
Feature Map Upscaling to Improve Scale Invariance in Convolutional
Neural Networks
Dinesh Kumar
1 a
and Dharmendra Sharma
2 b
1
Faculty of Science & Technology, University of the South Pacific, Laucala Bay Road, Suva, Fiji
2
Faculty of Science & Technology, University of Canberra, 11 Kirinari Street, Canberra, ACT 2617, Australia
Keywords:
Convolutional Neural Network, Feature Map, Filter Pyramid, Global Feature, Scale Invariance, Visual System.
Abstract:
Efforts made by computer scientists to model the visual system has resulted in various techniques from which
the most notable has been the Convolutional Neural Network (CNN). Whilst the ability to recognise an object
in various scales is a trivial task for the human visual system, it remains a challenge for CNNs to achieve the
same behaviour. Recent physiological studies reveal the visual system uses global-first response strategy in its
recognition function, that is the visual system processes a wider area from a scene for its recognition function.
This theory provides the potential for using global features to solve transformation invariance problems in
CNNs. In this paper, we use this theory to propose a global-first feature extraction model called Stacked
Filter CNN (SFCNN) to improve scale-invariant classification of images. In SFCNN, to extract features from
spatially larger areas of the target image, we develop a trainable feature extraction layer called Stacked Filter
Convolutions (SFC). We achieve this by creating a convolution layer with a pyramid of stacked filters of
different sizes. When convolved with an input image the outputs are feature maps of different scales which are
then upsampled and used as global features. Our results show that by integrating the SFC layer within a CNN
structure, the network outperforms traditional CNN on classification of scaled color images. Experiments
using benchmark datasets indicate potential effectiveness of our model towards improving scale invariance in
CNN networks.
1 INTRODUCTION
Understanding a scene from just a single exposure is
a trivial task for the visual system (Han et al., 2017),
for example being able to recognise an object in vari-
ous scales (scaling), able to distinguish rotated objects
such as the ability to read signs on the wall while in
laying position (rotation) or identify a moving object
(translation). Efforts by computer scientists to model
this behaviour has resulted in various techniques from
which most notable in the last decade has been the
Convolutional Neural Network (CNN) (LeCun et al.,
1998). CNNs have achieved great success in numer-
ous computer vision tasks such as in image classifica-
tion, object detection and recognition, semantic seg-
mentation and boundary detection.
The short comings of CNNs however, are in its in-
ability to adequately handle invariances introduced in
similar images it has been trained on (Jaderberg et al.,
2015; Kauderer-Abrams, 2017; Lenc and Vedaldi,
a
https://orcid.org/0000-0003-4693-0097
b
https://orcid.org/0000-0002-9856-4685
2015). Invariance refers to the ability of recognis-
ing objects even when the appearance varies in some
ways as a result of transformations such as transla-
tions, scaling, rotation or reflection. Recent physi-
ological studies of the visual pathway reveal the vi-
sual system uses both local and global features in its
recognition function. Cells tuned to global features
respond to visual stimuli prior to cells tuned on lo-
cal features leading to suggestions of a global-first
response strategy of the visual system to speed-up
recognition (Huang et al., 2017; Su et al., 2009). This
theory provides the potential for using global features
combined with local features to solve transformation
invariance problems in CNNs.
In this paper, we address improving scale-
invariant classification in CNNs by exploiting the
global-first theory and propose a trainable feature
extraction layer called Stacked Filters Convolution
(SFC). The design of SFC layer enables the net-
work to extract global features extracted from spa-
tially larger areas of the target image. Inspired by the
work of (Peng et al., 2017), we apply the concept of
Kumar, D. and Sharma, D.
Feature Map Upscaling to Improve Scale Invariance in Convolutional Neural Networks.
DOI: 10.5220/0010246001130122
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
113-122
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
113

large filters (kernels) to cover broader areas of an im-
age during convolution operation. In SFC layer, we
create pyramids of stacked filters of different sizes.
The stacking of filters create a conical filter structure
referred to as filter pyramids. Input image data pass-
ing through SFC layer are convolved with each filter
resulting in feature maps of different scales. These
feature maps are then upscaled and used as global
features and passed to the next layer in the CNN net-
work. In this work, we refer to the integration of SFC
layer within an existing CNN as Stacked Filter CNN
(SFCNN) model.
We conduct extensive experiments to evaluate
scale invariance performance of SFCNN. We use
LeNet5 CNN (LeCun et al., 1998) as our benchmark
model. First, the datasets are trained on LeNet5 to
establish benchmark results for comparison. Then
we ensemble LeNet5 with SFC layer by placing it as
the first layer in LeNet5 feature extraction pipeline.
This location enables the SFC layer to pass fea-
tures extracted from spatially broader areas of the im-
age (global-first) into the CNN network for further
processing. We train the ensemble SFCNN on the
same datasets. We study the performance of SFCNN
in classifying image samples on specific scale cate-
gories. We also study the performance of SFCNN on
individual classes where images from various scales
per class are evaluated. For consistency we use the
same test samples on all models developed. In all our
case studies, performance of SFCNN are compared
with our benchmarks. Our results show SFCNN out-
performs traditional LeNet5 CNN in classifying color
images across majority of the scale categories. In ad-
dition, we report promising results on SFCNN’s abil-
ity to classify images in various scale levels for each
dataset class in particular for color images.
The main contributions of this paper are to im-
prove CNNs towards classification of scaled images
by showing the effectiveness of a) processing spa-
tially broader areas of an input image in the initial
stages of a CNN feature extraction pipeline, and b) en-
hancing features extracted by applying upscaling on
feature maps.
The rest of the paper is organised as follows: Sec-
tion 2 reviews related work while Section 3 introduces
our model. Section 4 describes our experiment design
and results are presented in Section 5. We summarise
and point to future directions in Section 6.
2 BACKGROUND
Use of Global Features in CNNs. While local fea-
tures are effectively extracted in CNNs using small
filters performing a patch-wise operation with the tar-
get image, extracting global features requires study-
ing the whole image or spatially larger areas of the tar-
get image. Here, local features are classified as lines
(edges) and curves while shape, colour and shape con-
tours are labelled as global features. In some stud-
ies, global features have been studied and applied in
CNNs but are limited to using feature descriptors such
as histogram of gradients (HOG) (Zhang et al., 2016)
and SIFT (Zheng et al., 2017). However, they have
not been tested on the networks ability to be spatially
invariant and also feature extractors such as HOG and
SIFT are non-trainable.
Use of Large Kernels in CNNs. The use of large
kernels to extract features from spatially broader areas
of the target image have been studied in some work.
In the area of semantic segmentation (Peng et al.,
2017) proposed a Global Convolutional Neural Net-
work in which they studied the use of large kernels.
Instead of directly applying large kernels as normal
convolutions, they used a combination of vector type
kernels of size 1 × k + k × 1 to connect with a large
k × k region in the feature map. They conducted their
experiments on PASCAL VOC dataset and concluded
that large kernels play an important role in both clas-
sification and localisation tasks. In their design, they
did not use any non-linearity after convolution layers
as is the practice in standard CNN models. In another
piece of work, (Park and Lee, 2016) inform extracting
information from a large area surrounding the target
pixel is essential to extract for example texture infor-
mation.
Pyramid based Methods in CNNs for Scale-
Invariant Classification. Pyramid based methods
have been used to address scale invariance in CNNs
to some extent but have been limited to either generat-
ing image pyramids or feature map pyramids. For ex-
ample, (Kanazawa et al., 2014) describe work where
they first create an image pyramid by scaling the tar-
get image and using the same filter to convolve all
scaled input. The feature maps generated are nor-
malised to obtain the same spatial dimensions and
then pooled to obtain a locally scale-invariant repre-
sentation. However, in their implementation, scaling
the target image is similar to applying scale augmen-
tation. In our work, we present no augmentation of
the input images. In another work, (Xu et al., 2014)
propose a scale-invariant CNN (SiCNN) by applying
a similar process of convolving a filter on different
image scales. (Lin et al., 2017) exploit the pyrami-
dal hierarchy of feature maps in deep convolutional
networks by developing lateral connections from each
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
114
p2
p3
p1
Fully Connected Layer
i
j
k
l
Classification
(E)
(A) Input image
(B) SFC Layer (a) pyramid of stacked filters, (b) feature
pyramids, (c) up-sampled features, (d) concatenated features
(B)
(C) (D)
Flatten
Convolution +
Maxpool Layer
(a)
(b) (c)
(d)
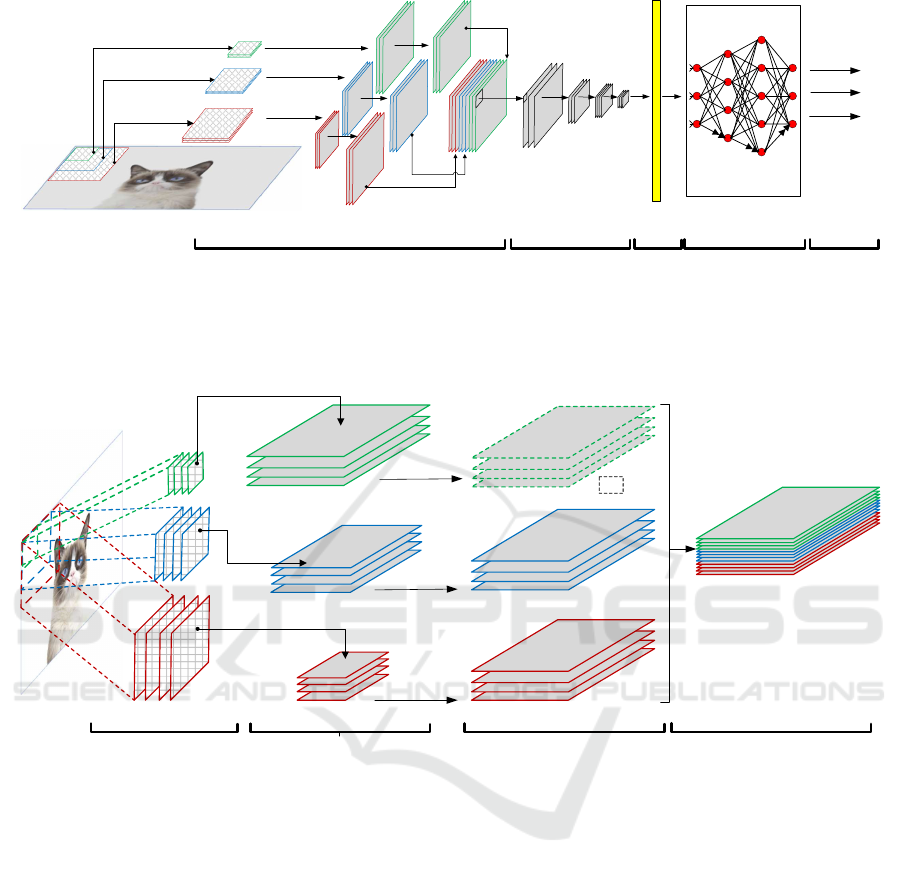
Figure 1: Architecture of SFCNN with k = 3 filters in SFC layer. An input image (A) is passed to the SFC layer (B) which
applies convolutions with each filter from the filter stack (a) producing f
1−3
output feature maps of different scales (b). The
output feature maps are then upsampled to generate uniform-sized outputs (c). The upscaled features are concatenated and
passed to the CNN network (C) for further feature extraction. The flatten layer (D) vectorises the final output from the CNN
network and forwards to the classifier for learning (D).
+
+
Upscaling
Upscaling
(A)
Stacked Filter Pyramid Feature Pyramid
(B) (C)
Upscaled Features
No upscaling
(a)
(b)
(c)
(d)
(e)
(f)
(D)
Concatenated Features
Figure 2: A detailed lateral view of the SFC layer with k = 3 filter stacks (A). Each stack in the filter pyramid contains
further n-filters. An input image is convolved using each filter from the filter stack producing k stacks of n output feature
maps of different sizes (B)-((a),(b),(c)). The feature maps are then upsampled to generate a uniform sized feature outputs
(C)-((d),(e),(f)). The upscaled features are finally concatenated (D) for forward propagation.
feature map in the pyramid to build high-level seman-
tic feature maps at all scales. They show that feature
pyramids generated in this way are scale-invariant as
a change in an object’s scale is offset by shifting its
level in the pyramid. Similar architectures are pro-
posed in works of (Kim et al., 2018; Zhao et al., 2019;
Kong et al., 2018).
Based on the concept of large kernels and pyramid
based methods, (Kumar and Sharma, 2020) propose a
distributed information integration CNN model called
D-Net by combining local and global features from
images. To extract global features, they developed
a trainable layer called Filter Pyramid Convolutions
(FPC). In FPC layer, various scale filters (from small
to large filters) are applied to progressively cover
broader areas of an image. The features extracted
are then pooled, resulting compact sized feature maps
as output in terms of its spatial dimension. This de-
sign limited the output of the FPC layer to be used
as input in subsequent convolution layers. In this pa-
per, we adopt a similar design as the FPC layer for
our SFC layer. However, to overcome the problem of
small scaled output feature maps from FPC layer, the
feature maps in SFC layer are instead upscaled. The
upscaled feature maps allows SFC layer output to be
used as input in subsequent feature extraction layers
of a CNN.
Whilst much progress and state-of-the-art results
are shown there is still little research that show the ef-
fectiveness of exposing a CNN with global view of in-
put images to solve scale-invariant classification prob-
lem in CNNs. This paper achieves to fill this gap.
Feature Map Upscaling to Improve Scale Invariance in Convolutional Neural Networks
115

3 MODEL
In this section we propose a novel method called
Stacked Filters Convolution (SFC) that allows a CNN
network take advantage of large kernels to extract
global features to improve classification of scaled im-
ages. The design of SFC layer is inspired by the work
of (Huang et al., 2017) who show that biological vi-
sual system utilizes global features prior to local fea-
tures in detection and recognition. The integration
of SFC layer within an existing CNN is referred to
as Stacked Filter CNN (SFCNN). The SFCNN model
comprises of five main parts (A-E) as shown in Figure
1. They are explained in the following sub-sections.
3.1 Stacked Filters Convolution (SFC)
Layer
Unlike in a traditional CNN where normally a small
filter is applied for each convolution in a convolution
layer, the SFC layer houses a battery of filters of vary-
ing sizes. This forms a pyramidal structure of stacked
filters and operates on the target image using the same
standard sliding window convolution technique (Fig-
ure 1(a)). The important part in the setup of SFC is
determining the sizes of each filter in the stack. Here,
the dimensions (k
h
,k
w
) of each filter in the stack is
manually chosen. The size of the largest filter (base of
the pyramid) (k
0
h
,k
0
w
) is carefully chosen so as to allow
the convolution to produce a 2D output map ( f
0
h
, f
0
w
)
(considering height and width only). It is required that
the output feature map size ( f
h
, f
w
) from each filter is
calculated after considering the other hyper parame-
ters stride and padding. The size of the next filter
(k
1
h
,k
1
w
) is chosen by determining the output size of
its resultant feature map ( f
1
h
, f
1
w
) where f
1
h
and f
1
w
is
a multiple of f
0
h
and f
0
w
respectively. This procedure
is required in order to allow upscaling of feature map
( f
0
h
, f
0
w
) by an integer upscaling factor. Subsequently
sizes of other filters are identified using a similar pro-
cess.
For example, for a 32×32 image, the filter sizes
chosen for the stack is 25×25, 17×17 and 3×3 with
upscaling factors 4, 2 and 1 respectively. Table 1 de-
scribes how the final output size of the SFC layer is
calculated after considering the filter sizes, upscaling
factors and appropriate uses of stride and padding on
the target image.
Since each filter produces a different size feature
map (Figure 1(b)), these maps then need to be nor-
malised to produce a uniform size final feature maps.
Here, we use the technique of upscaling and in our
work use the bilinear upscaling method. The smaller
feature maps are upscaled using a scale factor to pro-
duce an output equal to the largest feature map (Fig-
ure 1(c)). The largest feature map is unchanged. Ap-
plying this approach to the above example results in
the final output size as shown in Table 1. Finally all
upsampled feature maps are concatenated and passed
to the next layer (Figure 1(d)). In our implementation
since the SFC layer is the only layer that gets to in-
spect the target image, we maintain the inclusion of
a small filter in our stack. This is done to allow ex-
tracting local features from the target image which
we would otherwise lose. In this way, SFC layer
also allows local features to be collected and packed
together with global features for onward processing.
Figure 2 shows the lateral view of the components of
SFC layer and flow of information.
3.2 Forward Propagation Process in
SFC
To achieve the forward pass, an input image is passed
to the SFC layer which applies convolutions with each
filter from a filter stack and outputs a stack of feature
maps as a result. This process repeats for all stacks
of filters in the layer resulting in stacks of output fea-
ture maps of different scales accordingly. The stack
of output feature maps are then upsampled to gener-
ate uniform-sized outputs in terms of height and width
of the feature maps in all stacks. The upscaled stack
of features are finally concatenated for forward prop-
agation into the network. The shape of each stack of
upscaled features is saved for use in backward prop-
agation. Since the remainder of the network is com-
posed of traditional convolution, relu, max pooling,
flatten and fully connected neural network layers, the
forward propagation is as described in (LeCun et al.,
1998).
3.3 Backward Propagation Process in
SFC
The backward function in SFC layer receives gra-
dients from the network. It then unstacks or slices
the gradients in the exact same dimensions and shape
of the individual stack of feature maps that were
concatenated during the forward pass. This results
in stacks of gradients maps corresponding to each
stacked upscaled feature maps (during forward pass).
Each stack of gradient is max pooled by the same fac-
tor that was used to upscale the feature map to reduce
the dimensions of the feature maps. Using chain rule
derivative algorithm these gradients are then used to
update the weights of filters in the corresponding filter
stacks.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
116
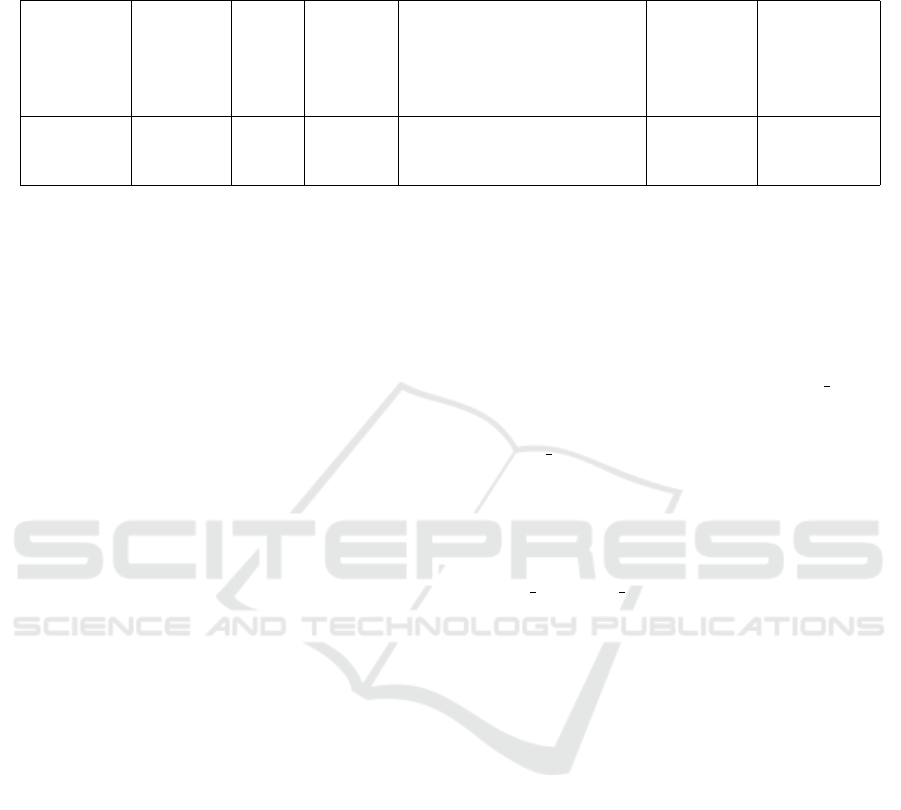
Table 1: Calculation of final output feature map sizes in the SFC layer. The output size of the intermediate feature map in
column (E) is dependent on the filter size (column (B)), stride and padding. It must also be a multiple of the sizes of other
output maps in column (E).
(A)
image size
(I
h
,I
w
)
(B)
filter size
k
h
,k
w
(C)
stride
s
(D)
padding
p
(E)
feature map output size
( f
h
, f
w
)
( f
h
= (I
h
+ 2p) − k
h
+ 1)/s
( f
w
= (I
w
+ 2p) − k
w
+ 1)/s
(F)
up-scaling
factor
(G)
final output
map size
(O
h
,O
w
)
32×32 25×25 1 0 8×8 4 32×32
32×32 17×17 1 0 16×16 2 32×32
32×32 3×3 1 1 32×32 1 32×32
4 THE EXPERIMENTS
We describe the datasets, CNN architecture, SFC pa-
rameters and our experimental design in the following
sub sections.
4.1 Dataset Description
Fashion-MNIST: The Fashion-MNIST (FMNIST)
dataset (Xiao et al., 2017) consists of 60,000 train-
ing images and 10,000 test images of fashion prod-
ucts from 10 categories. The sample images are grey-
scale (1-channel) of size 28×28 pixels. The training
and test batches have equal distribution of the number
of samples from each class.
CIFAR10. CIFAR10 dataset (Krizhevsky et al.,
2009) consists of 60,000 colour images of size 32×32
pixels with 3-channels. The dataset is divided into
50,000 training and 10,000 test samples. The samples
are divided into 10 mutually exclusive classes defin-
ing various objects. The train and test batch contain
equal number of images from each class.
4.2 CNN Architecture and SFC
Parameters
For benchmarking and also for combining global fea-
tures through SFC to a CNN network we used LeNet5
CNN structure as described below.
LeNet5 Network. Proposed by (LeCun et al.,
1998), the LeNet5 network in our work comprises of
three sets of convolution layers and two max pool-
ing layers. The architecture is described in Table 2.
Since we are using two datasets with different dimen-
sions for the input images (32×32 for CIFAR10 and
28×28 for FMNIST) the hyper-parameter padding
for the second convolutional layer in the LeNet5 net-
work trained on CIFAR10 is set to 1. For LeNet5
model trained on FMNIST, padding for the first and
second convolutional layers is set to 2 and 1 respec-
tively.
SFC Parameters. For training on CIFAR10 dataset
we setup SFC layer with 3 stacks of filters (k stacks =
3) having filters of sizes (3 × 3), (17 × 17) and (25 ×
25) respectively. Each stack is initialised with 6
filters (n f ilters = 6). We set stride = 1 for all
stacks, padding = 1 for stack with 3 × 3 filters,
padding = 0 for the rest of the stacks and upscal-
ing factors 4,2,1 respectively for each filter stack.
The final shape of the concatenated stacks of feature
maps on CIFAR10 dataset is (18 × 32 × 32) where
18 = k stacks × n f ilters. On FMNIST dataset, we
use the same values for parameters in SFC except
the filter sizes in each stack are changed to (3 × 3),
(15 × 15) and (22 × 22). The final shape of the con-
catenated stacks of feature maps on FMNIST dataset
is (18 × 28 × 28).
4.3 Training Process
First we train the benchmark CNN (LeNet5) on CI-
FAR10 and FMNIST datasets separately. This estab-
lishes our benchmark results against which we com-
pare results of SFCNN networks. Then we integrate
SFC layer within LeNet5 network pipeline as de-
scribed in Figure 1. We train SFCNN using the same
training parameters as used on LeNet5 resulting in
SFCNN models for CIFAR10 and FMNIST datasets
respectively. Hence, we obtain a total of four trained
models for comparison (two models per dataset).
End-to-end training was performed on all models.
For networks trained on CIFAR10 dataset we start
with a warm-up strategy for 4 epochs with a learning
rate of 10
−2
, 10
−3
from epochs 5-50 and decreasing
it to 10
−4
for the rest of training. For training on FM-
NIST dataset the learning was adjusted to 10
−2
for 2
epochs, 10
−3
from epochs 3-50 and decreasing it to
Feature Map Upscaling to Improve Scale Invariance in Convolutional Neural Networks
117

10
−4
for the rest of training. Training on all models
were stopped at 100 epochs. Stochastic gradient de-
cent and cross-entropy were used as learning and loss
function respectively. We use weight decay of 10
−4
and momentum of 0.9. For training we use batch size
of 8 and 4 for testing. We implemented our mod-
els using PyTorch version 1.2.0 on a Dell Optiplex
i5 48GB RAM computer with Cuda support using
NVIDIA GeForce GTX 1050 Ti 4GB graphics card.
4.4 Preparing Scaled Images for Testing
Models
To test our models on scaled images we first establish
7 scale categories - [150,140, 120, 100,80,60,50].
The numbers indicate percentage an image is scaled
to. In this research we consider both reduction and
enlargement of image size from the original. We se-
lect at random 100 images per class from CIFAR10
and FMNIST test datasets. Then, we scale each im-
age to a size defined in our scale category list. Since
the images in our dataset are small we stop at scale
50%. In this fashion for a single test image of a class
we generate 7 scaled test images. Each scaled im-
age is allocated to its own class and scale category
folder resulting in 1000 scaled images in each of the
7 scaled categories. We further pool all images from
all 7 scale categories into an ensemble test dataset re-
sulting in 7000 scaled images. We analyse our mod-
els on scaled images from each of these scale cate-
gories independently (Section 5.2). Finally we use
the ensemble dataset to analyse the performance of
our models for individual classes (Section 5.3). Fig-
ure 3 shows an example image from each dataset and
its corresponding scaled versions for testing. Table 3
provides detailed information on the number of scaled
images generated for testing.
Figure 3: An example of scaled test images from datasets
CIFAR10 - airplane (top) and FMNIST - ankle boot (bot-
tom). The numbers indicate percentage image is scaled to.
100 indicates no scaling.
4.5 Evaluation Metrics
Analysis on Scale Categories. We use metrics pre-
cision, recall and accuracy to analyse results of
SFCNN on scale categories. Since we do not have
imbalanced class distribution in our datasets we use
macro-average weighting to calculate precision and
recall.
Analysis on Dataset Classes. We use metrics sen-
sitivity (recall) and specificity to analyse results
of SFCNN for scaled images in individual dataset
classes.
5 RESULTS AND DISCUSSION
5.1 Comparing Model Training
Statistics on Regular Images
Table 4 compares the train losses and test accuracy
for all the networks used in our experiments on reg-
ular images from the test datasets. These are evalu-
ations on images that have not been subjected to any
form of scale transformations. Our ensemble SFCNN
model outperforms the traditional LeNet5 network on
test accuracy metrics (indicated in bold). The highest
test accuracy increase of 2.3% is recorded on SFCNN
on CIFAR10 dataset. This indicates combining global
feature information in network training is useful in
improving the overall generalisation capability of the
models, in particular for color images.
5.2 Effects of Feature Map Upscaling
on Classification of Scaled Images
The classification results of our models on differ-
ent scale categories and on different datasets can be
viewed in Tables 5 and 6. From these results, we ar-
rive at three observations.
First, classification accuracies on CIFAR10 scaled
categories obtained by SFCNN networks show the in-
clusion of the SFC layer as a global feature extrac-
tor, gives promising results in classification of scaled
imaged. SFC provides significant improvement in
the overall network’s ability to classify scaled images
compared to the benchmark LeNet5 network. The
column hit-rate in Tables 5 and 6 indicate the number
of scale categories SFCNN outperformed the bench-
mark. For purposes of our study hit-rate of >= 50%
is desirable, that is SFCNN should at least perform
better on 50% of the scale categories compared to the
benchmark LeNet5 only network. Since the ensemble
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
118
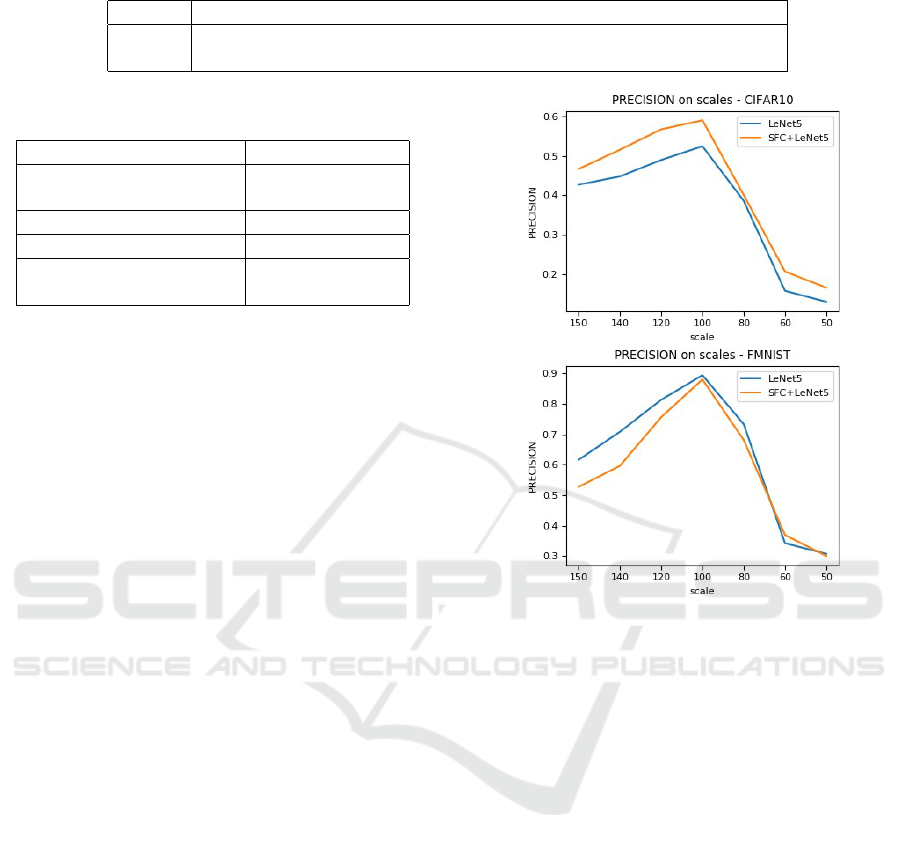
Table 2: Architecture of LeNet5 network used in our experiments (Hosseini et al., 2017).
Model Layers
LeNet5
(conv 5x5x6) → (maxpool 2x2) → (conv 5x5x16) → (maxpool 2x2) →
(conv 5x5x120) → (fc 84) → (fc 10) → softmax
Table 3: Information on scaled images generated for testing
our models.
Number of classes 10
Scale categories
150,140,120,100,
80,60,50
Image per class 100
Total images per category
1000
Total ensemble images
over all scale categories
7000
test dataset combines all scaled images in one batch it
is excluded from this ratio. The hit-rate on CIFAR10
accuracy scores are > 70% which is well above the
desired threshold meaning the model was able to iden-
tify a higher number of samples in its correct class
despite the images being scale transformed. Since
we apply bilinear upscaling of feature maps in SFC
layer which enlarges the extracted features, we test
the effects of this operation particularly on the scale
reduced images (categories 80, 60 and 50 in Tables
5 and 6). We observe SFCNN on overall performs
better than LeNet5 on these scale categories, specif-
ically on scale category 80 where the test accuracy
is higher by 8.6%. Performance on SFCNN on FM-
NIST scale categories however are not very promising
where LeNet5 benchmark results are higher. This in-
dicates SFCNN works better on color images than on
grey-scale images.
Second, macro-average precision reveals SFC-
NNs ability to classify a high number of scaled im-
ages identified as positive to be actually positive.
On CIFAR10 dataset, SFCNN achieves a hit-rate of
100% over all scale categories. On the contrary
we observe the benchmark LeNet5 model performing
better on FMNIST dataset compared to on CIFAR10.
These results further show SFCNNs ability to classify
color scaled images better but at the same time its in-
ability to achieve a similar performance on grey-scale
images. We also note in general precision scores of
both SFCNN and the benchmark LeNet5 models de-
cline with increasing scale reduction (Figure 4).
Third, macro-average recall statistics of all models
on both datasets are identical to the accuracy scores.
While this shows SFCNNs superior ability to return
most of the relevant results in nearly all scale cat-
egories compared to the benchmark LeNet5 on CI-
FAR10 dataset, LeNet5 on the other hand has higher
recall scores on FMNIST grey-scale images.
Figure 4: Drop in precision with declining scale of images.
5.3 Performance of SFCNN on
Individual Classes
The classification results of the studied models on en-
semble scaled test set evaluated on datasets classes
can be viewed in Tables 7 and 8. From these results,
we arrive at two observations.
First, sensitivity (recall) scores on SFCNN net-
work have reasonable hit-rate (50%) showing bet-
ter performance on most classes than the benchmark
LeNet5 models on CIFAR10. This is however not
consistent on both datasets where the hit-rate on sen-
sitivity score on FMNIST dataset is below our desired
50% threshold. Here hit − rate is the ratio of counting
the number of classes SFCNN produced a higher sen-
sitivity score than the benchmark LeNet5 to the total
number of classes. Though comparatively achieving
higher sensitivity scores than the benchmarks on CI-
FAR10 dataset, we note that the scores for majority of
the classes in both datasets are low (below 50%). We
investigated the false negative (FN) and true positive
(TP) scores to reveal FN scores to be higher than TP
for several classes but not in all. This is also true on
the benchmark LeNet5.
Feature Map Upscaling to Improve Scale Invariance in Convolutional Neural Networks
119

Table 4: Train losses and test accuracy for all models used in our experiments.
Model
train loss
CIFAR10
test acc
CIFAR10
difference
train loss
FMNIST
test acc
FMNIST
difference
LeNet5 1.734 0.568 1.535 0.899
SFCNN 1.733 0.591
-0.001 (loss)
+2.3% (acc)
1.566 0.901
+0.031 (loss)
+0.2% (acc)
Table 5: Performance summarization of the studied models on all the scale categories on CIFAR10 dataset.
scale categories
Model metric ensemble 150 140 120 100 80 60 50
hit
rate
LeNet5
acc
0.381 0.449 0.478 0.531 0.577 0.265 0.217 0.149 0.714
SFCNN 0.394 0.438 0.487 0.547 0.586 0.351 0.193 0.159 (5/7)
LeNet5
precision
0.388 0.427 0.448 0.490 0.525 0.386 0.157 0.129 1.000
SFCNN 0.419 0.467 0.516 0.568 0.591 0.401 0.206 0.165 (7/7)
LeNet5
recall
0.381 0.449 0.478 0.531 0.577 0.265 0.217 0.149 0.714
SFCNN 0.394 0.438 0.487 0.547 0.586 0.351 0.193 0.159 (5/7)
Second, our tests results show specificity scores
on overall are higher than sensitivity scores for all
classes on both datasets and for each of the tested
models. This is also true on the benchmark LeNet5
network. We investigated the true negative (TN) and
false positive (FP) scores to reveal TN scores to be
higher than FP for all classes. These results are
promising as high TN scores indicates SFCNN is able
to produce a high number of correctly predicted neg-
ative values. Comparatively SFCNN network on CI-
FAR10 performed better on specificity than the same
networks on FMNIST dataset when considering the
hit-rate indicating better performance on color than
grey-scale images.
5.4 Model Complexity
The advantage of SFCNN lies in the application of
larger kernels that are used to detect features from
spatially larger areas of the input image. This over-
comes the shortcomings of standard CNNs that usu-
ally address a small area of the input image or fea-
ture map at a time using smaller kernels. However,
the limitations of SFCNN include a) an increase in
network parameters due to the use of large kernels
in the SFC layer, b) the SFC layer generates larger
feature maps as a result of upscaling which in turn
requires more convolution operations in the network,
c) increase in the volume of feature maps due to con-
catenation of upscaled features maps in the SFC layer,
and d) the model is still not able to inspect the entire
image globally due to design constrains of the kernels
in the filter pyramid. Limitations a), b) and c) further
lead to increased computation time.
6 CONCLUSION
In this work we propose a method to learn scale in-
variance in CNNs by introducing a new technique of
using large kernels to extract spatial information from
the target image and combine it with local features for
learning by the network. The proposed method called
Stacked Filters Convolution (SFC) uses a stack of
large and small filters arranged in a pyramidal struc-
ture. Each group of filters from the stack is convolved
with the input image producing feature maps of dif-
ferent scales. These feature maps are upscaled to pro-
duce a uniform sized output map which is then passed
to the next layer.
We study the effects of global-first feature ex-
traction by adding the SFC layer and evaluating the
networks ability to classify test images subjected to
scale transformations and compare with our bench-
mark. Our results show overall improvements in clas-
sification of scaled images in comparison to classifi-
cation results from our benchmark networks. Further,
the results also indicate better performance of ensem-
ble SFCNN network on color images than on grey-
scale images. From our experimental results we con-
clude that spatial features extracted from larger areas
of the target image during training help in improving
the scale invariance capability of CNN networks, in
particular for color images.
Problems and opportunities that require further in-
vestigations are to evaluate other upscaling methods
as information may be lost due to the type of inter-
polation method used, test this technique to evaluate
other forms of transformations such as rotations and
translations and apply SFC layer with other bench-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
120

Table 6: Performance summarization of the studied models on all the scale categories on FMNIST dataset.
scale categories
Model metric ensemble 150 140 120 100 80 60 50
hit
rate
LeNet5
acc
0.611 0.575 0.654 0.785 0.895 0.703 0.373 0.295 0.000
SFCNN 0.566 0.480 0.573 0.743 0.880 0.647 0.369 0.267 (0/7)
LeNet5
precision
0.676 0.616 0.708 0.813 0.894 0.733 0.342 0.307 0.142
SFCNN 0.579 0.527 0.596 0.756 0.880 0.681 0.369 0.300 (1/7)
LeNet5
recall
0.611 0.575 0.654 0.785 0.895 0.703 0.373 0.295 0.000
SFCNN 0.566 0.480 0.573 0.743 0.880 0.647 0.369 0.267 (0/7)
Table 7: Performance summarization of the studied models on CIFAR10 classes.
[CIFAR10 classes] [Scale category - ensemble]
Model
air-
plane
auto-
mobi
le
bird cat deer dog frog horse ship truck
hit
rate
metric - sensitivity scores -
LeNet5 0.353 0.469 0.000 0.377 0.316 0.439 0.624 0.339 0.430 0.463
SFCNN 0.389 0.517 0.240 0.469 0.273 0.374 0.559 0.317 0.439 0.379
0.500
(5/10)
metric - specificity scores -
LeNet5 0.970 0.972 1.000 0.854 0.957 0.838 0.887 0.943 0.962 0.929
SFCNN 0.959 0.946 0.950 0.856 0.974 0.890 0.920 0.961 0.926 0.946
0.600
(6/10)
Table 8: Performance summarization of the studied models on FMNIST classes.
[FMNIST classes] [Scale category - ensemble]
Model
t-shirt
-top
tro-
user
pull-
over
dress coat
san-
dal
shirt
snea-
ker
bag
ankle-
boot
hit
rate
metric - sensitivity scores -
LeNet5 0.796 0.824 0.424 0.521 0.303 0.933 0.206 0.510 0.926 0.671
SFCNN 0.531 0.734 0.303 0.727 0.313 0.857 0.179 0.561 0.750 0.700
0.400
(4/10)
metric - specificity scores -
LeNet5 0.851 0.999 0.957 0.988 0.981 0.894 0.974 0.993 0.936 0.994
SFCNN 0.939 0.991 0.960 0.901 0.970 0.932 0.966 0.968 0.900 0.990
0.300
(3/10)
mark network configurations using larger and more
complex datasets.
REFERENCES
Han, Y., Roig, G., Geiger, G., and Poggio, T. A. (2017).
Is the human visual system invariant to translation
and scale? In 2017 AAAI Spring Symposia, Stanford
University, Palo Alto, California, USA, March 27-29,
2017.
Hosseini, H., Xiao, B., Jaiswal, M., and Poovendran, R.
(2017). On the limitation of convolutional neural net-
works in recognizing negative images. In 2017 16th
IEEE International Conference on Machine Learning
and Applications (ICMLA), pages 352–358. IEEE.
Huang, J., Yang, Y., Zhou, K., Zhao, X., Zhou, Q., Zhu, H.,
Yang, Y., Zhang, C., Zhou, Y., and Zhou, W. (2017).
Rapid processing of a global feature in the on visual
pathways of behaving monkeys. Frontiers in Neuro-
science, 11:474.
Jaderberg, M., Simonyan, K., Zisserman, A., and
Kavukcuoglu, K. (2015). Spatial transformer net-
works. In Cortes, C., Lawrence, N. D., Lee, D. D.,
Sugiyama, M., and Garnett, R., editors, Advances
in Neural Information Processing Systems 28, pages
2017–2025. Curran Associates, Inc.
Kanazawa, A., Sharma, A., and Jacobs, D. W. (2014). Lo-
cally scale-invariant convolutional neural networks.
CoRR, abs/1412.5104.
Kauderer-Abrams, E. (2017). Quantifying translation-
invariance in convolutional neural networks. arXiv
preprint arXiv:1801.01450.
Feature Map Upscaling to Improve Scale Invariance in Convolutional Neural Networks
121

Kim, S.-W., Kook, H.-K., Sun, J.-Y., Kang, M.-C., and Ko,
S.-J. (2018). Parallel feature pyramid network for ob-
ject detection. In Proceedings of the European Con-
ference on Computer Vision (ECCV), pages 234–250.
Kong, T., Sun, F., Tan, C., Liu, H., and Huang, W. (2018).
Deep feature pyramid reconfiguration for object de-
tection. In Proceedings of the European Conference
on Computer Vision (ECCV), pages 169–185.
Krizhevsky, A., Hinton, G., et al. (2009). Learning multiple
layers of features from tiny images. Technical report,
Citeseer.
Kumar, D. and Sharma, D. (2020). Distributed information
integration in convolutional neural networks. In Pro-
ceedings of VISAPP. INSTICC, SciTePress.
LeCun, Y., Bottou, L., Bengio, Y., Haffner, P., et al. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Lenc, K. and Vedaldi, A. (2015). Understanding image
representations by measuring their equivariance and
equivalence. CVPR.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Park, H. and Lee, K. M. (2016). Look wider to match im-
age patches with convolutional neural networks. IEEE
Signal Processing Letters, 24(12):1788–1792.
Peng, C., Zhang, X., Yu, G., Luo, G., and Sun, J. (2017).
Large kernel matters–improve semantic segmentation
by global convolutional network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 4353–4361.
Su, Y., Shan, S., Chen, X., and Gao, W. (2009). Hierar-
chical ensemble of global and local classifiers for face
recognition. IEEE Transactions on image processing,
18(8):1885–1896.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
MNIST: a Novel Image Dataset for Benchmarking
Machine Learning Algorithms. Technical report,
arXiv.
Xu, Y., Xiao, T., Zhang, J., Yang, K., and Zhang, Z. (2014).
Scale-invariant convolutional neural networks. CoRR,
abs/1411.6369.
Zhang, T., Zeng, Y., and Xu, B. (2016). Hcnn: A neural net-
work model for combining local and global features
towards human-like classification. International Jour-
nal of Pattern Recognition and Artificial Intelligence,
30(01):1655004.
Zhao, Q., Sheng, T., Wang, Y., Tang, Z., Chen, Y., Cai, L.,
and Ling, H. (2019). M2det: A single-shot object de-
tector based on multi-level feature pyramid network.
In Proceedings of the AAAI Conference on Artificial
Intelligence, volume 33, pages 9259–9266.
Zheng, L., Yang, Y., and Tian, Q. (2017). Sift meets cnn:
A decade survey of instance retrieval. IEEE trans-
actions on pattern analysis and machine intelligence,
40(5):1224–1244.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
122
