
A Benchmark for 3D Reconstruction from Aerial Imagery
in an Urban Environment
Susana Ruano and Aljosa Smolic
V-SENSE, Trinity College Dublin, Ireland
Keywords:
Benchmark, 3D Reconstruction, Structure-from-Motion, Multi-view Stereo.
Abstract:
This paper presents a novel benchmark to evaluate 3D reconstruction methods using aerial images in a large-
scale urban scenario. In particular, it presents an evaluation of open-source state-of-the-art pipelines for image-
based 3D reconstruction including, for the first time, an analysis per urban object category. Therefore, the
standard evaluation presented in generalist image-based reconstruction benchmarks is extended and adapted
to the city. Furthermore, our benchmark uses the densest annotated LiDAR point cloud available at city scale
as ground truth and the imagery captured alongside. Additionally, an online evaluation server will be made
available to the community.
1 INTRODUCTION
Creating 3D models from a collection of images
is a classic problem in computer vision (Hartley
and Zisserman, 2003), it has been extensively stud-
ied (Snavely et al., 2008; Sweeney et al., 2015;
Moulon et al., 2013; Sch
¨
onberger and Frahm, 2016;
Furukawa and Ponce, 2010; Barnes et al., 2009;
Sch
¨
onberger et al., 2016) and it is used in fields such
as augmented and virtual reality (Ruano et al., 2017;
Pag
´
es et al., 2018). The common procedure to gener-
ate a 3D reconstruction from a collection of images
begins with the detection and matching of features
which are given as input to a Structure-from-Motion
(SfM) algorithm to recover the camera poses and a
sparse model (Snavely et al., 2008). Then, to densify
the skeleton of the reconstruction given by the sparse
3D point cloud a Multi-View Stereo (MVS) algorithm
is applied (Hartley and Zisserman, 2003). The meth-
ods can be configured according to the particularities
of the scene (e.g., smoothness of the terrain (Ruano
et al., 2014)) but the majority of them considers gen-
eral scenarios and specially, the ones which are open-
source are widely used (Stathopoulou et al., 2019).
Despite the constant and recent progress in 3D re-
construction techniques, one of the problems that has
been pointed out is the lack of ground-truth models
to test the algorithms (Schops et al., 2017; Knapitsch
et al., 2017). These models are difficult to obtain with
the appropriate density and quality because their col-
lection is usually done with active techniques that re-
quire special equipment (e.g., LiDAR) and it is not
always accessible. Still, some efforts were made in
the past to fulfill those necessities and several bench-
marks were created (Seitz et al., 2006; Schops et al.,
2017; Knapitsch et al., 2017). This ranges from
the first widely known Middlebury benchmark (Seitz
et al., 2006) with only two pieces of ground truth cap-
tured indoors in a controlled environment, to the lat-
est releases such as ETH3D (Schops et al., 2017) and
Tanks and Temples (Knapitsch et al., 2017), which
include outdoor areas.
A commonality in recent benchmarks is that the
challenges for the reconstruction methods are based
on the variety of scenarios they provide to do the
evaluation. Although this is a valid strategy, urban
scenarios can provide itself with a great variety of
challenges, even in the same city, due to the hetero-
geneity of elements that can be found there. As sug-
gested in (Zolanvari et al., 2019), the analysis of a
reconstruction in terms of categories of elements of
a city will be of interest to support the observations
that can be done about different parts of the city with
quantitative measurements. Fortunately, the interest
of the community in deep learning techniques with
3D data has pushed the creation of ground-truth data
with a categorization of urban elements but, still there
are new benchmarks focusing on urban environments
which do not incorporate this information in their 3D
reconstruction analysis (
¨
Ozdemir et al., 2019).
In this paper, we present a benchmark that offers
an extensive evaluation for 3D reconstruction algo-
732
Ruano, S. and Smolic, A.
A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment.
DOI: 10.5220/0010338407320741
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
732-741
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

rithms thanks to a broad study of a large urban envi-
ronment. It uses as ground truth the densest annotated
point cloud available at city scale, DublinCity (Zolan-
vari et al., 2019), which presents a remarkable level
of detail in the annotations allowing for an evaluation
of image-based 3D reconstruction methods not only
at scene level but also per category of urban element,
which is a unique feature compared to previous avail-
able benchmarks. The benchmark includes three dif-
ferent sets of images that are created from aerial im-
ages with two different camera configurations. Fur-
thermore, we provide online evaluation so new 3D re-
construction methods can be assessed through a com-
mon comparative evaluation setup.
2 RELATED WORK
The first widely known benchmark for MVS is the
Middlebury (Seitz et al., 2006), which consists of
two ground-truth models captured with a laser stripe
scanner and three different sets of images per model.
This benchmark was later extended in (Aanæs et al.,
2016), where they increased the number of considered
3D models with corresponding images, with differ-
ent lighting conditions for each set. However, both
of them were captured in a controlled environment
and lack of any scene outside of the laboratory. One
benchmark that overcomes the limitation of provid-
ing ground truth only in a confined space is the EPFL
benchmark (Strecha et al., 2008), which includes re-
alistic scenes captured outdoors with a terrestrial Li-
DAR. This was an advantage compared to previous
ones but they only covered a few scenarios such as a
facade of a building or a fountain. Further, it has the
limitation of terrestrial LiDAR which can only par-
tially cover the scenes.
The ETH3D benchmark (Schops et al., 2017)
however, shows a wide variety of indoor and out-
door scenarios. In particular, different areas are cov-
ered (e.g., a courtyard, a meadow, a playground) to
test the algorithms against different challenges. How-
ever, the models were captured with a terrestial Li-
DAR and they do not provide details of the tops of
the buildings such as the roofs. At a similar time the
Tanks and Temples (Knapitsch et al., 2017) bench-
mark was released, which also gained a lot of in-
terest. The main difference to ETH3D, is that they
use video as input, and they evaluate the complete
pipeline including SfM and MVS, not only MVS, be-
cause they want to stimulate research that solves the
image-based 3D reconstruction problem as a whole,
including the estimation of the camera positions.
Other benchmarks which are solely focused on urban
Area 1
Area 2
Figure 1: Areas evaluated in the benchmark. At the top,
the areas of the the city under study are overlaid in the map.
At the bottom, a top view of the ground truth of each area
is depicted with a different color per class. Area 1 is on the
left and Area 2 is on the right.
environments are the Kitti benchmark (Menze and
Geiger, 2015) and the TerraMobilita/iQmulus bench-
mark (Vallet et al., 2015). Both of them use 3D Mo-
bile Laser Scanning (MLS) as ground truth. The for-
mer includes the images captured alongside to evalu-
ate several tasks such as scene flow, stereo, object de-
tection but it does not include neither aerial data nor
a specific MVS evaluation. The latter only provides
annotated 3D data, similar to the Paris-rue-madame
dataset (Serna et al., 2014) and the Oakland 3D Point
Cloud dataset (Munoz et al., 2009), but no images are
included and therefore the evaluation is done for tasks
like object segmentation and object classification.
The Toronto/Vaihingen ISPRS benchmark used
in (Zhang et al., 2018) is not limited by the use of
MLS to create the ground-truth model. However, al-
though a large-scale urban scenario is covered, the 3D
building models are not created from the images, they
are created from the Aerial Laser Scan (ALS) point
cloud. Also, Urban Semantic 3D data (Bosch et al.,
2019) is a large-scale public dataset that includes se-
mantic labels for two large cities but it uses satellite
A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment
733

Figure 2: Hidden areas. On the left, an example of a hidden
area (in color) over the whole region (in grey). On the right,
the hidden area represented in 3D.
imagery and they do not provide a semantic evalua-
tion of the 3D reconstruction. The ISPRS Test project
on Urban Classification and 3D Building Reconstruc-
tion (Rottensteiner et al., 2014) have airborne images
but the number of images offered is no more than 20
per area, the benchmark reconstruction task is focused
on roofs, the density of the ALS is 6 points per m
2
,
and they only provide one type of images per set. One
of the most recent annotated LiDAR point clouds cap-
tured with ALS is DublinCity (Zolanvari et al., 2019),
which also includes airborne images associated (Lae-
fer et al., 2015). The average density of the ALS
point cloud is remarkable compared to other existing
datasets (i.e., 348.43 points/m
2
) and the LiDAR point
cloud is used as ground truth for the evaluation of an
image-based 3D reconstruction, but they do not in-
clude the annotations in the evaluation.
3 BENCHMARK DATASET
Area Selection. The initial dataset of Dublin city cen-
ter (Laefer et al., 2015) and the annotations incorpo-
rated in (Zolanvari et al., 2019) are used for the cre-
ation of this benchmark. We analysed the whole an-
notated dataset (the potential ground truth) to ensure
that the selected areas constitute a good representation
of the city and also, that they have a balanced distri-
bution of points in each category, so content diversity
and representativeness is guaranteed for an evaluation
per urban object category. The criteria used to choose
the specific tiles for evaluation are based on the area
of the city covered, the variety of the city elements in
them and the avoidance of potential sources of errors.
In particular, we have discarded the ones that are
covering less than 250 × 250 m
2
of the city, the ones
that include less than 1% of points corresponding to
grass and less than 4% of points corresponding to
trees. Also, we discarded tiles with points in the unde-
fined class above 10% and the ones containing cranes,
because they may degrade performance. With these
(a) (b)
Figure 3: Images. (a) a sample of the nadir set of images;
(b) a sample of the oblique one.
criteria two tiles are left, that will be the areas used in
this benchmark, shown in Fig. 1 and will allow us to
have a representative part of the city while keeping the
amount of data that have to be processed reasonable.
Hidden Areas. We are also evaluating a specific re-
gion in each area that will not be revealed to the user
to avoid fine tuning during online evaluation (see Sec-
tion 4). We call these regions hidden areas and we
show an example of a potential hidden area in Fig. 2.
As it can be seen, they consist of meaningful sec-
tions of the city spread across the ground truth (each
of them including several classes). We have selected
them taking the class distribution into account but the
exact portions of the ground truth that belongs to the
hidden area are not revealed.
Area Description. We are evaluating two different
regions of the city of Dublin (depicted in red in Fig. 1)
which were selected following the aforementioned
analysis. Area 1 encompasses the south west part of
Trinity College Dublin (TCD) campus, several streets
of the city, buildings and green areas. Area 2 includes
the north east of the TCD campus, different buildings,
streets and it includes parts of rail tracks.
Table 1 shows the distribution of the classes in
terms of number of points and the percentage of
points in the whole ground truth and the hidden areas.
It can be seen that the most populated class is roof
and the one with least representation is doors. Never-
theless, the percentage of the class roof in the hidden
areas is more balanced with the other classes. It can
also be observed that the undefined data, which is a
potential source of inaccuracies, represents between
5% and 9% of the points. Area 1 has almost double of
points in the window category and almost four times
of windows in the roof. Furthermore, Area 2 triples
the number of points associated with grass in Area 1.
For each area, three different sets of images are
used to create the reconstructions: oblique, nadir and
combined. Oblique and nadir contain images from
the homonyms groups explained in (Zolanvari et al.,
2019) and a sample of each group is shown in Fig. 3.
The combined group contains the images from both of
them. The initial dataset contains a large number of
oblique and nadir images, many more than needed for
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
734

Table 1: Number of points and percentage of points per class in each evaluated area. Also the number of points and percentage
used as the hidden zone.
undefined
facade
window
door
roof
r. window
r. door
sidewalk
street
grass
tree
Area 1
# points (×10
3
) 1397 3048 540 40 10727 481 3 2029 3210 1587 3471
percentage 5.27 11.49 2.04 0.15 40.43 1.81 0.01 7.65 12.10 5.98 13.08
hidden # p. (×10
3
) 1015 1816 312 27 2849 247 2 1602 2441 1353 2720
hidden pct. 7.06 12.63 2.17 0.19 19.81 1.72 0.01 11.14 16.97 9.41 18.91
Area 2
# points (×10
3
) 1615 2776 308 40 7807 112 3 2789 2642 4061 2852
percentage 6.46 11.10 1.23 0.16 31.22 0.45 0.01 11.15 10.57 16.24 11.41
hidden # p. (×10
3
) 1262 1547 220 27 2708 47 1 2010 1993 2226 1897
hidden pct. 9.05 11.105 1.58 0.19 19.43 0.34 0.01 14.42 14.30 15.97 13.61
a meaningful 3D reconstruction of a particular area.
Further, it is not obvious which images are associated
with a certain area. In order to identify a meaning-
ful subset of images, we ran the COLMAP SfM al-
gorithm (Sch
¨
onberger and Frahm, 2016) with all the
oblique images of the initial dataset. We then selected
the subset of images, where each generated at least
1500 3D points in the areas under evaluation. The
same process was done with the nadir images.
4 EVALUATION
Pipelines Tested. In this benchmark, we evaluate the
3D dense point cloud obtained when an image-based
reconstruction pipeline is applied to a collection of
aerial images. Usually, research is focused on solving
one specific problem of the pipeline: SfM or MVS.
However, we want to allow the possibility of evaluat-
ing new techniques that can solve the problem with
a different approach, not necessarily applying SfM
followed by MVS. Furthermore, as we are not in a
controlled environment, we do not have the camera
positions with accuracy to be used as ground-truth.
Instead, we have the GPS, which is only a coarse ap-
proximation. For these reasons, we are only evaluat-
ing the final 3D reconstruction, not the intermediate
steps.
To do the state-of-the-art evaluation we have se-
lected different pipelines that were studied in the
latest comparison of open-source 3D reconstruction
methods (Stathopoulou et al., 2019). Following this
approach we established the pipelines assembling
compatible SfM and MVS methods. In particular,
for SfM, we use COLMAP (Sch
¨
onberger and Frahm,
2016) which includes a geometric verification strat-
egy to improve robustness on initialization and tri-
angulation and an improved bundle adjustment strat-
egy with an outlier filtering strategy. Besides, we
selected OpenMVG with two different approaches:
global (Moulon et al., 2013), with a global calibra-
tion approach based on the fusion of relative mo-
tions between image pairs; and incremental (Moulon
et al., 2012), that iteratively adds new estimations to
an initial reconstruction minimizing the drift with suc-
cessive steps of non-linear refinement. Furthermore,
for MVS, we choose COLMAP (Sch
¨
onberger et al.,
2016) that makes a joint estimation of depth and nor-
mal information and makes a pixelwise view selec-
tion using photometric and geometric priors. We also
use OpenMVS (Sch
¨
onberger et al., 2016), that uses
an efficient patch based stereo matching followed by
a depth-map refinement process. In (Stathopoulou
et al., 2019), AliceVision was also tested, but we
are not including it in our evaluation because it di-
rectly produces a mesh, without providing a dense
point cloud representation as an exploitable interme-
diate step. However, AliceVision is based on the
incremental OpenMVG (Moulon et al., 2012) and
the CMPMVS (Jancosek and Pajdla, 2011) which
can handle weakly textured surfaces. We selected
the former method for SfM but the latter is no
longer publicly available. To sum up, Fig. 4 shows
the details of the six pipelines tested in the bench-
mark: (1) COLMAP(SfM) + COLMAP(MVS); (2)
COLMAP(SfM) + OpenMVS; (3) OpenMVG-g +
COLMAP(MVS); (4) OpenMVG-g + OpenMVS; (5)
OpenMVG-i + COLMAP(MVS); (6) OpenMVG-i +
OpenMVS. The version of COLMAP, OpenMVG and
OpenMVS used are v3.6, v1.5 and v1.1 respectively,
and, as it is depicted in the figure, four stages are
needed: SfM, geo-registration, data preparation and
MVS. The SfM step includes the feature detection
and matching provided by each of the methods used.
The parameters used for COLMAP are the same as
in DublinCity (Zolanvari et al., 2019), and the param-
eters used for OpenMVG are the default: SIFT for
feature detection, essential matrix filtering for com-
puting matches for global, and fundamental matrix
A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment
735

SfM Geo-registration MVS
Data preparation
OpenMVG
incremental
COLMAP
aligner
InterfaceCOLMAP
(OpenMVS)
OpenMVG2OpenMVS
(OpenMVG)
OpenMVG2COLMAP
(OpenMVG)
COLMAP
OpenMVG
global
OpenMVG
geodesy
registration
OpenMVG2OpenMVS
(OpenMVG)
OpenMVG2COLMAP
(OpenMVG)
Undistortion
(COLMAP)
Undistortion
(COLMAP)
Undistortion
(COLMAP)
COLMAP
OpenMVS
COLMAP
OpenMVS
COLMAP
OpenMVS
(1)
(2)
(3)
(4)
(5)
(6)
Figure 4: Scheme of 3D reconstruction pipelines tested. (1) COLMAP+COLMAP, (2) COLMAP+OpenMVS, (3) Open-
MVGg+COLMAP, (4) OpenMVGg+OpenMVS, (5) OpenMVGi+COLMAP, (6) OpenMVGi+OpenMVS.
Figure 5: Registration. Skyline of the ground-truth (in red)
against the 3D reconstructions with oblique (in green), nadir
(in purple) and the combined (in blue) sets of images. On
the top, the coarse registration, at the bottom, the fine one.
filtering for incremental. After the SfM is done, the
geo-information of the dataset is used for a coarse
registration of the point cloud (i.e, geo-registration),
and we use the methods provided by COLMAP and
OpenMVG.
After the geo-registration is done, we have to pre-
pare the data to be densified. For that reason, we use
the different procedures proposed for each method for
converting the formats and undistorting the images.
We used the same parameters each time we applied
the same procedure. Finally, the last step is the den-
sification which is done with the recommended pa-
rameters in COLMAP and OpenMVS except when
an image reduction was needed for OpenMVS. In that
case, we used the parameters reported in the ETH3D
benchmark which were not hard-coded.
Alignment. The strategies for the alignment of the
3D reconstructions with the ground truth usually con-
sist of two steps: a coarse alignment followed by the
refinement of the initial estimation. In our evaluation,
the coarse registration is done in the geo-registration
step of the pipelines, and as a consequence, the dense
point clouds generated are already coarsely regis-
tered with the LiDAR scan. As an example, the re-
sults of the coarse registration with the COLMAP +
COLMAP pipeline are shown on the left in Fig. 5.
The skyline of the ground truth is depicted in red
and the 3D reconstructions in blue (oblique images),
green (nadir images) and purple (combined).
The refinement of the registration is commonly
done applying a 7DoF ICP algorithm. This is the
strategy followed in (Knapitsch et al., 2017). A
more sophisticated approach is used in (Schops et al.,
2017), but they use the color information of the laser
scan, which is not available in our benchmark. In our
approach, we use the point cloud obtained from the
first pipeline to refine the coarse registration with the
ground-truth applying an ICP algorithm. Then, for
the rest of the pipelines, we use the camera positions
of the already refined one as a reference, and we ap-
ply the same ICP algorithm to obtain the transforma-
tions that will align the cameras. After that, we ap-
ply the transformation to the entire 3D point clouds.
For online evaluation using our benchmark we will
require the input 3D point cloud to be already regis-
tered, which will allow users to use and optimize their
own registration.
Measurements. For the evaluation we use the mea-
surements proposed in (Knapitsch et al., 2017; Zolan-
vari et al., 2019). In particular, we use: precision, P,
recall, R and F score, F. The precision, shows how
closely the reconstruction is to the ground truth, the
recall, is related to how complete the reconstruction
is, and the F score, is a combination of both. Other
measurements as the mean distance between the point
clouds could be used as in (Stathopoulou et al., 2019),
but the advantage of the selected ones is that they are
less affected by outliers. They are defined in Eq. (1),
Eq. (2), Eq. (3), respectively, for a given threshold dis-
tance d. In the equations, I is the point cloud under
evaluation and G is the ground-truth point cloud. |·| is
the cardinality and dist
I→G
(d) are the points in I with
a distance to G less than d and dist
G→I
(d) is analo-
gous (i.e., dist
A→B
(d) = {a ∈ A | min
b∈B
ka − bk
2
< d},
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
736
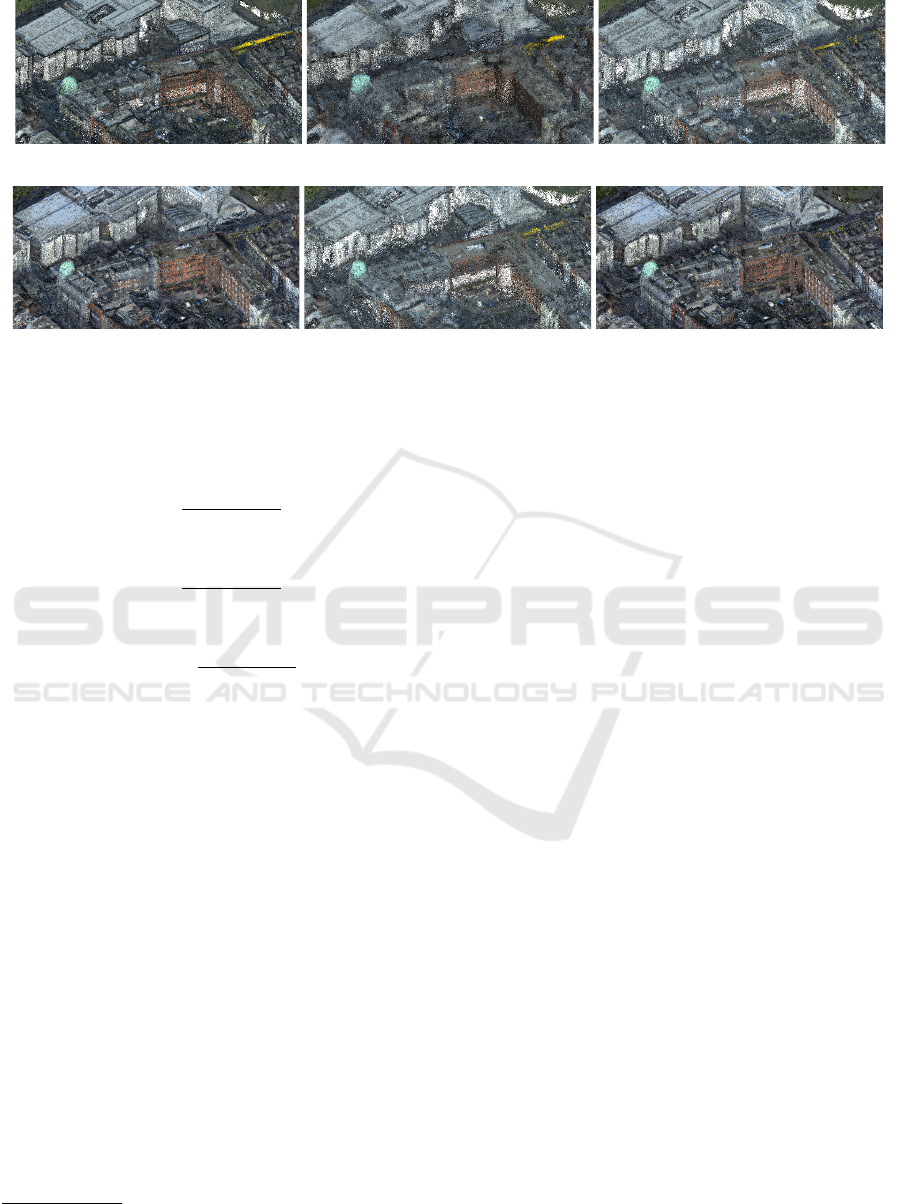
(a) (b) (c)
(d) (e) (f)
Figure 6: Qualitative 3D reconstruction results. Point clouds obtained with the oblique and nadir images combined in Area
1 with each of the pipelines tested (a) COLMAP + COLMAP, (b) COLMAP + OpenMVS, (c) OpenMVG-g + COLMAP, (d)
OpenMVG-g + OpenMVS, (e) OpenMVG-i + COLMAP, (f) OpenMVG-i + OpenMVS.
A and B being point clouds).
P(d) =
|dist
I→G
(d)|
|I|
100 (1)
R(d) =
|dist
G→I
(d)|
|G|
100 (2)
F(d) =
2P(d)R(d)
P(d) + R(d)
(3)
To perform the evaluation per class, the point under
evaluation will be given the same class as its nearest
neighbor in the ground-truth.
Online Evaluation. We will provide online eval-
uation
1
of the 3D reconstructions to stimulate and
support progress in the field. The users should pro-
vide the final dense point cloud already registered to
the ground truth. This will be possible because the
ground truth will be publicly available. To ensure a
fair comparison, we will be calculating the precision,
recall and F score not only in the complete ground
truth but also in the hidden areas.
5 RESULTS
We report the precision, recall and F score values for
each selected pipeline, set of images and area, includ-
ing the hidden parts. The measurements were calcu-
lated with d in the range of 1 cm to 100 cm obtain-
ing, as expected, an increasing performance in every
1
https://v-sense.scss.tcd.ie/research/6dof/benchmark-
3D-reconstruction
method when a further distance was considered. We
report the results at 25 cm, similar to (Zolanvari et al.,
2019), as a good compromise between the limitations
of the image resolution and the meaningfulness of the
precision, since selecting a very small distance would
mean poorer performances for all the methods and
with a larger distance the precision would be less in-
formative.
Scene Level Evaluation. Table 2 shows the evalu-
ation of the pipelines’ outcomes against the ground-
truth models without considering the urban element
category. From these measurements, we can ob-
serve that reconstructions from oblique imagery as in-
put, achieve the lowest recall values in all the areas.
Therefore, the precision has a main role in achieving
a high F score for this image set category. In particu-
lar, COLMAP + COLMAP has the best performance
(F score) with that type of imagery in every area. Ad-
ditionally, the reconstructions done with the nadir im-
age set have higher recall values than the ones with
the oblique imagery. Also, the recall is usually higher
than the precision for these sets so the accuracy is not
as determinant as in the oblique sets. As can be ob-
served, COLMAP + COLMAP is the best pipeline in
Area 1 whereas OpenMVG-i + OpenMVS is the best
in Area 2 (even in the hidden parts). These results
suggest that having different camera angles and less
coverage of the same parts of the scene (as it is the
case in the oblique set and not in the nadir one) makes
the recall value decrease while the precision remains
similar.
For the reconstructions obtained with the com-
bined imagery, OpenMVG-g + OpenMVS and
OpenMVG-i + OpenMVS have the highest F score:
A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment
737

Table 2: Quantitative results with the whole ground-truth. Each row shows the results of a specific 3D reconstruction
pipeline giving the precision / recall / F score for d=25cm obtained for the reconstruction in each set of images in each area.
The best score for each area and image set is in bold letters and the pipelines are as follow: (1) COLMAP + COLMAP,
(2) COLMAP + OpenMVS, (3) OpenMVG-g + COLMAP, (4) OpenMVG-g + OpenMVS, (5) OpenMVG-i + COLMAP, (6)
OpenMVG-i + OpenMVS.
Area 1 Area 2
oblique nadir oblique and nadir oblique nadir oblique and nadir
(1) 79.18 / 60.5 / 68.59 73.08 / 68.98 / 70.97 74.89 / 74.15 / 74.52 80.48 / 65.51 / 72.23 74.97 / 72.34 / 73.63 76.54 / 77.98 / 77.25
(2) 22.74 / 28.28 / 25.21 23.96 / 46.23 / 31.57 27.93 / 60.84 / 38.29 26.85 / 41.81 / 32.7 24.45 / 49.96 / 32.83 24.7 / 63.53 / 35.57
(3) 49.42 / 13.09 / 20.69 44.02 / 47.95 / 45.9 48.74 / 58.24 / 53.07 36.92 / 15.7 / 22.03 33.26 / 36.4 / 34.76 41.94 / 50.3 / 45.74
(4) 61.07 / 57.1 / 59.02 56.61 / 73.46 / 63.94 78.27 / 80.49 / 79.36 40.23 / 54.27 / 46.21 75.2 / 75.92 / 75.56 79.3 / 82.03 / 80.64
(5) 37.13 / 16.59 / 22.94 36.59 / 43.62 / 39.8 39.48 / 51.36 / 44.64 38.11 / 15.11 / 21.64 43.76 / 52.0 / 47.52 36.62 / 48.53 / 41.74
(6) 55.12 / 64.37 / 59.39 49.14 / 70.75 / 58.0 74.19 / 79.5 / 76.76 58.52 / 70.43 / 63.92 71.44 / 79.0 / 75.03 79.77 / 82.54 / 81.13
hidden Area 1 hidden Area 2
oblique nadir oblique and nadir oblique nadir oblique and nadir
(1) 78.68 / 49.89 / 61.06 72.69 / 62.77 / 67.37 74.54 / 68.34 / 71.3 80.06 / 61.48 / 69.55 73.63 / 68.9 / 71.18 75.5 / 75.27 / 75.39
(2) 23.55 / 18.97 / 21.01 24.42 / 36.88 / 29.39 28.38 / 50.45 / 36.32 27.05 / 37.02 / 31.26 24.24 / 43.98 / 31.25 24.4 / 56.88 / 34.15
(3) 43.12 / 6.61 / 11.46 42.52 / 38.01 / 40.14 48.48 / 48.74 / 48.61 36.47 / 13.19 / 19.37 33.08 / 31.82 / 32.43 40.97 / 43.7 / 42.29
(4) 56.57 / 48.7 / 52.34 56.03 / 69.48 / 62.03 75.36 / 75.76 / 75.56 40.31 / 54.08 / 46.19 74.93 / 74.31 / 74.62 77.19 / 79.52 / 78.34
(5) 30.83 / 8.88 / 13.79 36.51 / 35.47 / 35.98 38.79 / 42.08 / 40.37 35.24 / 12.3 / 18.24 43.7 / 47.28 / 45.42 35.35 / 42.39 / 38.55
(6) 52.93 / 59.33 / 55.95 48.47 / 67.81 / 56.53 70.56 / 75.02 / 72.72 56.16 / 67.58 / 61.34 67.99 / 77.08 / 72.25 78.38 / 80.49 / 79.42
Table 3: Quantitative results per urban element. Results for F score (top), precision (middle) and recall (bottom) for Area
1 and Area 2 at d=25cm. Each row gives the result for a particular class, first in the whole area and then in the hidden area,
separated with a hyphen. The best score obtained among the pipelines is shown with the pipeline that generated it in brackets,
numbered as in Fig. 4. In bold, the best measurement per class among all the image sets in both areas. Pipelines are as follow:
(1) COLMAP + COLMAP, (2) COLMAP + OpenMVS, (3) OpenMVG-g + COLMAP, (4) OpenMVG-g + OpenMVS, (5)
OpenMVG-i + COLMAP, (6) OpenMVG-i + OpenMVS.
F SCORE
Area 1 - Area 1 hidden Area 2 - Area 2 hidden
oblique nadir combined oblique nadir combined
facade 58.34 (1) - 57.1 (1) 59.96 (4) - 59.08 (4) 67.01 (4) - 65.91 (4) 63.12 (1) - 62.17 (1) 67.7 (6) - 65.82 (6) 71.73 (6) - 70.83 (6)
window 58.83 (1) - 58.18 (1) 53.92 (4) - 53.83 (4) 62.41 (1) - 62.45 (1) 55.06 (1) - 57.2 (1) 61.73 (6) - 60.9 (6) 63.34 (6) - 63.59 (6)
door 41.97 (1) - 45.46 (1) 51.55 (4) - 52.55 (4) 53.14 (4) - 52.96 (4) 49.18 (6) - 48.63 (6) 53.84 (6) - 51.07 (6) 56.57 (6) - 56.69 (6)
roof 80.78 (1) - 75.55 (1) 80.18 (1) - 77.39 (1) 87.98 (4) - 85.55 (4) 81.57 (1) - 80.66 (1) 81.41 (1) - 80.06 (1) 86.05 (6) - 85.53 (6)
r. window 77.33 (1) - 77.67 (1) 73.78 (1) - 74.68 (1) 85.06 (4) - 85.04 (4) 74.54 (1) - 74.53 (1) 76.36 (6) - 78.54 (6) 83.0 (4) - 84.89 (6)
r. door 57.72 (1) - 65.94 (4) 53.58 (4) - 58.63 (3) 63.83 (4) - 69.3 (4) 50.1 (6) - 45.14 (1) 53.29 (6) - 41.27 (4) 50.71 (6) - 43.13 (6)
sidewalk 76.46 (6) - 74.99 (6) 79.76 (1) - 79.85 (1) 87.86 (4) - 87.42 (4) 79.11 (1) - 80.05 (1) 87.56 (4) - 87.14 (4) 88.28 (6) - 88.03 (6)
street 77.28 (1) - 74.91 (1) 85.85 (1) - 85.9 (1) 90.72 (4) - 90.78 (4) 71.02 (1) - 68.67 (1) 90.88 (4) - 90.55 (4) 90.81 (6) - 90.5 (6)
grass 84.12 (6) - 82.76 (6) 79.75 (1) - 77.38 (1) 88.79 (4) - 87.97 (4) 91.1 (1) - 89.1 (1) 95.59 (4) - 93.6 (4) 96.36 (6) - 94.91 (6)
tree 31.74 (6) - 32.55 (6) 38.47 (4) - 38.37 (4) 40.92 (1) - 40.21 (6) 25.34 (1) - 28.09 (1) 33.7 (1) - 35.08 (1) 39.45 (1) - 41.34 (1)
PRECISION
Area 1 - Area 1 hidden Area 2 - Area 2 hidden
oblique nadir combined oblique nadir combined
facade 75.23 (1) - 75.84 (1) 61.32 (1) - 62.59 (1) 66.9 (1) - 68.04 (1) 73.77 (1) - 74.81 (1) 66.71 (6) - 64.7 (6) 68.33 (1) - 69.01 (1)
window 64.97 (1) - 65.13 (1) 54.16 (1) - 56.04 (1) 60.75 (1) - 62.14 (1) 63.77 (1) - 63.84 (1) 56.53 (6) - 55.17 (6) 59.09 (1) - 59.16 (1)
door 59.1 (1) - 58.75 (1) 42.31 (4) - 43.6 (4) 47.34 (1) - 46.05 (1) 55.49 (1) - 54.64 (1) 49.25 (6) - 45.61 (6) 48.06 (4) - 48.44 (6)
roof 81.56 (1) - 80.58 (1) 77.05 (1) - 74.96 (1) 84.08 (4) - 80.21 (4) 83.21 (1) - 83.35 (1) 78.56 (1) - 77.46 (1) 81.16 (6) - 80.91 (6)
r. window 78.96 (1) - 80.13 (1) 70.18 (1) - 72.01 (1) 79.43 (4) - 78.29 (4) 81.25 (1) - 83.9 (1) 80.25 (1) - 82.71 (1) 80.65 (1) - 84.08 (1)
r. door 63.5 (1) - 62.5 (1) 48.32 (1) - 55.11 (4) 54.66 (1) - 59.58 (1) 65.19 (1) - 63.67 (1) 45.04 (6) - 40.6 (4) 45.99 (6) - 40.99 (1)
sidewalk 88.51 (1) - 88.48 (1) 80.37 (1) - 81.26 (1) 83.35 (4) - 83.16 (1) 87.79 (1) - 87.55 (1) 83.66 (4) - 83.26 (4) 82.67 (6) - 82.32 (6)
street 90.97 (1) - 90.86 (1) 83.27 (1) - 83.28 (1) 86.43 (4) - 86.35 (4) 87.23 (1) - 86.92 (1) 86.71 (4) - 86.46 (4) 85.91 (6) - 85.87 (6)
grass 92.32 (1) - 91.33 (1) 84.18 (1) - 82.37 (1) 89.35 (4) - 88.73 (4) 95.91 (1) - 94.75 (1) 96.11 (4) - 94.39 (4) 95.88 (4) - 94.15 (6)
tree 78.37 (1) - 77.2 (1) 75.41 (4) - 75.15 (4) 74.22 (1) - 72.94 (1) 80.73 (1) - 80.49 (1) 77.41 (6) - 76.66 (6) 77.63 (1) - 77.23 (1)
RECALL
Area 1 - Area 1 hidden Area 2 - Area 2 hidden
oblique nadir combined oblique nadir combined
facade 47.64 (1) - 45.78 (1) 63.92 (4) - 62.69 (4) 72.38 (4) - 71.14 (4) 60.48 (6) - 56.97 (6) 68.72 (6) - 66.99 (6) 77.28 (6) - 75.63 (6)
window 53.75 (1) - 52.58 (1) 62.35 (4) - 61.28 (4) 78.64 (4) - 77.22 (4) 56.4 (6) - 54.72 (6) 67.99 (6) - 67.96 (6) 77.05 (6) - 77.71 (6)
door 40.86 (6) - 40.72 (6) 65.95 (4) - 66.12 (4) 68.76 (4) - 67.99 (4) 51.1 (6) - 54.05 (6) 59.37 (6) - 58.03 (6) 68.94 (6) - 68.34 (6)
roof 80.03 (1) - 76.27 (6) 83.82 (4) - 83.92 (4) 92.25 (4) - 91.65 (4) 80.08 (6) - 81.01 (6) 87.8 (6) - 88.35 (6) 91.57 (6) - 90.72 (6)
r. window 75.76 (1) - 84.01 (6) 77.75 (1) - 77.57 (1) 91.54 (4) - 93.07 (4) 70.23 (6) - 72.07 (6) 79.95 (6) - 84.97 (6) 85.78 (4) - 87.82 (6)
r. door 56.41 (4) - 71.34 (4) 63.3 (3) - 70.56 (3) 83.51 (4) - 92.79 (4) 60.73 (6) - 35.79 (6) 65.25 (6) - 42.42 (6) 65.8 (4) - 56.62 (6)
sidewalk 79.36 (6) - 77.95 (6) 90.37 (4) - 91.4 (4) 92.88 (4) - 92.56 (4) 84.66 (6) - 84.74 (6) 93.77 (6) - 93.31 (6) 94.71 (6) - 94.59 (6)
street 80.46 (6) - 79.17 (6) 92.97 (4) - 92.75 (4) 95.45 (4) - 95.68 (4) 77.66 (6) - 73.99 (6) 95.47 (4) - 95.05 (4) 96.31 (6) - 95.66 (6)
grass 81.14 (6) - 79.23 (6) 75.77 (1) - 74.63 (4) 88.45 (6) - 87.43 (6) 86.75 (1) - 84.09 (1) 95.08 (4) - 92.82 (4) 96.88 (6) - 95.67 (6)
tree 20.94 (6) - 21.65 (6) 25.82 (4) - 25.8 (6) 29.44 (2) - 28.76 (2) 15.03 (1) - 17.01 (1) 21.62 (1) - 22.82 (1) 26.58 (2) - 30.28 (2)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
738

the former in Area 1 and latter in Area 2. Fig. 6 also
includes the qualitative results of the point clouds ob-
tained for the combined dataset in Area 1 rendered un-
der the same configuration (e.g., point size, shading)
to make them comparable. From these results, we can
observe that the point cloud obtained with COLMAP
+ COLMAP (Fig. 6 (a)) is sharper than the one ob-
tained with COLMAP + OpenMVS (Fig. 6 (b)), in ac-
cordance with the precision values (74.89 and 27.93,
respectively). Moreover, there are also differences in
the completeness of the reconstructions: OpenMVG-i
+ OpenMVS (Fig. 6 (f)) and OpenMVG-g + Open-
MVS (Fig. 6 (d)) are denser than the rest, and they
also seem to be accurate. As before, the F score val-
ues confirm these observations, where they obtained
the highest scores (79.36 and 76.76).
Urban Category Centric Evaluation. Additionally,
in Table 3 we present a summary of the same mea-
surements calculated above (precision, recall and F
score) but this time per urban element category. This
summary shows three tables, one per measurement,
where each row has the results of a specific class (i.e.,
urban category) and each column corresponds to a
unique set of images. The result presented per cell in
the table is the maximum score obtained among the
six pipelines tested (see Fig. 4) and the pipeline that
generate it is shown in brackets. The results for the
complete area and the hidden one are presented in the
same cell, in that order, separated by a hyphen.
Analyzing the results that were obtained per class
across all the image sets available, we can observe
that the method that most frequently gets the maxi-
mum precision is COLMAP + COLMAP. Those re-
sults are different when looking at recall. In that case,
the pipeline OpenMVG-i + OpenMVS is the one that
more frequently achieves the highest scores. When
looking at the F score, we cannot identify a clear
predominant pipeline for each class. In all the sce-
narios, the class with lowest F score values is tree
and the results are really influenced by the low val-
ues of the recall. These results confirm the hypoth-
esis in (Zolanvari et al., 2019): trees in the parks of
the city can degrade the scores of the reconstructions.
We can also analyze the results related to the image
set under study. For example, with the combined set,
the pipeline with best performance in the majority of
classes is OpenMVG-g + OpenMVS in Area 1 and
OpenMVG-i + OpenMVS in Area 2. These results
are in accordance with the ones commented before,
which does not consider the class information (Ta-
ble 2).
There is a different case scenario when we look at
the results with the nadir images. In Area 2 the scores
from the OpenMVG-i + OpenMVS pipeline are the
highest in most of the classes but it is not the best
pipeline in the scene level evaluation. This is because
OpenMVG-i + OpenMVS is the best with the facade
class, with 11.10% of occupancy in the ground-truth
(see Table 1), but also in classes with 1.23% of occu-
pancy or less. However, OpenMVG-g + OpenMVS
achieves the highest scores in the classes grass, side-
walk and street (16.24%, 11.18% and 10.57% of oc-
cupancy, respectively) and they also have the high-
est scores among all the classes. Also, if we look
at the scores per class with the combined set in Area
1, COLMAP + COLMAP and OpenMVG-g + Open-
MVS obtain the highest F scores in the same num-
ber of classes. This time, the most populated classes
are the ones where COLMAP + COLMAP is better.
These results reflect the importance of incorporating
an object-category centric evaluation since a more de-
tailed analysis can be done. The results of the evalua-
tion per urban category in the hidden part (also de-
picted in Table 3) are different from the ones with
the whole area but still follow the same pattern. For
example, we can observe that the method that gener-
ates the best results per image set and class remains
constant for the majority of them except for the door
class. This is due to its small amount of samples.
Evaluation of Pipeline Components. We can
also observe that, in general, the pipelines that ob-
tained the best results are COLMAP + COLMAP,
OpenMVG-g + OpenMVS and OpenMVG-i + Open-
MVS. These results are in accordance with previ-
ous studies that used the same kind of metric, where
COLMAP + COLMAP and OpenMVG-i + Open-
MVS obtained the best results (Knapitsch et al.,
2017). In particular, in that study OpenMVG-g +
OpenMVS never has better results than COLMAP
+ COLMAP, but this situation is plausible in our
study given the different camera trajectories (aerial
grid configuration vs circle around an object), soft-
ware versions and parameters used. COLMAP used
as MVS is better than OpenMVS only if it is applied
after COLMAP SfM. Whereas OpenMVS is better
using the other SfM methods tested. This leads to the
necessity to test not only a particular MVS method
but a complete pipeline since it is going to be influ-
enced by: the results obtained in the SfM step, the
data conversion and preparation for the MVS step, as
well as memory and computing limitations. In this
benchmark, the results after each step are not evalu-
ated because, as explained in Section 4, we want to
enforce the creation of end-to-end solutions and we
do not focus on any particular part of a pipeline. Sim-
ilarly, specific processing times are not reported but
for all the pipelines it was in the order of hours due to
the quantity of images that had to be processed.
A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment
739

6 CONCLUSION
In this paper, we have presented a novel bench-
mark for evaluating image-based 3D reconstruction
pipelines with aerial images in urban environments.
The results obtained with the considered SfM+MVS
state-of-the-art pipelines are evaluated at scene level
and per urban category. This allows for further
analysis of the reconstructions (i.e., analysis of
the influence of each urban category in the scene
level scores) and it supports previous hypothesis
(e.g., parks can degrade the F score values in a
scene level evaluation) with quantitative measure-
ments. Also, we provide the means for evaluating
results in a hidden area to avoid fine tuning of
algorithms to the given ground truth. Furthermore,
we stimulate and support the evaluation of new
approaches for image-based 3D reconstruction as
we do not limit the evaluation to a specific stage
of the pipeline (e.g., MVS). Finally, to support the
progress of research in the community we provide
the dataset and an online evaluation platform at
https://v-sense.scss.tcd.ie/research/6dof/benchmark-
3D-reconstruction.
ACKNOWLEDGEMENTS
This publication has emanated from research con-
ducted with the financial support of Science Foun-
dation Ireland (SFI) under the Grant Number
15/RP/2776.
REFERENCES
Aanæs, H., Jensen, R. R., Vogiatzis, G., Tola, E., and Dahl,
A. B. (2016). Large-scale data for multiple-view stere-
opsis. International Journal of Computer Vision.
Barnes, C., Shechtman, E., Finkelstein, A., and Goldman,
D. B. (2009). Patchmatch: A randomized correspon-
dence algorithm for structural image editing. In ACM
Transactions on Graphics (ToG). ACM.
Bosch, M., Foster, K., Christie, G., Wang, S., Hager, G. D.,
and Brown, M. (2019). Semantic stereo for incidental
satellite images. In WACV 2019. IEEE.
Furukawa, Y. and Ponce, J. (2010). Accurate, dense, and ro-
bust multiview stereopsis. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge University Press.
Jancosek, M. and Pajdla, T. (2011). Multi-view reconstruc-
tion preserving weakly-supported surfaces. In CVPR
2011. IEEE.
Knapitsch, A., Park, J., Zhou, Q.-Y., and Koltun, V. (2017).
Tanks and temples: Benchmarking large-scale scene
reconstruction. ACM Transactions on Graphics.
Laefer, D. F., Abuwarda, S., Vo, A.-V., Truong-Hong, L.,
and Gharibi, H. (2015). 2015 aerial laser and pho-
togrammetry survey of dublin city collection record.
Menze, M. and Geiger, A. (2015). Object scene flow for
autonomous vehicles. In CVPR 2015.
Moulon, P., Monasse, P., and Marlet, R. (2012). Adaptive
structure from motion with a contrario model estima-
tion. In ACCV 2012. Springer Berlin Heidelberg.
Moulon, P., Monasse, P., and Marlet, R. (2013). Global fu-
sion of relative motions for robust, accurate and scal-
able structure from motion. In ICCV 2013.
Munoz, D., Bagnell, J. A., Vandapel, N., and Hebert, M.
(2009). Contextual classification with functional max-
margin markov networks. In CVPR 2009.
¨
Ozdemir, E., Toschi, I., and Remondino, F. (2019). A multi-
purpose benchmark for photogrammetric urban 3d re-
construction in a controlled environment.
Pag
´
es, R., Amplianitis, K., Monaghan, D., Ond
ˇ
rej, J., and
Smoli
´
c, A. (2018). Affordable content creation for
free-viewpoint video and vr/ar applications. Journal
of Visual Communication and Image Representation.
Rottensteiner, F., Sohn, G., Gerke, M., Wegner, J. D., Bre-
itkopf, U., and Jung, J. (2014). Results of the isprs
benchmark on urban object detection and 3d building
reconstruction. ISPRS journal of photogrammetry and
remote sensing.
Ruano, S., Cuevas, C., Gallego, G., and Garc
´
ıa, N. (2017).
Augmented reality tool for the situational awareness
improvement of uav operators. Sensors.
Ruano, S., Gallego, G., Cuevas, C., and Garc
´
ıa, N. (2014).
Aerial video georegistration using terrain models from
dense and coherent stereo matching. In Geospatial In-
foFusion and Video Analytics IV; and Motion Imagery
for ISR and Situational Awareness II. International So-
ciety for Optics and Photonics.
Sch
¨
onberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In CVPR 2016.
Sch
¨
onberger, J. L., Zheng, E., Pollefeys, M., and Frahm, J.-
M. (2016). Pixelwise view selection for unstructured
multi-view stereo. In ECCV 2016. Springer.
Schops, T., Schonberger, J. L., Galliani, S., Sattler, T.,
Schindler, K., Pollefeys, M., and Geiger, A. (2017).
A multi-view stereo benchmark with high-resolution
images and multi-camera videos. In CVPR 2017.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A comparison and evaluation of
multi-view stereo reconstruction algorithms. In CVPR
2006.
Serna, A., Marcotegui, B., Goulette, F., and Deschaud, J.-
E. (2014). Paris-rue-madame database: a 3d mobile
laser scanner dataset for benchmarking urban detec-
tion, segmentation and classification methods.
Snavely, N., Seitz, S. M., and Szeliski, R. (2008). Modeling
the world from internet photo collections. Interna-
tional Journal of Computer Vision.
Stathopoulou, E. K., Welponer, M., and Remondino, F.
(2019). Open-source image-based 3d reconstruction
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
740

pipelines: review, comparison and evaluation. The
International Archives of Photogrammetry, Remote
Sensing and Spatial Information Sciences.
Strecha, C., Von Hansen, W., Van Gool, L., Fua, P., and
Thoennessen, U. (2008). On benchmarking camera
calibration and multi-view stereo for high resolution
imagery. In CVPR 2008.
Sweeney, C., Hollerer, T., and Turk, M. (2015). Theia:
A fast and scalable structure-from-motion library. In
Proceedings of the ACM International Conference on
Multimedia, pages 693–696. ACM.
Vallet, B., Br
´
edif, M., Serna, A., Marcotegui, B., and Papar-
oditis, N. (2015). Terramobilita/iqmulus urban point
cloud analysis benchmark. Computers & Graphics.
Zhang, L., Li, Z., Li, A., and Liu, F. (2018). Large-scale
urban point cloud labeling and reconstruction. ISPRS
Journal of Photogrammetry and Remote Sensing.
Zolanvari, S., Ruano, S., Rana, A., Cummins, A., da Silva,
R. E., Rahbar, M., and Smolic, A. (2019). Dublincity:
Annotated lidar point cloud and its applications. 30th
BMVC.
A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment
741
