
Roughness Index and Roughness Distance for Benchmarking Medical
Segmentation
Vidhiwar Singh Rathour, Kashu Yamakazi and T. Hoang Ngan Le
Department of Computer Science and Computer Engineering, University of Arkansas, Fayetteville, Arkansas 72701, U.S.A.
Keywords:
Surface Analysis, Roughness Distance, Irregular Spikes/Holes, Medical Imaging, Medical Segmentation,
Volumetric Segmentation.
Abstract:
Medical image segmentation is one of the most challenging tasks in medical image analysis and has been
widely developed for many clinical applications. Most of the existing metrics have been first designed for
natural images and then extended to medical images. While object surface plays an important role in medical
segmentation and quantitative analysis i.e. analyze brain tumor surface, measure gray matter volume, most
of the existing metrics are limited when it comes to analyzing the object surface, especially to tell about
surface smoothness or roughness of a given volumetric object or to analyze the topological errors. In this
paper, we first analysis both pros and cons of all existing medical image segmentation metrics, specially
on volumetric data. We then propose an appropriate roughness index and roughness distance for medical
image segmentation analysis and evaluation. Our proposed method addresses two kinds of segmentation
errors, i.e. (i) topological errors on boundary/surface and (ii) irregularities on the boundary/surface. The
contribution of this work is four-fold: (i) detect irregular spikes/holes on a surface, (ii) propose roughness index
to measure surface roughness of a given object, (iii) propose a roughness distance to measure the distance of
two boundaries/surfaces by utilizing the proposed roughness index and (iv) suggest an algorithm which helps
to remove the irregular spikes/holes to smooth the surface. Our proposed roughness index and roughness
distance are built upon the solid surface roughness parameter which has been successfully developed in the
civil engineering.
1 INTRODUCTION
In this paper we first discuss the pros and cons of vari-
ous metrics that have been commonly used for bench-
marking the medical image segmentation task. We
emphasize on the limitations of existing metrics, such
as Hausdorff distance when evaluating the volumetric
segmentation. Our study shows that the existing vol-
umetric metrics are unable to measure the topologi-
cal errors specially when irregular spikes/holes are on
the surface. We then propose (i) an algorithm that
helps to detect irregular spikes/holes that exist on a
given object surface; (ii) a roughness index that de-
scribes how rough an object is given an object’s sur-
face; (iii) a roughness distance that aims at compar-
ing the surfaces between two given objects; (iv) an al-
gorithm that aims at removing the small outliers and
the irregular spikes/holes to smooth the surface. As
compared to other volumetric segmentation metrics
i.e. Hausdorff distance, our proposed roughness dis-
tance is able to measure the topological error whereas
roughness index evaluates the surface roughness. Fur-
thermore, we conduct the experiment to show that our
proposed irregular spikes/holes detection and surface
smoothing can be applied as a post-processing step
in any image segmentation algorithm to improve the
accuracy.
2 DESCRIPTION OF PURPOSE
Medical image segmentation is an important research
topic in medical analysis and has attracted attention in
past couple of years. With the abundance of medical
data available it has become easier to perform seg-
mentation task. However, evaluation and validation
of medical segmentation, specially volumetric data is
still a major concern because majority evaluation met-
rics have been developed as piece-wise setting for 2D
natural images and then extended to medical images
including volumetric data. As categorized in (Shi
et al., 2013), there are four types of segmentation er-
rors i.e. quantitative or the number of objects, area of
82
Rathour, V., Yamakazi, K. and Le, T.
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation.
DOI: 10.5220/0010335500820093
In Proceedings of the 14th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2021) - Volume 2: BIOIMAGING, pages 82-93
ISBN: 978-989-758-490-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
segmentation, contour or the object boundary, and the
presence of holes, or irregularities in the boundary of
segmentation. The first type of error, which regards
the number of objects, can be mitigated by increas-
ing the training data. Most of the common evaluation
metrics (i.e. Dice score , Sensitivity, Specificity, etc)
have focused to solve the second type of error, i.e.
area of segmentation which is a well-known problem
in any segmentation task in both computer vision and
medical analysis. For the third type of error, i.e. ob-
ject contour/boundary error, there are a limited num-
ber of metrics that have been developed. Hausdorff
distance (HDD) and Average Symmetric Surface Dif-
ference (ASSD) (Gerig et al., 2001) are the ones that
have been used for calculating errors on object sur-
face. The last error, which is related to topological
errors such as holes and spikes, still remains as a chal-
lenging problem in medical analysis. Several attempts
such as (Joshi et al., 2007) (Li et al., 2006) (Wu and
Chen, 2002) has focused on the last error category by
considering the smoothness and roughness criteria. In
this work, we address the last two kinds of errors,
i.e. (i) topological error on boundary/surface and
(ii) irregularities on boundary/surface as demon-
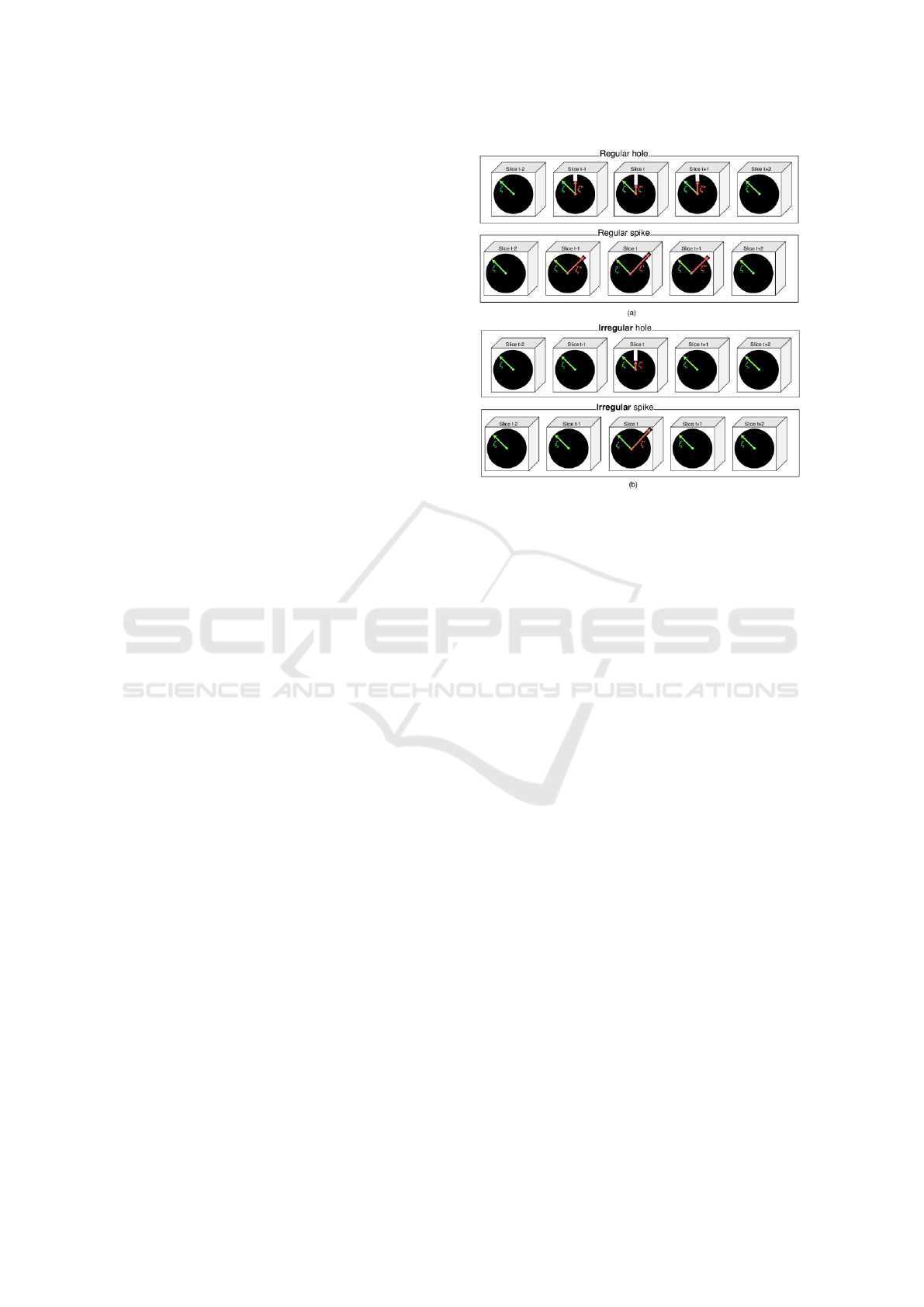
strated in Fig:1.
Different from 2D objects, volumetric objects
need the consistency and continuous between slides.
A comparison between consistency-inconsistency and
regularity-irregularity in volumetric data is given in
Fig:1 where each slide is presented in a cuboid (one
volumetric is considered as a set of slices) and ζ is
the distance between the surface and center of grav-
ity. The inconsistency or irregularity is defined as
an abrupt or a sudden spike/hole. In Fig:1, the reg-
ular spike/hole is given in the top (Fig:1.a) where
spike or hole is gradually formed from slice to slice
whereas the irregular spike/hole is given in the bot-
tom (Fig:1.b) where spike or hole suddenly appeared.
Different from the previous works (Joshi et al.,
2007) (Li et al., 2006) (Wu and Chen, 2002) which
use geometric graph i.e., minimum s-t cut, we make
use of solid surface roughness parameter in civil
engineering to propose roughness metric (Chang
et al., 2006) (Tonietto et al., 2019) (Gadelmawla et al.,
2002). Our contribution can be summarized as fol-
lows:
• Revise and analyze the existing segmentation
metrics that have been used in medical analysis
(Sec:3).
• Propose an algorithm which helps to detect
all irregular spikes/holes on the object surface
(Sec:4.1).
• Introduce a roughness index that measures the
surface roughness given an object in (Sec:4.2).
Figure 1: An illustration of a regular spike/hole (a) v.s an
irregular spike/hole (b).
Our proposed roughness index is based on the
solid surface roughness parameter that has been
successfully developed in the civil engineering
(Chang et al., 2006) (Tonietto et al., 2019) (Gadel-
mawla et al., 2002).
• Propose a roughness distance metrics which
computes the surface distance between two sur-
faces (Sec:4.3).
• Propose an algorithm which helps to remove the
irregular spikes/holes and to smooth the contour
(Sec:4.4).
3 RELATED WORK
In this section, we will revise all existing segmenta-
tion metrics that have been commonly used in medi-
cal analysis. We first categorize the existing segmen-
tation metrics into two groups, namely, region-based
metrics and boundary-based metrics. We then anal-
yse the pros and cons of each metric in the following
subsections.
3.1 Region-based Metrics
By definition, region-based metrics are used to
evaluate the area occupied by the segmentation. The
region-based metrics, which are based on pixel-wise,
have been first developed for spatial images (2D)
segmentation in computer vision in general and then
extended to volumetric (3D) segmentation in medical
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
83

imaging. These types of metrics tend to work well
when there is clear demarcation with respect to data
and when the contour is smooth. However they tend
to fail when the the data has holes or boundary is
irregular. These metrics tend to evaluate the second
type of segmentation error, i.e. area of segmentation.
The following is some common region based metrics
that are popularly used volumetric segmentation.
Segmentation Problem Setting: In the image seg-
mentation problem, evaluation process is performed
between the ground-truth G created by the human and
segmentation predicted P by some algorithmic model.
Dice Similarity Coefficient (DSC): Initially intro-
duced as Dice (Dice, 1945) also known as the F1
score is one of the most commonly used metrics
in validating medical image segmentation (Linguraru
et al., 2012) (Linguraru et al., 2009) in both spa-
tial images and volumetric data. Lets consider P as
the predicted volumetric segmentation vector and G
as the ground-truth, then DSC can be calculated as
shown in Eq:1.
DSC =
2|P ∩ G|
|P| + |G|
(1)
Symmetric Volume Difference (SVD): introduced
by (Campadelli et al., 2009) and Jaccard Similarity
Coefficient (JSC) introduced by (Liu et al., 2012) are
similar to DSC and can be mathematically computed
from DSC as shown in Eq:2 and Eq:3.
SVD = 1 − DSC (2)
JSC =
|P ∩ G|
|P ∪ G|
=
DSC
2 − DSC
(3)
DSC although works well with data that is clearly de-
marcated, yet it tends to produce unwanted results if
the segmentation boundary is ambiguous. Also DSC
cannot tell anything about the boundary information,
roughness and smoothness of a volumetric surface or
the topological error on the boundary surface. JSC
and SVD have the same inherent problems as DSC.
Precision (Pre), Recall (Rec) and Sensitivity
(Sens): Precision is defined as the volume of correctly
segmented volume to the total volume that has been
segmented. Recall (also referred to as Sensitivity) is
the the ratio of correctly segmented volume over the
ground-truth.
Pre =
|P ∩ G|
|P|
(4)
Rec/Sens =
|P ∩ G|
|G|
(5)
Precision takes into account only the volume that
has been segmented correctly but does not consider
the under-segmented volume. Recall on the other
hand does not consider the over-segmented volume.
However these two metrics are extensively being
used in computer vision for segregation tasks (Wolz
et al., 2012) (Campadelli et al., 2010).
Specificity (Spec): Specificity also referred to as
Selectivity is the ratio of portion of total volume
that is not common to the ground-truth (G) and pre-
dicted segmentation (P) by the portion not included
in ground-truth (G). True Negative (TN) is the por-
tion of volume that is not common to the ground-truth
(G) and predicted segmentation (P) and False Positive
(FP) is the potion of volume belonging to predicted
segmentation (P) that is not common to ground-truth
(G):
Specificity(Spec) =
|(P ∪ G)
C
|
|G
C
|
(6)
Here C denotes the compliment component which is
illustrated in Fig:2. The segmented volumetric S con-
tains two parts corresponding to foreground F and
background G, where G = F
C
𝒮
=
∪
ℱ
𝒢 = ℱ
C
Figure 2: An Illustration of compliment using in Eq:6.
Green cuboid F represents the set for which compliment
is being calculated, and Black cuboid S represents the uni-
versal set of which F is a part.
Relative Volume Difference (RVD): RVD is de-
fined as the ratio of absolute difference in volume
between the predicted volumetric segmentation vec-
tor (P) and the ground-truth (G) to the ground-truth
(G). It is commonly used as a reference to other met-
rics(Heimann et al., 2009) (Linguraru et al., 2012).
RVD = |
|P| − |G|
|G|
| (7)
RVD computed the relative difference in volume be-
tween predicted volumetric segmentation vector (P)
and the ground-truth (G) and hence it does not take
into consideration the overlap between them.
3.2 Boundary-based Metrics
Different from region-based metrics, which are de-
signed to work on entire area, boundary-based metrics
focus on boundary or surface only. In this section, we
BIOIMAGING 2021 - 8th International Conference on Bioimaging
84
revise two common boundary-based metrics, namely,
Average Symmetric Surface Difference (ASSD) and
Hausdorff Distance (HDD) as follows:
Hausdorff Distance (HDD): Hausdorff distance
(HDD) is defined as the maximum possible distance
from a point/voxel on one boundary/surface to the
corresponding closest point/voxel on another bound-
ary/surface (Gerig et al., 2001) (Chen et al., 2012b)
(Liu et al., 2012) (Chen et al., 2012a). The HDD be-
tween the ground-truth boundary/surface ∂G and the
predicted segmentation boundary/surface ∂P is de-
fined as follows:
HDD = max
x∈∂G
((|x,∂P|
L2
)) (8)
where |x,∂P|
L2
is the shortest L
2
distance between
a point/voxel x on the ground-truth boundary/surface
∂G and the predicted segmentation boundary/surface
∂P, namely, |x,∂P|
L2
= min
y∈∂P
||(x − y)||
2
. Thus,
Eq.9 is rewritten as:
HDD = max
x∈∂G
((|x,∂P|
L2
)) = max
x∈∂G
((min
y∈∂P
||x − y||
2
))
(9)
Because both P and G are symmetric, the bidi-
rectional Hausdorff distance between ground-truth
boundary/surface ∂G and the predicted segmentation
boundary/surface ∂P is computed as:
HDD = max (max
x∈∂G
((|x,∂P|
L2
)),(max
x∈∂P
((|y,∂G|
L2
))
(10)
Hausdorff distance, which is computed as the max-
imum distance between two surface, has been com-
monly used in practice. HDD only tells about the
maximum possible distance. However, it is unable to
describe the surface roughness as well as detect topo-
logical errors which are critical problems in medical
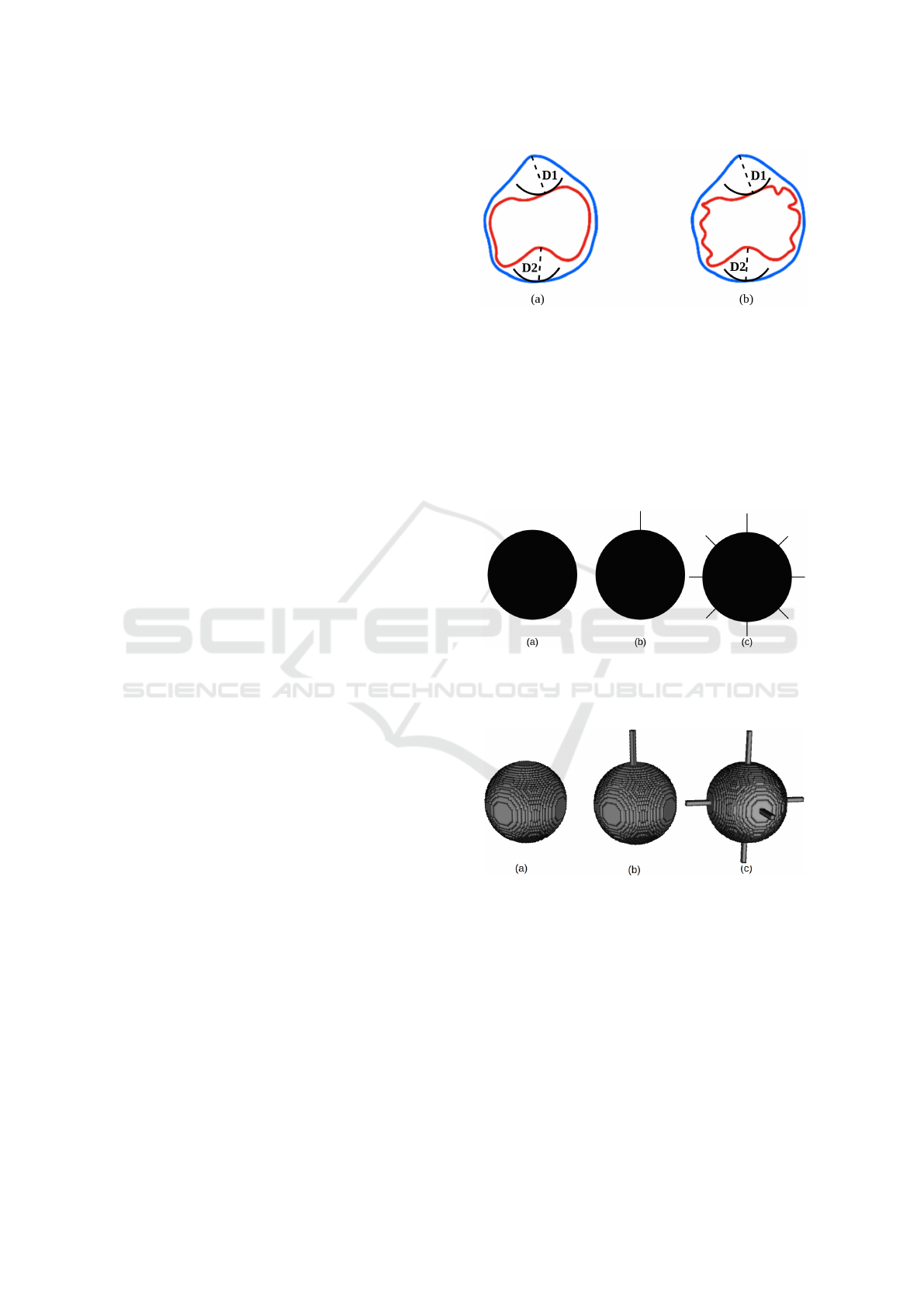
imaging. Fig:3 illustrates some limitations of HDD.
In this figure, suppose the ground-truth boundary G
is presented in blue curve whereas the predicted seg-
mentation P is shown in red curve. Two cases are
considered in this example, namely, smooth predicted
segmentation (Fig:3(a)) and rough predicted segmen-
tation (Fig:3(b)) with some topological errors on the
predicted segmentation boundary. Let denote D
1
and
D
2
as the distance between G and P, i.e. D
1
=
max
x∈∂G
((|x,∂P|
L2
) and the distance between P and
G, i.e. D
2
= max
x∈∂P
((|y,∂G|
L2
). As shown in Fig:3,
the distance D
1
and D
2
are the same in two cases,
thus the HDD is unchanged, i.e. HDD = max(D
1
,D
2
)
even the predicted boundary in Fig:3(b) is different
from the one in Fig:3(a). Compared to the predicted
boundary in Fig:3(a), the one in Fig:3(b) is rougher
and with more topological changes.
Fig:4, 5 further explains the limitations of HDD.
In this example, the ground-truth is given in Fig:4, 5
Figure 3: Illustration of HDD in two cases: smooth pre-
dicted boundary (a) and rough predicted boundary with
topological changes (b). Blue curve is ground-truth bound-
ary G and red curve is predicted segmentation boundary P.
D
1
is distance from G to P and D
2
is distance from P to G.
(a) and Fig:4, 5 (b) and (c) are two different predicted
segmenting results. As shown in Fig:4, 5, there are
little irregular spikes on (b) and many irregular spikes
on (c), however, the HDD between the ground-truth
and the predicted segmenting results are the same.
Figure 4: From left to right 2D (a): ground-truth; (b) pre-
dicted segmentation with little irregular spikes; (c) pre-
dicted segmentation with many irregular spikes.
Figure 5: From left to right 3D (a): ground-truth; (b) pre-
dicted segmentation with little irregular spikes; (c) pre-
dicted segmentation with many irregular spikes.
Average Symmetric Surface Difference (ASSD):
ASSD (Chen et al., 2012b) (Chen et al., 2012a)
(Yokota et al., 2013) is the average of all the distances
from points/voxels on the boundary/surface of the
ground-truth mask to the boundary/surface of the
predicted segmentation mask, and vice versa. Denote
P and G as the predicted segmentation mask and the
ground-truth mask. The boundary/surface of P and
G are then defined as ∂P and ∂G. Mathematically,
ASSD is computed as follows:
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
85

Table 1: Summary of existing metrics on volumetric segmentation:- Red : Predicted Segmentation(P), Blue: ground-truth(G),
Purple: True Positive(TP), ’C’ in the subscript suggests the compliment of the vector the image description is shown in Fig 6.
Type Metrics Equation Visualization
Region-Based
DSC
2|P∩G|
|P|+|G|
PREC
|P∩G|
|P|
JSC
|P∩G|
|P∪G|
=
DSC
2−DSC
REC, SES
|P∩G|
|G|
SET
|P∪G|
C
|G|
C
RVD |
|P|−|G|
|G|
|
Contour Based HDD max(max
x∈∂G
((|x,∂P|
L2
)),(max
x∈∂P
((|y,∂G|
L2
))
ASSD
∑
x∈∂G
(|x,∂P|
L2
)+
∑
x∈∂P
(|x,∂G|
L2
)
|∂G|+|∂P|
ASSD =
∑
x∈∂G
(|x,∂P|
L2
) +
∑
x∈∂P
(|x,∂G|
L2
)
|∂G| + |∂P|
(11)
ASSD is a good metrics for cross distance compu-
tation between boundaries of two surfaces however
ASSD has the same limitations as HDD that it cannot
compute the roughness or smoothness on one partic-
ular surface.
The existing metrics can be summarized in Table
I where the visualization is further explain in Fig.6.
4 PROPOSED METRICS
In this section, our proposed metrics for surface
roughness analysis in medical segmentation will be
Figure 6: Explanation of annotations & visualization that
are used in table 1.
detailed. Our proposed roughness index and rough-
ness distance is based on the real world average
roughness parameter(Tonietto et al., 2019) as de-
BIOIMAGING 2021 - 8th International Conference on Bioimaging
86

scribed in Sec:4.1. In civil engineering domain,
roughness parameter of a particular surface is calcu-
lated using a laser to map the irregularities on the sur-
face (Tonietto et al., 2019). All the symbols and nota-
tions used to describe the proposed metrics have been
summarized in Table:2.
4.1 Irregular Spike/Hole Detection
Roughness is a very important parameter that is fre-
quently used in civil engineering domain (Chang
et al., 2006) (Tonietto et al., 2019) (Gadelmawla et al.,
2002). Civil engineers use the roughness parameter
to measure the inconsistencies on a particular sur-
face such as a slab of concrete or metal. A surface
profile gauge or a Digital Holographic Microscope is
used to map the fluctuations on the surface (Tonietto
et al., 2019). The roughness parameter(Tonietto et al.,
2019) in civil engineering domain is defined in Eq:12
and illustrated in Fig:9a , where ζ
i
is the perpendicular
distance of a point from the laser plane also referred
to as the height coordinate (Tonietto et al., 2019) is
calculated using a laser moving on a fixed plane par-
allel to the object surface and N is the total number of
points where height coordinate is calculated.
RoughnessParameter =
1
N
N
∑
i
|ζ
i
| (12)
We extended the term height coordinate to use it
in 2D and 3D domain by calculating the distance of
the surface point from the center of gravity C
0
instead
of a plain, as illustrated in Fig: 9c for a closed con-
tour laser plain can be approximated as the center of
gravity. We have defined ζ (Zeta) as the distance of
a surface point for a contour P
Sur f ace
from center of
gravity C
0
as shown in Eq:13. Here P
Sur f ace
is the ma-
trix that has value 1 or 0 based on whether the location
in the segmentation mask P belongs to the surface or
not respectively.
ζ
ijk
=
(
|(i, j,k),C
0
|
L2
P
Sur f ace
(i, j,k) = 1
0 Otherwise
(13)
For roughness in 2D and 3D we use a Distance
Matrix ζ
m
that contains the distance of each corre-
sponding surface point from the center of gravity C
0
as shown in Eq:14. This matrix can be used to detect
and correct surface roughness. The main purpose of
calculating ζ is to track the variations in surface. As
illustrated in Fig:1 an irregular hole/spike is marked
by an abrupt change in ζ while for a regular hole/spike
change in ζ takes place gradually.
ζ
m
(i,j,k) = ζ
i jk
(14)
Figure 7: Illustration of how neighbors of a reference point
D0 are considered for 2D (a) and 3D (b) Distance matrix
ζ
m
. In the given figure D0 is a position in distance matrix
ζ
m
, that belongs to the contour and for which roughness ∆ζ
needs to be calculated.
To detect roughness we define Roughness Matrix
∆ζ
m
containing roughness value ∆ζ (Delta zeta) for
each surface location as shown in Eq:17. Roughness
∆ζ of a location on surface can be defined as the sum
of differences between ζ and its contour neighbors
ζ
Neighbors
, belonging to the set of neighbors S
ζ
Neighbors
illustrated in Fig:7 and described in Eq:15 and Eq:16.
∆ζ
ijk
=
∑
(ζ
i jk
− ζ
Neighbors
) (15)
ζ
Neighbors
∈ S
ζ
Neighbors
(16)
∆ζ
m
(i,j,k) = ∆ζ
i jk
(17)
lets consider a 2D example for various cases of
roughness as shown in Fig:8.
• Case 1: shows the condition of a plain where the
neighbors are at the same distance from C
0
as the
point for which ∆ζ needs to be calculated, so ∆ζ
will be ((D − D) + (D − D)) = 0
• Case 2: shows a slope where ∆ζ will be ((D −
D)+ (D −D) + (D −(D + 1))+ (D −(D − 1))) =
0.
• Case 3: is an example of hole where ∆ζ will be
((D − D) + (D − D) + (D − (D + 1)) + (D − (D +
1))) = 2
• Case 4: which is a spike where ∆ζ will be ((D −
D) + (D − D) + (D − (D + 1))) = 1
Hence it can be easily concluded that |∆ζ| for a
location close to zero will denote a smooth surface
and greater then zero will refer to rough surface.
4.2 Roughness Metrics
Roughness parameter is a term usually used to deter-
mine the roughness of a solid surfaces(Chang et al.,
2006) (Tonietto et al., 2019) (Gadelmawla et al.,
2002). We extended this term to use in 2D and 3D sur-
face vector domain. As shown in Eq:18 The Rough-
ness Index (RI) in 3D can be calculated by dividing
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
87

Table 2: Symbols along with their descriptions.
Symbol Description Symbol Description
P Predicted segmentation mask G ground-truth segmentation mask
C
0
Center of gravity of a contour ∂S
w
Segment of an array S with a fixed window size w
ζ ζ
i
ζ
i j
ζ
i jk
Distance of a contour position (i,j,k) from C
0
ζ
m
Distance matrix, ζ
m
(i, j,k) = ζ
i jk
ζ
Neighbor
Distance ζ of neighbor S
ζ
Neighbor
set of neighboring ζ
Neighbor
of ζ
∆ζ ∆ζ
i
∆ζ
i j
∆ζ
i jk
Roughness at a matrix position (i,j,k)
ˆ
ζ Difference between ζ for P and G
∆ζ
m
matrix of ∆ζ ∆ζ
Bm
Rough Boolean matrix, where ∆ζ
Bm
∈ (0,1)
Figure 8: Different cases of roughness when dealing with
2D segmentation mask, In the figure ζ is the corresponding
distance of contour point from center of gravity C
0
.
the segmentation surface S into small surface element
∂S
w
of a fixed window size w, and then calculating
the average deviation of ζ from the mean ζ
Mean
for
all surface voxels in the surface element ∂S
w
as illus-
trated in Fig:9b. In Eq:18 ∂S
w
i
denotes a point on the
surface element ∂S
w
, M is the total no of surface ele-
ments ∂S
w
that the contour surface is divided into and
N is the total no of points i inside each surface element
that belong to the contour surface, Here |∂S
w
i
,C
0
|
L2
is
equal to ζ that we calculated in previous section.
RI =
1
M
M
∑
∂S
w
∈S
1
N
N
∑
i
|(|∂S
w
i
,C
0
|
L2
) − Mean(|∂S
w
i
,C
0
|
L2
)|
(18)
Roughness is a relative quantity. An object that is
rough as compared to one surface may be smooth as
compared to other. Hence it can be difficult to tell
about the roughness of a surface unless we have a
baseline to compare the roughness index. Hence we
introduce Roughness Ratio (RR) that tells about the
relative difference between roughness of two objects.
The roughness ratio has been defined in Eq: 19 where
R I
P
and R I
G
are the roughness index of predicted
segmentation and ground-truth respectively.
RR =
|RI
P
− RI
G
|
RI
G
(19)
(a) In civil engineering domain Roughness is calculated by
moving a laser parallel to the surface to find height coordi-
nate ζ and then using it to find the roughness parameter of
the surface using Eq:12.
Surface Element
Center of gravity C0
(b) In medical domain the segmentation mask is a closed
object as opposed to a flat surface in civil engineering,
hence we calculate the distance of object surface ζ from
center of gravity instead of a plane. This ζ is used to calcu-
late roughness index and surface/roughness distance.
(c) Laser plane can be approximated to center of gravity if
the surface is rolled into a closed contour.
Figure 9: Illustration of how to compute roughness (a):
Roughness parameter is calculated by moving laser on
fixed plane paralleled to the surface, (b): Roughness index
and surface/roughness distance is calculate from an origin
which is defined as the center of medical image and (c):
How the method of calculating roughness can be extended
to medical imaging domain.
BIOIMAGING 2021 - 8th International Conference on Bioimaging
88

4.3 Roughness Distance
In this section, we propose Roughness Distance
which is considered as surface distance between two
surfaces. Let denote
ˆ
ζ as the difference between the
ζ for predicted segmentation (ζ
P
) and ground-truth
segmentation (ζ
G
) as shown in Eq:20 and Roughness
Distance Matrix
ˆ
ζ
m
as the matrix containing
ˆ
ζ values
as shown in equation Eq:21
ˆ
ζ
ijk
= ζ
P
i jk
− ζ
G
i jk
(20)
ˆ
ζ
m
(i,j,k) =
ˆ
ζ
i jk
(21)
Simply speaking roughness distance matrix
ˆ
ζ
m
can be calculated by subtracting distance matrix for
ground-truth segmentation ζ
mG
from distance matrix
for predicted segmentation ζ
mP
as shown in equation
Eq:22. Roughness distance can be used to calculate
the roughness change between two object, ground-
truth and predicted segmentation in our case.
ˆ
ζ
m
= ζ
mP
− ζ
mG
(22)
We also propose Average Roughness Distance
(ARD) which as the name suggest is the average
surface/roughness distance between two objects as
shown in Eq:23. ARD is a metric that tells us about
the average difference between the surface of two ob-
jects. ARD can be used as a substitute of HDD to
compare roughness.
ARD = Mean(|
ˆ
ζ
m
|) (23)
4.4 Surface Smoothing
In this section we will propose a method for smooth-
ing a contour that has roughness on its surface.
Smooth contour can be obtained by using either
of the two methods which include using roughness
matrix ∆ζ
m
or roughness distance matrix
ˆ
ζ
m
that
were calculated in previous sections.
For contour smoothing rough boolean matrix
∆ζ
Bm
is used where the value can be one or zero
based on whether the position is considered as rough
or smooth respectively as shown in Eq:24 where
κ is the threshold roughness value in range of (0 ,
max(∆ζ
m
)).
∆ζ
Bm(i,j,k)
=
(
1, |∆ζ
i jk
| > κ
0, Otherwise
(24)
Similarly ∆ζ
Bm
can also be computed using the
roughness distance matrix
ˆ
ζ
m
as shown in Eq:25
where κ
c
is the threshold distance in range of (0 ,
max(
ˆ
ζ
m
)).
∆ζ
Bm(i,j,k)
=
(
1, |
ˆ
ζ
i jk
| > κ
c
0, Otherwise
(25)
This rough boolean matrix ∆ζ
Bm
can be used for
contour smoothing as shown in Eq: 26 where P
Rough
is the segmentation mask before contour smoothing
and P
Smooth
is the one after smoothing. It is important
to note here that both methods return a smooth con-
tour, However while ∆ζ
m
requires only the rough seg-
mentation contour,
ˆ
ζ
m
also required the correspond-
ing ground-truth segmentation contour.
P
Smooth
= |P
Rough
− ∆ζ
Bm
| (26)
Algorithm 1: Calculate Roughness index(RI) of a 3D con-
tour.
Require: S ∈ {0,1} ∨ S[x, y, z]
(X
0
,Y
0
,Z
0
) ← 0
N ← 0
RI ← 0
for (X,Y,Z) ∈ S do
(X
0
,Y
0
,Z
0
) ← (X
0
,Y
0
,Z
0
) + (X,Y,Z)
N ← N + 1
end for
(X
0
,Y
0
,Z
0
) ← (X
0
,Y
0
,Z
0
)/N
M ← 0
for ∂S
w
∈ S do
C ← 0
for (X,Y,Z) ∈ ∂S
w
do
D
0
← D
0
+ |(X,Y, Z),(X
0
,Y
0
,Z
0
)|
L2
C ← C + 1
end for
D
0
← D
0
/C
N ← 0
R
s
← 0
for (X,Y,Z) ∈ ∂S
w
do
R
s
← R
s
+ |(|(X,Y, Z),(X
0
,Y
0
,Z
0
)|
L2
) − D
0
|
N ← N + 1
end for
R
s
← R
s
/N
M ← M + 1
RI ← RI + R
s
end for
RI ← RI/M
5 DISCUSSION &
EXPERIMENTATION
5.1 Results and Comparison
The Table 1 summarizes all the metrics that are cur-
rently being used for evaluation of 3D medical im-
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
89

ages. As stated earlier the region based metrics can-
not calculate the roughness and smoothness of a 3D
contour. Also Hausdorff distance is capable of find-
ing the maximum distance between the ground-truth
and predicted but it fails to capture the small rough-
ness on the surface.
In our experiments we used 2D and 3D segmen-
tation images of size (100 × 100) and (100 × 100 ×
100) as shown in Fig:4 and Fig:5 respectively. In both
cases (a) is a smooth segmentation treated as ground-
truth, (b) is a segmentation with small spike of 20
pixel length and (c) has many spikes, where the top
spike has the same length of 20 as (b) and all other
spikes are of smaller length for both 2D and 3D ex-
ample.
Mathematically the roughness index (RI) for a cir-
cle and sphere should be 0, but because for images the
coordinate system is integral not continuous, even a
smooth circle has a small RI greater then 0. Hence,
we treat it as Residual Roughness Index RI
Residual
. In
our experiments we have treated the RI for ground-
truth segmentation as residual. The absolute rough-
ness index RI
Absolute
can be calculated by subtracting
RI
Residual
from RI as shown in Eq:27 .
RI
Absolute
= RI − RI
Residual
(27)
In our experiments we varied the window size and
calculated roughness index for various window sizes.
For 2D image we first performed 2D convolution on
the image using a kernel and dilation operator to con-
vert the 2D image into a contour. We then used a 2D
window and moved it on the image and calculated the
variation of distance from each boundary location to
the center of gravity of the contour using mean dis-
tance for all boundary locations present in the win-
dow. We used the strides equal to the window size
so that each location is used to calculate roughness
index exactly once. The plot of RI and RR vs win-
dow size for images in Fig:4 is shown in Fig:10 and
Fig:11 respectively. Similarly for 3D images we first
performed 3D convolution on the image using a ker-
nel and dilation operator to convert the 3D image into
a contour. We then used a 3D window to calculate the
RI of each image in Fig:5. The RI and RR vs win-
dow size graph has been shown in Fig:12 and Fig:13
respectively.
It can be inferred from Fig:10 and Fig:11 that win-
dow size plays a very important role in RI calculation.
In our experimentation we found that the optimal win-
dow size must be between 3% to 10% of the image
smallest dimension. It is also important to note that
Roughness index is a standalone metrics but it can be
used to compare the roughness of two image through
roughness ratio that we have used in our experiments.
Figure 10: Graph of Roughness index Vs Window size for
2D images in Fig:4(a), (b) and (c).
Figure 11: Plot of Roughness ratio Vs window size
for Fig:4(a)(ground-truth), Fig:4(b)(little roughness pre-
dicted segmentation) and Fig:4(a)(ground-truth segmenta-
tion), Fig:4(c)(high roughness predicted segmentation).
Figure 12: Graph of Roughness index Vs Window size for
3D images in Fig:5(a), (b) and (c).
A tabular comparison between roughness ratio
(RR), average roughness distance (ARD) and Haus-
dorff distance (HDD) has been shown in Table 3. It
can be easily inferred from the table that RR and ARD
were capable of finding the difference in roughness
for the two image pairs that HDD failed to do.
For contour smoothing we used the algorithms
discussed in Sec:4.1 and Sec:4.3 to smooth the con-
BIOIMAGING 2021 - 8th International Conference on Bioimaging
90

Table 3: Comparison of Roughness Index RI, Roughness Ratio RR and Average Roughness Distance ARD with respect to
Hausdorff Distance, The window size considered for RI calculation is 7% of image size i.e. 7. From top to bottom Fig:4(a)(2D
ground-truth segmentation) and Fig:4(b)(2D little roughness predicted segmentation), Fig:4(a)(2D ground-truth segmenta-
tion) and Fig:4(c)(2D high roughness predicted segmentation), Fig:5(a)(3D ground-truth segmentation) and Fig:5(b)(3D little
roughness predicted segmentation), Fig:5(a)(3D ground-truth segmentation) and Fig:5(c)(3D high roughness predicted seg-
mentation).
Images
Absolute
Roughness
Index
Roughness
Ratio
Average
Roughness
Distance
Hausdorff
Distance
0 and 0.0120 0.0235 0.3178 20
0 and 0.0703 0.1377 0.7736 20
0 and 0.0015 0.0070 0.0592 20
0 and 0.0068 0.0317 0.0692 20
Figure 13: Plot of Roughness ratio Vs window size
for Fig:5(a)(ground-truth), Fig:5(b)(little roughness pre-
dicted segmentation) and Fig:5(a)(ground-truth segmenta-
tion), Fig:5(c)(high roughness predicted segmentation).
tours as shown in Fig:14. It is clear from Fig:14
that roughness distance method produces a more
satisfying result as compared to roughness matrix
method, The reason being that roughness distance
uses ground-truth segmentation as reference. How-
ever this is also a drawback because roughness dis-
tance method is constraint by the need of a refer-
ence distance matrix. Furthermore roughness dis-
tance method will produce unsatisfactory results if the
center of gravity for P and G are not same, i.e. the seg-
mentation masks are not aligned. However this prob-
lem can be overcome by using the center of gravity of
segmentation mask G for both P and G.
Roughness matrix method is a robust method
for detecting and removing surface roughness. For
roughness calculation we considered a window size of
three which includes a total of eight neighbors for 2D
and twenty six neighbors for 3D as shown in Fig:7.
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
91
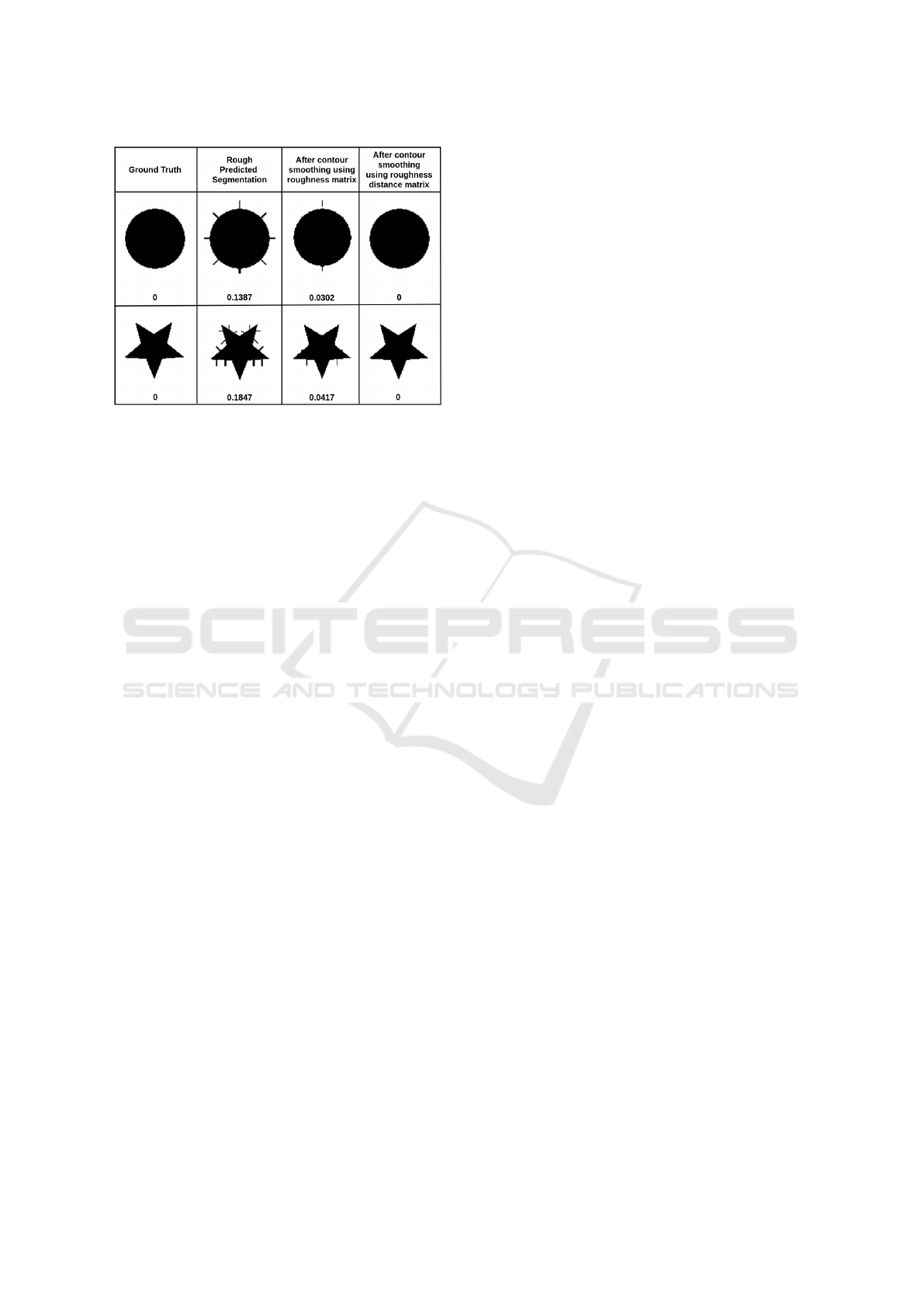
Figure 14: Contour smoothing for two type of segmenta-
tion, Circle (top) and star (bottom). Smoothing has been
performed using the methods discussed in sections Sec:4.1
and Sec:4.3 and the Absolute roughness index RI
Absolute
is
specified below each image. The window size for RI calcu-
lation is 7% of image size i.e. 7 and roughness threshold κ
, κ
c
for the given experiments was taken as 0.
this method is capable for detecting irregular spikes of
width 1 pixel, However this method can be extended
to detect spikes of multiple pixels by increasing the
window size and the number of neighbors in neigh-
bors set S
ζ
Neighbors
. The method for smoothing holes is
same but in that case we will add a surface point to
the surface instead of removing it in case of a spike.
6 CONCLUSION
In this paper we first discussed the pros and cons of
various metrics that have been commonly used for
the medical image segmentation task. We emphasize
more on the limitations of existing metrics for vol-
umetric segmentation. We then proposed (i) an al-
gorithm that helps to detect all irregular spikes/holes
that exist in the object surface; (ii) a roughness met-
ric that describes how rough of a given object; (iii)
a roughness distance that aims at comparing the sur-
faces between two given objects; (iv) an algorithm
that aims at removing irregular spikes/holes to smooth
the surface. Compare to other volumetric segmen-
tation metrics i.e. Hausdorff distance, our proposed
roughness distance is able to measure the topologi-
cal error whereas roughness metric present the sur-
face roughness. Furthermore, our proposed irregular
spikes/holes detection and surface smoothing can be
applied as a post-processing step in any image seg-
mentation algorithm to improve the accuracy.
ACKNOWLEDGEMENT
This research was supported in part by the Depart-
ment of Radiology, University of Arkansas of Medi-
cal Science UAMS.
REFERENCES
Campadelli, P., Casiraghi, E., and Esposito, A. (2009).
Liver segmentation from computed tomography
scans: a survey and a new algorithm. Artificial in-
telligence in medicine, 45(2-3):185–196.
Campadelli, P., Casiraghi, E., and Pratissoli, S. (2010). A
segmentation framework for abdominal organs from
ct scans. Artificial Intelligence in Medicine, 50(1):3–
11.
Chang, J.-R., Chang, K.-T., and Chen, D.-H. (2006). Ap-
plication of 3d laser scanning on measuring pave-
ment roughness. Journal of Testing and Evaluation,
34(2):83–91.
Chen, X., Udupa, J. K., Bagci, U., Zhuge, Y., and Yao,
J. (2012a). Medical image segmentation by combin-
ing graph cuts and oriented active appearance models.
IEEE TIP, 21(4):2035–2046.
Chen, Y., Wang, Z., Hu, J., Zhao, W., and Wu, Q. (2012b).
The domain knowledge based graph-cut model for
liver ct segmentation. Biomedical Signal Processing
and Control, 7(6):591–598.
Dice, L. R. (1945). Measures of the amount of ecologic
association between species. Ecology, 26(3):297–302.
Gadelmawla, E., Koura, M., Maksoud, T., Elewa, I., and
Soliman, H. (2002). Roughness parameters. Journal
of materials processing Technology, 123(1):133–145.
Gerig, G., Jomier, M., and Chakos, M. (2001). Valmet:
A new validation tool for assessing and improving
3d object segmentation. In MICCAI, pages 516–523.
Springer.
Heimann, T., Van Ginneken, B., Styner, M. A., Arzhaeva,
Y., Aurich, V., et al. (2009). Comparison and eval-
uation of methods for liver segmentation from ct
datasets. TIP, 28(8):1251–1265.
Joshi, A. A., Shattuck, D. W., Thompson, P. M., and Leahy,
R. M. (2007). Surface-constrained volumetric brain
registration using harmonic mappings. IEEE Trans
Med Imaging, 26(12):1657–1669.
Li, K., Wu, X., Chen, D. Z., and Sonka, M. (2006). Optimal
surface segmentation in volumetric images-a graph-
theoretic approach. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 28(1):119–134.
Linguraru, M. G., Pura, J. A., Pamulapati, V., and Summers,
R. M. (2012). Statistical 4d graphs for multi-organ
abdominal segmentation from multiphase ct. Medical
image analysis, 16(4):904–914.
Linguraru, M. G., Yao, J., Gautam, R., Peterson, J., Li, Z.,
Linehan, W. M., and Summers, R. M. (2009). Re-
nal tumor quantification and classification in contrast-
enhanced abdominal ct. PR, 42(6):1149–1161.
BIOIMAGING 2021 - 8th International Conference on Bioimaging
92

Liu, Y., Cheng, H.-D., Huang, J., Zhang, Y., and Tang, X.
(2012). An effective approach of lesion segmentation
within the breast ultrasound image based on the cel-
lular automata principle. Journal of digital imaging,
25(5):580–590.
Shi, R., Ngan, K. N., and Li, S. (2013). The objective
evaluation of image object segmentation quality. In
International Conference on Advanced Concepts for
Intelligent Vision Systems, number 3, pages 470–479.
Springer.
Tonietto, L., Gonzaga, L., Veronez, M. R.,
de Souza Kazmierczak, C., Arnold, D. C. M.,
and da Costa, C. A. (2019). New method for evalu-
ating surface roughness parameters acquired by laser
scanning. Scientific reports, 9(1):1–16.
Wolz, R., Chu, C., Misawa, K., Mori, K., and Rueckert, D.
(2012). Multi-organ abdominal ct segmentation us-
ing hierarchically weighted subject-specific atlases. In
MICCAI, pages 10–17. Springer.
Wu, X. and Chen, D. Z. (2002). Optimal net surface prob-
lems with applications. In Automata, Languages and
Programming, pages 1029–1042.
Yokota, F., Okada, T., Takao, M., Sugano, N., Tada, Y.,
Tomiyama, N., and Sato, Y. (2013). Automated ct seg-
mentation of diseased hip using hierarchical and con-
ditional statistical shape models. In MICCAI, pages
190–197. Springer.
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
93
