
Rig-space Neural Rendering: Compressing the Rendering of Characters
for Previs, Real-time Animation and High-quality Asset Re-use
Dominik Borer
1,2
, Lu Yuhang
1
, Laura W
¨
ulfroth
1
, Jakob Buhmann
2
and Martin Guay
2
1
Computer Graphics Laboratory, ETH Z
¨
urich, Switzerland
2
Disney Research Studios, Z
¨
urich, Switzerland
Keywords:
Asset Re-use, Neural Rendering, Real-time Rendering.
Abstract:
Movie productions use high resolution 3d characters with complex proprietary rigs to create the highest quality
images possible for large displays. Unfortunately, these 3d assets are typically not compatible with real-
time graphics engines used for games, mixed reality and real-time pre-visualization. Consequently, the 3d
characters need to be re-modeled and re-rigged for these new applications, requiring weeks of work and
artistic approval. Our solution to this problem is to learn a compact image-based rendering of the original 3d
character, conditioned directly on the rig parameters. Our idea is to render the character in many different
poses and views, and to train a deep neural network to render high resolution images, from the rig parameters
directly. Many neural rendering techniques have been proposed to render from 2d skeletons, or geometry and
UV maps. However these require additional steps to create the input structure (e.g. a low res mesh), often hold
ambiguities between front and back (e.g. 2d skeletons) and most importantly, do not preserve the animator’s
workflow of manipulating specific type of rigs, as well as the real-time game engine pipeline of interpolating
rig parameters. In contrast, our model learns to render an image directly from the rig parameters at a high
resolution. We extend our architecture to support dynamic re-lighting and composition with other objects in
the scene. By generating normals, depth, albedo and a mask, we can produce occlusion depth tests and lighting
effects through the normals.
1 INTRODUCTION
Feature movie productions use high resolution char-
acters with complex proprietary rigs to create the
highest quality possible images for large displays. It
is very often the case that these characters would be
wanted and useful in a real-time setting, such as for
previs, games or augmented reality experiences. Un-
fortunately, the high resolution assets cannot be ren-
dered in real-time and the production rigs are often
not easily transferable to game engine deformers (i.e.
linear blend skinning and blend shapes). In conse-
quence, characters must re-created manually includ-
ing re-modeling their geometry with fewer polygons,
re-creating textures with fewer details and re-rigging
and re-animating their movements. This process can
be longer than expected, as the initial artistic intent of
the character may be lost in these steps.
Our solution to this problem is to treat the ren-
dering of the character as a learned image-based ren-
dering task, conditioned on 3d rig parameters such as
a kinematic skeleton, blend shapes, or coarse mesh
vertices. Our approach consists of rendering the 3d
character in different 3d poses and views, and to save
the corresponding 3d rig information as labels. We
then train a deep neural network (DNN) to predict the
rendered image from the 3d rig parameters. To allow
dynamic lighting and scene composition, as well as
produce high resolution images, we designed a pro-
gressive multi-branch generative network that outputs
albedo, normals, mask and depth map. The different
scene feature maps can be composed together with
other scene elements (e.g. through a depth buffer test)
to render the final image of the scene with the char-
acter in it. At run-time, the application manipulates
the rig parameters, such as the skeleton via traditional
spline interpolation, and feeds the parameters to the
network to produce the required scene feature maps
in real-time.
One of the main challenges with image-based ren-
dering are ghosting effects during interpolation and
extrapolation to new views and movements. This is
especially the case when undergoing large deforma-
tions, such as with articulated systems. We evaluate
both pose and view generalization capabilities, and
show results in our accompanying video. In a nut-
shell, our network architecture (section 4) and data
generation process (section 3) achieves qualitatively
300
Borer, D., Yuhang, L., Wülfroth, L., Buhmann, J. and Guay, M.
Rig-space Neural Rendering: Compressing the Rendering of Characters for Previs, Real-time Animation and High-quality Asset Re-use.
DOI: 10.5220/0010334503000307
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 1: GRAPP, pages
300-307
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
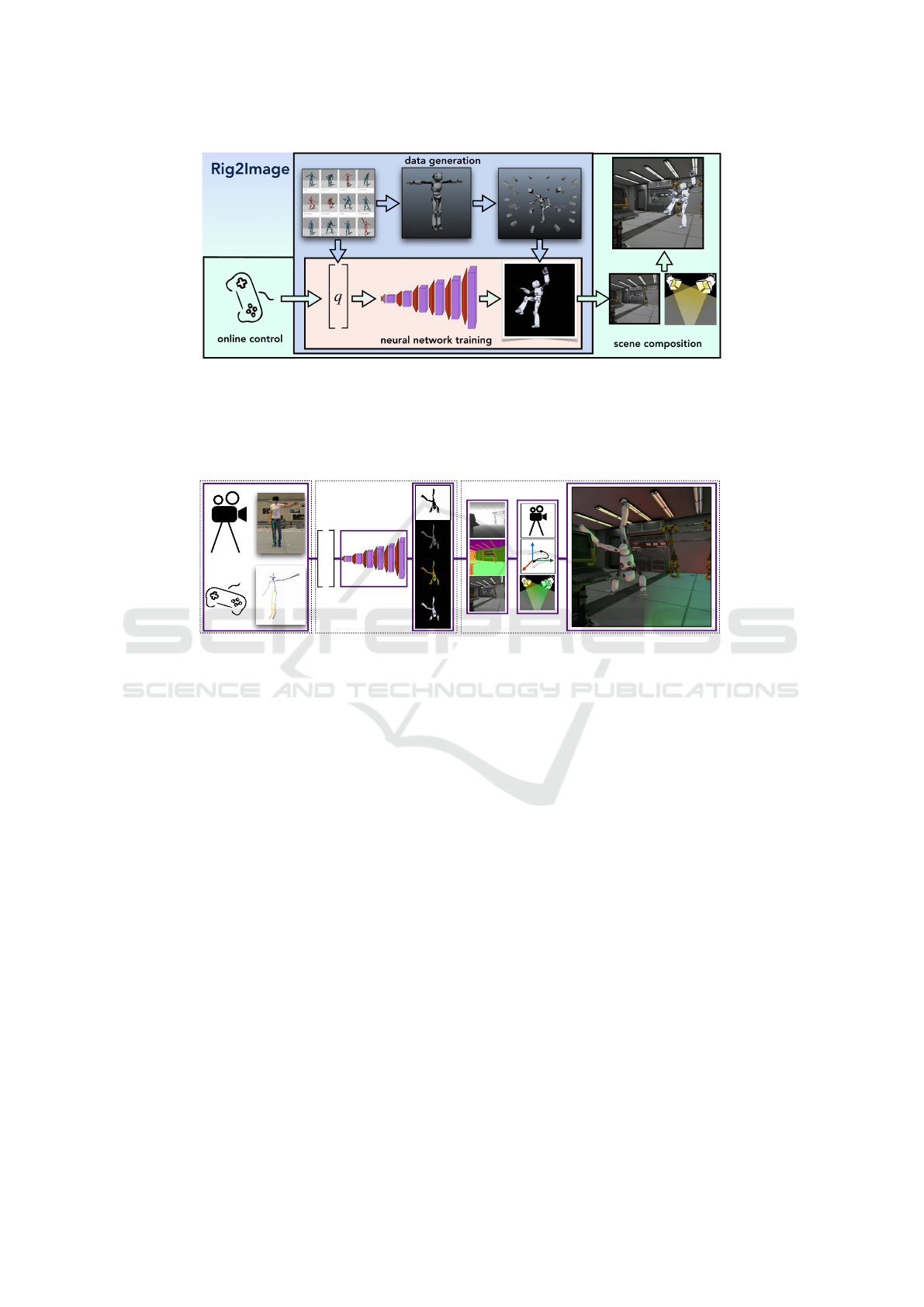
Figure 1: With rig-space neural rendering, we train a deep neural network (DNN) to generate an image of a character directly
from rig parameters, such as skeleton joint angles. We first generate the training set (blue area) by posing the character in many
poses and views, while saving the rig parameters associated to the images. We then train a DNN to generate the character
image from the rig parameters (red area). Finally, at run-time (green area) we control the rig parameters and feed them to our
Rig2Image network that generates an image in real-time, which we then overlay onto scene background. Details on how to
extend this to dynamic lights and interactions with other scene objects are shown in figures below.
q
a) rig control b) network predictions c) scene composition
Figure 2: a) Real-time applications control a skeleton or rig, as usual by blending skeletons, or by live capturing a human
performer. b) The skeleton is then fed to our Rig2Image network that renders scene maps in real-time. c) These scene maps
are then composed with dynamic lights as well as other scene objects in front and behind via the depth map, resulting in a
final coherent scene.
good generalization for interpolating views, but re-
mains challenged by extrapolating new movements,
never seen in the training data. Before we discuss our
approach in detail, let us now discuss relevant work.
2 RELATED WORK
One of the main benefits our approach
brings over traditional image-based rendering
(Debevec et al., 1996, Levoy and Hanrahan, 1996,
Sch
¨
odl et al., 2000, Buehler et al., 2001,
Sch
¨
odl and Essa, 2002, Carranza et al., 2003,
Germann et al., 2010, Xu et al., 2011,
Casas et al., 2014, Volino et al., 2014) and more
recent forms of learned rendering (Isola et al., 2016,
Chan et al., 2018, Aberman et al., 2018,
Liu et al., 2018, Shysheya et al., 2019), is that we do
not carry intermediate geometry or pre-computed
image dataset.
Image-based Rendering. Early work in
image-based rendering focused on render-
ing new viewpoints of static objects and
scenes undergoing rigid transformations, from
a sparse set of images (Debevec et al., 1996,
Levoy and Hanrahan, 1996, Buehler et al., 2001).
The idea of combining view-dependant tex-
ture maps with proxy geometry to interpo-
late sparse viewpoints came as early as 1996
(Debevec et al., 1996, Levoy and Hanrahan, 1996).
For static objects, a proxy shape with scene
texture can efficiently interpolate camera views
(Debevec et al., 1996), while light fields parame-
terize the view space (Levoy and Hanrahan, 1996)
w.r.t. two parallel rectangles. These ideas were
then extended to support unstructured geometries
(Buehler et al., 2001).
In the case of characters and articulated sys-
tems, one needs to interpolate not only views but
also pose. Early work would segment out actors
from video, and re-enact them (Sch
¨
odl et al., 2000,
Sch
¨
odl and Essa, 2002), whilst in the same view. To
Rig-space Neural Rendering: Compressing the Rendering of Characters for Previs, Real-time Animation and High-quality Asset Re-use
301

interpolate new views, (Carranza et al., 2003) intro-
duced a character mesh with view-dependant tex-
ture blending, which was computed from multi-
ple video footage. Subsequent work seek to blend
across poses (Germann et al., 2010, Xu et al., 2011,
Casas et al., 2014, Volino et al., 2014). These meth-
ods employ a proxy mesh whose edges can be per-
ceived and require a heavy memory footprint when
keeping the video data.
In contrast, deep neural networks require much
less memory as they succinctly compresses the pose-
dependant appearance space, and have shown promis-
ing results recent years.
Adversarial Image-to-Image Translation. The
core innovation behind these new methods is the abil-
ity to train a deep generative network in a semi-
supervised manner (without paired correspondences)
using adversarial learning (Goodfellow et al., 2014).
A set of images from one domain can be trans-
lated into a target domain (Isola et al., 2016), such as
the image of a skeleton into the image of a person
(Chan et al., 2018, Aberman et al., 2018).
This approach however is conditioned on flat 2d
skeletons without proper 3d orientation information,
leading to ambiguities between front and back for ex-
ample. As a result, undesirable artefacts may appear
as the limbs and body turn.
The other issue with adversarial learning is
the limitation to a rather low image resolution,
such as 256 × 256. To reach higher resolutions,
(Karras et al., 2017) used an effective progressive
training scheme, in which up-scaling convolutional
blocks are progressively trained, one image resolution
at a time.
Subsequent work seek to reach high quality, high
resolution rendering, but by using paired images pro-
vided by the pre-rendering of proxy geometry.
Image-to-Image Translation with a Proxy
Mesh. To circumvent both the limitation to
low resolution images associated with adversar-
ial learning, and to remove ambiguities due to
flat 2d maps (e.g. 2d skeletons missing 3d sur-
face orientation), methods have utilized paired
images produced by first rendering coarse geom-
etry (Martin-Brualla et al., 2018, Liu et al., 2018,
Thies et al., 2019, Shysheya et al., 2019,
Meshry et al., 2019) and then translating to the
corresponding real-world counter-part.
The rendered geometry allows to condi-
tion the network with less ambiguous data:
UV map (Thies et al., 2019), low resolution
avatar with patterned clothing (Liu et al., 2018),
rendered 3d skeleton (Shysheya et al., 2019),
or noisy captured albedo and normals
(Martin-Brualla et al., 2018, Meshry et al., 2019).
All these methods first render the 3d geometry
and thus require creating and manipulating this
intermediate object in their pipeline. In contrast,
we directly learn from rig parameters, to render
high resolution, free of surface orientation artefacts
images of articulated characters.
Learned Scene Representations and Rendering.
Closest in spirit to our work is the approach of
(Eslami et al., 2018), which introduced the idea of
learning a rendering conditioned on a latent low
dimension scene vector, and camera configuration.
Their work is focused on learning a compact scene
representation from set of low resolution images,
while we are focused on learning from artistically au-
thored rig parameterazations and high resolution ren-
dering of objects undergoing articulation.
A similar and interesting line of work is that of
(Lombardi et al., 2019), which learn a scene repre-
sentation from a set of images via a differentiable vol-
ume ray caster. Their networks turn multiple images
into a latent vector (modeled as a multivariate Gaus-
sian distribution), which is decoded into a volume,
which in turn is rendered via volumetric ray casting.
The volume can be rotated and thereby generalize to
new in-between views and motions. It would be inter-
esting to see if such a volumetric representation could
be learned from rig parameters, or if encoding the
rig parameters into an identically and independently
distributed latent vector (as with variational autoen-
coders) helps generalize better to new movements.
3 DATASET
Our approach requires a full image capture of the
character in different poses and views. We take a 3d
model of the character, together with a pose dataset
defined in rig space q (detailed below), and render
each pose in many different camera views c. Note
that we use the rendering software as is, and automate
the posing and rendering via scripting.
To avoid redundant pose information, we trans-
form rig parameters q into camera space: ˜q = c
−1
q.
As rigs, we experimented with kinematic skeletons
defined as positions and orientations, and produced
all results using only the orientation of joints. We
postulate other traditional rigs such as vertex-based
elements, would be sufficient—insofar they are dense
enough to model the orientation of each limb. Blend
shapes would also work, as long as they are com-
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
302

bined with pose information to account for articula-
tion and viewing.
Our network takes as input rig parameters in view
space ˜q and outputs feature maps I = {I
i
}, such as the
RGB albedo I
a
and occupancy I
m
mask of the char-
acter. To support dynamic lighting and scene compo-
sition with other scene elements, we need additional
feature maps such as normals I
n
and depth I
d
, as de-
scribed in our network extension section 4 and scene
composition section 5. Hence when rendering the
character, the rendered maps I are save together with
the corresponding rig parameters ˜q.
In the event that a rig would be too high dimen-
sional for practical real-time use, we propose to pa-
rameterize a kinematic skeleton (joint positions and
orientaitons) w.r.t. to the high dimensional rig, and to
save the reduced skeleton subspace ˜q instead of the
full rig space. While this parameterization would re-
quire additional work for the setup, it remains less la-
borious than re-creating a full character mesh, rig, and
re-animating each movement.
4 Rig2Image NETWORK
Our network takes the rig parameters ˜q directly as
input, and outputs an image I of the character in
the given rig’s pose. The challenges with designing
such a network are first convergence while learning to
generate high resolution detailed images, and second
to efficiently generate several scene maps I such as
I = {I
a
, I
n
, I
d
, I
m
} albedo, normals, depth, mask, etc.
We first detail how to architect and train a model for
generating a single high resolution image I
a
, and de-
tail in section 4 how to efficiently extend the architec-
ture to multiple maps.
Figure 3: Our Rig2Image architecture for high resolution
images first maps the input rig parameters to a fixed size
(512) latent vector via a fully connected layer. Then through
multiple convolutional blocks the spatial dimensionality is
doubled up to 1024×1024. To converge, we employ a train-
ing curriculum: first we train the backbone for an image res-
olution of 16 × 16, then we train the convolutional blocks
that increase the resolution, one at a time.
To converge at learning high resolution images,
we build upon previous explorations, by using the
progressive training scheme of (Karras et al., 2017),
and adapting the generative network to arbitrary rig
parameters.
We first map the rig parameters ˜q to a fixed sized
feature vector using fully connected layers. Then we
increase the spatial resolution of the features using
multiple convolutional blocks, each doubling the spa-
tial resolution, as shown in Fig. 3.
Training this entire model up to full resolution
from scratch fails to converge, resulting in large arte-
facts such as missing limbs and large holes in the
character. We found empirically that convergence is
best reached by first training the network to a resolu-
tion of 16 × 16, and to then progressively train each
subsequent block, one by one.
As training loss L (I, I
gt
), we minimize the error
(weighted combination of L2 and L1) between the
predicted image I and the ground truth image I
gt
:
L (I, I
gt
) = (1 − α) · L2 (I, I
gt
) + α · L1 (I, I
gt
),
where L1 tends to help increase sharpness slightly,
and α is set to 0.1 in all our experiments.
Training with these losses leads to images that can
remain blurry. To increase details, we experimented
with losses from related work such a saliency loss
(Martin-Brualla et al., 2018) and multi-scale losses
such as the perceptual loss (Johnson et al., 2016). We
obtained marginal increase in detail with these exper-
iments. The multi-scale perceptual loss, which comes
from a pre-trained network on natural images, injects
textures closer to natural images and is thereby bet-
ter suited for organic, photo-realistic images. A per-
ceptual loss generated from a network trained on syn-
thetic images, artistically similar to the character, may
offer a bigger benefit and is left for future experimen-
tation.
Now that we can successfully generate a high res-
olution image from rig parameters, we describe how
to efficiently generate multiple scene maps requires
for scene composition.
4.1 Multi-map Network for Dynamic
Scene Composition
To enable dynamic lighting, as well as dynamic com-
position with other scene objects, our network needs
to be able to generate different feature maps such as
normals I
n
, depth I
d
, mask I
m
, etc., together with the
usual albedo I
a
, in an efficient manner. For example,
training independent networks for each map, signif-
icantly increases training time, and quickly reaches
hardware constraints such as GPU memory. Addi-
tionally, since these feature maps are similar by na-
ture, it is likely that they share deeper representations
that could be more efficiently encoded in a common
network.
In fact, certain feature maps such as depth, nor-
mals and mask are correlated and can be computed
Rig-space Neural Rendering: Compressing the Rendering of Characters for Previs, Real-time Animation and High-quality Asset Re-use
303

Figure 4: To predict feature maps such depth, normals, and mask, which are required for dynamic re-lighting and composition,
we extend the network architecture to two main branches: an image branch for albedo, and a geometric branch for strongly
correlated features such depth, normals and mask. Layers generating features up to 8 × 8 are shared, then split to produce
higher resolutions. As before, we train the backbone part of the network up to 16 × 16 resolution, referred to here as PL1.
Subsequent blocks PLi in each branch progress in parallel, trained one at a time, where the respective output layers (toRGB,
toDepth, toNormals, toMask) are only active at the currently trained resolution.
a) albedo b) normals c) depth d) mask
Figure 5: Example predictions (top) for the different scene
maps and their according ground truth images (bottom).
from one another; e.g. normals can be computed from
depth by computing gradients, and a mask is a sim-
ple binary test from either depth or normals. Hence,
we designed an architecture that shares deep repre-
sentations up to the 8 × 8 features, then branches into
two separate branches: one for albedo and one ded-
icated to geometric information such as depth, nor-
mals and mask, as shown in Fig. 4. As before, we
first train the network to a resolution of 16 × 16, and
then progress in parallel on each branch, dropping the
toRGB, toDepth, toNormals and toMask each time we
move to the next block; up to 1024 × 1024 in our ex-
periments. Fig. 5 shows an example of the predicted
feature maps.
Using the scene maps I
a
, I
n
, I
d
, I
m
, we now de-
scribe how to integrate our learned character render-
ing into existing scenes.
5 SCENE COMPOSITION
At run-time, the application manipulates the rig pa-
rameters, for example by blending poses via a game
controller, or via data from a motion capture system,
as shown in Fig.2. The rig parameters ˜q are then fed
to our network to generate the feature maps I.
One way to use our method is to simply learn a
fully lit character and re-render it in the same views as
it was trained on. However, to be able to compose the
character with other objects in the scene (e.g. moving
in front and behind), produce dynamic lighting, we
need to use our feature maps I = {I
a
, I
n
, I
d
, I
m
} and
compose normals with light sources and depth with
the scene’s depth buffer.
However, to be able to move the character in the
camera frame, we need to transform, or warp the fea-
ture maps as to appear positioned at new locations in
the scene, as well scale the depth values I
d
according
to the displacements.
To create the appearance of being rendered at new
positions, we treat the character as a 3d billboard
moving with the root motion of the 3d character,
while facing the camera. This will automatically take
into account the image-space scale of the character.
Since we trained our model with poses centered at the
camera, we need to take into account off-center view-
ing effects on the pose.
For off-center viewing, we compute the rotation
R between the ray passing through the center point
of the camera, and the ray passing through the center
point of the billboard displaced in the scene. We apply
this rotation to the pose ˜q, resulting in a new pose
ˆq = R ˜q, from which the maps
ˆ
I are predicted.
To scale the depth maps, we compute the scale
s between the image-space billboard dimensions at
run-time and the image-space billboard dimensions
at training time. We then scale the depth values of
ˆ
I
d
with the inverse of s as to increase depth as the
billboard gets smaller, resulting in a new depth map
¯
I
d
= s
−1
ˆ
I
d
. Using the adjusted maps in image space,
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
304

we perform additional pixel-wise operations to com-
pute light intensity using the normals
ˆ
I
n
, and compose
with other objects using depth maps
¯
I
d
.
Dynamic Lighting. To demonstrate dynamic light-
ing effects, we use the normal maps and compose
them with light sources in the scene by computing
Phong shading (Phong, 1975). We sum for each cam-
era, the dot product between the light source point-
ing direction and the normal vector. Examples with
different light colors are shown in the accompanying
video.
Composition with Other Scene Objects. When
other objects move in front of the character, we need
to know which pixels should be replaced by the other
object’s color. We solve this problem with a tradi-
tional depth buffer technique (Catmull, 1974). Most
modern renders produce depth maps when rendering.
Hence we can integrate with other systems via this
depth buffer interface. The final pixel color comes
from the map with nearest depth. Examples of this
composition are shown in the accompanying video.
6 EVALUATION
We first describe the dataset we used for our results
and comparisons. Using this dataset we were able to
train a deep neural network to render articulated fig-
ures at high resolutions (1024 × 1024) directly from
rig parameters. We then evaluate our model on a core
challenge with learned rendering, that is the gener-
alization to new views and new motions. We describe
below evaluations to both, and evaluations of each can
seen in our accompanying video.
Dataset. In each experiment, we used the same
dataset. We trained a model to go from skeleton
rig parameters to the rendered image at resolution
(1024 × 1024). We utilized a motion library com-
prised of 5 minutes of small, but diverse motion clips
sampled at 60 Hz, amounting to 18k frames. We sam-
ple views at a regular interval on a circular disc around
the character. In order to compare generalizabilty to
new views, we trained one model on 6 views, sampled
at 60 degrees intervals, amounting to 108k images and
7 GB of data, and one model on 60 views, amounting
to 1,080k images and 170 GB of data. Note that our
neural network does not change and remains at a con-
stant size of 350 MB.
Figure 6: The 3d rig parameters such as skeleton joint an-
gles are sufficient to learn a disentangled surface map, as
can be seen from front and back facing character.
Figure 7: Example albedo output: prediction (left), ground
truth (middle), and error visualization (right). As can be
seen from the error plot, the system struggles mostly with
high frequency details, such as the fine line of the mouth.
Results on Dataset. We first evaluate the perfor-
mance over the training data. We can see that our net-
work is capable of differentiating between front and
back using the rig parameters, as shown in Fig. 6. The
accompanying video and Fig. 7 show the error be-
tween the predicted image and the ground truth. We
can observe the error being larger for limb extremi-
ties, high frequency details and edges around the char-
acter, as well as poses less represented in the dataset.
For further poses see Fig. 10 or the accompanying
video.
New Views. To evaluate generalizing to new views,
we synthesized 360 view transformations that we ap-
ply to a single pose from our training data. The pose
was previously seen during training, but the combina-
tion of pose and view not. We can see that the model
trained on 6 views exhibits significant non-linear mor-
phing, but that the model trained on 60 views yields
perceptually smooth results. As a reference for com-
parison, we computed a standard linear interpolation
of the 60 views, and one can see in Fig. 8, as well
as in our video that the interpolation remains notice-
ably ghosty. For a quantitative comparison see Fig. 9,
which clearly shows the benefit over the linear inter-
polation.
New Motions. To evaluate generalizability to new
movements, we tested on a separate motion clip that
was not part of the training set. We can see in the
accompanying video how the network might loose a
limb when a significantly different pose is presented.
Note that our first trials included the root position in
the rig, and the network learned correlations specific
to this value. Hence generalization was very poor,
which led us to learn only from orientations. Hence
Rig-space Neural Rendering: Compressing the Rendering of Characters for Previs, Real-time Animation and High-quality Asset Re-use
305

Figure 8: Comparison of results for novel view points: a)
our model trained on 6 views, b) our model trained on 60
views, and c) linear interpolation (60 views dataset).
a rule of thumb is to avoid absolute world or frame-
relative rig coordinates.
One way we believe could improve generalizibilty
to new motions is to train on more diverse poses, in-
stead of continuous motion clips. While our move-
ments are diverse, the individual poses close to one
another as a result of being continuous movement
clips, which is easier for the network to encode, then
poses that would be further.
Figure 9: Quantitative error for the learned rendering over
new views in blue, and linear interpolation in red. Both
lines reflect the mean over 140 poses and the shaded region
the standard deviation. The learned model was trained on 6
views, hence the testing interval of 60
◦
.
Architecture. We experimented with alternative ar-
chitectures. In section 4.1, we introduce a multi-
branch network for albedo, normals, depth and mask
that shares deep layers and features. We experimented
with a single branch, but this resulted in fighting be-
tween feature maps; albedo would look like normals,
or vice versa.
Many works utilize skip connections to help ker-
nels operating on the high resolution features recover
localized structures. We tried adding skip connections
from the rig parameters to further layers, but this did
result in additional details. We believe that a differ-
entiable splatting of the rig into an image, combined
with skip connections could improve the rendering
details.
Figure 10: Results of our generated images from rig param-
eters. The top row shows the generated image, while the
bottom row shows ground truth. We picked poses to illus-
trate the various motion clips we trained with. They include
stretching movements, cartwheel rolls and yoga poses.
7 LIMITATIONS AND FUTURE
WORK
In this work, we demonstrate for the first time a
learned character rendering generated directly from
the rig parameters at high resolution (1024 × 1024).
Unlike human faces, articulated figures undergo large
deformations in image space and require powerful
models to represent compactly. While we have made
a step forward in this direction, our rendered images
remain blurry and could be improved with additional
details.
When presenting our network with new poses,
never seen before, we can sometimes see a limb fad-
ing, or morphing artefacts. One way to improve this
could be to craft a more diverse dataset, and chal-
lenge the network a bit more during training–instead
of showing continuous motion clips with each pose
being similar to one another. An alternative could
be to employ a differentiable splatting function that
would draw a character structure from the rig param-
eters, which could help the kernels improve the ren-
dering locally on the body parts.
8 CONCLUSION
We were able, for the first time, to render an artic-
ulated character using a learned model operating di-
rectly on its animation rig parameters. Our approach
is fully automated and can take a high resolution asset
rendered in its environment and re-render it in real-
time with a deep neural network running on a GPU.
This now opens up new possibilities for live rig-space
previs and exciting research opportunities in real-time
rendering. For example, it would be interesting to
learn representations that can be shared across simi-
lar characters. Or another line of work is stylization,
GRAPP 2021 - 16th International Conference on Computer Graphics Theory and Applications
306

and real-time blending of digital characters into real
world videos.
REFERENCES
Aberman, K., Shi, M., Liao, J., Lischinski, D., Chen, B.,
and Cohen-Or, D. (2018). Deep video-based perfor-
mance cloning.
Buehler, C., Bosse, M., McMillan, L., Gortler, S., and
Cohen, M. (2001). Unstructured lumigraph render-
ing. In Proceedings of the 28th Annual Conference on
Computer Graphics and Interactive Techniques, SIG-
GRAPH ’01, pages 425–432, New York, NY, USA.
ACM.
Carranza, J., Theobalt, C., Magnor, M. A., and Seidel, H.-
P. (2003). Free-viewpoint video of human actors.
In ACM SIGGRAPH 2003 Papers, SIGGRAPH ’03,
pages 569–577, New York, NY, USA. ACM.
Casas, D., Volino, M., Collomosse, J. P., and Hilton, A.
(2014). 4d video textures for interactive character ap-
pearance. Comput. Graph. Forum, 33:371–380.
Catmull, E. E. (1974). A Subdivision Algorithm for
Computer Display of Curved Surfaces. PhD thesis.
AAI7504786.
Chan, C., Ginosar, S., Zhou, T., and Efros, A. A. (2018).
Everybody dance now.
Debevec, P. E., Taylor, C. J., and Malik, J. (1996). Mod-
eling and rendering architecture from photographs: A
hybrid geometry- and image-based approach. In Pro-
ceedings of the 23rd Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’96, pages 11–20, New York, NY, USA. ACM.
Eslami, S. M. A., Jimenez Rezende, D., Besse, F., Vi-
ola, F., Morcos, A. S., Garnelo, M., Ruderman, A.,
Rusu, A. A., Danihelka, I., Gregor, K., Reichert,
D. P., Buesing, L., Weber, T., Vinyals, O., Rosenbaum,
D., Rabinowitz, N., King, H., Hillier, C., Botvinick,
M., Wierstra, D., Kavukcuoglu, K., and Hassabis, D.
(2018). Neural scene representation and rendering.
Science, 360(6394):1204–1210.
Germann, M., Sorkine-Hornung, A., Keiser, R., Ziegler, R.,
W
¨
urmlin, S., and Gross, M. H. (2010). Articulated
billboards for video-based rendering. Comput. Graph.
Forum, 29:585–594.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Ghahra-
mani, Z., Welling, M., Cortes, C., Lawrence, N. D.,
and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 27, pages 2672–
2680. Curran Associates, Inc.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2016).
Image-to-image translation with conditional adversar-
ial networks. arxiv.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Perceptual
losses for real-time style transfer and super-resolution.
In European Conference on Computer Vision.
Karras, T., Aila, T., Laine, S., and Lehtinen, J. (2017). Pro-
gressive growing of gans for improved quality, stabil-
ity, and variation. CoRR, abs/1710.10196.
Levoy, M. and Hanrahan, P. (1996). Light field render-
ing. In Proceedings of the 23rd Annual Conference on
Computer Graphics and Interactive Techniques, SIG-
GRAPH ’96, page 31–42, New York, NY, USA. As-
sociation for Computing Machinery.
Liu, L., Xu, W., Zollhoefer, M., Kim, H., Bernard, F.,
Habermann, M., Wang, W., and Theobalt, C. (2018).
Neural rendering and reenactment of human actor
videos.
Lombardi, S., Simon, T., Saragih, J. M., Schwartz, G.,
Lehrmann, A. M., and Sheikh, Y. (2019). Neural
volumes: Learning dynamic renderable volumes from
images. CoRR, abs/1906.07751.
Martin-Brualla, R., Pandey, R., Yang, S., Pidlypenskyi,
P., Taylor, J., Valentin, J. P. C., Khamis, S., David-
son, P. L., Tkach, A., Lincoln, P., Kowdle, A., Rhe-
mann, C., Goldman, D. B., Keskin, C., Seitz, S. M.,
Izadi, S., and Fanello, S. R. (2018). Lookingood: En-
hancing performance capture with real-time neural re-
rendering. CoRR, abs/1811.05029.
Meshry, M., Goldman, D. B., Khamis, S., Hoppe, H.,
Pandey, R., Snavely, N., and Martin-Brualla, R.
(2019). Neural rerendering in the wild. CoRR,
abs/1904.04290.
Phong, B. T. (1975). Illumination for computer generated
pictures. Commun. ACM, 18(6):311–317.
Sch
¨
odl, A. and Essa, I. A. (2002). Controlled animation of
video sprites. In Proceedings of the 2002 ACM SIG-
GRAPH/Eurographics Symposium on Computer An-
imation, SCA ’02, page 121–127, New York, NY,
USA. Association for Computing Machinery.
Sch
¨
odl, A., Szeliski, R., Salesin, D. H., and Essa, I. (2000).
Video textures. In Proceedings of the 27th Annual
Conference on Computer Graphics and Interactive
Techniques, SIGGRAPH ’00, page 489–498, USA.
ACM Press/Addison-Wesley Publishing Co.
Shysheya, A., Zakharov, E., Aliev, K.-A., Bashirov, R.,
Burkov, E., Iskakov, K., Ivakhnenko, A., Malkov, Y.,
Pasechnik, I., Ulyanov, D., Vakhitov, A., and Lempit-
sky, V. (2019). Textured neural avatars.
Thies, J., Zollh
¨
ofer, M., and Nießner, M. (2019). Deferred
neural rendering: Image synthesis using neural tex-
tures.
Volino, M., Casas, D., Collomosse, J., and Hilton, A.
(2014). Optimal representation of multiple view
video. In Proceedings of the British Machine Vision
Conference. BMVA Press.
Xu, F., Liu, Y., Stoll, C., Tompkin, J., Bharaj, G., Dai,
Q., Seidel, H.-P., Kautz, J., and Theobalt, C. (2011).
Video-based characters: Creating new human perfor-
mances from a multi-view video database. In ACM
SIGGRAPH 2011 Papers, SIGGRAPH ’11, pages
32:1–32:10, New York, NY, USA. ACM.
Rig-space Neural Rendering: Compressing the Rendering of Characters for Previs, Real-time Animation and High-quality Asset Re-use
307
