
Visualization of Joint Spatio-temporal Models via Feature Recognition
with an Application to Wildland Fires
Devan G. Becker
1 a
, Douglas G. Woolford
1
and Charmaine B. Dean
2
1
Statistical and Actuarial Sciences, University of Western Ontario, London, Ontario, Canada
2
Statistics and Actuarial Science, Waterloo University, Waterloo, Ontario, Canada
Keywords:
Image Recognition, Non-negative Matrix Factorization, Log-Gaussian Cox Processes, Dimension Reduction.
Abstract:
Many spatial statistics applications result in a collection of spatial estimates, especially if a different (but
possibly correlated) estimate is produced for a sequence of time epochs. For a small collection of epochs, the
connections or trends between estimates and the prominent or common features can be found via inspection
of the spatial estimates. As the number of spatial estimates grows, this task becomes much more difficult. We
present a method of summarizing a sequence of estimates using an image recognition technique called Non-
Negative Matrix Factorization which results in a meaningful decomposition of the source images into basis
functions and coefficients. This visualization technique allows for investigation of trends over time as well as
common spatial features of the estimates without needing to fit a temporal model or use pre-specified spatial
regions. We apply this technique to a sequence of models that jointly model the spatial location of wildland
fires with the total burn area of each of the fires. We discuss the extensions of the visualization technique to
the joint modelling framework and are able to draw new insights about the connection between the location
and size of the fires.
1 INTRODUCTION
Sequences of continuous spatial fields are becoming
more common with more data collection. These can
come in the form of spatial fields measured or esti-
mated at discrete time points (e.g. sea surface temper-
ature measured daily, yearly estimates of flood risk,
etc.), multiple variables measured or estimated over
the same spatial regions (e.g. distribution of differ-
ent species across the same habitat), or some combi-
nation of the two (e.g. species distribution measured
monthly). Much work has been done to estimate mul-
tivariate spatio-temporal models, but these models are
easy to misspecify and difficult to estimate. This is
especially true in the presence of a large number of
spatial fields.
Some recent examples of analyses that resulted in
a collection of joint spatial and spatio-temporal mod-
els are as follows. A joint spatial model for predator-
prey relationships of marine species was fit for each
year in Sadykova et al. (2017). They found that most
of the covariates which were significant for habitat us-
age were likely to change with the changing climate.
a
https://orcid.org/0000-0003-3796-3946
Jones-Todd et al. (2018) fit a joint spatio-temporal
model to determine predator-prey relationships in
avian species. Their model accounted for spatio-
temporal variation, but the results of the analysis still
included a large number of spatial plots to be inter-
preted. Finally, Python et al. (2016) fit a joint spatial
model to yearly terrorist attacks around the globe.
In previous work, we performed a spatial analysis
of wildland fires (Becker et al. 2020). This involved
jointly modelling the location of fires along with the
size of those fires. Locations of fires were modelled
using a Log-Gaussian Cox Process (LGCP) frame-
work and sizes were modelled using a Log-Normal
survival model with assumed interval censoring; a
shared random effect was used to jointly model these
two outcomes. Due to computational complexity as
well as the winter creating a discontinuity between
fire seasons, we restricted our data to one year at a
time. This model setup resulted in two spatial esti-
mates per year for 47 years worth of data. While not
excessive, it was still difficult to see broad trends with
so many spatial estimates.
Here, we employ feature recognition algorithms to
summarise the joint spatial fields into basis functions.
Such techniques have been used for analysis of shot
Becker, D., Woolford, D. and Dean, C.
Visualization of Joint Spatio-temporal Models via Feature Recognition with an Application to Wildland Fires.
DOI: 10.5220/0010319602330239
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 3: IVAPP, pages
233-239
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
233

location in both basketball (Miller et al. 2014; Franks
et al. 2015) and hockey (Becker, Woolford, and Dean
2020). Those papers estimated a spatial point process
estimate for each player, then treated these estimates
as images to determine how players utilized regions of
the basketball court or hockey rink. The results illu-
minated similarities and differences between players
that would have been very difficult to discern with the
naked eye. The authors all used this analysis to create
some measure for shot optimality. In what follows we
describe an image recognition technique and demon-
strate that applying it to estimates of a sequence of
spatial models is a useful visualization technique.
2 PRELIMINARIES
2.1 Non-negative Matrix Factorization
(NMF)
Non-negative Matrix Factorization (NMF) is a dimen-
sion reduction technique that decomposes a data ma-
trix into a matrix of basis functions and a matrix of
coefficients for those basis functions. The This was
popularized as an image recognition technique by Lee
and Seung (1999), and has been used in a wide variety
of applications since (see, e.g., Gillis 2014).
For our purposes, NMF has the attractive feature
of being purely additive. That is, the estimated basis
functions as well as their coefficients are both non-
negative, so a linear combination of the bases can only
add to the estimate. In PCA, the bases and coefficients
and bases are allowed to be negative, so one basis may
be allowed to counteract the effect of another. With
purely additive bases, the basis functions all represent
a single feature. This restriction makes the estimated
basis functions directly interpretable.
The NMF algorithm works by factorizing an n×m
matrix V with non-negative entries into an n × r ma-
trix W and an r×m matrix H, where r is the number of
basis functions and must be specified prior to estima-
tion. The columns of W represent the basis functions.
Each row in the matrix H represents the coefficients
for the corresponding basis in W . With these matri-
ces, we can approximate the ith column of V , which
we will denote V
·i
, as the matrix product W H
i·
.
Under certain constraints, NMF is particularly
useful for feature recognition in images (Gillis
(2014)). Assuming all images have the same pixel
dimensions and the colour of each pixel is a single,
non-negative number (e.g., grey scale), a matrix of
images can be constructed such that each column rep-
resents a single image. For instance, suppose we have
a collection of grey scale images of faces, all of which
have the same pixel dimensions and the faces are all
aligned in the same way (e.g. all eyes and mouths are
at the same location of the image). Each image can
be represented by a vector of non-negative numbers.
The NMF algorithm will estimate basis functions that
correspond to facial features. The coefficient matrix
will determine how much of each basis function is re-
quired to construct a face.
To make this process more clear, consider
the following example. Suppose we have a ma-
trix V with n = 7 rows and m = 2 columns,
resulting in 14 entries total. The first column
is [1, 2, 3, 4, 3, 2, 1]
T
and the second column is
[2, 3, 5, 7, 5, 3, 2]
T
. Clearly, both columns have a
similar pattern (or feature). If we want to characterize
this feature, we could use an NMF decompo-
sition, where we choose r = 1 since we know
there is a single feature. Doing so results in W =
[1.259, 2.099, 3.359, 4.618, 3.359, 2.099, 1.259]
T
,
which is a matrix with seven rows (n) and
one column (r). The coefficient matrix is
H = [0.886, 1.496]. From this, the approxima-
tion for the first column of V is W × 0.886 =
[1.116, 1.86, 2.977, 4.093, 2.977, 1.86, 1.116]
T
, which
is quite close to the original first column (but with
some approximation error). Note that W and H
together have 9 entries compared to the original 14
and that inspection of W tells us about both columns
of the original matrix simultaneously.
The choice of r, the number of bases, also known
as the rank, is non-trivial. Too many basis functions
and the algorithm will simply be modelling the noise.
Too few and the approximations will not be accurate.
In some contexts, prior knowledge will be sufficient
for choosing the number of bases. In other contexts
there are numerous heuristic approaches. Techniques
have been proposed by Brunet et al. (2004), Hutchins
et al. (2008), and Frigyesi and H
¨
oglund (2008). A
properly motivated choice of r is imperative whenever
NMF is being used for analysis. As a visualization
technique, however, the choice of rank is dependent
on the usefulness of the visualizations.
Estimation of NMF models has been shown to be
NP-hard (Vavasis 2007). There have been many al-
gorithms developed to estimate the matrices (Wang
and Zhang 2013), and these methods have been im-
plemented in multiple software packages. We use the
NMF package in the R Statistical Software language,
and details can be found in Gaujoux and Seoighe
(2010).
IVAPP 2021 - 12th International Conference on Information Visualization Theory and Applications
234

2.2 NMF for Spatial Fields
To apply the NMF algorithm to estimates of a spa-
tial field, we will follow the algorithm of Miller et al.
(2014) in their analysis of shots in professional bas-
ketball. Their algorithm broadly follows four steps:
1. Set up a matrix to represent the pixel locations,
then convert this matrix to a vector. For an q × s
pixel resolution, the first row of this matrix can
be labelled p
1
= p
11
, p
12
, ... p
1s
and the kth row
can be labelled p
k
= p
k1
, p
k2
, ... p
ks
. The vector of
pixels will then have the form p = (p
1
, p
2
, ... p
q
).
2. Estimate each of the N models at the locations p.
The jth model is labelled λ
j
(p), which we will
shorten to λ
j
for convenience. Note that these es-
timates must be non-negative.
3. Combine the vectors of spatial models as col-
umn vectors in a matrix, = [λ
1
, λ
2
, ..., λ
N
], where
each λ
j
is a column.
4. Use an NMF algorithm to approximate matrices
W and H such that ≈ W H.
Due to the setup of this algorithm, the columns
of W will be spatial basis functions at pixels p and
the jth column of H will be a vector with r elements
which represent the contribution of each basis to the
approximation of λ
j
.
2.3 Shared Spatial Effects Models
The methods developed in this paper are applicable to
any joint modelling framework where a spatial field is
estimated, but are especially useful for models with a
spatial effect that is split into two.
Suppose we have a joint model of the form
f
X,Y
(x(s), y(s)|Z(s), Λ(s), φ), where x(s) and y(s) are
our spatially referenced response variables, Z(s) and
Λ(s) are two estimated spatial fields, and φ = (φ
X
, φ
Y
)
where φ
X
and φ
y
are the vectors of remaining model
parameters for X and Y , respectively, which may or
may not include further spatial terms and may have
some identical elements. Suppose further that our
model can be factored as:
f
X,Y
x(s), y(s)|Z(s), Λ(s), φ)
= f
X
(x(s)|Z(s), Λ(s), φ
x
) f
Y
(y(s)|Z(s), φ
Y
)
(1)
That is, conditional on the random field Z(s), X(s)
and Y (s) are independent. In this formulation, it is
entirely possible that one of the elements of φ
y
is an-
other spatial field. In fact, the visualization technique
that we will develop later is immediately extensible
to such a situation. For now, we are primarily inter-
ested in a model that contains a model-specific spatial
component as well as a shared spatial component.
For the purposes of this study, we do not need to
specify an estimation procedure. It is imperative that
the estimates from this technique are reasonable for
the visualization technique to be useful, but the visu-
alizations that we will present are agnostic to the par-
ticulars of the estimation procedure. In fact, the gen-
eral framework of the visualization techniques does
not require an estimate at all; it will suffice to have
any combination of estimates and/or spatially and/or
temporally referenced data.
3 NMF FOR JOINT SPATIAL
MODELS
Suppose we have a sequence of N non-negative
estimates of spatial fields Z(s) and Λ(s) esti-
mated at pixel locations p. We will define
ˆ
Z =
[
ˆ
Z
1
(p),
ˆ
Z
2
(p), ...,
ˆ
Z
N
(p)] as the matrix of spatial esti-
mates defined in Section 2.2, with
ˆ
defined similarly.
There are several potential ways to apply the NMF
algorithm to these joint spatial models. The naive ap-
proach would be to approximate
ˆ
Z ≈ W
(Z)
H
(Z)
and
ˆ
≈ W
(Λ)
H
(Λ)
. This would result in a set of basis
functions for
ˆ
Z denoted W
(Z)
, and a set of basis func-
tions for
ˆ
, W
(Λ)
. These basis functions would be en-
tirely separate and would miss pertinent shared fea-
tures.
Given the joint spatial modelling approach, we de-
sire a method for summarising the two fields that re-
tains any joint features. For instance, if large values
in Z(s) tend to correspond to large values in Λ(s), we
would like our visualizations to reflect this.
To achieve this goal, we can stack the
ˆ
Z and
ˆ
matrices as follows:
V =
ˆ
Z
1
(p)
ˆ
Z
2
(p) ...
ˆ
Z
N
(p)
ˆ
Λ
1
(p)
ˆ
Λ
2
(p) ...
ˆ
Λ
N
(p)
(2)
In this construction, each column represents both
spatial fields present in the joint modelling approach.
From this construction, any given basis function con-
tains information about both spatial fields. It is trivial
to extend this to any number of spatial fields (assum-
ing the fields are well estimated).
Alternatively, one could combine the spatial fields
side-by side:
V
(alt)
=
ˆ
Z
1
(p)
ˆ
Z
2
(p) ...
ˆ
Z
N
(p)
ˆ
Λ
1
(p)
ˆ
Λ
2
(p) ...
ˆ
Λ
N
(p)
(3)
Visualization of Joint Spatio-temporal Models via Feature Recognition with an Application to Wildland Fires
235

In this construction,
ˆ
Z and
ˆ
are still estimated
separately but will rely on the same basis functions.
To visualize the relationship between these two fields,
one could inspect the coefficients.
To visualize common similarities between spatial
field, we believe that the “stacked” approach in Equa-
tion (2) is more useful than the side-by-side approach
in Equation (3). The approximation to the estimates
will incorporate both spatial fields rather than drawing
from each field separately. The interpretation of the
basis functions will make it immediately clear how
the spatial fields are related.
4 APPLICATION TO WILDLAND
FIRES
Our data consist of the locations and total burn area
of fires from 1953 to 2000 in the province of British
Columbia, Canada. The model that we will be sum-
marising is given in full detail in Becker et al. (2020).
A brief description follows below.
The total burn area (in hectares) of a fire is mod-
elled as a log-normal random variable such that the
mean depends on an intercept, fire weather covariates,
and a spatial component. We assume that the spatial
component of this distribution can be modelled by a
Gaussian field Λ(s).
The location of lightning-caused wildland fires
is modelled by a log-Gaussian Cox process. This
model assumes that there is an underlying Gaussian
field S(s), and conditional on this field the number of
points in a region B is Poisson with rate parameter
R
B
exp(β
0
+ S(s) +C(s))ds, where β
0
is an intercept
and C(s) is the collection of spatial covariates (includ-
ing distance to the nearest highway or roadway and
elevation).
To link these two models, we separate S(s) into
two independent Gaussian fields S
1
(s) and S
2
(s) such
that exp(S(s)) = exp(S
1
(s) + γS
2
(s)) = Z(s)Λ(s)
γ
.
We chose this notation to make it explicit that Z(s)
and Λ(s) are both non-negative. The linking parame-
ter γ exists so that the estimation procedure can cause
the joint component to vanish from the LGCP model
while retaining a spatial field in the size model.
To demonstrate the results of this model, a com-
parison of the model output versus separate non-
parametric estimates is shown in Figure 1. The LGCP
random effect is clearly estimating the spatial distri-
bution of fires, and the joint component is estimat-
ing the spatial variation in size. Note that the colours
are normalized such that the maximum value is the
brightest spot and should not be used for comparison.
The plot on the left (including both the LGCP and
LGCP
Joint
A. Model−based estimates
KDE (Location)
GAM (Size)
B. Non−parametric estimates
Figure 1: A. Spatial field estimates from the joint spatial
model for wildland fires in 1990. B. Spatial non-parametric
estimates of the locations and sizes for the same data. The
colour scale is chosen for so that the largest values of the
given field are the brightest colour and are not meaningful
for comparison.
the Joint components) was converted into a vector of
pixels and combined with all of the other estimates
from this model. The NMF algorithm was run 100
times with different initial values at r = 3 to r = 20.
Based on the peaks in the cophenetic, dispersion, and
silhouette plots, and the “elbow” in the residual sum
of squares plot (as described in Chalise and Fridley
2017), we chose 8 basis functions (either 6 or 9 would
have also been supported by the diagnostic plots; they
were not as definitive as this makes it sound). Upon
visual inspection, this appears to retain interpretabil-
ity while avoiding “modelling noise”.
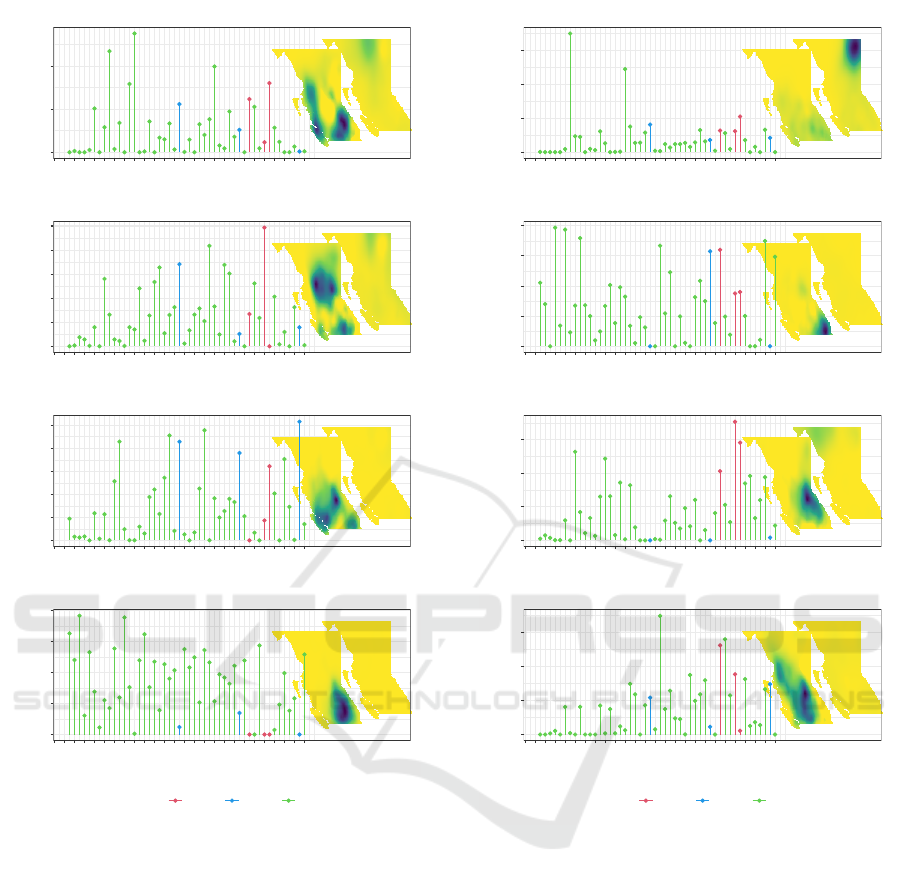
The resultant basis functions and coefficients are
shown in Figure 2. The colours will be described in
the next section. Recall that the bases are additive, so
all of the original estimates can be approximated by
adding together the non-negative bases.
The NMF algorithm allows the basis functions to
overlap, so there are multiple bases the cover the same
regions. In particular, the mountainous area near the
south east of British Columbia is partially covered by
bases 1, 2, 5, and part of 8. In contrast, it appears that
the diagonal line down the south east of BC in basis
1 is cut out of basis 6, which has a conspicuously low
value in the same area.
IVAPP 2021 - 12th International Conference on Information Visualization Theory and Applications
236
0.0
0.2
0.4
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 1
0.0
0.1
0.2
0.3
0.4
0.5
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 2
0.0
0.1
0.2
0.3
0.4
0.5
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 3
0.00
0.25
0.50
0.75
1.00
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 4
"Cluster"
Comp.1 Comp.3 No Cluster
Figure 2: Bases and Coefficients for bases 1 to 4. Within
each basis plot (the maps), the lower-left maps are the
LGCP-only effect and the upper-right maps are the shared
effects.
Basis 7 demonstrates that the estimated basis
functions are not required to be contiguous. The mul-
tiple regions in basis 7 represent places where fires
tend to ignite (or not ignite) in the same year. Much
like how bases 1 and 6 fit together, basis 7 also ap-
pears to be fit with basis 8 like a puzzle piece.
There appears to be a stark contrast between years
where fires occur in the mountainous region in the
east-by-south-east region, as described by basis 1, and
years where there are no fires in this region. The co-
efficients indicate that basis 1 is either a large com-
ponent of the LGCP estimate or it is not part of it at
all.
0.0
0.2
0.4
0.6
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 5
0.0
0.2
0.4
0.6
0.8
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 6
0.00
0.25
0.50
0.75
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 7
0.0
0.2
0.4
0.6
1950
1952
1954
1956
1958
1960
1962
1964
1966
1968
1970
1972
1974
1976
1978
1980
1982
1984
1986
1988
1990
1992
1994
1996
1998
2000
Year
Coefficient
Coef. for Basis 8
"Cluster"
Comp.1 Comp.3 No Cluster
Figure 3: Bases and Coefficients for bases 5 to 8.
The difference in coefficients for different years
reveals some potential patterns over time. This is
most evident in the increase in the coefficient for ba-
sis 2 over time. This increase is mirrored by the de-
crease in the coefficient for basis 5 over time. In par-
ticular, the coefficient for basis 2 is much higher after
1985 than before, whereas the coefficient for basis 5
is lower after 1985. Jdging by the basis functions,
this corresponds with more fires in the middle of the
province rather than the south east.
For the joint component, we see that the algorithm
has split the northern area into west (basis 1), cen-
tre (basis 7), and east (basis 3). No other bases have
positive values, indicating that the joint effect only
appears to exist in the northern regions of BC. It is
also noteworthy that the joint effects are associated
strongly with the LGCP-only effects.
Visualization of Joint Spatio-temporal Models via Feature Recognition with an Application to Wildland Fires
237

0.0
0.1
0.2
0.3
0.4
2 4 6 8
Principle Component
Percent of Variance Explained
Scree Plot for PCA
−0.4
−0.2
0.0
0.2
0.4
−0.4 0.0 0.4 0.8
PC1
PC2
"Cluster"
Comp.1 Comp.3 No Cluster
Principle Component Biplot
Figure 4: Scree plot and biplot, showing the colours that
were used in Figure 2. The points are coloured based on
how “abnormal” they are in comparison to the other points.
“Abnormality” was determined by visual inspection. The
green points are abnormal in terms of principle component
3, which is not shown.
The colours in Figure 2 are based on a princi-
ple components analysis of the estimated coefficients.
The scree plot and the biplot are shown in Figure 4.
The “clusters” are based on simply checking whether
a given point has a principle component larger than
a specified value, where the specified value was cho-
sen by hand. This is not a rigorous outlier detection
method, but rather another visualization technique.
The green points, labelled “Comp.3”, are from the
same sort of heuristic in the direction of the third prin-
ciple component.
5 CONCLUSION
We have shown that stacking multiple spatial esti-
mates in Non-negative Matrix Factorization is an ef-
fective technique for summarising a sequence of joint
spatial estimates. The algorithm setup that we have
described can easily be extended to numerous ap-
plications where a large number of spatial estimates
must be interpreted by eye.
For our particular application, the NMF technique
quickly revealed that the shared random field pri-
marily acts in the northern regions of BC. This pro-
vides insight into the relationship between fire igni-
tion, spread, weather, and suppression efforts. Intu-
itively, weather that is conducive to large fires would
also be conducive to multiple ignitions. This rela-
tionship is characterized by the joint modelling ap-
proach. However, fires are only allowed to grow un-
abated in the northern regions of BC. The fires in the
more populated southern regions are more likely to
be suppressed, which confounds the relationship be-
tween count and size.
The analysis also revealed years where the fire be-
haviour was different from other years. The increase
in the value of the coefficient for basis 2 is especially
interesting. In Becker et al. (2020), we found a sig-
nificant effect for distance to highway or railway, with
this effect approaching 0 over time. We believe that
this may be due to imperfect detection of fires that
are far from human populations. The increase in co-
efficient for basis 2 appears to support this conclu-
sion; the region of British Columbia covered by the
basis saw an increase in population over time. The
increased importance of this basis may indicate bet-
ter detection of lightning-caused fires, rather than a
change in fire behaviour.
The technique that we described is not exclusive
to joint models in the framework of our research. The
techniques would be valid if one or both of the spa-
tial fields were observed perfectly. The technique
also works for spatial models that are estimated sep-
arately, in which case the basis functions and coeffi-
cients would help deduce spatial correlation between
the variables of interest. There is no theoretical con-
straint on N, the number of observations of spatial
fields, nor is there a constraint on the number of types
of spatial fields that are stacked on top of each other.
As with any other application of NMF without
pre-defined bases, this technique is limited by the
need to investigate the rank. As a visualization tech-
nique it is worthwhile to investigate multiple values
of r, but this may be tedious and/or time consuming
depending on the size of the data.
NMF is frequently used as a clustering technique,
which is often interpreted as meaning that there is
the intention of prediction of new observations or in-
ference for population parameters. As described in
this paper, neither of these interpretations are valid.
We are applying NMF to point estimates from an-
other model while ignoring the rest of the variance.
The conclusions from this paper are broad trends, and
further investigation into individual model outputs is
required before and predictions or inferences can be
made. This visualization technique is not intended to
replace careful inspection of model output and inter-
pretation of model parameters. Instead, it is a sin-
gle, useful step in the long process of spatio-temporal
model estimation.
IVAPP 2021 - 12th International Conference on Information Visualization Theory and Applications
238

ACKNOWLEDGEMENTS
We acknowledge the support of the Natural Sci-
ences and Engineering Research Council of Canada
(NSERC), [funding reference numbers RGPIN-2015-
04221 and RGPIN-2014-06187]. Additional support
was provided by a CANSSI Collaborative Re- search
Team grant and the Institute for Catastrophic Loss Re-
duction. We would also like to thank Michael Schuck-
ers and Nathan Sandholtz for conversations regarding
the work on NMF for hockey data and Steve Taylor
for his insight into the work on wildland fire mod-
elling.
REFERENCES
Becker, Devan G., Douglas G. Woolford, and Charmaine
B. Dean. 2020. “Algorithmically Deconstructing Shot
Locations as a Method for Shot Quality in Hockey.”
Journal of Quantitative Analysis in Sports Ahead of
Print.
Becker, Devan G., Douglas G. Woolford, Charmaine B.
Dean, and W. John Braun. 2020. “Visualization
and Joint Analysis of Monitored Multivariate Spatio-
Temporal Data with Applications to Forest Fire Mod-
elling and Sports Analytics.” Western University Elec-
tronic Thesis and Dissertation Repository, March.
Brunet, J. P., P. Tamayo, T. R. Golub, and J. P. Mesirov.
2004. “Metagenes and Molecular Pattern Discovery
Using Matrix Factorization.” Proceedings of the Na-
tional Academy of Sciences 101 (12): 4164–9. https:
//doi.org/10.1073/pnas.0308531101.
Chalise, Prabhakar, and Brooke L. Fridley. 2017. “Inte-
grative Clustering of Multi-Level ‘Omic Data Based
on Non-Negative Matrix Factorization Algorithm.”
Edited by Shyamal D Peddada. PLOS ONE 12
(5): e0176278. https://doi.org/10.1371/journal.pone.
0176278.
Franks, Alexander, Andrew Miller, Luke Bornn, and Kirk
Goldsberry. 2015. “Characterizing the Spatial Struc-
ture of Defensive Skill in Professional Basketball.”
The Annals of Applied Statistics 9 (1): 94–121. https:
//doi.org/10.1214/14-AOAS799.
Frigyesi, Attila, and Mattias H
¨
oglund. 2008. “Non-
Negative Matrix Factorization for the Analysis of
Complex Gene Expression Data: Identification of
Clinically Relevant Tumor Subtypes.” Cancer In-
formatics 6 (January): CIN.S606. https://doi.org/10.
4137/CIN.S606.
Gaujoux, Renaud, and Cathal Seoighe. 2010. “A Flexible
Software Package for Nonnegative Matrix Factoriza-
tion,” 9.
, Nicolas. 2014. “The Why and How of Nonnegative Ma-
trix Factorization.” arXiv:1401.5226 [Cs, Math, Stat],
March. http://arxiv.org/abs/1401.5226.
Hutchins, Lucie N., Sean M. Murphy, Priyam Singh, and
Joel H. Graber. 2008. “Position-Dependent Motif
Characterization Using Non-Negative Matrix Factor-
ization.” Bioinformatics 24 (23): 2684–90. https://doi.
org/10.1093/bioinformatics/btn526.
Jones-Todd, Charlotte M., Ben Swallow, Janine B. Illian,
and Mike Toms. 2018. “A Spatiotemporal Multi-
species Model of a Semicontinuous Response.” Jour-
nal of the Royal Statistical Society: Series C (Ap-
plied Statistics) 67 (3): 705–22. https://doi.org/10.
1111/rssc.12250.
Lee, Daniel D., and H. Sebastian Seung. 1999. “Learning
the Parts of Objects by Non-Negative Matrix Factor-
ization.” Nature 401 (6755): 788–91. https://doi.org/
10.1038/44565.
Miller, Andrew, Luke Bornn, Ryan Adams, and Kirk
Goldsberry. 2014. “Factorized Point Process Inten-
sities: A Spatial Analysis of Professional Basketball.”
arXiv:1401.0942 [Stat], January. http://arxiv.org/abs/
1401.0942.
Python, Andr
´
e, Janine Illian, Charlotte Jones-Todd,
and Marta Blangiardo. 2016. “A Bayesian Ap-
proach to Modelling Fine-Scale Spatial Dynamics
of Non-State Terrorism: World Study, 2002-2013.”
arXiv:1610.01215 [Stat], October. http://arxiv.org/
abs/1610.01215.
Sadykova, Dinara, Beth E. Scott, Michela De Dominicis,
Sarah L. Wakelin, Alexander Sadykov, and Judith
Wolf. 2017. “Bayesian Joint Models with INLA Ex-
ploring Marine Mobile PredatorPrey and Competitor
Species Habitat Overlap.” Ecology and Evolution 7
(14): 5212–26. https://doi.org/10.1002/ece3.3081.
Vavasis, Stephen A. 2007. “On the Complexity of Nonneg-
ative Matrix Factorization.” arXiv:0708.4149 [Cs],
September. http://arxiv.org/abs/0708.4149.
Wang, Yu-Xiong, and Yu-Jin Zhang. 2013. “Nonnega-
tive Matrix Factorization: A Comprehensive Review.”
IEEE Transactions on Knowledge and Data Engineer-
ing 25 (6): 1336–53. https://doi.org/10.1109/TKDE.
2012.51.
Visualization of Joint Spatio-temporal Models via Feature Recognition with an Application to Wildland Fires
239
