
Gait Phases Detection in Elderly using Trunk-MIMU System
Elisa Digo
1a
, Valentina Agostini
2b
, Stefano Pastorelli
1c
, Laura Gastaldi
3d
and Elisa Panero
4e
1
Department of Mechanical and Aerospace Engineering, Politecnico di Torino, Turin, Italy
2
Department of Electronics and Telecommunications, Politecnico di Torino, Turin, Italy
3
Department of Mathematical Sciences “G.L. Lagrange”, Politecnico di Torino, Turin, Italy
4
Department of Surgical Sciences, Università degli Studi di Torino, Turin, Italy
Keywords: Gait Phases, Elderly Population, MIMU, Walking Condition, Accuracy.
Abstract: The increasing interest towards wearable Magnetic Inertial Measurement Units (MIMUs) for gait analysis is
justified by their low invasiveness, confirmed repeatability and complete independence from laboratory
constraints. However, some crucial doubts about the identification of a suitable sensor set-up and algorithm
in different gait conditions and populations still exist. In this context, the principal aim of the present study
was to investigate the effect of different walking conditions on the accuracy of gait phases detection with a
trunk-MIMU system. Eleven healthy elderly subjects performed gait trials in four different walking conditions
(fast speed, normal speed, slow speed and normal speed with dual-task). A stereophotogrammetric system
was adopted as gold standard. The accuracy of the estimation of stance and swing phases was evaluated from
the comparison of trunk-MIMU to the stereophotogrammetric system. Mean error values smaller than 0.03 s
confirmed the accuracy of the trunk-MIMU algorithm for an elderly population. Consequently, trunk-MIMU
system can be considered suitable for the characterization of gait phases in elderly subjects regardless of
walking conditions.
1 INTRODUCTION
During the last decades, different applications
highlighted the central role of locomotion in human
daily activities, generating a strong interest towards
gait analysis. Several studies have been directed to
assess standard gait patterns (Davis 1997), to identify
the conditioning factors (Hebenstreit et al. 2015), to
select systems and set-ups (Benndorf, Gaedke, and
Haenselmann 2019), as to characterize human gait
phases and kinematics (Kadaba et al. 1989). In
particular, clinical gait analysis is usually aimed at
monitoring rehabilitation processes (Moon et al.
2017), characterizing normal and pathological
locomotion (Prakash, Kumar, and Mittal 2018;
Shirakawa et al. 2017) and verifying therapeutic
treatments (Gastaldi et al. 2015). The objective
measurement of gait parameters supports clinical
a
https://orcid.org/0000-0002-5760-9541
b
https://orcid.org/0000-0001-5887-1499
c
https://orcid.org/0000-0001-7808-8776
d
https://orcid.org/0000-0003-3921-3022
e
https://orcid.org/0000-0002-5555-5818
experts during the observational assessment of gait.
Human locomotion can be mainly described by the
identification of two gait events: the heel strike (HS)
and the toe off (TO). In detail, the detection of gait
events allows first to divide each walking trial into
consecutive cycles, then to estimate different gait
phases. The gait cycle (GC) of each limb can be
mainly divided in stance and swing phases. The first
one starts with the load acceptance from the foot and
lasts the entire time the foot is in contact with the
ground, while correspondingly the limb bears part or
whole human weight. The swing phase depicts the
time period of foot oscillation without floor contact.
Durations of stance and swing phases are expressed
as percentages of the GC duration. Generally, in
healthy adults the stance phase represents
approximatively the 60% of the GC, while the swing
phase the 40% of the GC.
58
Digo, E., Agostini, V., Pastorelli, S., Gastaldi, L. and Panero, E.
Gait Phases Detection in Elderly using Trunk-MIMU System.
DOI: 10.5220/0010256400580065
In Proceedings of the 14th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2021) - Volume 1: BIODEVICES, pages 58-65
ISBN: 978-989-758-490-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Stance and swing phases can be crucially
influenced by gait velocities, external disturbs or
dual-tasks (Liu et al. 2014). In addition, previous
studies highlighted the aging effect on gait phases
(Aboutorabi et al. 2016). Healthy elderly people
demonstrated a compensatory strategy to overcome
instability and loss of control through the variation of
spatio-temporal parameters. The percentage duration
of the stance phase is increased, entailing a reduced
percentage duration of the swing phase. More in
general, in clinics, altered patterns of locomotion are
assessed by a different percentage distribution of time
in the two phases (Trojaniello et al. 2014). Another
important aspect of pathological gait is the symmetry
between right and left limbs. However, reduced
symmetry is not clearly associated with age in healthy
elderly populations (Aboutorabi et al. 2016).
During past decades, several tools have been used
for the analysis of human locomotion, especially to
add an objective measure to the observational gait
evaluation (Akhtaruzzaman, Shafie, and Khan 2016).
Literature confirms optoelectronic systems as the
gold standard technology thanks to their high
accuracy and precision. Several improvements,
methodologies and innovative biomechanical models
are proposed nowadays to be implemented with
optoelectronic systems for deeper kinematic and
dynamic investigations (Panero, Gastaldi, and Rapp
2018). However, these systems have some crucial
disadvantages, as the cost, the restriction to the
laboratory environment and the required expert
operation.
Recently, wearable sensor technologies such as
Magnetic Inertial Measurement Units (MIMUs) have
shown promising results in measuring human body
motion with limited cost and invasiveness, with a
good reliability and without laboratory constraints
(Cereatti, Trojaniello, and Croce 2015; Digo et al.
2020; Petraglia et al. 2019; G. Yang et al. 2019). The
use of wearable systems may be more suitable for
monitoring the subject for longer observation periods
and during daily activities. However, some open
issues related to MIMUs still exist, such as the
definition of a suitable and reliable set-up (S. Yang
and Li 2012) and the implementation of a robust
algorithm for gait phases identification (Caldas et al.
2017) that can be used in different conditions. Several
previous studies have proposed MIMUs set-ups and
algorithms to assess gait parameters both in healthy
and pathological subjects.
A previous pilot study has been conducted with
three healthy young subjects performing gait trials for
the evaluation of two MIMUs set-ups and associate
algorithms for gait events detection (Panero et al.
2018). In the first set-up one MIMU was positioned
on the trunk, while in the second set-up two MIMUs
were fixed on heels. Results have demonstrated the
suitability of the two MIMUs set-ups and algorithms,
but the set-up involving the trunk-MIMU showed the
best accuracy and simplest usage. Considering these
results and concentrating on the trunk-MIMU set-up,
the analysis has been extended to a larger population
of healthy elderly subjects, in order to validate the
robustness of the algorithm in different walking
conditions.
Consequently, the aim of the current study deals
with the analysis of gait speeds and conditions effects
on the accuracy of gait phases detection with a trunk-
MIMU system. Eleven healthy subjects over 65 years
old performed gait trials in four different walking
conditions. Stance and swing phases have been
monitored as outcomes of interest. Accuracy and
error quantification, obtained from the comparison of
trunk-MIMU results with an optoelectronic reference
system, are analysed.
2 MATERIALS & METHODS
2.1 Participants
Eleven healthy elderly subjects (4 males and 7
females) participated in the research after giving their
written informed consent. Four inclusion criteria were
considered: (i) age over 65 years old, (ii) no declared
neurological disorders, (iii) no musculoskeletal
diseases in the last five years and (iv) no internal
prostheses. The study was approved by the Local
Institutional Review Board. All procedures were
conformed to the Helsinki Declaration. Mean and
standard deviation values of subjects’ age, height,
weight and Body Mass Index (BMI) are reported in
Table 1.
Table 1: Subjects’ data (mean ± standard deviation).
Age
(y
ears
)
Height
(
m
)
Weight
(
k
g
)
BMI
(
k
g
/m
2
)
68.8 ± 5.0 1.6 ± 0.1 70.3 ± 14.9 25.8 ± 3.1
2.2 Instruments
Two motion capture systems were adopted for the
study: an inertial system consisting of one MIMU and
a stereophotogrammetric system composed of six
infrared cameras and nine passive reflective markers.
Gait Phases Detection in Elderly using Trunk-MIMU System
59
2.2.1 Inertial System
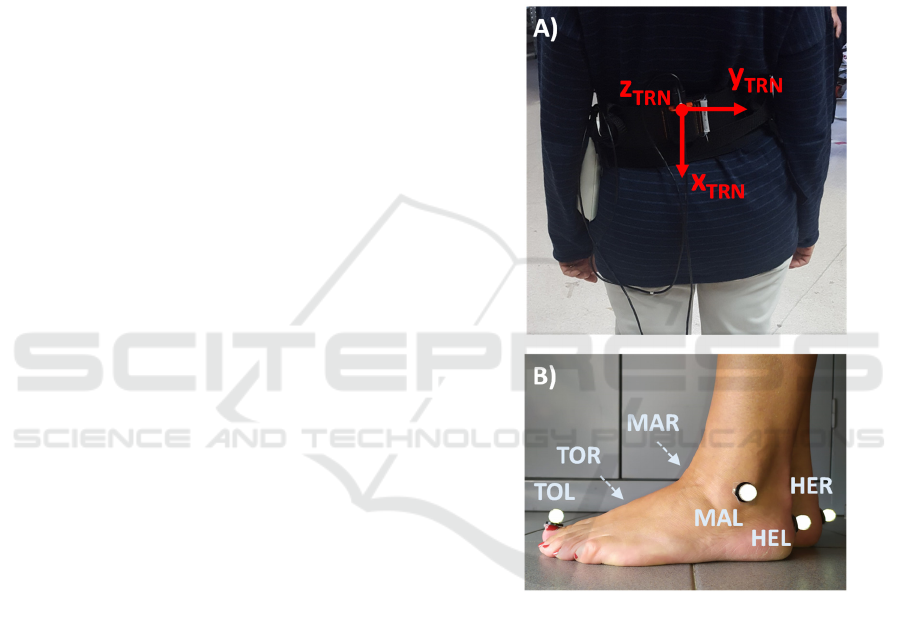
One MTx MIMU (Xsens, The Netherlands)
containing a tri-axial accelerometer (range ±5 G), a
tri-axial gyroscope (range ±1200 dps) and a tri-axial
magnetometer (±75 μT) was used for the test. The
MIMU was fixed on trunk (TRN) of participants at
the level of T12-L1 vertebrae, with an elastic band
provided by the Xsens kit. The sensor was oriented
with
the vertical x-axis pointing downward, the
medio-lateral y-axis directed to the right side of
participants and the anterior-posterior z-axis pointing
in the opposite direction of the gait (Figure 1A). The
MIMU was connected to the Xbus Master, the control
unit able to send data to the PC via Bluetooth. Data
were acquired through the Xsens proprietary software
(MT Manager) with a sampling frequency of 50 Hz.
2.2.2 Stereophotogrammetric System
The stereophotogrammetric system adopted for the
test was composed of two V120:Trio tracking bars
(OptiTrack, USA) and nine passive reflective markers
with a diameter of 14 mm. Each bar was self-
contained, pre-calibrated and equipped with three
cameras able to detect infrared light.
Six markers were fixed on feet of participants
with adhesive tape (Figure 1B): two on toes (right toe
= TOR, left toe = TOL), two on malleolus (right
malleolus = MAR, left malleolus = MAL) and two on
heels (right heel = HER, left heel = HEL). Other three
markers (A, B and C) were placed on the floor in
order to define the Global Coordinate System (GCS)
in which to report data recorded by the bars (Panero
et al. 2018). Each bar was connected to a separate PC.
Data acquisition was made with the OptiTrack
proprietary software (Motive) with a sampling
frequency of 120 Hz.
2.3 Protocol
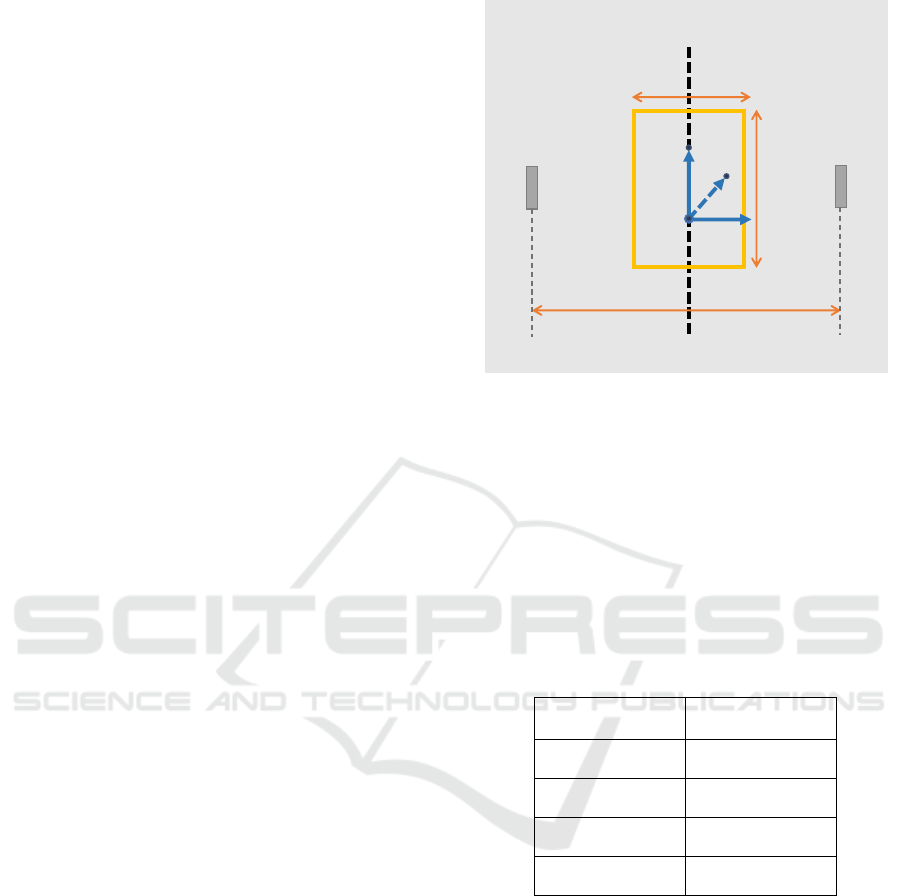
The experimental test was conducted indoor. The two
OptiTrack bars were located one in front of the other
parallel to a 6-meters linear walking path traced on
the floor. Consequently, the obtained captured area
was 2.5 m x 3.5 m, to guarantee the acquisition of at
least three steps for each transition in front of the
cameras. A static recording was made to obtain the
coordinates of the three fixed markers A, B, C on the
floor (Figure 2).
Participants were first asked to hit their right heel
on the floor to define an external event to synchronize
the stereophotogrammetric system and the inertial
system. Subsequently, subjects walked barefoot on
the linear path in four conditions. In the first three
conditions, they were asked to walk at different self-
selected speeds: fast, normal and slow. In the fourth
condition, participants were involved in a dual-task
condition at self-selected normal speed. While
walking, they were asked many questions about their
lives and habits. For each walking condition, all
subjects performed 26 transitions in front of the
cameras. The order of the four sets of walking
conditions was randomized for all subjects.
Coordinates of markers and signals of MIMUs were
acquired at the same time with the two motion capture
systems.
Figure 1: Configuration of trunk-MIMU (A) and markers
(B) on body of participants.
2.4 Signal Processing and Data
Analysis
Signal processing and data analysis were conducted
with customized Matlab routines. Considering the
static recording of markers on the floor, a
transformation matrix was built and used to express
in the GCS all markers trajectories collected during
gait sessions. Afterwards, the temporal
synchronization of data from the two motion capture
systems was guaranteed through the initial impact of
the right foot on the floor (Panero et al. 2018). Gait
events were then separately identified from data
BIODEVICES 2021 - 14th International Conference on Biomedical Electronics and Devices
60
acquired by the MIMU system and the optoelectronic
system. This detection was made with two algorithms
inspired by previous literature works. Considering the
optoelectronic system, HSs and TOs were identified
from horizontal and vertical coordinates of heels and
toes markers, respectively (Panero et al. 2018;
Veilleux et al. 2016). Since each bar captured the
lateral view of one side of the body, markers on
malleolus were used to distinguish between right and
left sides during gait. As regards the MIMU system,
gait events were identified from the anterior-posterior
acceleration signal of trunk-MIMU. More in detail,
HSs and TOs were detected as maximum and
minimum peaks of this signal, respectively (Panero et
al. 2018; Zijlstra and Hof 2003). In addition, the
distinction between right and left gait events was
made by considering the alternation sign of trunk-
MIMU angular velocity signal around the vertical
axis (McCamley et al. 2012; Panero et al. 2018).
For each subject, a total number of gait cycles
between 150 and 300 was collected. First, for each
participant in each testing condition, the average
walking velocity was calculated as the ratio between
the total gait path and the travel time. Then, for each
testing condition, inter-subjects mean and standard
deviation of walking speed values were estimated.
Afterwards, using gait events obtained with both
algorithms, spatio-temporal parameters of stance and
swing times were assessed for each gait cycle of each
participant in all walking conditions. For both stance
and swing times, mean and standard deviation values
were calculated intra- and inter-subjects for both right
and left sides. Moreover, the symmetry of participants
was evaluated by estimating the limp index as the
ratio between right and left stance times. According
to this confirmed symmetry, values of stance and
swing times were averaged between right and left
sides and represented through bar diagrams. In
addition, stance and swing durations were estimated
as percentages of the GC, in order to evaluate the
effect of age on gait phases distribution.
The accuracy of the MIMU algorithm was
evaluated as the relative error between the mean value
estimated with the optoelectronic system and the
mean value obtained with the MIMU system, for each
participant. Subsequently, inter-subjects mean values
of errors were calculated in all walking conditions.
The sign of the error allowed the differentiation
between overestimation (negative sign) and
underestimation (positive sign) with respect to the
reference value. Finally, a stem graph representation
was adopted in
order to compare errors for both
stance and swing times in different walking
conditions.
Figure 2: Top view of the setting with distance between
OptiTrack bars, measures of the capture volume, length of
walking path and GCS definition.
3 RESULTS
Table 2 depicts average and standard deviation values
of walking speed (m/s) for the tested population in all
the four conditions.
Table 2: Inter-subjects mean and standard deviation values
of walking speed (m/s) in four conditions.
Speed (m/s) Mean ± St. Dev.
Fast 1.16 ± 0.16
Normal 0.87 ± 0.12
Slow 0.74 ± 0.14
Dual 0.82 ± 0.15
Figure 3 shows inter-subjects mean and standard
deviation values of stance and swing times (s)
estimated with both OptiTrack and trunk-MIMU in
all walking conditions. In Figure 4, two stem graphs
represent mean errors for stance and swing times in
all walking conditions (red circle for fast speed, green
diamond for normal speed, blue square for slow speed
and black pentagram for dual-task).
Table 3 contains inter-subjects mean and standard
deviation values of limp index, stance duration (%
GC) and swing duration (% GC) obtained from the
two algorithms in all walking conditions.
Walking path
6 m
6.5 m
V120:Trio
V120:Trio
Capture volume
3.5 m
2.5 m
B
A
C
GCS
X
S
Y
Z
Gait Phases Detection in Elderly using Trunk-MIMU System
61

Figure 3: Stance time and swing time estimated in different
walking conditions with OptiTrack (blue) and trunk-MIMU
(orange) systems.
4 DISCUSSIONS
The main aim of the current study was to evaluate
how the accuracy and robustness of a trunk-MIMU
algorithm in gait phases identification are influenced
by four different walking conditions (speeds and
dual-task). In order to fulfill this purpose, inter-
subjects mean and standard deviation values of
walking speeds (Table 2) were calculated. As
reported by Aboutorabi and colleagues, a walking
speed of 1.30 m/s can be considered the standard
reference value for normal walking in healthy adults
(Aboutorabi et al. 2016). Moreover, they referred to
previous studies showing a loss of gait speed based
on age (1.2%/year). In the present work, inter-
subjects mean walking speed in normal condition
(0.87 m/s) confirms this reduction provoked by age.
Moreover, even the registered walking speed in fast
condition (1.16 m/s) is lower than the reference value
of normal walking speed in healthy adults. In the
dual-task condition, walking speed of subjects (0.82
m/s) was lower than the one of normal condition (0.87
m/s), but higher with respect to the slow speed
condition (0.74 m/s). This aspect could be justified
considering that participants were involved in
answering questions and consequently were less
focused on walking. Deeper investigation comparing
normal and dual-task conditions with a larger
population might demonstrate the significance of this
difference.
Figure 4: Errors of trunk-MIMU algorithm with respect to
OptiTrack for both stance time and swing time in the four
walking conditions.
The effect of age on symmetry has been
previously investigated by different studies
(Aboutorabi et al. 2016). In the present work, the
symmetry of participant was evaluated by estimating
the limp index in all walking conditions both with
trunk-MIMU and OptiTrack (Table 3). Since inter-
subjects mean values of limp index were always
around 1 as expected in a healthy gait, symmetry of
participants was confirmed. Consequently, right and
left values of stance time and swing time (Figure 3)
and percentage durations (Table 3) were averaged.
OptiTrack - MIMU (s)
Fast Norm Slow Dual
-0.05
0
0.05
OptiTrack - MIMU (s)
Stance time error
BIODEVICES 2021 - 14th International Conference on Biomedical Electronics and Devices
62

Table 3: Limp index, stance duration (%GC) and swing duration (%GC) estimated by OptiTrack and trunk-MIMU systems
in all walking conditions (inter-subjects mean ± standard deviation).
Fast Normal Slow Dual
OptiTrack
Trunk-
MIMU
OptiTrack
Trunk-
MIMU
OptiTrack
Trunk-
MIMU
OptiTrack
Trunk-
MIMU
Limp
index
1.01
(0.03)
1.01
(0.03)
1.00
(0.01)
1.01
(0.03)
1.01
(0.03)
1.00
(0.04)
1.00
(0.02)
1.01
(0.04)
Stance
duration
(%GC)
61.76
(1.42)
60.44
(1.61)
63.20
(1.66)
62.09
(2.40)
64.57
(1.70)
62.77
(2.01)
64.31
(1.71)
62.39
(2.13)
Swing
duration
(%GC)
38.24
(1.42)
39.56
(1.61)
36.80
(1.66)
37.91
(2.40)
35.43
(1.70)
37.23
(2.01)
35.69
(1.71)
37.61
(2.13)
Low cost, low invasiveness and confirmed
repeatability of inertial sensors make them a suitable
alternative to optoelectronic systems for gait analysis.
Despite large investigations and many applications,
some crucial gaps still exist for the identification of a
robust and accurate sensor set-up configuration and
algorithm that can be applied in different gait
conditions and populations. Considering young
subjects, the trunk-MIMU solution resulted to be the
most suitable one (Panero et al. 2018). In the present
study, stance time and swing time have been selected
as outcomes of interest for the validation of accuracy
and robustness of the trunk-MIMU algorithm and set-
up on an elderly population. As Figure 3 shows, both
stance time and swing time increase with the
reduction of gait speed. In the dual-task condition,
values of stance time and swing time are halfway
between the correspondent ones of normal and slow
speed conditions. Moreover, small standard deviation
values depict a repeatability of the measure inside the
tested sample of elderly subjects (Pacini Panebianco
et al. 2018). Considering the accuracy in gait phases
detection with the trunk-MIMU system with respect
to the OptiTrack one, bar diagrams of Figure 3 show
strong accordance between values of both stance time
and swing time in all walking conditions. This
correspondence could be evaluated with stem graphs
in Figure 4. Smaller errors were obtained for
conditions at fast (+0.01 s for stance time, -0.01 s for
swing time) and normal speeds (+0.01 s for stance
time, -0.01 s for swing time). Stance time error is
greater in dual-task condition (+0.03 s), while the
greater error for swing time was registered in slow
speed condition (-0.03 s). However, in all walking
conditions, errors are lower than 0.03 s for both
parameters. In addition, stance time is always
overestimated (positive sign of errors), while an
underestimation interests the swing time (negative
signs of errors). This aspect might be justified by the
later detection of toe off performed with the trunk-
MIMU, probably caused by less clear minimum
peaks of the signal. Nevertheless, the overestimation
of stance time and the underestimation of swing time
demonstrate the constancy of the gait cycle duration.
Better performance at fast and normal speeds could
be explained by an easier identification of peaks of
interest in acceleration and angular velocity signals
used for HSs and TOs detection. Despite this aspect,
the trunk-MIMU algorithm could be considered
accurate for gait phases detection also in elderly
subjects.
Considering Table 3, values of stance duration
and swing duration obtained as percentages of GC
were observed. Reference values of stance duration
and swing duration in normal gait are 60% and 40%
of the GC, respectively. The current elderly
population shows an increased stance duration
(around 63% GC for OptiTrack and 62% GC for
trunk-MIMU) and a consequent reduction of swing
duration (around 37% GC for OptiTrack and 38% GC
for trunk MIMU) in normal walking condition. In
faster walking speed, the reduction of stance duration
with respect to normal speed can be underlined with
both OptiTrack (around 62% GC) and trunk-MIMU
(around 60% GC), with a resulting increase of swing
phase duration. In slow walking speed, the increase
of stance duration with respect to normal speed can
be underlined with both OptiTrack (around 65% GC)
and trunk-MIMU (around 63% GC), with a resulting
reduction of swing phase duration. Finally, the
walking condition with dual-task shows percentage
times distribution similar to the slow speed condition,
both for OptiTrack and trunk-MIMU.
5 CONCLUSIONS
In conclusion, the presented analysis confirms that
the trunk-MIMU system is suitable for the
characterization of gait phases not only in healthy
young subjects (Panero et al. 2018), but also in an
healthy elderly population. The trunk-MIMU system
depicts small errors of stance time and swing time
Gait Phases Detection in Elderly using Trunk-MIMU System
63

calculation at different walking conditions, revealing
its accuracy and robustness. Moreover, the singular
MIMU configuration might reveal advantages in
terms of ease of use, limited cost and reduced
invasiveness. For all these reasons, the trunk-MIMU
system demonstrates to be a strategical and potential
alternative to traditional stereophotogrammetric
systems to evaluate gait phases.
The principal limitation of this study consists in
the involvement of a small sample of participants.
However, this limit is expected to be overcome in the
future, by testing a larger number of elderly subjects
and by considering the possibility to identify
subgroups based on gender, healthy conditions and
specific age.
Future perspectives will concentrate first on the
evaluation of additional spatio-temporal parameters,
including symmetry indices. Then, plans are to test
the same MIMU set-up and algorithm on pathological
populations, in order to define a complete protocol for
the evaluation of rehabilitation progress and
therapeutic treatments benefits.
REFERENCES
Aboutorabi, Atefeh et al. 2016. “The Effect of Aging on
Gait Parameters in Able-Bodied Older Subjects: A
Literature Review.” Aging Clinical and Experimental
Research 28(3): 393–405.
https://link.springer.com/article/10.1007/s40520-015-
0420-6 (September 29, 2020).
Akhtaruzzaman, Md, Amir Akramin Shafie, and Md
Raisuddin Khan. 2016. “GAIT ANALYSIS:
SYSTEMS, TECHNOLOGIES, and IMPORTANCE.”
Journal of Mechanics in Medicine and Biology 16(7).
Benndorf, Maik, Martin Gaedke, and Thomas
Haenselmann. 2019. “Towards Gait Analysis - Creating
a Setup for the Analyses under Laboratory Conditions.”
In ACM International Conference Proceeding Series,
New York, New York, USA: Association for
Computing Machinery, 1–5.
http://dl.acm.org/citation.cfm?doid=3341325.3342005
(September 29, 2020).
Caldas, Rafael et al. 2017. “A Systematic Review of Gait
Analysis Methods Based on Inertial Sensors and
Adaptive Algorithms.” Gait and Posture 57: 204–10.
Cereatti, Andrea, Diana Trojaniello, and Ugo Della Croce.
2015. “Accurately Measuring Human Movement Using
Magneto-Inertial Sensors: Techniques and
Challenges.” In 2nd IEEE International Symposium on
Inertial Sensors and Systems, IEEE ISISS 2015 -
Proceedings, Institute of Electrical and Electronics
Engineers Inc.
Davis, Roy B. 1997. “Reflections on Clinical Gait
Analysis.” In Journal of Electromyography and
Kinesiology, Elsevier, 251–57.
Digo, Elisa, Giuseppina Pierro, Stefano Pastorelli, and
Laura Gastaldi. 2020. “Evaluation of Spinal Posture
during Gait with Inertial Measurement Units.”
Proceedings of the Institution of Mechanical Engineers,
Part H: Journal of Engineering in Medicine 234(10):
1094–1105.
Gastaldi, Laura et al. 2015. “Effects of Botulinum
Neurotoxin on Spatio-Temporal Gait Parameters of
Patients with Chronic Stroke: A Prospective Open-
Label Study.” Eur J Phys Rehabil Med 51(5): 609–18.
Hebenstreit, Felix et al. 2015. “Effect of Walking Speed on
Gait Sub Phase Durations.” Human Movement Science
43: 118–24.
Kadaba, M. P. et al. 1989. “Repeatability of Kinematic,
Kinetic, and Electromyographic Data in Normal Adult
Gait.” Journal of Orthopaedic Research 7(6): 849–60.
https://onlinelibrary.wiley.com/doi/full/10.1002/jor.11
00070611 (September 29, 2020).
Liu, Yancheng et al. 2014. “Gait Phase Varies over
Velocities.” Gait and Posture 39(2): 756–60.
McCamley, John, Marco Donati, Eleni Grimpampi, and
Claudia Mazzà. 2012. “An Enhanced Estimate of Initial
Contact and Final Contact Instants of Time Using
Lower Trunk Inertial Sensor Data.” Gait and Posture
36(2): 316–18.
Moon, Sang Bok et al. 2017. “Gait Analysis of Hemiplegic
Patients in Ambulatory Rehabilitation Training Using a
Wearable Lower-Limb Robot: A Pilot Study.” Int J
Prec Eng and Manufacturing 18(12): 1773–81.
Pacini Panebianco, Giulia, Maria Cristina Bisi, Rita Stagni,
and Silvia Fantozzi. 2018. “Analysis of the
Performance of 17 Algorithms from a Systematic
Review: Influence of Sensor Position, Analysed
Variable and Computational Approach in Gait Timing
Estimation from IMU Measurements.” Gait and
Posture 66(April): 76–82.
https://doi.org/10.1016/j.gaitpost.2018.08.025.
Panero, E., E. Digo, V. Agostini, and L. Gastaldi. 2018.
“Comparison of Different Motion Capture Setups for
Gait Analysis : Validation of Spatio-Temporal
Parameters Estimation.” In MeMeA 2018 - 2018 IEEE
International Symposium on Medical Measurements
and Applications, Proceedings, Institute of Electrical
and Electronics Engineers Inc.
Panero, E, L Gastaldi, and W Rapp. 2018. “Two-Segments
Foot Model for Biomechanical Motion Analysis.” In
Mechanisms and Machine Science, Springer
Netherlands, 988–95.
Petraglia, Federica et al. 2019. “Inertial Sensors versus
Standard Systems in Gait Analysis: A Systematic
Review and Meta-Analysis.” Eur J of Phy and Rehab
Med 55(2): 265–80.
Prakash, Chandra, Rajesh Kumar, and Namita Mittal. 2018.
“Recent Developments in Human Gait Research:
Parameters, Approaches, Applications, Machine
Learning Techniques, Datasets and Challenges.”
Artificial Int Review 49(1): 1–40.
Shirakawa, Tomohiro et al. 2017. “Gait Analysis and
Machine Learning Classification on Healthy Subjects
BIODEVICES 2021 - 14th International Conference on Biomedical Electronics and Devices
64

in Normal Walking.” Int J Parallel, Emergent and
Distributed Systems 32(2): 185–94.
Trojaniello, Diana et al. 2014. “Estimation of Step-by-Step
Spatio-Temporal Parameters of Normal and Impaired
Gait Using Shank-Mounted Magneto-Inertial Sensors:
Application to Elderly, Hemiparetic, Parkinsonian and
Choreic Gait.” J NeuroEng and Rehab 11(1): 1–12.
Veilleux, Louis Nicolas et al. 2016. “Agreement of Spatio-
Temporal Gait Parameters between a Vertical Ground
Reaction Force Decomposition Algorithm and a
Motion Capture System.” Gait and Posture 43: 257–64.
http://dx.doi.org/10.1016/j.gaitpost.2015.10.007.
Yang, Gelan et al. 2019. “Review Wearable Sensing
System for Gait Recognition.” Cluster Computing
22(2): 3021–29.
Yang, Shuozhi, and Qingguo Li. 2012. “Inertial Sensor-
Based Methods in Walking Speed Estimation: A
Systematic Review.” Sensors 12(5): 6102–16.
Zijlstra, Wiebren, and At L. Hof. 2003. “Assessment of
Spatio-Temporal Gait Parameters from Trunk
Accelerations during Human Walking.” Gait and
Posture 18(2): 1–10.
Gait Phases Detection in Elderly using Trunk-MIMU System
65
