
A Photogrammetry-based Framework to Facilitate Image-based
Modeling and Automatic Camera Tracking
Sebastian Bullinger
a
, Christoph Bodensteiner
b
and Michael Arens
c
Department of Object Recognition, Fraunhofer IOSB, Ettlingen, Germany
Keywords:
Image-based Modeling, Camera Tracking, Photogrammetry, Structure from Motion, Multi-view Stereo,
Blender.
Abstract:
We propose a framework that extends Blender to exploit Structure from Motion (SfM) and Multi-View Stereo
(MVS) techniques for image-based modeling tasks such as sculpting or camera and motion tracking. Apply-
ing SfM allows us to determine camera motions without manually defining feature tracks or calibrating the
cameras used to capture the image data. With MVS we are able to automatically compute dense scene models,
which is not feasible with the built-in tools of Blender. Currently, our framework supports several state-of-the-
art SfM and MVS pipelines. The modular system design enables us to integrate further approaches without
additional effort. The framework is publicly available as an open source software package.
1 INTRODUCTION
1.1 Photogrammetry-based Modeling
and Camera Tracking
Many tasks in the area of image-based modeling or
visual effects such as sculpting or motion and camera
tracking involve a substantial amount of user inter-
action to achieve satisfying results. Even with many
modern tools like Blender (Blender Online Commu-
nity, 2020), designers require to perform many steps
manually. With the recent progress of Structure from
Motion (SfM), Multi-View Stereo (MVS) and textur-
ing techniques the automation of specific steps such
as the determination of the camera motion and the re-
construction of the scene geometry (including texture
computation) has become feasible.
Using common mesh data formats, the majority of
modeling tools allows to import the reconstructed ge-
ometry and corresponding textures of state-of-the-art
MVS (Fuhrmann and Goesele, 2014; Jancosek and
Pajdla, 2014; Sch
¨
onberger et al., 2016; Ummenhofer
and Brox, 2017) and texturing libraries (Burt and
Adelson, 1983; Waechter et al., 2014). However,
such data formats do not include camera calibration
a
https://orcid.org/0000-0002-1584-5319
b
https://orcid.org/0000-0002-5563-3484
c
https://orcid.org/0000-0002-7857-0332
Figure 1: Reconstruction result of the sceaux dataset
(Moulon, 2012) in the 3D view of Blender including the re-
constructed camera poses as well as the corresponding point
cloud.
and camera motion information, which is crucial for
many tasks such as creating visual effects.
In order to overcome these limitations, we created
a framework that enables us to integrate reconstruc-
tions of different state-of-the-art SfM and MVS li-
braries into Blender - see Fig. 1 for an example. Since
the source code of all components is publicly avail-
able, the full pipeline is not only suitable for model-
ing or creating visual effects, but especially for future
research efforts.
At the same time, our framework servers in com-
bination with Blender’s animation and rendering ca-
pabilities as a tool for the photogrammetry commu-
nity that offers sophisticated inspection and visualiza-
106
Bullinger, S., Bodensteiner, C. and Arens, M.
A Photogrammetr y-based Framework to Facilitate Image-based Modeling and Automatic Camera Tracking.
DOI: 10.5220/0010319801060112
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2021) - Volume 1: GRAPP, pages
106-112
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Input
Images
Feature
Matching
Feature
Extraction
Geometric
Verification
Correspondence
Search
Image
Registration
Initial-
ization
Triangu-
lation
Outlier
Filtering
Bundle
Adjustment
Sparse Reconstruction
Multi-View
Fusion
Multi-View
Stereo
Surface
Recon-
struction
Dense / Mesh
Reconstruction
Model
Figure 2: Building blocks of state-of-the-art incremental Structure from Motion and Multi-view Stereo pipelines. The input
images are part of the Sceaux Castle dataset Moulon (2012).
tion functionalities, which are not present in other ed-
itors such as Meshlab (Cignoni et al., 2008) or Cloud-
Compare (Daniel Girardeau-Montaut, 2020).
1.2 Related Work
SfM is a photogrammetric technique that estimates
for a given set of (unordered) input images the corre-
sponding three-dimensional camera poses and scene
structures. There are two categories of SfM ap-
proaches: incremental and global SfM. Incremental
SfM is currently the prevalent state-of-the-art method
(Sch
¨
onberger and Frahm, 2016). In order to man-
age the problem complexity of reconstructing real-
world scenes, incremental SfM decomposes the re-
construction process into more controllable subprob-
lems. The corresponding tasks can be categorized
in correspondence search (including feature detec-
tion, feature matching and geometric verification) and
sparse reconstruction (consisting of image registra-
tion, point triangulation, bundle adjustment and out-
lier filtering). During bundle adjustment, SfM mini-
mize the reprojection error of the reconstructed three-
dimensional points for each view.
MVS uses the camera poses and the sparse point
cloud obtained in the SfM step to compute a dense
point cloud or a (textured) model reflecting the ge-
ometry of the input scene. Similarly to SfM, MVS di-
vides the reconstruction task in multiple subproblems.
The multi-view stereo step computes a depth map for
each registered image that potentially includes sur-
face normal vectors. Multi-view fusion fuses the depth
maps into a unified dense reconstruction that allows
to reconstruct a watertight surface model in the sur-
face reconstruction step. Fig. 2 shows an overview of
essential SfM and MVS subtasks and their dependen-
cies.
Currently, there are several state-of-the-art pho-
togrammetry libraries that provide full SfM and
MVS pipelines such as Colmap (Sch
¨
onberger, 2020),
Meshroom (AliceVision, 2020a), Multi-View En-
vironment (Fuhrmann et al., 2014), OpenMVG
(Moulon et al., 2013) & OpenMVS (Cernea, 2020)
as well as Regard3D (Hiestand, 2020). For a quan-
titative evaluation of state-of-the-art SfM and MVS
pipelines on outdoor and indoor scenes see Knapitsch
et al. (2017), which provides a benchmark dataset us-
ing laser scans as ground truth.
While the usage of the reconstructed (textured)
models is widely supported by modern modeling
tools, the integration of camera-specific information
such as intrinsic and extrinsic parameters are often-
times neglected. There are only a few software pack-
ages available that allow to import camera-specific
information into modeling programs. The major-
ity of these packages address specific proprietary re-
construction or modeling tools such as AliceVision
(2020b), SideEffects (2020) or Uhl
´
ık (2020). The
most similar tool compared to the proposed frame-
work is presumably Attenborrow (2020), which also
provides options to import SfM and MVS formats into
Blender. However, the following capabilities of our
framework are missing in Attenborrow (2020): vi-
sualization of colored point clouds, representation of
source images as image planes and creation of point
clouds from depth maps. Further, Attenborrow (2020)
supports less SfM and MVS libraries and provides
less options to configure the input data.
1.3 Contribution
The core contribution of this work are as follows.
(1) The proposed framework allows to leverage
image-based reconstructions (e.g. automatic calibra-
tion of intrinsic camera parameters, computation of
three-dimensional camera poses and reconstruction of
scene structures) for different tasks in Blender such as
sculpting or creating visual effects.
(2) We use available data structures in Blender to rep-
resent the integrated reconstruction results, which al-
A Photogrammetry-based Framework to Facilitate Image-based Modeling and Automatic Camera Tracking
107
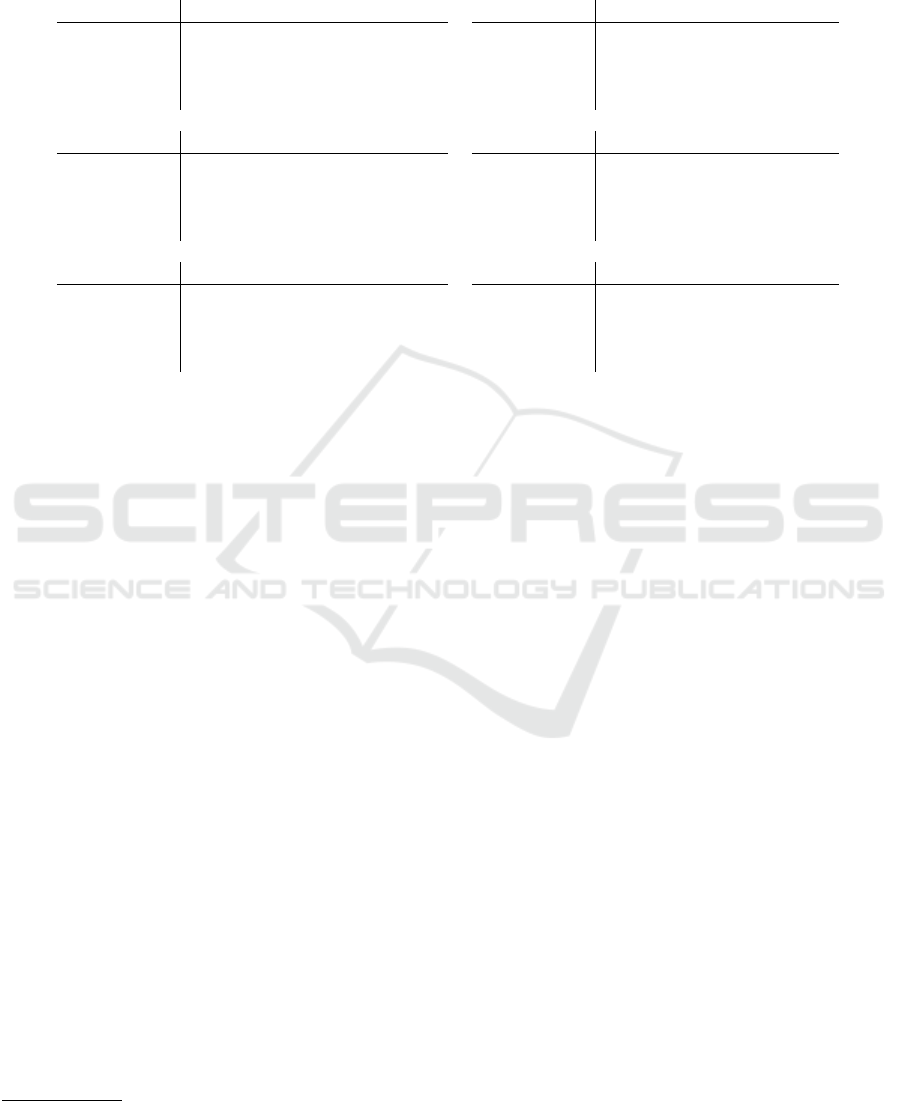
Table 1: Overview of photogrammetry pipelines that are supported by the proposed framework. For each pipeline the ta-
ble shows the corresponding methods to compute the different reconstruction steps including Structure from Motion (SfM),
Multi-view Stereo (MVS), surface reconstruction (Surface Rec.) and texturing. In many cases the pipelines allow to sub-
stitute specific pipeline steps using alternative implementations. This table shows the default or the recommended pipeline
configurations.
Pipeline Colmap
SfM Sch
¨
onberger and Frahm (2016)
MVS Sch
¨
onberger et al. (2016)
Surface Rec. Kazhdan and Hoppe (2013)
Texturing -
Pipeline MVE
SfM Fuhrmann et al. (2014)
MVS Goesele et al. (2007)
Surface Rec. Fuhrmann and Goesele (2014)
Texturing Waechter et al. (2014)
Pipeline Regard3D
SfM Moulon et al. (2012)
MVS Langguth et al. (2016)
Surface Rec. Fuhrmann and Goesele (2014)
Texturing
Waechter et al. (2014)
Pipeline Meshroom
SfM Moulon et al. (2012)
MVS Hirschmuller (2005)
Surface Rec. Jancosek and Pajdla (2014)
Texturing Burt and Adelson (1983)
Pipeline OpenMVG / OpenMVS
SfM Moulon et al. (2012)
MVS Barnes et al. (2009)
Surface Rec. Jancosek and Pajdla (2014)
Texturing Waechter et al. (2014)
Pipeline VisualSfM
SfM Moulon et al. (2012)
MVS Furukawa and Ponce (2010)
Surface Rec. -
Texturing
-
lows the framework to compute automatic camera an-
imations (including extrinsic and intrinsic camera pa-
rameters), represent the reconstructed point clouds as
particle system or attach the source images to the reg-
istered camera poses. Using the available data struc-
tures in Blender ensures that the integrated results can
be further utilized.
(3) This framework provides (together with Blender’s
built-in tools) different visualization and anima-
tion capabilities for image-based reconstructions
that are superior to tools offered by common
photogrammetry-specific software packages.
(4) The framework supports already many state-of-
the-art open source SfM and MVS pipelines and is
(because of its modular design) easily extensible.
(5) The source code of framework is publicly avail-
able
1
.
2 FRAMEWORK
2.1 Overview
The proposed framework allows us to import the
reconstructed scene geometry represented as point
cloud or as (textured) mesh, the reconstructed cam-
eras (including intrinsic and extrinsic parameters),
point clouds corresponding to the depth maps of
the cameras and an animated camera represent-
ing the camera motion. The supported libraries
1
Source code is available at https://github.com/SBCV/
Blender-Addon-Photogrammetry-Importer
include the following photogrammetry pipelines:
Colmap (Sch
¨
onberger, 2020), Multi-View Environ-
ment (Fuhrmann et al., 2014), OpenMVG (Moulon
et al., 2013) & OpenMVS (Cernea, 2020) and Mesh-
room (AliceVision, 2020a) as well as VisualSfM (Wu,
2011). Table 1 contains an overview of each pipeline
with the corresponding reconstruction steps. An ex-
ample reconstruction result of Colmap is shown in
Fig. 3a.
In addition to the SfM and MVS libraries men-
tioned above, the system supports the integration of
camera poses or scene structures captured with RGB-
D sensors using Zhou et al. (2018) as well as point
clouds provided in common laser scanning data for-
mats.
2.2 Architecture
We followed a modular design approach in order
to simplify the extensibility of the framework. An
overview of the different components and their de-
pendencies is shown in Fig. 4. Each supported li-
brary requires the implementation of a corresponding
FileHandler and ImportOperator. The FileHandler
parses library specific file formats or directory struc-
tures and returns library agnostic information of cam-
eras, points and meshes. The ImportOperator may
use different classes provided by the framework such
as the CameraImporter, PointImporter and MeshIm-
porter to define the required import options and to im-
port the reconstruction information extracted by the
FileHandler.
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
108

(a) Reconstructed geometry represented as mesh with vertex
colors in the 3D view of Blender.
(b) Reconstructed point cloud in the 3D view of Blender from
the perspective of one of the reconstructed cameras. The
background image shows the corresponding input image used
to register the camera.
Figure 3: Reconstructed geometry in the 3D view of Blender.
Figure 4: Integration of the proposed framework in Blender - illustrated with the Colmap importer. The class
bpy.types.Operator provided by Blender allows to define custom operators that can be register with bpy.utils. In order to
support additional SfM and MVS libraries it is sufficient to implement the corresponding import operators and file handlers.
To simplify the figure only relevant classes and methods are shown.
2.3 Camera and Image Representation
The supported SfM and MVS libraries use different
camera models to represent the intrinsic camera pa-
rameters during the reconstructions process. Further,
the conventions describing the extrinsic camera pa-
rameters are also inconsistent. We convert the differ-
ent formats into a unified representation that can be
directly mapped to Blender’s camera objects.
In addition to the integration of the geometric
properties of the reconstructed cameras, the frame-
work provides an option to add each input image as
background image for the corresponding camera ob-
ject. Viewing the scene from the perspective of a spe-
cific camera allows to assess the consistency of virtual
objects and the corresponding source images, which
is especially useful for sculpting tasks. It also of-
fers convenient capabilities to visualize and inspect
the reconstructed point clouds and meshes, which are
not feasible with other photogrammetry-specific tools
such as CloudCompare and Meshlab. Fig. 3b shows
for example a comparison of the projected point cloud
and the color information of the corresponding input
image.
To further enhance the visualization, the system
provides an option to add the original input images as
separate image planes as shown in Fig. 1.
In order to ease the usage of the reconstruction
for animation and visual effect tasks, the framework
offers an option to create an animated camera us-
ing the reconstructed camera poses as well as the
corresponding intrinsic parameters such as the focal
length and the principal point. All parameters are
animated by using Blender’s built-in f-curves, which
A Photogrammetry-based Framework to Facilitate Image-based Modeling and Automatic Camera Tracking
109
(a) Reconstruction result in Blender’s 3D view. The
reconstructed cameras are shown in black and the ani-
mated camera in orange, respectively.
(b) Interpolation values of the translation and the rotation correspond-
ing to the animated camera in the left image. The black dots denote
the values of the reconstructed camera poses and the vertical blue line
indicates the interpolated values at the position of the camera in the
left image.
Figure 5: Example of a camera animation using 11 images of the Sceaux Castle dataset (Moulon, 2012). By interpolating the
poses of the reconstructed cameras, we obtain a smooth trajectory for the animated camera.
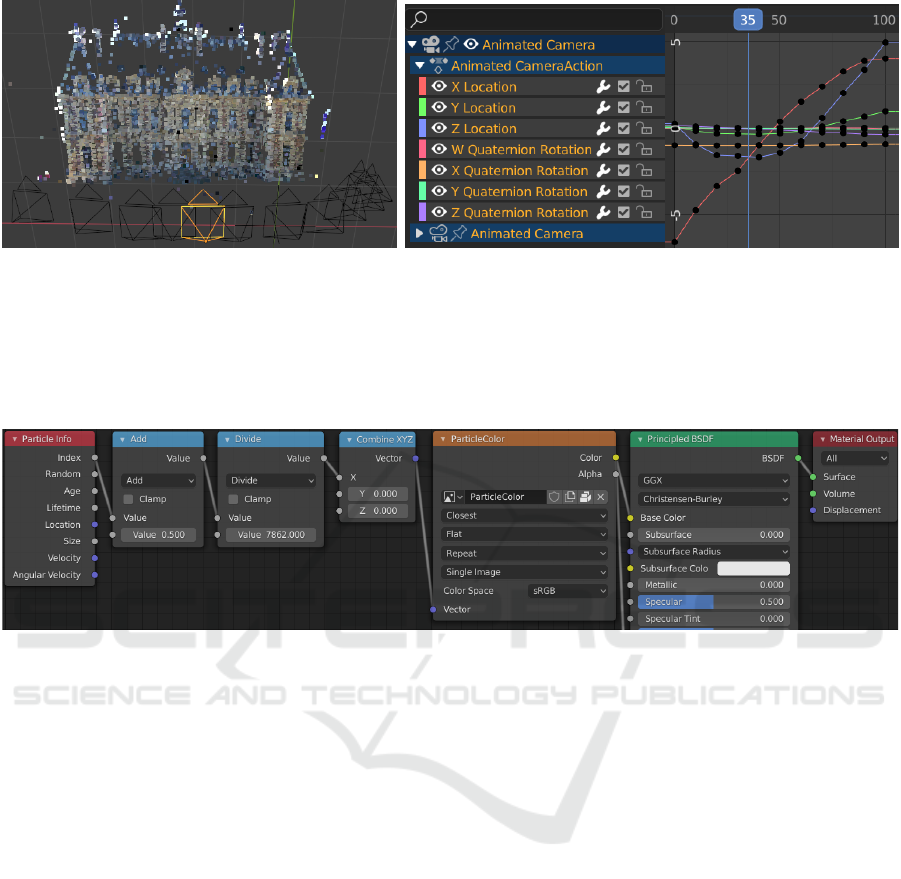
Figure 6: Node configuration created by the framework to define colors of the particles in the particle system. The light blue
nodes use the particle index to compute the texture coordinate with the corresponding color - the value in the divide node
represents the number of total particles. The principled BSDF node has been cut to increase the compactness of the figure.
allows to post-process the result with Blender’s ani-
mation tools. The camera properties between two re-
constructed camera poses are interpolated to enable
the creation of smooth camera trajectories. Fig. 5
shows an example of the animated camera and the
corresponding interpolated properties. The f-curves
use quaternions to define the camera rotations of the
animated camera. We normalize the quaternions rep-
resenting the rotations of the reconstructed cameras
to avoid unexpected interpolation results caused by
quaternions with different signs, i.e. we ensure that
the quaternions show consistent signs, which mini-
mizes the distance between two consecutive quater-
nions.
2.4 Representation of Scene Geometry
Photogrammetry-based reconstruction techniques
frequently use two types of entities to represent the
reconstructed scene structure: point clouds and (tex-
tured) meshes. While meshes provide a more holistic
representation of the scene geometry, point clouds
are typically more accurate - since the reconstructed
points correspond to image correspondences.
Currently, there is no Blender entity that permits
to directly represent colored point clouds. Our
framework circumvents this problem by providing
the following two point cloud representations: point
clouds represented with Blender’s particle system
and point clouds visualized with OpengGL (Woo
et al., 1999).
The particle system allows us to represent each 3D
point with a single particle, which enables us to post-
process and render the reconstructed result. We define
the particle colors with Blender’s node system. The
proposed framework uses the ID of each particle to
determine a texture coordinate of single texture con-
taining all particle colors. The corresponding nodes
are shown in Fig. 6.
In contrast to Blender’s particle system, the draw-
ing of point clouds with OpenGL is computationally
less expensive and enables to visualize larger point
clouds. Thus, it is better suited for the visualization of
large point numbers such as point clouds representing
the depth maps of multiple input images. Fig. 7 shows
an example.
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
110
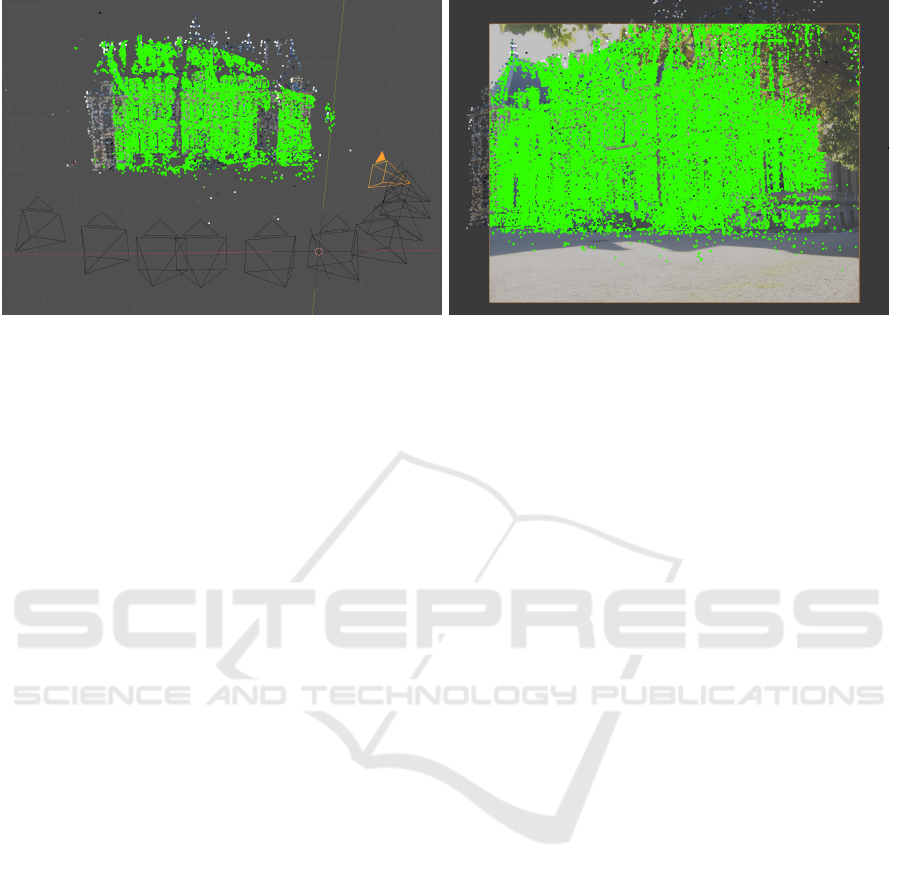
(a) Reconstructed point cloud and depth map of the rightmost
camera highlighted with orange.
(b) Depth map from the perspective of one of the recon-
structed cameras. The background image shows the input im-
age used to register the camera.
Figure 7: Representation of a depth map using OpenGL. Both images show the triangulated points corresponding to the depth
map of the same camera. Using Blender’s 3D view allows us to assess the consistency of the depth map w.r.t. to the point
cloud (see Fig. 7a) as well as the consistency of the depth w.r.t. to visual cues in source image (Fig. 7b).
We use Blender’s built-in data structures to rep-
resent the reconstructed and potentially textured
meshes. This allows us to integrate the triangulated
scene geometry (i.e. points and meshes) in the same
coordinate system as the registered cameras as shown
in Fig. 3.
3 CONCLUSION
This paper proposes a publicly available extension of
Blender that enables to integrate reconstructions of
different SfM and MVS libraries to facilitate tasks
such as image-based modeling and automatic cre-
ation of camera animations. We presented a general
overview of the core components of modern SfM and
MVS methods and provided a summary of widely
used state-of-the-art reconstruction pipelines that are
supported by our system. The paper provides a de-
tailed description of the objects used to model the
reconstructed cameras and the corresponding three-
dimensional scene points as well as the representa-
tions used to integrate camera motion and additional
image information. We showed several automatically
computed examples that illustrate the usefulness of
the presented framework. We are convinced that the
application of SfM and MVS libraries is a crucial
step to facilitate image-based modeling and camera
tracking tasks. The analysis of the download statis-
tics show that our Blender extension is adopted by a
variety of artists and researchers.
REFERENCES
AliceVision (2020a). Meshroom: A 3D reconstruction soft-
ware. https://github.com/alicevision/meshroom. [Ac-
cessed October 2020].
AliceVision (2020b). MeshroomMaya: A Maya plugin
that enables to model 3D objects from images. https:
//github.com/alicevision/MeshroomMaya. [Accessed
October 2020].
Attenborrow, S. (2020). Blender Photogrammetry. https:
//github.com/stuarta0/blender-photogrammetry. [Ac-
cessed October 2020].
Barnes, C., Shechtman, E., Finkelstein, A., and Goldman,
D. B. (2009). Patchmatch: A randomized correspon-
dence algorithm for structural image editing. ACM
Trans. Graph., 28(3).
Blender Online Community (2020). Blender - a 3D mod-
elling and rendering package. http://www.blender.org.
[Accessed October 2020].
Burt, P. J. and Adelson, E. H. (1983). A multiresolution
spline with application to image mosaics. ACM Trans.
Graph., 2(4):217–236.
Cernea, D. (2020). OpenMVS: Multi-view stereo re-
construction library. https://cdcseacave.github.io/
openMVS. [Accessed October 2020].
Cignoni, P., Callieri, M., Corsini, M., Dellepiane, M.,
Ganovelli, F., and Ranzuglia, G. (2008). MeshLab:
an Open-Source Mesh Processing Tool. In Scarano,
V., Chiara, R. D., and Erra, U., editors, Eurographics
Italian Chapter Conference. The Eurographics Asso-
ciation.
Daniel Girardeau-Montaut (2020). Cloudcompare. http:
//www.cloudcompare.org/. [Accessed October 2020].
Fuhrmann, S. and Goesele, M. (2014). Floating scale sur-
face reconstruction. ACM Trans. Graph., 33(4).
A Photogrammetry-based Framework to Facilitate Image-based Modeling and Automatic Camera Tracking
111

Fuhrmann, S., Langguth, F., and Goesele, M. (2014). Mve:
A multi-view reconstruction environment. In Pro-
ceedings of the Eurographics Workshop on Graphics
and Cultural Heritage, GCH ’14, page 11–18, Goslar,
DEU. Eurographics Association.
Furukawa, Y. and Ponce, J. (2010). Accurate, dense, and
robust multi-view stereopsis. IEEE Trans. on Pattern
Analysis and Machine Intelligence, 32(8):1362–1376.
Goesele, M., Snavely, N., Curless, B., Hoppe, H., and Seitz,
S. M. (2007). Multi-view stereo for community photo
collections. In 2007 IEEE 11th International Confer-
ence on Computer Vision, pages 1–8.
Hiestand, R. (2020). Regard3D: A free and open source
structure-from-motion program. [Accessed October
2020].
Hirschmuller, H. (2005). Accurate and efficient stereo pro-
cessing by semi-global matching and mutual informa-
tion. In 2005 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition (CVPR’05),
volume 2, pages 807–814 vol. 2.
Jancosek, M. and Pajdla, T. (2014). Exploiting visibil-
ity information in surface reconstruction to preserve
weakly supported surfaces. International Scholarly
Research Notices, 2014:1–20.
Kazhdan, M. and Hoppe, H. (2013). Screened poisson sur-
face reconstruction. ACM Transactions on Graphics
(TOG).
Knapitsch, A., Park, J., Zhou, Q.-Y., and Koltun, V.
(2017). Tanks and temples: Benchmarking large-scale
scene reconstruction. ACM Transactions on Graphics,
36(4).
Langguth, F., Sunkavalli, K., Hadap, S., and Goesele, M.
(2016). Shading-aware multi-view stereo. In Proceed-
ings of the European Conference on Computer Vision
(ECCV).
Moulon, P. (2012). Sceaux castle dataset. https://github.
com/openMVG/ImageDataset
SceauxCastle. [Ac-
cessed October 2020].
Moulon, P., Monasse, P., and Marlet, R. (2012). Adap-
tive structure from motion with a contrario model es-
timation. In Asian Conference on Computer Vision
(ACCV).
Moulon, P., Monasse, P., Marlet, R., and Others (2013).
OpenMVG. An open multiple view geometry library.
https://github.com/openMVG/openMVG/. [Accessed
October 2020].
Sch
¨
onberger, J. L. (2020). COLMAP: A general-purpose
Structure-from-Motion and Multi-View Stereo
pipeline. https://github.com/colmap/colmap. [Ac-
cessed October 2020].
Sch
¨
onberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Sch
¨
onberger, J. L., Zheng, E., Pollefeys, M., and Frahm, J.-
M. (2016). Pixelwise view selection for unstructured
multi-view stereo. In European Conference on Com-
puter Vision (ECCV).
SideEffects (2020). Game Development Toolset
for Houdini. https://github.com/sideeffects/
GameDevelopmentToolset. [Accessed October
2020].
Uhl
´
ık, J. (2020). Agisoft Photoscan Importer for Blender.
https://github.com/uhlik/bpy. [Accessed October
2020].
Ummenhofer, B. and Brox, T. (2017). Global, dense multi-
scale reconstruction for a billion points. International
Journal of Computer Vision, pages 1–13.
Waechter, M., Moehrle, N., and Goesele, M. (2014). Let
there be color! large-scale texturing of 3d reconstruc-
tions. In Fleet, D., Pajdla, T., Schiele, B., and Tuyte-
laars, T., editors, Computer Vision – ECCV 2014,
pages 836–850, Cham. Springer International Pub-
lishing.
Woo, M., Neider, J., Davis, T., and Shreiner, D. (1999).
OpenGL programming guide: the official guide to
learning OpenGL, version 1.2. Addison-Wesley
Longman Publishing Co., Inc.
Wu, C. (2011). Visualsfm: A visual structure from motion
system. http://ccwu.me/vsfm/.
Zhou, Q.-Y., Park, J., and Koltun, V. (2018). Open3D:
A modern library for 3D data processing.
arXiv:1801.09847.
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
112
