
New Challenges of Face Detection in Paintings based on Deep Learning
Siwar Bengamra
1 a
, Olfa Mzoughi
2 b
, André Bigand
3 c
and Ezzeddine Zagrouba
1
1
LIMTIC, University of Tunis El Manar, Ariana, Tunisia
2
Prince Sattam Bin Abdulaziz University, U.A.E.
3
LISIC, ULCO, Calais Cedex, France
Keywords:
Face Detection, Artworks, Tenebrism Style, Deep Learning, Convolutional Neural Network.
Abstract:
In this work, we address the problem of face detection from painting images in Tenebrism style, a particular
painting style that is characterized by the use of extreme contrast between light and dark. We use Convolu-
tional Neural Networks (CNNs) to tackle this task. In this article, we show that face detection in paintings
presents additional challenges as compared to classic face detection from natural images. For this, we present
a performance analysis of three CNN architectures, namely, VGG16, ResNet50 and ResNet101, as back-
bone networks of one of the most popular CNN based object detector, Faster RCNN, to boost-up the face
detection performance. This paper describes a collection and annotation of benchmark dataset of Tenebrism
paintings. In order to reduce the impact of dataset bias, we propose to evaluate the effect of several data aug-
mentation techniques used to increase variability. Experimental results reveal a detection average precision
of 44.19% with ResNet101, while better performances have been achieved 79.48% and 83.94% with VGG16
and ResNet50, respectively.
1 INTRODUCTION
The evolution of computer vision-based study of vi-
sual art has been an extremely active research area
over the last decades. Recently, the task of inferring
properties of illumination distribution from art paint-
ings has become important to discover and understand
the history of art. In Tenebrism style, art historians
were especially interested in estimating the illuminant
position within a painting, and thereby in answering
technical questions. For example, it is used to verify
if there is a single source of light or multiple ones dur-
ing painting. Is the source of light the one depicted or
outside the picture? Is the painting executed under
different studio conditions or even by possibly dif-
ferent artists? To answer these questions and many
others technical ones, Stork and Johnson (Stork and
Johnson, 2006) have focused on this issue and they
have shown that the illuminant location estimation is
mainly linked to the face viewpoint of people depicted
in the painting.
a
https://orcid.org/0000-0001-5546-5292
b
https://orcid.org/0000-0001-8758-9740
c
https://orcid.org/0000-0002-3165-5363
Face detection is a fundamental and important
task in a variety of computer vision applications
such as person re-identification, surveillance system,
facial expression recognition and facial image en-
hancement. Although it has been extensively studied
over the past years, automatic face detection remains
an important area of research due to the increasing
need for accuracy improvements, especially in uncon-
strained environments, or in the presence of new do-
main applications. For that, we firstly focus on au-
tomatic face detection in Tenebrism paintings. How-
ever, this task represents different challenges as given
in (Mzoughi et al., 2018). Tenebrism paintings are
characterized by violent composition between light
and dark. They also exhibit large variation in view-
point, pose and occlusion. Compared to real scene
photographs, there is a significant difference in ap-
pearance and dress of painted characters. Finally, the
number of available painting images is limited.
Recently some authors tried to quantify painting
styles as Van Gogh and Pollock ones ((L.Shamir,
2012)) with success. It appears that this task is par-
ticularly difficult using classic image processing at-
tributes (in this paper some 42 to 80 features are used
to correctly recognize styles), and the author shows
Bengamra, S., Mzoughi, O., Bigand, A. and Zagrouba, E.
New Challenges of Face Detection in Paintings based on Deep Learning.
DOI: 10.5220/0010243703110320
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
311-320
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
311

the complexity of identification of aesthetic painting
properties. Thus some authors investigate (machine
learning (M.Fiorucci et al., 2020)) CNNs to avoid this
problem (Qiao et al., 2019). They succeed in transfer-
ring ancient paintings to natural image and thus pro-
pose a new solution for painting processing.
With the great breakthrough of deep convolutional
neural networks (CNNs) and the availability of large
people-focused datasets, a new generation of more ef-
fective face detectors emerged to improve state-of-the
art performances and these CNN-based face detectors
can be roughly divided in three categories: sliding
window, two-stage and single stage detectors. The
sliding window approach consists of scanning the im-
age with rectangular window on multiple scales and
applying a CNN-classifier to each sub-image (Ser-
manet et al., 2014). The sliding window process is
simple but extremely slow. The two-stage detectors
have similar design as Faster RCNN (Ren et al., 2015)
by generating region of interest (ROIs) to filter out
most of the background at first and then classifying
each ROI, as well as further regressing them to the
ground-truth locations. In this scope, we report re-
cent works: FA-RPN (Najibi et al., 2018) and DSFD
(Wu et al., 2019). In (Najibi et al., 2018) authors pro-
posed enhancing the robustness of face detection via
a novel strategy for generating region proposals. On
the other hand, the one-stage detectors directly output
bounding boxes and confidences without region pro-
posal parts and include YOLO (Redmon et al., 2016),
SFDet (Zhang et al., 2019a), PyramidBox (Tang et al.,
2018), DSFD (Li et al., 2018), S3FD (Zhang et al.,
2017) and SSH (Najibi et al., 2017). While one-stage
methods made detection at a real time speed, two-
stage methods have been proved to be more accu-
rate than other methods (Li et al., 2019; Zhang et al.,
2019b; Quang and Fujihara, 2019). Because the real-
time speed is not so important for the purpose of our
domain application, we use Faster RCNN (Ren et al.,
2015), the top performing two-stage detectors in re-
cent years.
Comparing to classic approaches, deep learning-
based methods successfully inherit powerful feature
extraction abilities thanks to different existing CNN
model architecture. Thus, the detection performance
depends significantly on the backbone model used for
feature extraction. Thereby, the main contributions of
this work consist in: (1) a collection of new challeng-
ing Tenebrism dataset to advance current research in
Artwork and computer vision, (2) a comparative study
of fine-tuned popular CNN models to assess the best
model for face detection in Tenebrism context and (3)
investigation of data augmentations to evaluate their
influence on face detection.
The rest of the paper is organized as follows. Sec-
tion 2 briefly presents and discusses common deep
convolutional neural network architectures. For face
detection in painting, we adopt the deep learning
framework Faster RCNN, which we describe in sec-
tion 3. The description of the new dataset and the
experimental results are provided in sections 4 and 5,
respectively. Finally, we draw conclusions and rec-
ommend future directions in section 6.
2 POPULAR DEEP CNN
ARCHITECTURES
2.1 VGGNet based Architecture
VGGNet was introduced by the Visual Geomtry
Group (VGG) of the university of Oxford in 2014 (Si-
monyan and Zisserman, 2015). It achieves the first
place on image localization task and the second place
on the classification task at 2014-ImageNet Large
Scale Visual Recognition Challenge (ILSVRC) com-
petition. The VGG architecture contains subsequent
convolutional layers, each of them uses the ReLU ac-
tivation function, followed by max-pooling layers and
three fully connected layers. Max-pooling layers are
applied at different steps in the architecture and are
used to reduce the size of the volume. The final layer
is a Softmax layer used for classification. VGG net
have realized an improvement with regard AlexNet
by utilizing receptive field (i.e. kernel-sized filters of
3*3) much smaller than that of AlexNet (Krizhevsky
et al., 2012) (11*11) in order to provide better feature
extraction. There are two versions of this architec-
ture according to the number of convolutional layers:
VGG16 and VGG19. The main limitation of VGG
networks is that they are very large models in terms
of the number of trainable parameters (138 millions).
Hence VGG nets require extensive computational and
memory resources which make it slow to train.
2.2 ResNet based Architecture
A ResNet, is a deep Convolutional Neural Network
with residual learning elements, and was introduced
by (He et al., 2016) and won prize in the ImageNet
Large Scale Visual Recognition Challenge 2015 (Rus-
sakovsky et al., 2015) and Microsoft Common Ob-
jects in Context 2015 (Lin et al., 2014). Unlike tradi-
tional CNNs where the output of the convolution layer
is the input for the next convolution layer, ResNet
uses residual learning with identity as shortcut con-
nections to skip training of few layers in the forward
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
312

feeding on an input. In fact, shortcut connection con-
sists in adding the activation from a previous layer as
a residue to the activation of a deeper layer in the net-
work in order to predict the desired output. The pop-
ular ResNet50 is a 50 layer residual network with 49
convolutional layers and one fully connected layer at
the end. There are other variants of ResNet according
to the different numbers of layers: 34, 101, 152.
2.3 Discussion
We remark that most deep CNN architectures typi-
cally follow the simplest type of model, the sequen-
tial model, as a linear stack of layers (e.g. LeNet
(LeCun et al., 1995; El-Sawy et al., 2016), AlexNet
(Krizhevsky et al., 2012) and VGGNet (Simonyan
and Zisserman, 2015)). The two concepts, local re-
sponse normalization (LRN) and dropout, are intro-
duced with AlexNet to improve the generalization by
reducing overfitting. The ReLU activation function
was also employed to improve the convergence per-
formance instead of the conventional activation func-
tions like "tanh" and "sigmoid" functions, by allevi-
ating the problem of vanishing gradients for positive
values (Filonenko et al., 2017; Khan et al., 2019). The
key innovations in the VGG architecture were the re-
duce of filter size and the increase of depth (Khan
et al., 2019). In fact, the small size of convolutional
filters involves the use of more ReLU units that makes
the decision function more discriminative. Although,
increasing the depth with VGG leads the network to
better performances by extracting rich and diverse
features, it makes training more difficult and com-
putationally expensive requiring supercomputing in-
frastructure for producing results(Khan et al., 2019).
Recently, ResNet architecture (He et al., 2016) has
shown to be effective for dealing with the problem of
vanishing gradients by using skip connections which
facilitates larger gradient flow to initial layers during
backpropagation (Varshaneya et al., 2019; Wan et al.,
2018).
We thus can summarize the importance to under-
stand how CNN architecture design influences model
accuracy. Many other factors, such as data aug-
mentation, training dataset, Intersection-Over-Union
threshold, loss function and hyperparameters (e.g.
batch size and learning rate), can also impact the de-
tection performance
3 FASTER RCNN
Faster-RCNN (Ren et al., 2015) is one of the most
well-known object detection algorithms which is
composed of a backbone network and two subnet-
works. The backbone is responsible for extracting
convolutional features. The first subnetwork, called
Region Proposal Network (RPN), is devoted to pro-
pose candidate object bounding boxes; the second
subnetwork, which is in essence Fast R-CNN (Gir-
shick, 2015), associates features to each generated
candidate box to perform classification and bounding-
box regression.
3.1 Feature Network
The backbone network is used to extract the 2D fea-
ture map over the entire input image. This network
consists of 2D convolutional layers and max pool-
ing layers obtained from a base convolutional network
such as VGG16 minus a few last layers.
3.2 Region Proposal Network
The Region Proposal Network (RPN) is then ap-
plied to get N proposals called the Region of Inter-
ests (ROIs) that are likely to contain any object from
the backbone’s output: the convolutional 2D feature
map. For each sliding window (e.g. pixel location)
over the input feature map, the RPN first generates
nine anchors with different size scales (128, 256, 512)
and three aspect ratios (1:1, 1:2, 2:1). For each an-
chor, we assign a ground-truth label to 1 if it has
an Intersection-over-Union (IOU) score greater than
0.5 with one ground-truth box, and a label equals to
0 otherwise negative. Every anchor is then mapped
to a low-dimensional feature vector that will be fed
into two competitive fully-connected layers - a box-
classification layer and a box-regression layer. The
classification layer is responsible for checking if the
anchor (bounding box candidate) belongs to object
class (= positive) or not (=negative). The IOU is cal-
culated by Eq. 1
IOU =
A
proposal
∩ A
ground−truth
A
proposal
∪ A
ground−truth
(1)
where A
proposal
and A
ground−truth
are the area of the
proposals (i.e. anchors) and ground-truth bounding
boxes, respectively. The box regression layer tries
to adjust the boundaries of the proposals according
to ground-truth. The outputs will be region propos-
als coordinates representing two diagonal corners for
each proposal (top-left and bottom-right) and prob-
abilities representing how likely the region proposal
is to be an object (i.e. objectness scores). Finally, at
the ROI proposal layer, the regions of interests (ROIs)
are gathered in the descending order of objectness
New Challenges of Face Detection in Paintings based on Deep Learning
313
score. Non-maximum suppression is used to com-
bine regressed anchors before selecting ROIs from an-
chors to avoid duplicated ROIs. To optimize the RPN
performance (adjust the weights in the RPN) during
training, both classification loss and bounding box re-
gression loss are defined and given by the equation 2.
L(p
i
, t
i
) =
1
N
cls
∑
i
L
cls
(p
i
, p
∗
i
) + λ
1
N
reg
∑
i
p
∗
i
L
reg
(t
i
, t
∗
i
)
(2)
where i is the index of the anchor in the mini-batch
and λ is a balancing constant. The first term in 2 is the
classification loss over two classes and is defined by
3. p
i
is the probability from the classification branch
for anchor i and p
∗
i
is the assigned ground-truth label.
L
cls
(p
i
, p
∗
i
) = − p
∗
i
log(p
i
) − (1 − p
∗
i
)log(1 − p
i
)
(3)
The second term is the regression loss of bounding
box activated only if the anchor contains an object
(i.e. p
∗
i
= 1). The definition for this regression loss
is described by equation 4:
L
reg
(t
i
, t
∗
i
) =
∑
i
smooth
L
1
(t
i
− t
∗
i
) (4)
The variables t
i
and t
∗
i
represent the four coordinates
of predicted bounding box and the ground-truth coor-
dinates, respectively .
3.3 Detection Network
In this stage, each ROI is classified and its bounding
box is refined (i.e. regressed) using the Fast RCNN
network (Girshick, 2015). At first, ROI Pooling layer
is used to normalize the candidate regions (propos-
als). The obtained feature-map regions will then be
flattening into a fixed-length feature vector regardless
of input feature map and proposal sizes. Finally, the
feature vectors are put into a sequence of fully con-
nected layers, which includes a softmax layer and a
linear regression layer, to conduct classification and
regression.
4 EXPERIMENTAL SETUP
For experimental setup, we used Google Colab Nvidia
Tesla K80 GPU for training. The tests were per-
formed using a workstation powered by an Intel core
i7- (3.9 GHz) processor, with 32 GB RAM, and an
NVIDEA GeForce GTX 1650 GPU with a graphics
memory of 4GB. We adopt a keras implementation
of Faster RCNN (Lufan, 2019) using TensorFlow li-
brary to train the deep learning models and predict
face bounds and objectness score.
The performance of our system is evaluated first
of all in terms of the Intersection-over-Union (IOU,
Eq. 1). So if IOU outperforms a threshold value,
the face proposal is considered as true positive, or if
not as a false positive. TP (True Positive) indicates
the number of correct faces detected, FP (False Posi-
tive) indicates the number of wrong face detected, TN
(True Negative) indicates the ground-truth faces not
detected, and FN (False Negative) indicates the num-
ber of all possible faces that were correctly not de-
tected. To give an overall insight of the performance
of the face detector, we measured the following com-
monly used metrics: the precision/recall curve and
the mean average precision (mAP) as computed in the
Pascal VOC challenge (Everingham et al., 2009).
4.1 Tenebrism Dataset
Face detection in paintings in general, and in Tene-
brism style in particular is a new topic of research.
There is no benchmark dataset for this problem. For
that, we collect our dataset from two main sources:
• 304 images are sourced principally from Google
images, WikiArt.org and Pinterest,
• The other 105 images are collected from Github
(Meier, 2018) and used in the problem of hand
detection.
The dataset contains 409 color painting images
belonging to the Tenebrism style. They contain in to-
tal 1159 faces and each image holds at least one face.
The dataset may contain the same painting but with
variable capture conditions (see Figure 1).
Figure 1: The same painting taken with variable capture
conditions.
Face detection in this dataset is challenging for
different reasons (Figure 2). First, it contains differ-
ent face views: frontal, mid-profile and profile (right
and left). In addition to that, there are various faces
partially and heavily occluded with hair, clothes or
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
314

(a)
(b)
(c)
Figure 2: Challenges in face annotation: low resolution (a, green), occlusion (b,blue) and difficult poses (b,c, red).
persons. Another aspect which is particular in this
dataset is that it holds a significant difference in ap-
pearance and dress of painted characters as well as
in the scene in general, compared to real-scene pho-
tographs. Moreover, it is characterized by violent
contrasts of light and dark. Finally, the dataset con-
tains several low-resolution face images. In such con-
ditions, we aim to study if pre-trained photograph-
based face detectors could realize successful results
in such images. In fact, a good face detector should
detect a face whatever it is photographed or painted.
The dataset is annotated using the graphic image an-
notation tool labelling available at (Tzutalin., 2015).
The annotation process consists of drawing bounding
boxes around faces in the images, then generating au-
tomatically XML files to store location details of the
faces in the images.
4.2 Training Settings
We follow the original Faster RCNN to set the hy-
perparameters for end-to-end training. The weights
of the used deep learning models were initialized
from models that are pre-trained on the natural image
dataset ImageNet (Deng, 2009). To minimize over-
fitting during training and to improve generalization
to unseen paintings, several data augmentation tech-
niques were applied randomly: contrast changes (C),
horizontal flipping (HF), vertical flipping (VF) and ro-
tation (R). Augmentation is performed on-the-fly for
each batch since it can generate more unique training
images than offline augmentation, which can improve
generalization capability (O’Gara and McGuinness,
2019). The goal of contrast augmentation is to ap-
ply random changes to contrast for improving the ro-
bustness of CNN models whilst preserving geometry.
For that, we used contrast limited adapted histogram
equalization (CLAHE) (Zuiderveld, 1994). Training
images with the associated bounding boxes around
faces are rotated with angle in [-45
◦
, 45
◦
].
5 RESULTS AND DISCUSSION
In this section, first, we show limitation of a
photograph-based face detector. Then, we com-
pare performance of three different architectures fine-
tuned on our Tenebrism Dataset. In fact, we use
ResNet and VGGNet since most detection networks
utilize them as the basic feature extraction module at
present (Zhang et al., 2020; Chi et al., 2019). So,
VGG16 was selected first, as used in the original pa-
per (Ren et al., 2015), and two ResNet configurations
(ResNet50 and ResNet101) were investigated for the
new task. Face detection is then evaluated by k-fold
cross-validation process. Finally, we evaluate the ef-
fects of data augmentations on the face detection per-
formances.
5.1 Evaluation of Transfer Learning
A great success has been realized using faster-RCNN
face detector trained on photographs. It has realized
a mAP of 97.79% (Wu et al., 2019). We expect that
a good face detector should recognize faces regard-
less they are photographed or painted. To investigate
this issue, the following experiment has been estab-
lished. We train Faster RCNN on the AFLW dataset
(which is a famous dataset of photograph faces). Then
we test this model, called Model 1 in the sequel, on
the Tenebrism dataset. We obtain a mean average
precision (AP) score of 29.05% (see table 1) which
New Challenges of Face Detection in Paintings based on Deep Learning
315
proves the limitation of photograph-based face detec-
tor in the context of Tenebrism paintings. We can con-
clude that these images exhibit some specific features
that makes them different from photographs. For that,
we investigate the use of transfer learning in two lev-
els. In the first level we apply transfer learning from
Model 1 by retraining only the last classification stage
(i.e. the fully connected layers) on our specific Tene-
brism dataset. The second level consists of retraining
all layers of model 1 on our target dataset. The two-
level models are noted respectively Model 2 and 3.
Results are shown in table 1. By employing transfer
learning, model 2 achieves 19.3% improvements in
mean average precision. In addition, when the model
1 is trained with a smaller number of painting images,
high face detection performances are achieved (79.6
%), thereby illustrating the power of transfer learning
to make models generalize well in the task of face
detection in paintings, even with a limited number
of training dataset. This experiment clearly demon-
strates the specificity of painting images compared to
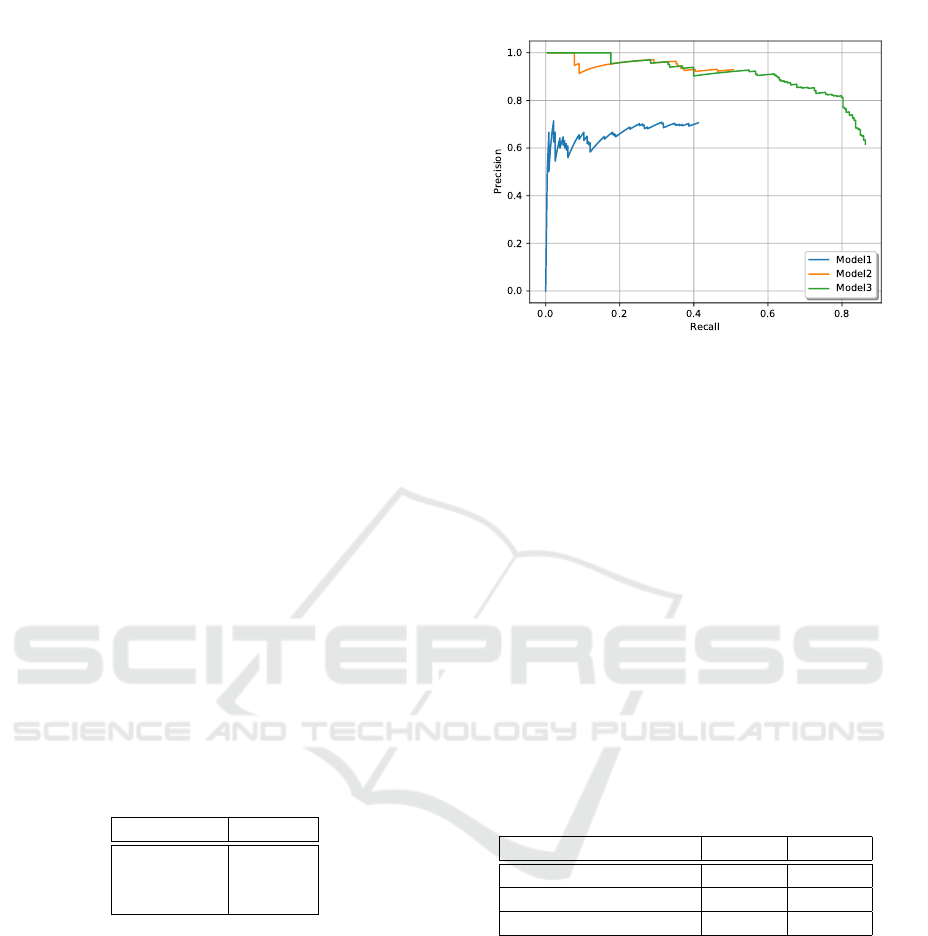
natural images. Figure 3 depicts the Precision-Recall
curves of the three deep learning models previously
mentioned for face detection from Tenebrism paint-
ings. We remark that model 1 performs poorly by
detecting a large number of incorrect faces (low pre-
cision) and missing most ground truth faces (low re-
call). The model 2 has high precision but low recall,
meaning that a significant number of ground truth
faces are not detected. When training the model 1
on our target dataset, the resultant model 3 achieves a
significant gain in recall.
Table 1: Evaluating the effect of Transfer Learning.
Experiment mAP
75
Model 1 29.05 %
Model 2 48.35 %
Model 3 79.6 %
5.2 Effects of Feature Extractors
The proposed system implements the Faster RCNN
meta-architecture with different feature extractors to
deal with the face detection from Tenebrism images.
Table 2 shows comparative face detection perfor-
mances of fine-tuned backbone architectures on our
Tenebrism dataset. First, we observe that the learned
models ResNet50 and VGG16 achieved high perfor-
mances when tested on Tenebrism images, where the
ResNet101 model leads to inferior results. Note also
that Faster RCNN with ResNet50 as feature extrac-
tor slightly exceeds the face detection average preci-
sion obtained with VGG16. This performance dif-
ference can be initially explained by the important
Figure 3: Performances of deep learning models with 0.75
IOU threshold.
role of shortcut connections in ResNet architecture
which prevent loss of information transmitted in the
layer. The increase of the network depth (i.e number
of layers) can also justify the high performance rate
obtained with ResNet50 (83.94%) by learning more
complex features. However, we remark that using
deeper network like ResNet101, may require more
epochs and certainly bigger training dataset for con-
vergence. Based on these results, we believe that vi-
sualizing the internal features of Faster RCNN based
ResNet50 as perceptible patterns can be helpful to
understand the internal working mechanism and con-
tribute to significant advances in face detection from
Tenebrism paintings.
Table 2: Face detection performances for Faster RCNN
with ResNet50, ResNet101 and VGG16 as backbones.
mAP
50
and mAP
75
are for IOU thresold 0.5 and 0.75, re-
spectively.
Backbone architecture mAP
50
mAP
75
Resnet50 83.94% 74.64%
Resnet101 44.19% 31.45%
VGG16 79.48% 70.01%
Figure 4 shows some examples of face detec-
tion outputs obtained by Faster RCNN trained on our
Tenebrism dataset. The detection results using the
two best performing models ResNet50 and VGG16
are depicted by orange and purple bounding boxes, re-
spectively, with confidence scores indicating the sys-
tem’s confidence on the face detection result. Ground-
truth faces are represented by green bounding boxes.
Faster RCNN is able to localize faces under differ-
ent illumination conditions and for different view-
points accurately. However, using VGG16, Faster
RCNN fails to detect objects which can be localized
with Faster RCNN based ResNet50 (see Figure 4).
The learning process of ResNet50 and VGG16 with
Tenebrism images can be analyzed through figure 5,
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
316
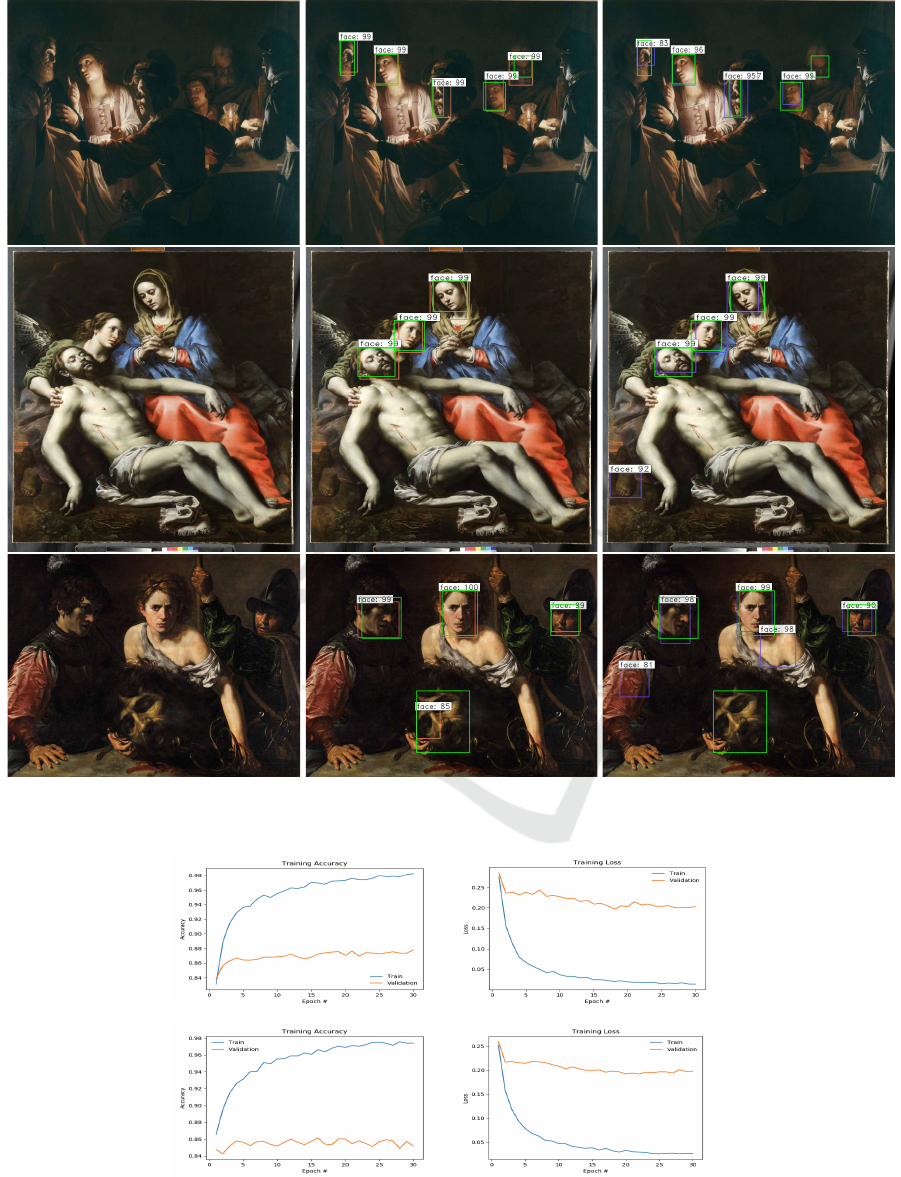
(a) (b) (c)
Figure 4: Qualitative results. (a) original images and outputs of Faster RCNN based (b) ResNet50 and (c) VGG16 with some
false positives and false negatives.
(a) Training and validation accuracy curves of Faster RCNN based Resnet50.
(c) Training and validation accuracy curves of Faster RCNN based VGG16.
(b) Training and validation loss curves of Faster RCNN based Resnet50.
(d) Training and validation loss curves of Faster RCNN based VGG16.
Figure 5: Training accuracy and loss of Faster RCNN based ResNet50 and VGG16.
New Challenges of Face Detection in Paintings based on Deep Learning
317

Table 3: Five-fold cross validation diagram.
Data
Number of faces
Performances(mAP)
Training set Validation set
Fold 1 261(752 faces) 66(175 faces) 73.89%
Fold 2 261(741 faces) 66(186 faces) 64.68%
Fold 3 262(738 faces) 65(189 faces) 68.67%
Fold 4 262(735 faces) 65(192 faces) 83.08%
Fold 5 262(742 faces) 65(185 faces) 67.89%
Average 262(742 faces) 65(185 faces) 71.64%
Table 4: Influence of data augmentations in face detection (Experiments with IOU > 0.5).
Data augmentations VGG16 ResNet50
Without Data Augmentation 79.84% 83.94%
Contrast enhancement (CE) 80.13% 81.11%
Horizontal Flipping (HF) 80.85% 84.06%
Vertical Flipping(VF) 75.62% 83.99%
Rotation (R) 69.89% 86.51%
showing the accuracy/loss curves. It can be observed
that the training and validation accuracy provided by
ResNet50 are relatively high. We can also deduce
that the validation error consistently decreases with
the training error implying that no overfitting is ob-
served.
5.3 Evaluation with Cross Validation
In order to evaluate the effectiveness of the model, we
conduct k-fold cross-validation experiments with the
commonly used k = 5. We performed experiments
with Faster RCNN based ResNet50 since it produced
the best results ( section 5.2). In detail, the training
dataset was divided into five equal parts (folds) ran-
domly, and in each round, one of these five parts is
used as evaluation set and the remaining four parts
are used as training set. The operation diagram of the
five-fold cross-validation with performance measures
are illustrated in Table 3. As a result, we obtained an
interesting mean average precision of 71.64% ± 10 in
five fold cross-validation that can approve the stability
of the current face detection model.
5.4 Effects of Data Augmentation
To investigate the effects of data augmentation on the
performances of the Faster RCNN network, we eval-
uate separately each image data augmentation tech-
nique mentioned in section 4.2. Table 4 shows that
the use of online data augmentation can contribute
to improve the performances compared to the previ-
ously trained models without data augmentation. For
example, compared to the non-data-augmented Faster
RCNN based ResNet50, the HF, VF and R improve
the detection results by 0.12%, 0.05% and 2.57%.
Thus we obtain best results with ResNet50 and ro-
tation (mean average precision of 86.51%). Unfor-
tunately, we also observe that these random augmen-
tations can degrade the face detection performances
(from 83.94% to 81.11% with CE), which may be ex-
plained by a possibility of an intra-class imbalanced
data created due to these naive augmentations. This
experiments motivated us to focus on proposing more
effective augmentation techniques according to the
specific Tenebrism style of images.
6 CONCLUSION
In this work, we employed the deep learning frame-
work Faster RCNN to detect faces from Tenebrism
paintings. Firstly, we described the collection and an-
notation of a limited benchmark, namely Tenebrism
dataset for existing methodologies comparison. Then,
we show that fine-tuning Faster RCNN with differ-
ent backbones, ResNet50 and VGG16, provide im-
pressive results that can be helpful for further ad-
vances in face detection from Tenebrism paintings.
Although, online data augmentation makes it possi-
ble to improve face detection, performances can be
deteriorated. So in the future, we will continue to
study and experiment Tenebrism specific data aug-
mentations. We also plan to deploy the detection tech-
nique for other parts of body in the paintings towards
further progress of art technique understanding by art
historians. So far, the expected impact and outcomes
of automatic human part detection from ancient art
paintings should help art historians to better under-
stand illumination techniques. A better comprehen-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
318

sion of the specific features characterizing paintings
is also expected to explain our results, since we do
not have theoretical tools to explore that way at the
moment. Thus a great number of application works
can be exploded in the future.
REFERENCES
Chi, C., Zhang, S., Xing, J., Lei, Z., Li, S., and Zou, X.
(2019). Selective refinement network for high perfor-
mance face detection. ArXiv, abs/1809.02693.
Deng, J. (2009). A large-scale hierarchical image database.
In CVPR 2009.
El-Sawy, A., El-Bakry, H. M., and Loey, M. (2016). Cnn for
handwritten arabic digits recognition based on lenet-5.
In AISI.
Everingham, M., Gool, L. V., Williams, C. K. I., Winn,
J. M., and Zisserman, A. (2009). The pascal visual
object classes (voc) challenge. International Journal
of Computer Vision, 88:303–338.
Filonenko, A., Kurnianggoro, L., and Jo, K.-H. (2017).
Comparative study of modern convolutional neural
networks for smoke detection on image data. 2017
10th International Conference on Human System In-
teractions (HSI), pages 64–68.
Girshick, R. B. (2015). Fast r-cnn. 2015 IEEE International
Conference on Computer Vision (ICCV), pages 1440–
1448.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Khan, A., Sohail, A., Zahoora, U., and Qureshi, A. S.
(2019). A survey of the recent architectures of deep
convolutional neural networks. Artificial Intelligence
Review, pages 1–62.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In NIPS.
LeCun, Y., Jackel, L. D., Bottou, L., Cortes, C., Denker,
J. S., Drucker, H., Guyon, I., Muller, U. A., Sackinger,
E., Simard, P. Y., and Vapnik, V. (1995). Learning
algorithms for classification: A comparison on hand-
written digit recognition. In Oh, J., Kwon, C., and
Cho, S., editors, Neural networks, pages 261–276.
World Scientific.
Li, J., Wang, Y., Wang, C., Tai, Y., Qian, J., Yang, J., Wang,
C., Li, J., and Huang, F. (2018). DSFD: dual shot face
detector. CoRR, abs/1810.10220.
Li, R.-Q., Bian, G.-B., Zhou, X.-H., Xie, X., Ni, Z.-L., and
Hou, Z.-G. (2019). A two-stage framework for real-
time guidewire endpoint localization. In MICCAI.
Lin, T.-Y., Maire, M., Belongie, S. J., Hays, J., Perona, P.,
Ramanan, D., Dollár, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In
ECCV.
L.Shamir (2012). Computer analysis reveals similarities
between the artistic styles of Van Gogh and Pollock.
Leonardo, 45(2):149–154.
Lufan, C. (2019). Keras implementation of faster r-cnn.
https://github.com/moyiliyi/keras-faster-rcnn.
Meier, G. J. (2018). Detecting hands in renaissance era
paintings through a combination of multiple cues.
Master’s thesis, Utrecht University.
M.Fiorucci, M.Khoroshiltseva, M.Pontil, A.Traviglia, Bue,
A., and S.James (2020). Machine learning for cul-
tural heritage: a survey. Pattern Recognition Letters,
133:102–108.
Mzoughi, O., Bigand, A., and Renaud, C. (2018). Face
detection in painting using deep convolutional neural
networks. In Advanced Concepts for Intelligent Vision
Systems (ACIVS), pages 333–341, Cham. Springer In-
ternational Publishing.
Najibi, M., Samangouei, P., Chellappa, R., and Davis, L. S.
(2017). SSH: single stage headless face detector.
CoRR, abs/1708.03979.
Najibi, M., Singh, B., and Davis, L. S. (2018). FA-RPN:
floating region proposals for face detection. CoRR,
abs/1812.05586.
O’Gara, S. and McGuinness, K. (2019). Comparing data
augmentation strategies for deep image classification.
In IMVIP 2019: Irish Machine Vision and Image Pro-
cessing Conference Proceedings.
Qiao, T., Zhang, W., Zhang, M., Ma, Z., and Xu, D. (2019).
Ancient painting to natural image: A new solution for
painting processing. 2019 IEEE Winter Conference on
Applications of Computer Vision (WACV), pages 521–
530.
Quang, N. V. and Fujihara, H. (2019). Revisiting a single-
stage method for face detection. 2019 14th IEEE In-
ternational Conference on Automatic Face & Gesture
Recognition (FG 2019), pages 1–8.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 779–788.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 39:1137–1149.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M. S., Berg, A. C., and Li, F.-F. (2015). Ima-
genet large scale visual recognition challenge. Inter-
national Journal of Computer Vision, 115:211–252.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R., and LeCun, Y. (2014). Overfeat: Integrated recog-
nition, localization and detection using convolutional
networks. CoRR, abs/1312.6229.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Stork, D. G. and Johnson, M. K. (2006). Computer vision,
image analysis, and master art: Part 2. IEEE Multi-
Media, 13(4):12–17.
New Challenges of Face Detection in Paintings based on Deep Learning
319

Tang, X., Du, D. K., He, Z., and Liu, J. (2018). Pyramidbox:
A context-assisted single shot face detector. CoRR,
abs/1803.07737.
Tzutalin. (2015). Labelimg.
https://github.com/tzutalin/labelImg.
Varshaneya, V., Balasubramanian, S., and Gera, D. (2019).
Res-se-net: Boosting performance of resnets by en-
hancing bridge-connections. ArXiv, abs/1902.06066.
Wan, S., Liang, Y., and Zhang, Y. (2018). Deep convo-
lutional neural networks for diabetic retinopathy de-
tection by image classification. Comput. Electr. Eng.,
72:274–282.
Wu, W., Yin, Y., Wang, X., and Xu, D. (2019). Face detec-
tion with different scales based on faster r-cnn. IEEE
Transactions on Cybernetics, 49(11):4017–4028.
Zhang, S., Chi, C., Lei, Z., and Li, S. (2020). Refineface:
Refinement neural network for high performance face
detection. IEEE transactions on pattern analysis and
machine intelligence, PP.
Zhang, S., Wen, L., Shi, H., Lei, Z., Lyu, S., and Li,
S. Z. (2019a). Single-shot scale-aware network for
real-time face detection. Int. J. Comput. Vision,
127(6–7):537–559.
Zhang, S., Zhu, X., Lei, Z., Shi, H., Wang, X., and Li, S. Z.
(2017). S
3
fd: Single shot scale-invariant face detec-
tor. CoRR, abs/1708.05237.
Zhang, Y., Wang, J., Miao, Z., Li, Y., and Wang, J. (2019b).
Shuffle single shot detector. In ICIC.
Zuiderveld, K. J. (1994). Contrast limited adaptive his-
togram equalization. In Graphics gems.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
320
