
Influences of Instructions about Operations on the Evaluation of the
Driver Take-Over Task in Cockpits of Highly-Automated Vehicles
Patrick Schn
¨
oll
Institute for Media Technology, University of Technology Ilmenau, Germany
Keywords:
Automated Driving, Automation, Driver Take-Over Task, Driving Simulator, Human-Machine Interaction,
Human-Technology Interaction, Interface Design, Instructions, Operations, Take-Over Request, Test Method,
Test Design.
Abstract:
This paper works towards the development of a technologically independent framework to help render human-
centered examinations of the driver take-over task present in highly-automated vehicles comparable. Based on
available literature, the state-of-the-art and best-practices for driver take-over task examinations are analyzed
and discussed. It turned out, that the scope of the studies’ documentation, their level of detail as well as their
wording differs significantly among themselves with respect to the instructions which were given to the test
persons. Besides the stimulus materials made available to the test persons during the examinations, bound-
ary conditions for the solution space of the task execution are defined by the instructions about operations
provided. Therefore, the focus of this paper lies on the structural analysis of such instructions, suitable for a
human-centered examination of the driver take-over task. By defining new demands for their documentation
and enhancing comparability between future studies, this paper aims on holistically improving the robustness
and validity of findings about human-performance in the field of automated vehicles.
1 INTRODUCTION
As long as automated driving systems, which are ca-
pable of redundantly handling an unlimited opera-
tional design domain (SAE International, 2018), are
not available in series, partial automation with re-
gard to the driving task will determine the market of
advanced driver assistance systems. Per definition,
these systems incorporate at least one transition be-
tween the driver and the automated system and vice-
versa per drive. Therefore, understanding the human-
technology interaction in automated vehicles is a ma-
jor focus of research in the automotive industry.
The driver take-over task represents the procedure
during which the responsibility of controlling the ve-
hicle is transferred between the automated system and
the driver. Various studies exist, which determine
the driver take-over task or the driver’s response to
a driver take-over request (TOR) issued by the auto-
mated system, respectively.
To evaluate human-technology interaction in
cockpits of highly-automated vehicles, driving sim-
ulators are a widely used tool, both in research and
the automotive industry.
In order to obtain more generic, reliable and ro-
bust statements about the human-technology interac-
tion after a take-over request, results obtained from
various driving simulator studies can be compared.
Although the available studies share the same over-
all subject, they differ with respect to their test setups,
methods and designs, leaving the question to what ex-
tent the results of these studies can be rendered com-
parable.
Therefore, the present paper aims at working to-
wards a comprehensive and comparable framework
to support the execution of driver simulator studies
in the field of partially automated driving systems by
providing an overview about test methods and designs
for the evaluation of human-technology interaction in
cockpits of highly-automated vehicles.
2 RELATED WORK
This paper builds upon the description of a generic
test setup suitable for the examination of the driver
take-over task following on from (Hackman, 1969;
Bubb et al., 2015; Winner et al., 2015; Schn
¨
oll, 2020).
Its analytical foundation and development have been
described in detail in (Schn
¨
oll, 2020). In the follow-
ing, the building blocks of the framework are pre-
72
Schnöll, P.
Influences of Instructions about Operations on the Evaluation of the Driver Take-Over Task in Cockpits of Highly-Automated Vehicles.
DOI: 10.5220/0010260600720080
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 2: HUCAPP, pages
72-80
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Focus on
Primary /
Secondary
Task(s)
Manual
Driving
Mode
Focus on
Tertiary
Task(s)
Automated
Driving
Mode
Stimulus Materials
Instructions
About
Goals
Instructions
About
Operations
TECHNICAL IMPLEMENTATION
PROCESS
DRIVER TAKE-OVER TASK
Final
Outcome
TEST PERSON
TEST ENVIRONMENT
TEST METHOD / -DESIGN
Figure 1: Illustration of a generic test setup suitable for the
examination of the driver take-over task following on from
(Hackman, 1969; Bubb et al., 2015; Winner et al., 2015;
Schn
¨
oll, 2020).
sented.
Figure 1 shows a generic test setup suitable for
the examination of the driver take-over task (Schn
¨
oll,
2020), following on from (Hackman, 1969; Bubb
et al., 2015; Winner et al., 2015). A subset of terms
used in Figure 1 originate from and are compatible
with the ’framework for analyzing the effect of tasks’
introduced by (Hackman, 1969). The aspect of de-
composing the driving task into primary, secondary
and tertiary tasks, known as the ’hierarchy of the driv-
ing task’, is based on (Winner et al., 2015; Bubb et al.,
2015).
2.1 Test Setup
As illustrated in Figure 1, a generic test setup consists
of a test environment, a test method and design as well
as a final outcome.
Test Environment. The test environment itself is
defined by a technical implementation, which pro-
vides stimulus materials to the test person executing
a process. Some stimulus materials provided to the
test person are subject to an active interaction, e.g. a
brake request, while others are at most influenced im-
plicitly, like e.g. information regarding surrounding
traffic participants or other road users.
Table 1: Categories for test environments being used to ex-
amine driver behavior in a partially automated driving sys-
tem (Schn
¨
oll, 2020).
Test Environments
Exemplary arranged in descending
order based on available stimulus materials
Categories
1
Vehicle on public roads / test track
2
Dynamic driving simulator with screen
projection (VR CAVE)
3
Dynamic driving simulator with VR headset
4
Static vehicle with screen simulation
5
Static simulation with screen projection (VR
CAVE)
6
Static simulation with multiple displays
7 Static simulation with VR headset
8
Static screen simulation with a minimal input
device set
In the present case, the process corresponds to the
test person performing the driver take-over task, ac-
quiring control over the vehicle from the automated
system, which results in a transition from the auto-
mated to the manual driving mode. Since in full au-
tomation mode, the complete responsibility is consid-
ered to be on system side, test persons can focus on
tertiary tasks, like i.e. the interaction with the vehi-
cle’s entertainment system, which are not connected
to the actual driving task itself.
Process. The process is influenced by personal fac-
tors (Hackman, 1969), which can be categorized into
stable and variable characteristics (Bundesanstalt f
¨
ur
Straßenwesen, 2012). Variable characteristics are
subject to frequent change, e.g. emotions, whereas
stable characteristics remain unchanged over a longer
period of time, as e.g. the driver’s age (Bundesanstalt
f
¨
ur Straßenwesen, 2012).
Categorization of Test Environments. Table 1
lists categories for test environments being used to ex-
amine driver behavior in a partially automated driving
system. The categories are exemplary arranged in de-
scending order based on available stimulus material.
In case of a vehicle on public roads or a test track
1 , the whole stimulus material is entirely available
to the test person, whereas with a static screen simu-
lation with a minimal input device set 8 , it is tailored
to a minimum.
Influences of Instructions about Operations on the Evaluation of the Driver Take-Over Task in Cockpits of Highly-Automated Vehicles
73

By conducting studies in test environments such
as 2 - 8 , stimulus materials are implicitly and ex-
plicitly tailored by the selection of the test environ-
ment and the provision of certain stimulus materials
during the examination, as defined by the designer of
the study. All stimulus materials, which are tailored
during the design phase of the study, have a more or
less significant influence on the test person’s process
execution.
Therefore, test environments have to be chosen
purposefully in order to avoid unwanted side- and
cross-effects as well as influences on the overall re-
sult of the study attributed to the test setup. Due to
economic and resource-related boundary conditions,
only a minority of studies can be performed in ve-
hicles (cf. 1 ). When making use of test environ-
ments subject to tailoring of stimulus materials, po-
tential consequences of the tailoring should be criti-
cally examined and discussed along with the results
of the study.
Final Outcome. After having iterated through the
process and having created one or more trial out-
comes, as described by (Hackman, 1969), the final
outcome represents the final result of the process exe-
cution of the test person.
Test Method / -Design. As illustrated in Figure 1,
besides the test environment, a test setup incorporates
the test method and -design, which is closely related
to the research question of the respective study. The
test method and -design consist of instructions about
operations as well as instructions about goals (Hack-
man, 1969), which are communicated to the test per-
son before the start of the respective test run. This
way, boundary conditions and meta-information are
given to the test person defining the solution space for
the execution of the process.
The instructions about operations contain details
on how the process shall be executed by the test per-
son, whereas the instructions about goals carry infor-
mation about what the test person’s action shall result
in to fulfill the work task under examination. Com-
paring the instructions about goals to the final out-
come represents the performance of each individual
test person.
3 RESEARCH QUESTION,
DESIGN AND METHOD
Having analytically defined the generic structure (cf.
Figure 1) and categorized the technical implementa-
tion of test setups used in literature, instructions given
to the test persons in studies available in literature
have to be investigated to be able to make a statement
about their comparability.
3.1 Research Question
Independent of the different technical implementa-
tions of test environments used in literature, another
dimension towards comparability of the respective
studies is to examine the instructions about operations
which are given to the test persons about to perform
a driver take-over task. Hence, the research question
in scope is: How can instructions about operations
given to test persons in studies examining the driver
take-over task be compared?
After analyzing and comparing the different in-
struction sets given in literature, a generic set of task
groups for the definition of instructions about oper-
ations shall be derived in order to give a foundation
for a generic framework supporting comparability of
future studies dealing with human-technology inter-
action in cockpits of highly-automated vehicles.
3.2 Research Design & Method
To answer the research question, various publications
investigating human performance in and interaction
with automated driving systems using driving simu-
lators have been reviewed and compared to obtain an
understanding about their commonalities and differ-
ences as well as best-practices in test methods and
-designs.
Representative statements have been collected and
compiled into an overview which contains examples
about instructions about operations with regard to
the driver take-over task from literature. Based on
the findings from this analytical research, technolog-
ically independent instructions about operations for
the driver take-over task have been structurally de-
rived based on the methodological approach of the Hi-
erarchical Task Analysis (HTA), as described by (Di-
aper and Stanton, 2003).
4 RESEARCH RESULTS
To obtain an overview about practices in research,
available literature has been analyzed and compared
regarding the instructions about operations which are
communicated to the test persons in the respective
studies. The analysis focused on instructions that re-
late to the overall interaction with the test environ-
ment as well as the driver take-over task itself. Out-
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
74

side the scope of this analysis were instructions with
relation to non-driving-related tasks (NDRT).
In the first part of this section, findings from the
literature analysis are presented. These are followed
by a section introducing a methodical approach for
the definition of instructions about operations which
can act as a baseline for the documentation of future
studies related but not limited to the driver take-over
task. Furthermore, the results obtained from the pre-
sented work are connected and contextualized to the
illustration of a generic test setup suitable for the ex-
amination of the driver take-over task (cf. Figure 1),
which has been introduced before.
The results from the literature analysis are struc-
tured into three sections: engagement and disengage-
ment criteria for automation, the influence of instruc-
tions given to test persons during the studies and their
potential effects on the considered between-subjects
factors as well as determinant statements which are
related to personal interpretation. The sections men-
tioned above represent comparison criteria for in-
structions about operation given to test persons in
studies examining the driver take-over task.
4.1 Engagement & Disengagement
Criteria
Table 2 gives an overview of engagement and disen-
gagement criteria for automation in driver take-over
task examinations. Whereas it is a best-practice in lit-
erature to engage and disengage automation by press-
ing a button on the steering wheel (cf. Table 2), it is
rather unusual that the simulator itself gives the com-
mand for engaging the automation as with (Mok et al.,
2015).
Gas & Brake Intervention. Typically, the disen-
gagement of the automation system because of a
driver intervention is caused through a steering or
braking action performed by the driver (cf. Table 2).
It is noticeable, that a gas pedal interaction is widely
not taken into account, although it is a driver interac-
tion which could avoid collisions in some scenarios,
i.e. when a vehicle is approaching from the rear with
a high differential velocity.
In contrast to that, disengaging automation based
on the brake pedal actuation is very common in lit-
erature and could be observed in a variety of studies
(Jamson et al., 2013; Louw et al., 2015; Petermeijer
et al., 2017; Capallera et al., 2019). However, not
all studies contained information on the exact pedal
travel threshold which has been utilized. Typical val-
ues for the pedal travel threshold found in literature
range between 10% (Gold et al., 2013; Zeeb et al.,
2016) and 20% (Petermeijer et al., 2017).
Steering Intervention. A steering intervention usu-
ally is triggered when turning the steering wheel by a
certain angle. According values found in literature
range between 2..30 (cf. Table 2).
Other measured quantities triggering a steering in-
tervention are less frequently taken into account in lit-
erature. In the studies analyzed, (Zeeb et al., 2016)
considered the absolute steering wheel angle veloc-
ity and acceleration as a criterion for a driver inter-
vention. Moreover, (Petermeijer et al., 2017) set a
threshold for disengaging automation depending on
the ego vehicle’s deviation from the center of the cur-
rent lane, thus measuring the steering intervention in-
directly while observing the steering behavior over a
certain time period.
4.2 Instructions About Operations
Between-Subjects Factors. The analysis of avail-
able studies examining the driver take-over task has
shown, that the level of detail the overall communi-
cation between the test person and the researcher is
documented with varies significantly across the stud-
ies.
Some authors explicitly mention written instruc-
tions used for briefing (Gold et al., 2016; Neuhuber
et al., 2020) whereas typically, the communication
with the test person has been described on a more
generic level. In such cases, a deeper evaluation of
the influences, the communication between the re-
searcher and the test person has on their task exe-
cution turns out to be difficult. In addition to that,
based on the information gained from the literature
only, it is hard to estimate if the communication with
the test persons has been informal during the studies
or if a potential formalization was not documented in
the publication itself.
However, if a publication lacks a detailed descrip-
tion of the way instructions have been provided to the
test persons, consequential effects on the results of the
respective study cannot be determined. This applies
in particular when utilizing between-subjects factors,
which are commonly used for validation to statisti-
cally increase the robustness of findings and achieve
a more general validity of the research result.
Personal Interpretation. If the boundary condi-
tions for executing the driver take-over task are not
specified precisely, the task execution process can be
subject to an unintended and unexpected personal in-
terpretation. However, this may also be implemented
Influences of Instructions about Operations on the Evaluation of the Driver Take-Over Task in Cockpits of Highly-Automated Vehicles
75

Table 2: Engagement and disengagement criteria for automation in driver take-over task examinations.
Engagement & Disengagement Criteria
Pressing a button on the steering wheel engages and disengages automation
(Jamson et al., 2013; Louw et al.,
2015; Mok et al., 2015; Zeeb et al.,
2016; Petermeijer et al., 2017)
Automation shall be enabled after a command from the simulator is delivered (Mok et al., 2015)
Steering Intervention, if:
Steering wheel is turned more than 2
˝
(Gold et al., 2013; Louw et al., 2015)
Steering wheel is moved by more than 3
˝
from its current position (Jamson et al., 2013)
Absolute steering wheel angle velocity is larger than 0.075
˝
{s (Zeeb et al., 2016)
Absolute steering wheel angle acceleration is larger than 5
˝
{s
2
(Zeeb et al., 2016)
Steering, so that the deviation from lane centre is greater than approx. 0.5m (Petermeijer et al., 2017)
Brake Intervention, if:
Brake pedal is pressed
(Jamson et al., 2013; Louw et al.,
2015; Petermeijer et al., 2017;
Capallera et al., 2019)
Brake pedal travel is greater than 10% (Gold et al., 2013; Zeeb et al., 2016)
Brake pedal travel is greater than 25% (Petermeijer et al., 2017)
consciously in studies, i.e. in case such aspects are
coupled to the research question in scope of the ex-
amination. Nonwithstanding this, it is notable, that
some publications dealing with the driver take-over
task leave room for the personal interpretation of the
work tasks by the test person. When describing the
interaction with the automation system, various terms
subject to personal interpretation can be found.
Exemplary, (Jamson et al., 2013; Eriksson et al.,
2017; Banks et al., 2018; Capallera et al., 2019)
report instructions to the test persons which refer
to their subjective perception of comfort. (Jamson
et al., 2013; Banks et al., 2018) mention, that the
test persons could use the automated driving system
on a voluntary basis, whereas (Jamson et al., 2013;
Eriksson et al., 2017; Capallera et al., 2019) relate
to the subjective feeling of safety or the test per-
son’s appropriate reaction to a driver take-over re-
quest or the execution of non-driving-related tasks re-
spectively.
Hierarchical Task Analysis (HTA). As mentioned
before, the instructions about operations provide
boundary conditions under which the driver take-over
task shall be performed by the test person.
In order to converge towards a generic and holistic
instruction set to achieve comparability over different
driver take-over task examinations, the influence of
instructions subject to personal interpretation must be
minimized. An initial but important step in this di-
rection is the compilation of a technologically inde-
pendent set of work tasks the driver take-over task is
composed of. Therefore, a structured analysis of the
respective tasks is required.
(Diaper and Stanton, 2003) give an overview
about established methods to model tasks and com-
pare their syntactic and semantic differences. Follow-
ing (Diaper and Stanton, 2003), the Hierarchical Task
Analysis (HTA) approach can be used to investigate
human performance ’within complex, goal-directed
control systems’ featuring human-technology inter-
action, which matches a highly-automated vehicle in
traffic. Hence, to generically define instructions about
operations suitable for the driver take-over task and
the underlying human-technology interaction, a Hi-
erarchical Task Analysis (HTA) has been performed.
The findings of this analysis are discussed in the fol-
lowing.
Driver Take-Over Task. Table 3 illustrates the re-
sults of the Hierarchical Task Analysis (HTA) as the
generic specification for the instructions about opera-
tions suitable for the driver take-over task. The nota-
tion used is based on the one defined for the Hierar-
chical Task Analysis (HTA) by (Diaper and Stanton,
2003). This particularly applies to the execution con-
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
76
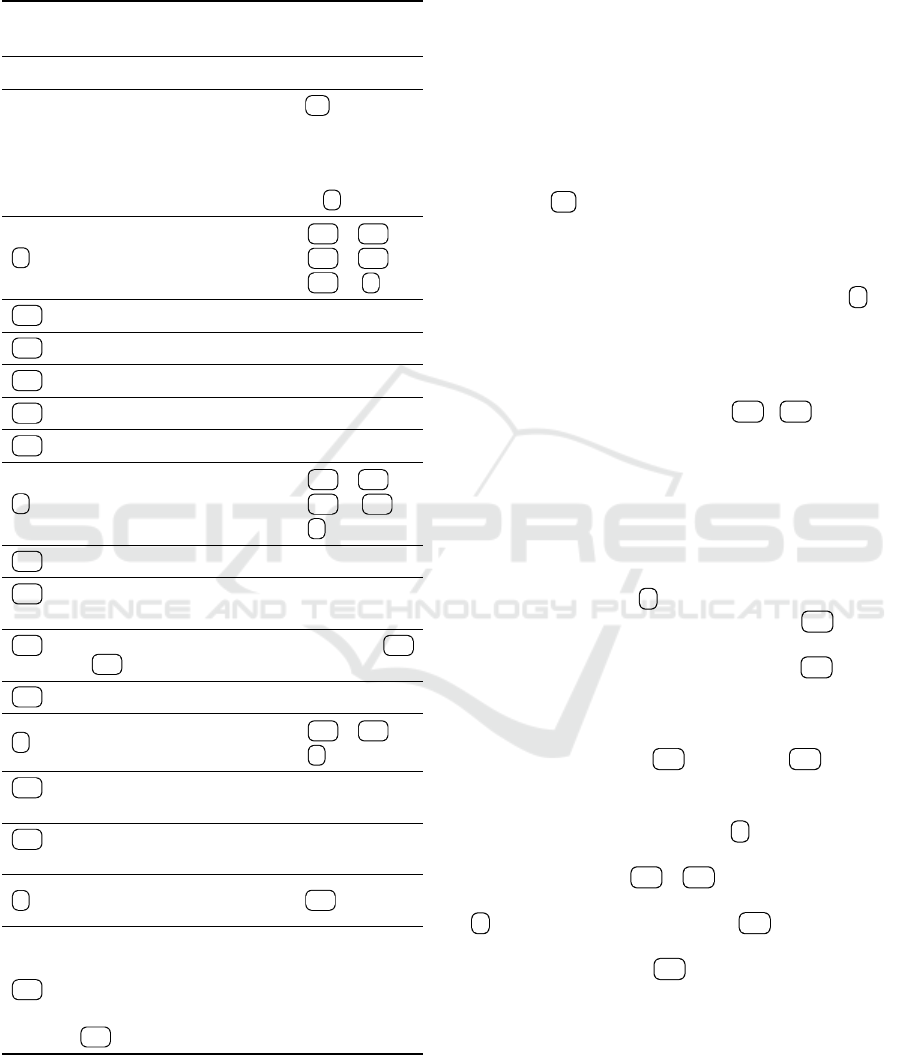
Table 3: Specification for human-centered instructions
about operations for the driver take-over task based on a
Hierarchical Task Analysis (HTA) as described by (Diaper
and Stanton, 2003).
Driver Take-Over Task
Instructions About Operations
Description Condition(s)
œ
Supervise the vehicle status
by monitoring the
human-machine interface
components in the cockpit
IF a take-over
request (TOR),
initiated by the
system, has
been detected:
ą 1
1
Examine and understand the
situation:
1.1
+
1.2
+
1.3
+
1.4
+
1.5
ą
2
1.1
Current position with respect to the next waypoint
1.2
Static environment
1.3
Dynamic environment
1.4
Road and its course
1.5
Traffic situation
2
Plan the intended driving
maneuver path:
2.1
+
2.2
ą
2.3
ą
2.4
ą
3
2.1
Define drivable space
2.2
Predict dynamics, movements and behavioral reac-
tions of other traffic participants
2.3
Evaluate potential driving strategies based on
2.1
and
2.2
2.4
Define driving strategy to be performed
3
Prepare the driver take-over
maneuver:
3.1
+
3.2
ą
4
3.1
Bring hands into the position required for manually
controlling the vehicle
3.2
Bring feet into the position required for manually
controlling the vehicle
4
Perform the driver take-over
maneuver:
4.1
4.1
Interact with the vehicle by
applying appropriate control
signals (e.g. gas / brake /
steering) in order to execute
the driving strategy defined
in
2.4
ditions listed in the second column of Table 3.
A plus-sign indicates, that the respective tasks as-
sociated with it have to be completed before the next
consecutive task group, which is represented by a
one-digit number, can be performed. A special char-
acteristic of this notification is that the conjoined tasks
can be completed in an arbitrary order, which reflects
the highly-subjective way in which different test per-
sons may fulfill a given work task. Once a task group
is completed, the subsequent one follows until the
whole driver take-over task is completed.
The first row of Table 3 is an exception to the
above since it describes the ongoing, permanent ac-
tion of the test person supervising the vehicle status
by monitoring the human-machine interface compo-
nents in the cockpit. The actual driver take-over task
is started IF a driver take-over request (TOR), initi-
ated by the automation system, has been detected by
the driver.
In this case, the driver initially has to examine and
understand the traffic situation the vehicle is in 1 . In
order to gain awareness and an understanding about
the surrounding situation, the current position with
respect to the next waypoint, the static and dynamic
environment as well as the road and the traffic situa-
tion have to be understood (cf.
1.1
-
1.5
). Among
others, the sequence these subordinate tasks are per-
formed in, can depend on stable or variable personal
characteristics, like the individual feeling of safety or
comfort (cf. (Bundesanstalt f
¨
ur Straßenwesen, 2012;
Schn
¨
oll, 2020)).
After having examined and understood the sur-
rounding situation, the intended driving maneuver
path can be planned 2 . To do so, the drivable space
around the ego vehicle has to be defined
2.1
and dy-
namics, movements and behavioral reactions of other
traffic participants have to be predicted
2.2
. After
having gained information about the static and dy-
namic environment as well as the dynamics of the sur-
rounding traffic participants, potential driving strate-
gies can be evaluated
2.3
and defined
2.4
based on
this.
With a driving strategy defined, the driver take-
over maneuver can be prepared
3
by bringing hands
and feet into the position required for manually con-
trolling the vehicle
3.1
+
3.2
. Having prepared for
the driver take-over, the maneuver can be performed
4 by interacting with the vehicle
4.1
by applying ap-
propriate control signals in order to execute the driv-
ing strategy defined in
2.4
.
Figure 2 illustrates the results obtained from per-
forming the Hierarchical Task Analysis (HTA) for the
driver take-over task (cf. Table 3) as an extension of
the generic test setup presented in Figure 1. As illus-
trated in Figure 2, the instructions about operations
for the driver take-over task can be generically de-
scribed by the 6 consecutive task groups supervise,
examine, plan, prepare, perform and interact.
Influences of Instructions about Operations on the Evaluation of the Driver Take-Over Task in Cockpits of Highly-Automated Vehicles
77

Instructions
About
Operations
Instructions
About
Goals
DRIVER TAKE-OVER TASK
œ
Supervise
the vehicle
status
1
Examine
and understand
the situation
2
Plan
the intended
maneuver path
3
Prepare
the driver take-
over maneuver
4
Perform
the driver take-
over maneuver
4.1
Interact
with the
vehicle
SUBJECT TO PERSONAL INTERPRETATION
CONSECUTIVE STEPS
TEST METHOD / -DESIGN
Figure 2: Instructions about operations suitable for the examination of the driver take-over task (cf. Figure 1; Table 3)
following on from (Hackman, 1969; Bubb et al., 2015; Winner et al., 2015; Schn
¨
oll, 2020).
As shown in Table 3, some lower-level tasks in-
side the respective task groups are non-sequenced, as
indicated by the plus-sign associated to them. The or-
der of the task completion is determined by the test
person’s personal factors, whereas the whole process
of performing the driver take-over task itself is subject
to the test person’s personal interpretation.
5 CRITICAL ANALYSIS
The presented approach aims to be suitable for the
description of various driving tasks. However, in gen-
eral, these are influenced by varying stimulus materi-
als, surrounding conditions and personal factors, lead-
ing to many permutations. Therefore, the presented
tables, figures, lists and examples do not claim to be
exhaustive.
The performed literature analysis should be re-
garded as an indication for state-of-the-art and best-
practices used in this research field and makes no
claim to completeness. It is intended to help draw
conclusions as to which aspects of the documen-
tation of the research results should be given spe-
cial attention. The compilation of the instructions
about operations has been achieved through analyt-
ical research based on a Hierarchical Task Analysis
(HTA). Depending on the research question in scope
of the respective examination, other groupings or lev-
els of detail are possible when following the presented
method. Moreover, the human-machine interface de-
sign as well as the technical implementation of the
test environment’s cockpit are expected to influence
the overall cooperation between the test person and
the automation system, which should be considered
when planning test runs.
6 CONCLUSIONS
6.1 Summary
This paper works towards the development of a tech-
nologically independent framework to help render
human-centered examinations of the driver take-over
task present in highly-automated vehicles compara-
ble. It introduces and discusses a framework which
pursues the idea of generically describing instructions
about operations suitable for the driver take-over task.
This can be achieved by formalizing human-centered
instructions about operations necessary for the driver
take-over task on one hand, as well as their communi-
cation to the test persons on the other. The presented
framework supports a common baseline for upcom-
ing human-centered studies conducted in the field
of highly-automated vehicles and follows on from a
novel description of a test setup for the driver take-
over task.
Based on available literature, the state-of-the-art
and best-practices for examinations dealing with the
driver take-over task have been analyzed and dis-
cussed. It turned out, that the scope of the analyzed
studies’ documentation, their level of detail as well as
their wording differs significantly among themselves
with respect to the instructions which were given to
the test persons.
The analysis utilizing the presented framework
has shown, that the instructions about operations
for the driver take-over task consist of subsequent,
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
78

generic tasks groups, which can be further assessed
based on the research question in scope. The appli-
cability for the driver take-over task has been exem-
plary demonstrated by having subdivided the generic
task groups further. The presented method can be tai-
lored or extended to meet the specific requirements of
the respective research questions, thus making it suit-
able for a technologically independent usage in vari-
ous test setups.
6.2 Discussion
When following the presented methodology, re-
searchers should consciously and attentively docu-
ment instructions about operations provided to the test
persons to avoid unintended, implicit side effects on
the study itself. This is especially relevant for test
environments making use of abstracted vehicles, like
driving simulators of various types, since their tech-
nical implementation goes by with an explicit or im-
plicit tailoring of stimulus material provided to the
test person.
To maintain comparability regarding the between-
subjects factors within the own study as well as render
the study comparable with others, researchers should
minimize the potential for subjective interpretation of
their given instructions by the test persons. Therefore,
a structural analysis of the task under examination is
required, which can be performed by following the
framework presented in this paper.
In general, to achieve comparability within the
own study, the test execution should be formalized by
using a reproducible way of providing the instructions
about operations to each test person. In order to en-
able comparability with other studies, as well as gen-
erate transparency over potential unintended side ef-
fects, it is recommended to devote special attention to
the detailed documentation of the instructions about
operations.
In addition to that, the validity and robustness of
the obtained results can be increased by formalizing
the interaction with the test persons, e.g. by utilizing
written instructions and reduce communication to an
absolute necessity. The difficulty with this is to find
a balance between the formalization of the commu-
nication without making the test persons feeling un-
comfortable or treated impolitely, which can have an
impact on the results of the examination, respectively.
It is recommended to investigate if a gas pedal in-
teraction causing the ego vehicle to accelerate could
be a valid way to solve the driver take-over task in
the respective scenario. Providing access to this ad-
ditional stimulus material can lead to a better under-
standing of driver take-over maneuvers in different
scenarios. Furthermore, inconvenience with the au-
tomation system, i.e. by subjectively driving too slow,
can be qualitatively measured and assessed as a bene-
ficial side effect.
6.3 Outlook
In a subsequent analysis, the test method and -design
of studies investigating the driver take-over task has to
be examined further to gain a holistic understanding
of the research results obtained in this field. There-
fore, the introduced methodology should be imple-
mented in existing and upcoming studies to verify its
suitability. Aspects worthwhile to investigate could
be meta-goals and objectives the test persons shall
achieve as well as the correlation between typical
research questions and technical implementations of
test setups the respective studies are conducted in.
Additionally, the applicability of the technologically
independent approach presented could be verified by
conducting a study based on the methodologies intro-
duced in this work.
Furthermore, deviating performances of test per-
sons within the presented task groups could be
mapped to established models of human error func-
tions. Understanding the origin of the individual be-
havior of each test person contributes to the success-
ful design of future human-machine interfaces for the
driver take-over task.
REFERENCES
Banks, V. A., Eriksson, A., O’Donoghue, J., and Stanton,
N. A. (2018). Is partially automated driving a bad
idea? Observations from an on-road study. Applied
Ergonomics, 68:138–145.
Bubb, H., Bengler, K., Gr
¨
unen, R. E., and Vollrath, M.
(2015). Automobilergonomie. Springer Fachmedien
Wiesbaden, Wiesbaden.
Bundesanstalt f
¨
ur Straßenwesen (2012). Einflussfaktoren
auf das Fahrverhalten und das Unfallrisiko junger
Fahrerinnen und Fahrer. Berichte der Bundesanstalt
f
¨
ur Straßenwesen, Heft M 229(Mensch und Sicher-
heit).
Capallera, M., de Salis, E., Meteier, Q., Angelini, L., Car-
rino, S., Khaled, O. A., and Mugellini, E. (2019). Sec-
ondary task and situation awareness, a mobile applica-
tion for conditionally automated vehicles. In Proceed-
ings of the 11th International Conference on Auto-
motive User Interfaces and Interactive Vehicular Ap-
plications: Adjunct Proceedings, pages 86–92, New
York, NY, USA. ACM.
Diaper, D. and Stanton, N. (2003). The Handbook of Task
Analysis for Human-Computer Interaction. Lawrence
Erlbaum Associates, Mahwah, New Jersey, 1 edition.
Influences of Instructions about Operations on the Evaluation of the Driver Take-Over Task in Cockpits of Highly-Automated Vehicles
79

Eriksson, A., Banks, V. A., and Stanton, N. A. (2017). Tran-
sition to manual: Comparing simulator with on-road
control transitions. Accident Analysis & Prevention,
102:227–234.
Gold, C., Damb
¨
ock, D., Lorenz, L., and Bengler, K. (2013).
“Take over!” How long does it take to get the driver
back into the loop? Proceedings of the Human Fac-
tors and Ergonomics Society 57th Annual Meeting,
57(1):1938–1942.
Gold, C., K
¨
orber, M., Lechner, D., and Bengler, K. (2016).
Taking Over Control From Highly Automated Vehi-
cles in Complex Traffic Situations. Human Factors:
The Journal of the Human Factors and Ergonomics
Society, 58(4):642–652.
Hackman, J. R. (1969). Toward understanding the role
of tasks in behavioral research. Acta Psychologica,
31:97–128.
Jamson, A. H., Merat, N., Carsten, O. M., and Lai, F. C.
(2013). Behavioural changes in drivers experienc-
ing highly-automated vehicle control in varying traffic
conditions. Transportation Research Part C: Emerg-
ing Technologies, 30(May):116–125.
Louw, T., Kountouriotis, G., Carsten, O., and Merat, N.
(2015). Driver Inattention During Vehicle Automa-
tion: How Does Driver Engagement Affect Resump-
tion Of Control? 4th International Driver Distraction
and Inattention Conference, (November):1–13.
Mok, B., Johns, M., Lee, K. J., Miller, D., Sirkin, D., Ive,
P., and Ju, W. (2015). Emergency, Automation Off:
Unstructured Transition Timing for Distracted Drivers
of Automated Vehicles. In 2015 IEEE 18th Interna-
tional Conference on Intelligent Transportation Sys-
tems, pages 2458–2464. IEEE.
Neuhuber, N., Lechner, G., Kalayci, T. E., Stocker, A., and
Kubicek, B. (2020). Age-related differences in the in-
teraction with advanced driver assistance systems - a
field study. In Kr
¨
omker, H., editor, HCI in Mobility,
Transport, and Automotive Systems. Automated Driv-
ing and In-Vehicle Experience Design, pages 363–
378, Cham. Springer International Publishing.
Petermeijer, S., Bazilinskyy, P., Bengler, K., and de Winter,
J. (2017). Take-over again: Investigating multimodal
and directional TORs to get the driver back into the
loop. Applied Ergonomics, 62(July 2017):204–215.
SAE International (2018). Ground Vehicle Standard (SAE
J3016:JUN2018): Surface Vehicle Recommended
Practice J3016: (R) Taxonomy and Definitions for
Terms Related to Driving Automation Systems for
On-Road Motor Vehicles. SAE International.
Schn
¨
oll, P. (2020). Development of a Test Environment for
the Evaluation of Human-Technology Interaction in
Cockpits of Highly-Automated Vehicles. In Proceed-
ings of the 4th International Conference on Computer-
Human Interaction Research and Applications, pages
64–73. INSTICC, SCITEPRESS - Science and Tech-
nology Publications.
Winner, H., Hakuli, S., Lotz, F., and Singer, C., editors
(2015). Handbuch Fahrerassistenzsysteme. Springer
Fachmedien Wiesbaden, Wiesbaden.
Zeeb, K., Buchner, A., and Schrauf, M. (2016). Is take-over
time all that matters? The impact of visual-cognitive
load on driver take-over quality after conditionally
automated driving. Accident Analysis & Prevention,
92(January 2017):230–239.
HUCAPP 2021 - 5th International Conference on Human Computer Interaction Theory and Applications
80
