
Modeling a priori Unknown Environments:
Place Recognition with Optical Flow Fingerprints
Zachary Mueller and Sotirios Diamantas
Department of Engineering and Computer Science, Tarleton State University,
Texas A&M University System, Box T-0390, Stephenville, TX 76402, U.S.A.
Keywords:
Place Recognition, Optical Flow, Optical Flow Fingerprints, Loop Closing.
Abstract:
In this research we present a novel method for place recognition that relies on optical flow fingerprints of
features. We make no assumptions about the properties of features or the environment such as color, shape,
and size, as we approach the problem parsimoniously with a single camera mounted on a robot. In the training
phase of our algorithm an accurate camera model is utilized to model and simulate the optical flow vector
magnitudes with respect to velocity and distance to features. A lognormal distribution function, that is the
result of this observation, is used as an input during the testing phase that is taking place with real sensors and
features extracted using Lucas-Kanade optical flow algorithm. With this approach we have managed to bridge
the gap between simulation and real-world environments by transferring the output of simulated training data
sets to real testing environments. In addition, our method is highly adaptable to different types of sensors
and environments. Our algorithm is evaluated both in indoor and outdoor environments where a robot revisits
places from different poses and velocities demonstrating that modeling an unknown environment using optical
flow properties is feasible yet efficient.
1 INTRODUCTION
This research shows how to develop a model that es-
timates the probability of having revisited the same
place or site based on optical flow patterns. In order
to accomplish this we do this in two phases, training
and testing. The training phase is solely carried out on
a simulator, drastically reducing both time and work
in the estimation process. In addition, our method is
adaptable to different types of environments as well
as camera sensors. This research shows that it is pos-
sible to train a model in a simulator and to then use the
simulated output as input during the testing phase for
real-world environments. The simulated results rely
on accurate camera calibration and motion and dis-
tance parameters between camera and features. The
training phase which is based on simulation acts com-
plementary to the training phase which is taking place
with real-world camera and robotic systems. A simi-
lar training data set has also been used in (Diamantas
et al., 2010) where results obtained using a simulation
engine only.
In the training sessions we consider only two pa-
rameters, the velocity of the robot and the distance
between the robot and the target landmark. By gener-
ating optical flow patterns each time the robot is enter-
ing and leaving an area, we is able to compare and rec-
ognize areas that we have been in before, even when
entering the area from different angles or velocities.
Then, based on the training done via simulator, a sim-
ilarity score is produced. This method of re-visiting
a site is similar to the method that insects utilize in
nature when entering or exiting an area.
Place recognition has always been a fundamental
problem in robotics and computer vision. A robot
that is capable of recognizing a previously unknown
environment is in great need, as this capability is in-
terwoven with localization and mapping problems in
robotics science. Place recognition using visual infor-
mation has attracted much attention the last few years
especially since the advent of algorithms that are ro-
bust to scaling and camera orientation (Lowe, 1999),
(Bay et al., 2008b). While optical flow has become
a popular topic in the last decades, there has been no
research done previously for place recognition using
optical flow fingerprints. Most place recognition re-
search is done using properties of the environment,
while optical flow uses the property of the camera mo-
tion, and is a function of the velocity of the camera
and the distance between the camera and the object.
Mueller, Z. and Diamantas, S.
Modeling a priori Unknown Environments: Place Recognition with Optical Flow Fingerprints.
DOI: 10.5220/0010271007930800
In Proceedings of the 16th Inter national Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
793-800
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
793

Optical flow is the rate of change of image motion,
which is obtained from the motion of the autonomous
agent. In both the simulator and on the robot, the cam-
era is placed perpendicular to the direction of motion,
so a translational optic flow is generated. Since the
optic flow only uses two parameters, all other infor-
mation is not considered. This allows for the environ-
ment that the robot is in to be unknown and unstruc-
tured.
Previous works used a simulation to model the de-
viation of an optical flow vector, using distance and
velocity (Diamantas et al., 2010; Diamantas et al.,
2011). Building upon that, our current model trains
using vector magnitudes that vary with respect to dis-
tance and velocity. When testing in the real-world en-
vironment we are using a Dr Robot 4x4 mobile robot
equipped with a Blackfly S USB3 camera.
Optical flow is a method that is inspired by biol-
ogy, specifically by the way honeybees use optical
flow for navigation and obstacle avoidance. Biolog-
ical inspiration provides solutions to common prob-
lems that robots encounter. By utilizing optical flow
we gain multiple advantages. First, we gain algo-
rithmic simplicity and performance, which in turn
saves on power consumption. Second, we gain in-
sight into the biological organisms that will, in turn,
help us perceive and understand the underlying mech-
anisms that facilitate biological organisms (Diaman-
tas, 2010). The final advantage to using optical flow is
that we do not store the images used, only the optical
flow patterns. This removes image retrieval times, and
processing between images is not required. This fur-
ther contributes to the time efficiency of this method.
This paper comprises four sections. Following is
Section 2 where work on optical flow is presented. In
Section 3 the methodology of the probabilistic model
that is divided into the training phase and the testing
phase is presented. Results are also presented in this
section from experiments carried out both in indoor
and outdoor environments with the robot re-visiting
places at varying velocities and distances. Finally,
Section 4 epitomizes the conclusions drawn from this
research and indicates a number of areas that further
research is attainable.
2 RELATED WORKS
Optical flow has been a topic for research for several
decades. One of the first works that studied the rela-
tion of scene geometry and the motion of the observer
was by (Gibson, 1974). A large amount of work, how-
ever, has been focused on obstacle avoidance using
optical flow (Camus et al., 1996; Warren and Fajen,
2004; Merrell et al., 2004). The technique, gener-
ally, works by splitting the image (for single cam-
era systems) into left and right sides. If the summa-
tion of vectors of either side exceeds a given thresh-
old then the vehicle is about to collide with an ob-
ject. Similarly, this method has been used for center-
ing autonomous robots in corridors or even a canyon
(Hrabar et al., 2005) with the difference that the sum-
mation of vectors must be equal in both the left-hand
side and the right-hand side of the image. (Ohnishi
and Imiya, 2007) utilize optical flow for both obsta-
cle avoidance and corridor navigation. (Madjidi and
Negahdaripour, 2006) have tested the performance of
optical flow in underwater color images.
In a work implemented by (Kendoul et al., 2009)
optic flow is used for fully autonomous flight control
of an aerial vehicle. The distance travelled by UAV is
calculated by integrating the optic flow over time. A
similar work for controlling a small UAV in confined
and cluttered environments has been implemented by
(Zufferey et al., 2008). (Barron et al., 1994) discuss
the performance of optical flow techniques and their
comparison and focused on accuracy, reliability and
density of the velocity measurements.
Visual recognition and comparisons through
imaging can be broken down into roughly three cate-
gories, while many algorithms utilize these categories
in tandem.
2.1 SURF/SIFT Tracking
Relying on local features, SURF (Speeded-Up Robust
Features)(Bay et al., 2008a) allows for finding point
similarities between two separate images. After iden-
tifying ‘interest points’ that are repeatedly findable,
the detector can then be used in multiple images and
matched between them. The matching is done based
on distance vectors. The matching time of distance
vectors has to find a balance between the dimensions
of the descriptor. A descriptor with few dimensions
is better for fast identification and matching, but a de-
scriptor with fewer dimensions is also less distinctive
and can result in false positives. SIFT tracking (Scale
Invariant Feature Transform) (Lowe, 1999) uses sim-
ilar local feature vectors, and is invariant to lighting
changes and image translation, scaling, and rotation.
By using staged filtering, the SIFT tracking identifies
its interest points by finding local maxima and min-
ima, and each point is used to generate a feature vec-
tor, which is easily searchable and comparable. In
(Bardas et al., 2017) a monocular camera is employed
to track and classify objects.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
794

2.2 Scene Text Tracking
Scene text tracking (Liao et al., 2018) relies primar-
ily on written word throughout images, in order to
determine geolocation. The process of identifying
text (Wang et al., 2015) is challenging because of the
vast variations in how the text is presented. Com-
bine that with varied lighting, orientations, and an-
gles, the process of identifying text is a difficult one,
but not one that can’t be overcome. Once text is iden-
tified, it can then be used to compare between multi-
ple images. While this technology is available pub-
licly (Liao et al., 2017), it has shortcomings when
used in environments that do not have text widely dis-
played.
2.3 Deep Learning
While some algorithms do not require similar light-
ing situations, others still require similar scenarios for
the images to be compared accurately. Night-to-Day
Image translation (J
´
egou et al., 2010) allows for im-
ages taken at night to be cast into possible images
from a daytime perspective. This can then be used
to compare images in a database of geo-tagged im-
ages to find the prospective location of the image.
The process of Night-to-Day translation uses a neu-
ral model that takes relatively little training and does
not require ground-truth pairings. Alongside image
translation, there is the prospect of comparing images
against all other images in a database. BOF (Bag-Of-
Features)(Draper, 2011) search is a new approach to
optimize searching, with results that optimize the im-
age representation and allow for quick results on large
datasets. Similarly, using a FAB-MAP (Cummins and
Newman, 2008) tackles the problem of recognizing
places based off of appearance, despite subtle differ-
ences between images. To accomplish this there are
learned generative models, and new models can be
learned online using a single observation. The benefit
to FAB-MAP is the linear complexity in the number
of places in the map.
3 METHODOLOGY
This section describes the methodology followed for
tackling the place recognition problem using optical
flow fingerprints. Our approach is divided into train-
ing and testing phases. Initially, we calibrate our cam-
era, a FLIR Blackfly S, to estimate the intrinsics pa-
rameters of the camera (Fig. 1). The intrinsics pa-
rameters are utilized to build an accurate model of the
camera and simulate 3D points at varying distances
Figure 1: Dr. Robot Jaguar mobile robot platform with
FLIR Blackfly S camera onboard.
from the camera taken with inconstant mobile robot
velocities. These 3D points, using the camera model,
are projected onto the 2D plane. During the training
phase we observe the variability of the optical flow
vector magnitudes and how these change with respect
to distance and velocity. The training phase which is
simulation-based is carried out offline. In addition,
using an accurate model of the camera we can sim-
ulate a very large number of 3D points that would
otherwise be impossible to observe using real-world
points and data. This entails a very descriptive proba-
bility distribution function that describes the relation-
ship between distance and velocity.
In our approach we employ the Lucas-Kanade op-
tical flow algorithm (Lucas and Kanade, 1981) which
is a sparse optical flow technique entailing in a faster
computation of motion vectors. In this research we
have used a single camera to implement optical flow
and recognize places from the optical flow patterns.
The camera is mounted on a mobile robot platform
(Fig. 1) along with a laptop computer with quad-core
Intel Core i7-8650U processor and 16GB of RAM.
No other sensors are utilized in this research. In addi-
tion, apart from the intrinsics of the camera no other
parameters are known. Camera velocity and distance
to 3D points are modeled during the training phase,
however, these two parameters are unknown during
testing phase.
3.1 Training Phase
During the training phase we observe the magnitude
variability of optical flow vectors with respect to ve-
locity and distance. The mean and standard deviations
for velocity and distance are summarized in Table 1.
Both velocity and distance are drawn from Gaussian
probability distribution functions. The parameters
for velocity and distance used reflect the correspond-
ing parameters for velocity and depth in indoor and
outdoor environments where the mobile robot navi-
Modeling a priori Unknown Environments: Place Recognition with Optical Flow Fingerprints
795
gates with a relatively low velocity and the distance
to features is small in an indoor environment while
the velocity and distance are higher when navigating
through an outdoor environment .
Table 1: Modeling Parameters for Indoor and Outdoor En-
vironments.
Indoor Outdoor
Distance
(m)
µ = 1.5 µ = 20.0
σ = 0.4 σ = 5.0
Velocity
(km/m)
µ = 1.3 µ = 3.45
σ = 0.3 σ = 1.0
Figure 2 provides a pictorial representation of the
Gaussian distributions used for modeling camera ve-
locities and distances between camera and 3D points
(Fig. 3). We have observed 1 million, n = 10
6
, 3D
features with varying depths and velocities at which
they are observed. The overall simulation and pro-
jection of 3D points onto the 2D image plane of the
modeled camera required about 14.5 minutes (on a
quad-core Intel Core i7-8650U processor with 16GB
of RAM). For modeling the FLIR Blackfly S camera
we employed the (Corke, 2011) toolbox. Equation
1 shows the mathematical formulation for comput-
ing the mean magnitude, ||~u||, of all vectors given the
n = 10
6
3D points
~v =
1
n
·
n
∑
k=1
||~u
k
|| n = 1000000. (1)
The mean length, ~v, of the n optical flow vectors
is then subtracted from each one of the n optical flow
vectors as shown in (2)
X
k
= |~v −||~u
k
||| (2)
The resultant histogram derived by (2) is de-
scribed by a lognormal probability density function
(pdf) as expressed by (3)
f
X
= (δ;µ,σ) =
1
δσ
√
2π
e
−
(lnδ−µ)
2
2σ
2
δ > 0. (3)
The lognormal pdf acts as a likelihood estimator
for correlating the optical flow patterns between the
training and testing phases. For inferring the prob-
abilistic score between the two patterns the cumula-
tive density function of the lognormal function is used
and, as expressed in (4)
F
X
(δ;µ,σ) =
1
2
er f c
−
lnδ −µ
σ
√
2
= Φ
lnδ −µ
σ
.
(4)
Further to this, following our methodology any
camera can be modeled and the optical flow vectors
can be obtained by setting the parameters for veloc-
ity and distance. This approach greatly simplifies the
modeling of an a priori unknown environment. Yet,
the parameters for velocity and distance can easily be
modified to model and simulate different types of en-
vironments on which the robot will navigate, for in-
stance, high-speed traversing of an outdoor environ-
ment. The modeled camera and its intrinsic matrix K
along with its corresponding values are shown in (5)
f /ρ
w
0 u
0
0 f /ρ
h
v
0
0 0 1
=
1682.4 0 757
0 1682.4 598
0 0 1
(5)
The resolution of the specific camera was set to
1440 ×1080 and the frame rate was approximately
12.3 frames/second. The focal length in mm was
estimated to be 5.80 mm, while the pixel size was
3.45 ×10
−6
µm and the diagonal field of view (FOV)
' 58.42
◦
.
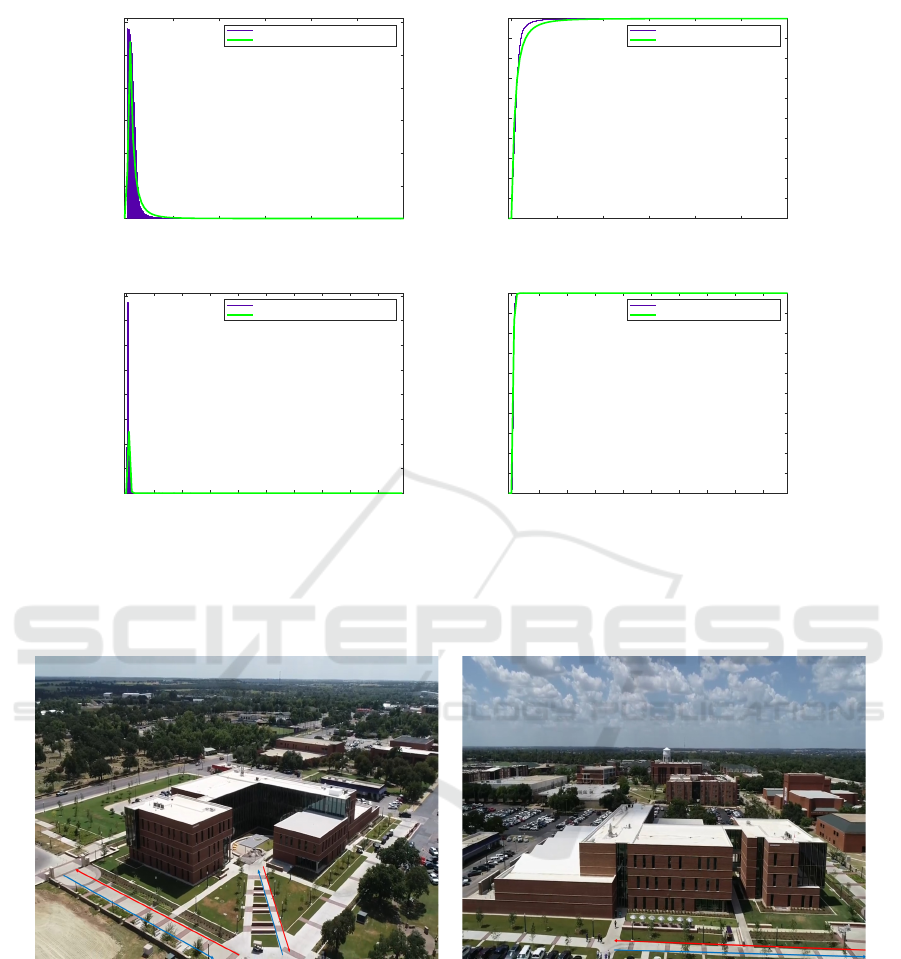
Figures 4 (a-b) depict the probability density func-
tion (PDF) and the cumulative density function (CDF)
of the lognormal function respectively, derived from
training using the parameters as shown in Table 1 for
an indoor environment. The estimated mean and stan-
dard deviation of the training PDF are µ = 1.93 and
σ = 1.17, respectively. In Figs. 4 (a) and (c) the his-
togram of the PDF depicts the variation of the length
of the optical flow vectors with respect to distance and
velocity in a sample of 10
6
training repetitions. Fig-
ures 4 (c-d) depict the lognormal PDF and CDF for an
outdoor environment. The estimated mean and stan-
dard deviation of the training PDF are µ = 1.87 and
σ = 0.42.
3.2 Testing Phase
During the testing phase the robot navigates in a a pri-
ori unknown environment. The distance and velocity
of the navigating robot have to comply with the mod-
eled parameters of the training phase. Although this
is not a strict rule, observations from the testing en-
vironment have shown that the closer the real-world
parameters are to the modeled environment the better
and more accurate the similarity score will be. Dur-
ing testing, the robot takes continuous snapshots of
the environment and generates the optical flow pat-
terns using the Lucas-Kanade optical flow algorithm.
No images are stored nor is there a need for image
retrieval and comparison, only the properties of the
optical flow vectors are stored in each pair of frames.
In particular, during testing the robot passes from
the same scene twice. At least two passes are neces-
sary for the robot to identify and recognize a scene.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
796

(a) (b)
Figure 2: (a) Gaussian probability distribution functions used for modeling camera velocities and distances to features. The
mean and standard deviation for an indoor environment for velocity are µ = 1.3 and σ = 0.3 whereas mean distance and
standard deviation for distance are µ = 1.5 and σ = 0.4; (b) for an outdoor environment the velocity parameters are µ = 3.45
and σ = 1.0 whereas for distance are µ = 20.0 and σ = 5.0.
Figure 3: 3D point, P, observed by the same camera at two
different poses.
In the first pass the robot captures images and gen-
erates the optical flow patterns while in the second
pass the robot attempts to identify and recognize
whether a scene has previously been visited by the
robot by comparing the optical flow patterns based on
the lognornal distributions generated during the train-
ing phase. The problem of place recognition is also
referred to as close looping where a robot tries to rec-
ognize a scene when the robot closes the loop (sec-
ond pass). In the first pass we compute the midpoint
of each one of the vectors and then we compute the
midpoint of all midpoints, as shown in 6
¯x
i
, ¯y
i
=
1
r
·
r
∑
a=1
x
a
,y
a
(6)
In the second pass, we again compute the mid-
point of all midpoints as described by 7
¯x
j
, ¯y
j
=
1
s
·
s
∑
b=1
x
b
,y
b
(7)
Finally, we compute the Euclidean distances (eqn.
8) between the two optical flow patterns (through their
midpoints) and we plug the result of it, δ, into our Cu-
mulative Distribution Function derived from the train-
ing data set which computes the similarity score be-
tween the first pass and the second pass.
δ =
q
( ¯x
i
− ¯x
j
)
2
+ ( ¯y
i
− ¯y
j
)
2
(8)
The final similarity score is computed using eqn.
9.
P = 1 −P
δ
(9)
3.3 Experiments
The following figures present the environments ex-
periments were carried out as well as the results ac-
complished. Figure 5 shows images of the outdoor
site used to carry out place recognition by traversing
three different routes depicted with red (first pass) and
blue (second pass) vectors. (a) Routes 1 and 2 and (b)
route 3. Figure 6 shows images taken by the robot
from indoor and outdoor environments under varying
velocities and distances. In addition, the brightness of
images is not constant across all images. In the first
column the reference images are shown while in the
rest of columns the images with the highest similar-
ity scores are depicted. In our results, there was only
one false positive which is shown in the third row of
the second column. The highest similarity scores for
two similar images is around 1% (1.76% for indoor
images) with a decreasing similarity score for images
which are less similar. For dissimilar images the sim-
ilarity score drops significantly. As it can be seen the
similarity score is evidently high when the snapshots
are from the vicinity of the reference pose in spite of
the variation in velocities between the reference im-
age and the current robot snapshots.
Modeling a priori Unknown Environments: Place Recognition with Optical Flow Fingerprints
797
0 100 200 300 400 500
Data
0
0.01
0.02
0.03
0.04
0.05
0.06
Density
Histogram of vector magnitude variability
Lognormal fit (PDF)
0 100 200 300 400 500
Data
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Cumulative probability
CDF of vector magnitude variability
Lognormal fit (CDF)
(a) (b)
0 100 200 300 400 500 600 700 800 900
Data
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Density
Histogram of vector magnitude variability
Lognormal fit (PDF)
0 100 200 300 400 500 600 700 800 900
Data
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Cumulative probability
CDF of vector magnitude variability
Lognormal fit (CDF)
(c) (d)
Figure 4: (a-b) Indoor Environment: the histogram expresses the variability of the magnitude of the optical flow vectors
with respect to distance and velocity. The fitting functions are expressed with a lognormal Probability Distribution Function
(PDF) and a lognormal Cumulative Distribution Function (CDF). Mean and standard deviation are µ = 1.93 and σ = 1.17,
respectively; (c-d) Outdoor Environment: Mean and standard deviation are µ = 1.87 and σ = 0.42, respectively.
(a) (b)
Figure 5: Outdoor testing environment: Red vectors denote first pass while blue vectors denote a second pass; (a) routes 1
and 2; (b) route 3.
4 CONCLUSIONS AND FUTURE
WORK
In this research we have implemented a method for
place recognition based on the similarity of optical
flow fingerprints. We have shown that using minimal
information about the environment as well as the sen-
sors employed it is feasible to model, train, and test
a robot to recognize places from the way an environ-
ment is perceived and not based on the characteristics
or the properties of the environment. In addition, we
have managed to exploit the advantages simulation
offers such as fast computations using large sample
data sets by providing the output of it to real-world
experiments.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
798
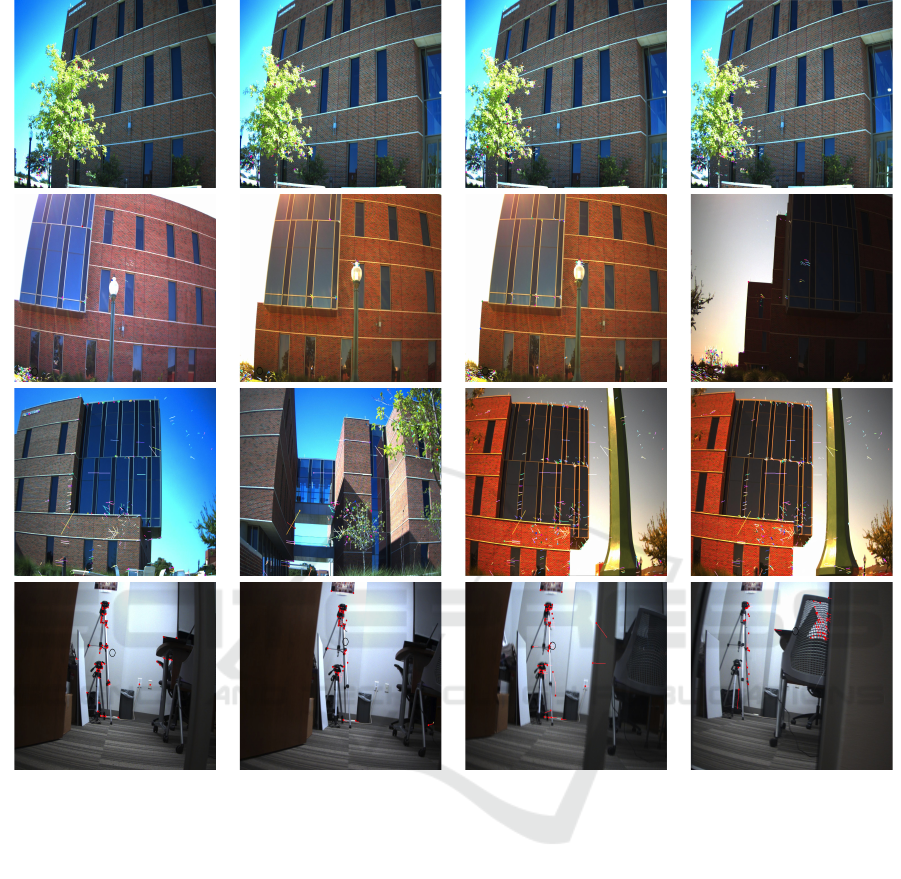
Figure 6: In the first column the reference images are depicted while in columns 2-4 the images with the highest similarity
scores are depicted (from high to low). The first three rows are from routes 1-3 while the last row is from an indoor office
environment. In the second image of the third row it was the only false positive found. Images were captured with different
velocities and distances as well as varying illumination conditions.
As a future work we wish to extend this model
in several ways. First, we plan to incorporate into our
model methods that will allow the robot to navigate in
and recognize dynamic environments. A method we
will mostly be considering for dealing with dynamic
environments appears in (Cherubini and Chaumette,
2012). Second, we want implement the Kullback-
Leibler (KL) divergence for comparing different mul-
tivariate probability distribution functions that arise
from the optical flow patterns. In that latter case,
training may not be necessary.
REFERENCES
Bardas, G., Astaras, S., Diamantas, S., and Pnevmatikakis,
A. (2017). 3D tracking and classification system using
a monocular camera. Wireless Personal Communica-
tions, 92(1):63–85.
Barron, J. L., Fleet, D. J., and Beauchemin, S. S. (1994).
Performance of optical flow techniques. International
Journal of Computer Vision, 12(1):43–77.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008a).
Speeded-up robust features. Computer Vision and Im-
age Understanding, 110(3):346–359.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V. (2008b).
Surf: Speeded up robust features. Computer Vision
and Image Understanding, 110(3):346–359.
Camus, T., Coombs, D., Herman, M., and Hong, T.-S.
Modeling a priori Unknown Environments: Place Recognition with Optical Flow Fingerprints
799

(1996). Real-time single-workstation obstacle avoid-
ance using only wide-field flow divergence. In Pro-
ceedings of the 13th International Conference on Pat-
tern Recognition, volume 3.
Cherubini, A. and Chaumette, F. (2012). Visual naviga-
tion of a mobile robot with laser-based collision avoid-
ance. The International Journal of Robotics Research,
32(2):189–205.
Corke, P. I. (2011). Robotics, Vision & Control: Fundamen-
tal Algorithms in Matlab. Springer.
Cummins, M. and Newman, P. (2008). Fab-map: Proba-
bilistic localization and mapping in the space of ap-
pearance. The International Journal of Robotics Re-
search, 27(6):647–665.
Diamantas, S. C. (2010). Biological and Metric Maps
Applied to Robot Homing. PhD thesis, School
of Electronics and Computer Science, University of
Southampton.
Diamantas, S. C., Oikonomidis, A., and Crowder, R. M.
(2010). Towards optical flow-based robotic homing.
In Proceedings of the International Joint Conference
on Neural Networks (IEEE World Congress on Com-
putational Intelligence), pages 1–9, Barcelona, Spain.
Diamantas, S. C., Oikonomidis, A., and Crowder, R. M.
(2011). Biologically inspired robot navigation by ex-
ploiting optical flow patterns. In Proceedings of the
International Conference on Computer Vision Theory
and Applications, pages 645–652, Algarve, Portugal.
Draper, S. O. B. A. (2011). Introduction to the bag of fea-
tures paradigm for image classification and retrieval.
https://arxiv.org/abs/1101.3354, pages 1–25.
Gibson, J. J. (1974). The Perception of the Visual World.
Greenwood Publishing Group, Santa Barbara, CA,
USA.
Hrabar, S., Sukhatme, G., Corke, P., Usher, K., and Roberts,
J. (2005). Combined optic-flow and stereo-based nav-
igation of urban canyons for a UAV. In Proceedings
of IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 302–309.
J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010).
Aggregating local descriptors into a compact image
representation. In 2010 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition,
pages 3304–3311.
Kendoul, F., Fantoni, I., and Nonami, K. (2009). Optic flow-
based vision system for autonomous 3d localization
and control of small aerial vehicles. Robotics and Au-
tonomous Systems, 57(6–7):591–602.
Liao, M., Shi, B., and Bai, X. (2018). Textboxes++: A
single-shot oriented scene text detector. IEEE Trans-
actions on Image Processing, 27(8):3676–3690.
Liao, M., Shi, B., Bai, X., Wang, X., and Liu, W. (2017).
Textboxes: A fast text detector with a single deep neu-
ral network. In AAAI.
Lowe, D. (1999). Object recognition from local scale-
invariant features. In Proceedings of the International
Conference on Computer Vision (ICCV ’99), pages
1150–1157, Corfu, Greece.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings of the 7th International Joint
Conference on Artificial Intelligence (IJCAI), August
24-28, pages 674–679.
Madjidi, H. and Negahdaripour, S. (2006). On robustness
and localization accuracy of optical flow computation
for underwater color images. Computer Vision and
Image Understanding, 104(1):61–76.
Merrell, P. C., Lee, D.-J., and Beard, R. (2004). Obsta-
cle avoidance for unmanned air vehicles using opti-
cal flow probability distributions. Sensing and Per-
ception, 5609:13–22.
Ohnishi, N. and Imiya, A. (2007). Corridor navigation and
obstacle avoidance using visual potential for mobile
robot. In Proceedings of the Fourth Canadian Confer-
ence on Computer and Robot Vision, pages 131–138.
Wang, H.-C., Finn, C., Paull, L., Kaess, M., Rosenholtz,
R., Teller, S., and Leonard, J. (2015). Bridging
text spotting and slam with junction features. In
2015 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 3701–3708.
Warren, W. and Fajen, B. R. (2004). From optic flow to
laws of control. In Vaina, L. M., Beardsley, S. A., and
Rushton, S. K., editors, Optic Flow and Beyond, pages
307–337. Kluwer Academic Publishers.
Zufferey, J.-C., Beyeler, A., and Floreano, D. (2008). Op-
tic flow to control small uavs. In IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems:
Workshop on Visual Guidance Systems for small au-
tonomous aerial vehicles, Nice, France.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
800
