
2
p
Σ
x,y
I(x, y)
2
· Σ
x,y
I
0
(x, y)
2
, (4)
where, I(x, y) and I
0
(x, y) are pixel values at (x, y) of
two different images.
We evaluated the proposed method using the per-
centage of undetected objects (undetection rate) and
the percentage of duplicately detected objects (dupli-
cate detection rate) when the bounding boxes were
suppressed using the respective image similarity in-
dices. Undetection rate r
ud
and duplicate detection
rate r
dd
are defined as follows respectively:
r
ud
= 100 ×
N
ud
N
all
, (5)
r
dd
= 100 ×
N
dd
N
all
, (6)
where N
all
, N
ud
, and N
dd
are the number of all objects,
undetected objects, and duplicately detected objects
throughout the test data respectively.
6 RESULT
The performance of the proposed method was com-
pared with greedy-NMS by varying the threshold θ
1
,
θ
2
and the balancing parameter λ defined in Formula
(3). In the proposed method using SSD as the image
similarity index, θ
1
was fixed at 0.5, θ
2
was speci-
fied 0.5 or 0.6, and λ was varied from −0.5 to 0. In
the proposed method using the coefficient of the color
histogram as the image similarity index, θ
1
was fixed
at 0.5, θ
2
was specified 0.6 or 0.7, and λ was varied
from 0 to 0.5. In greedy-NMS, θ
1
was varied from
0.5 to 0.75, and θ
2
and λ was fixed at 0.
Fig. 2 shows the undetection rates and the dupli-
cate detection rates. In both Fig. 2a and Fig. 2 b, the
vertical axis represents undetection rate of unknown
class objects. The horizontal axis represents the du-
plicate detection rate of known class objects and un-
known class objects in Fig. 2a and Fig. 2b respec-
tively.
In Fig. 2, when SSD was used as the image sim-
ilarity index, the undetection rate was lower with the
proposed method than with the greedy-NMS. On the
other hand, in Fig. 2, when the coefficient of the color
histogram was used as the image similarity index, the
undetection rate was higher with the proposed method
than with the greedy-NMS. The results show that the
proposed method is effective in reducing the unde-
tection rate of unknown class objects without sig-
nificantly increasing the duplicate detection rate of
known and unknown class objects when SSD is used
as the image similarity index. Furthermore, the results
shows that the effectiveness of the proposed method
depends on which image similarity index is used.
In Fig. 2, the increase in duplicate detection rate
was different between known and unknown classes.
The reason for this is probably due to the low ac-
curacy of the localization of unknown class objects.
Because localization depends on learning, unknown
class objects are more difficult to localize than known
class objects. Also, because SSD compares pixel val-
ues at the same location in two images, even if the
two different bounding boxes locate the same object,
the similarity is lower if the gap between the bound-
ing boxes is large. Therefore, the proposed method is
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
448

assumed to be more effective in improving the local-
ization accuracy of unknown class objects or using a
robust image similarity index for the misalignment of
the bounding box.
We also show some the visual results of the
greedy-NMS and the proposed method for compari-
son. As shown in Fig. 1, “toothpaste”, which is an un-
known class object to be detected, was removed when
greedy-NMS was used (Fig. 1a), whereas it was de-
tected in the position indicated by the green box in the
proposed method (Fig. 1b).
7 CONCLUSION
In this paper, in addition to the IoU of the bounding
boxes, we present an NMS method using the image
similarity index of the images in the two bounding
boxes. To evaluate our method’s ability to detect un-
known class objects, we constructed a new dataset
including unknown class objects. Our experiment
shows that the proposed method can reduce the num-
ber of unknown class objects mistakenly removed by
NMS. In the future, we plan to develop an effective
feature extraction method for unknown class objects
and to use it with NMS.
REFERENCES
Bodla, N., Singh, B., Chellappa, R., and Davis, L. S. (2017).
Soft-nms–improving object detection with one line of
code. In ICCV, pages 5561–5569.
Cai, Z. and Vasconcelos, N. (2018). Cascade r-cnn: Delving
into high quality object detection. In CVPR, pages
6154–6162.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In CVPR, pages 248–255. IEEE.
Girshick, R. (2015). Fast r-cnn. In ICCV, pages 1440–1448.
IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In CVPR, pages
770–778. IEEE.
Hosang, J., Benenson, R., and Schiele, B. (2017). Learning
non-maximum suppression. In CVPR, pages 4507–
4515.
Huang, X., Ge, Z., Jie, Z., and Yoshie, O. (2020). Nms
by representative region: Towards crowded pedestrian
detection by proposal pairing. In CVPR, pages 10750–
10759.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-scale
hierarchical multi-view rgb-d object dataset. In ICRA,
pages 1817–1824. IEEE.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In CVPR, volume 1, page 4.
IEEE.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
ICCV, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft coco: Common objects in context. In ECCV,
pages 740–755. Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In ECCV, pages 21–37. Springer.
Liu, Y., Liu, L., Rezatofighi, H., Do, T.-T., Shi, Q.,
and Reid, I. (2019). Learning pairwise relationship
for multi-object detection in crowded scenes. arXiv
preprint arXiv:1901.03796.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2015). You only look once: Unified, real-time object
detection. CoRR, abs/1506.02640.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In NIPS, pages 91–99.
Uijlings, J. R., Van De Sande, K. E., Gevers, T., and Smeul-
ders, A. W. (2013). Selective search for object recog-
nition. International Journal of Computer Vision,
104(2):154–171.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019). Objects as
points. arXiv preprint arXiv:1904.07850.
Non-Maximum Suppression for Unknown Class Objects using Image Similarity
449
