
Embedded Features for 1D CNN-based Action Recognition
on Depth Maps
Jacek Trelinski and Bogdan Kwolek
AGH University of Science and Technology, 30 Mickiewicza, 30-059 Krakow, Poland
Keywords:
Action Recognition on Depth Maps, Convolutional Neural Networks, Feature Embedding.
Abstract:
In this paper we present an algorithm for human action recognition using only depth maps. A convolutional
autoencoder and Siamese neural network are trained to learn embedded features, encapsulating the content
of single depth maps. Afterwards, statistical features and multichannel 1D CNN features are extracted on
multivariate time-series of such embedded features to represent actions on depth map sequences. The action
recognition is achieved by voting in an ensemble of one-vs-all weak classifiers. We demonstrate experimentally
that the proposed algorithm achieves competitive results on UTD-MHAD dataset and outperforms by a large
margin the best algorithms on 3D Human-Object Interaction Set (SYSU 3DHOI).
1 INTRODUCTION
Human action recognition (HAR) can be defined as
capability of determining whether a given action oc-
curred in image or depth sequence. It has been inten-
sively studied in the last decade, especially because
this is a challenging problem, but also due to possible
applications that can benefit from it. However, due to
several difficulties, including non-rigid shape of the
humans, intra-class variations, viewpoint variations,
occlusions and plenty another challenges and environ-
mental complexities, the current algorithms have poor
performance in comparison to human ability to rec-
ognize and to understand human motions and actions
(Liang and Zheng, 2015; Wang et al., 2020).
Prior to the release of low-cost depth cameras, such
as Microsoft Kinect, research has concentrated on
learning and recognizing actions using RGB datasets
and video repositories. Having on regard that Kinect
motion sensor is capable of extracting the depth maps
in poor illumination conditions or even in darkness,
considerable attention is devoted to algorithms oper-
ating on depth maps. When action performers are
captured using 2D cameras then one dimension is lost
during the acquisition, which causes the loss of im-
portant information. For the same reason, 3D-based
approaches provide higher accuracy than 2D-based
approaches. Most of the current approaches to action
recognition on depth maps are based on the skeleton
(Ren et al., 2020). The number of approaches, rely-
ing on depth maps only, particularly deep learning-
based is very limited (Wang et al., 2020). Despite
that skeleton-based methods usually achieve better re-
sults in comparison to algorithms using only depth
maps, they can fail in many scenarios due to skeleton
extraction failure.
In order to stimulate the research as well as to
facilitate development and evaluation of new algo-
rithms, several RGB-D benchmark datasets have been
acquired in the last decades (Li et al., 2010; Chen et al.,
2015; Hu et al., 2015). Currently available datasets
for 3D action recognition usually have 10, 20, 27 or
a little more categories of actions, which were per-
formed by a dozen or several dozen performers, and
each action has been repeated a few times. The MSR
Action 3D dataset (Li et al., 2010), is one of the most
frequently used benchmarks in the research as well
as in evaluation of the algorithms. The recently intro-
duced UTD-MHAD dataset (Chen et al., 2015) has
four types of data modalities: RGB, depth, skeleton
joint positions, and the inertial sensor signals and it is
considered as a valuable benchmark data. In SYSU 3D
Human-Object Interaction (3DHOI) dataset (Hu et al.,
2015) each action involves a kind of human-object
interactions. Deep learning-based methods for human
action recognition require a huge amount of image or
depth map sequences for training. Collecting and an-
notating huge amounts of data is immensely laborious
and necessitates appropriate equipment and computa-
tional resources. Due to limited number of depth se-
quences in currently available RGB-D datasets, which
is typically smaller than one thousand, the recogni-
536
Trelinski, J. and Kwolek, B.
Embedded Features for 1D CNN-based Action Recognition on Depth Maps.
DOI: 10.5220/0010340105360543
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
536-543
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tion of actions on the basis of 3D depth maps is very
challenging.
Traditional approaches to activity recognition on
depth maps rely on the handcrafted feature-based rep-
resentations (Yang et al., 2012; Xia and Aggarwal,
2013). In contrast to handcrafted representation-based
approaches, in which actions are represented by engi-
neered features, learning-based algorithms are capable
of discovering the most informative features automat-
ically from the raw data. Such deep learning-based
methods permit processing images/videos in their raw
forms and thus they are capable of automating the
process of feature extraction and classification. These
methods employ trainable feature extractors and com-
putational models with multiple layers for action rep-
resentation and recognition.
In this work we demonstrate experimentally that
despite the limited amount of training data, i.e. action
sequences in currently available datasets, it is possi-
ble to learn features with highly discriminative power.
A convolutional autoencoder and Siamese neural net-
work have been trained to extract features on single
depth maps. Afterwards, statistical features and multi-
channel 1D CNN features were extracted on multivari-
ate time-series of features to represent actions on depth
map sequences. As far as we know, the multi-channel
1D convolutional neural networks (Zheng et al., 2014;
Zheng et al., 2016) have not been utlized in human
action recognition. The recognition of the actions is
done by a voting-based ensemble operating on one-hot
encodings of one-vs-all weak classifiers.
2 THE ALGORITHM
A characteristic feature of the proposed approach is
that it does not require skeleton. Thanks to using depth
maps only, our algorithm can be employed on depth
data provided by stereo cameras, which can deliver the
depth data for persons being at larger distances to the
sensors. It is well known that the Kinect sensor fails to
estimate the skeleton in several scenarios. In the next
Section, we demonstrate experimentally that despite
no use of the skeleton, our algorithm achieves better
accuracies than several skeleton-based algorithms. In
the proposed approach, various features are learned in
different domains, like single depth map, time-series
of embedded features, and final decision is taken on
the basis of voting of one-vs-all weak classifiers.
The algorithm has been evaluated on MSR Action
3D, UTD-MHAD and SYSU 3DHOI datasets. Since
in SYSU 3DHOI dataset the performers are not ex-
tracted from depth maps, we extracted the subjects.
For each depth map we determined a window sur-
rounding the person, which has then been scaled to the
required input shape.
In Subsection 2.1 we present features describing
the person’s shape in single depth maps. Afterwards,
in Subsection 2.2 we present features representing
multivariate time-series. In Subsection 2.3 we discuss
multi-class classifiers to construct ensemble. Finally,
in Subsection 2.4 we describe the ensemble.
2.1 Embedded Frame-features
Since current datasets for depth-based action recogni-
tion have insufficient number of sequences to learn
deep models with adequate generalization capabil-
ities, we propose CNNs operating on single depth
maps or pairs of depth maps to extract informative
frame-features. Because the number of frames in the
current benchmark datasets for RGBD-based action
recognition is pretty large, deep feature representations
can be learned. Given an input depth map sequence
x = {x
1
, x
2
, . . . , x
T
}
, we encode each depth map
x
i
us-
ing a CNN backbone
f
into a feature
f (x
i
)
, which
results in a sequence of embedded feature vectors
f (x) = { f (x
1
), f (x
2
), . . . , f (x
T
)}
. The dimension of
such embedding for a depth map sequence is
T × D
f
,
where
D
f
is size of the embedded vector. In the next
subsection we detail how frame-features were embed-
ded without supervision using a convolutional autoen-
coder. Afterwards, we explain how frame-features
were calculated using a Siamese neural network.
2.1.1 Unsupervised Extraction of
Frame-features using Convolutional
Autoencoder
An autoencoder is a type of artificial neural network
that projects a high-dimensional input into a latent
low-dimensional code (encoder), and then carries out
a reconstruction of the input using such a latent code
(the decoder) (Hinton and Salakhutdinov, 2006). To
achieve this the autoencoder learns a hidden represen-
tation for a set of input data, typically through com-
pression (dimensionality reduction), by learning to
ignore less informative information. This means that
the autoencoder tries to generate from such a reduced
encoding an output representation that is close as pos-
sible to its input. When the hidden representation uses
fewer dimensions than the input, the encoder carries
out dimensionality reduction. An autoencoder consists
of an internal (hidden) layer that stores a compressed
representation of the input, as well as an encoder that
maps the input into the code, and a decoder that maps
the code to a reconstruction of the original input. The
encoder compresses the input and produces the code,
whereas the decoder reconstructs the input using only
Embedded Features for 1D CNN-based Action Recognition on Depth Maps
537

this code. Learning to replicate its input at its output is
achieved by learning a reduction side and a reconstruct-
ing side. Autoencoders are considered as unsupervised
learning technique since no explicit labels are needed
to train them. Once such a representation with reduced
dimensionality is learned, it can then be taken as input
to a supervised algorithm that can then be trained on
the basis of a smaller labeled data subset.
We extracted frame-features using encoder/decoder
paradigm proposed in (Masci et al., 2011). We imple-
mented a convolutional autoencoder (CAE) in which
the input depth map is first transformed into a lower
dimensional representation through successive con-
volution operations and rectified linear unit (ReLU)
activations and afterwards expanded back to its orig-
inal size using deconvolution operations. The mean
squared error, which measures how close the recon-
structed input is to the original input has been used
as the loss function in the unsupervised learning. The
network has been trained using Adam optimizer with
learning rate set to 0.001. After training, the decoding
layers of the network were excluded from the convo-
lutional autoencoder. The network trained in such a
way has been used to extract low dimensional frame-
features. The depth maps acquired by the sensor were
projected two 2D orthogonal Cartesian planes to rep-
resent top and side view of the maps. On training
subsets we trained a single CAE for all classes. The
convolutional autoencoder has been trained on depth
maps of size 3 × 64 × 64.
The CAE network architecture is shown in Fig. 1.
The network consists of two encoding layers and two
associated decoding layers. The size of depth map
embedding is equal to 100.
Figure 1: Architecture of convolutional autoencoder.
2.1.2 Semi-supervised Learning of Frame
Similarity
Siamese Neural Networks (SNNs) are a class of neu-
ral networks that contain multiple instances of the
same model and share same architecture and weights
(Chopra et al., 2005). In contrast to MLPs that utilize
loss functions calculating errors between outputs and
target values, the SNNs use objectives that compare
the feature vectors of pairs of the exemplars. They
have been used for dimensionality reduction (Hadsell
et al., 2006) as well for one-shot image classification
(Koch et al., 2015), i.e. recognition on the basis of one
training example per class. They are trained with a
collection of sample pairs with the same or different
categories. Sharing weights across the sub-networks
results in smaller number of learned parameters. Thus,
this architecture shows its strength when it has to learn
on the basis of limited data.
In the proposed approach a separate Siamese neural
network is trained for each action class to extract fea-
tures distinguishing a given class from all remaining
classes, same as in one-vs-all multi-class classification.
In other words, each Siamese neural network is trained
to decide whether the considered depth map belongs
to the class for which the network had been trained or
to one of the remaining classes.
The central idea behind SNNs is to learn an em-
bedding, where similar image pairs are close to each
other and dissimilar image pairs are separated by a
distance that depends on a parameter called margin.
Let us assume that our aim is to learn a SNN on a
training set
{x
i
, y
i
}
T
i=1
, where
x
i
∈ R
n
and
y
i
are class
labels. The Siamese network produces a feature em-
bedding
f (x, θ
f
)
that is defined as
f : R
n
× R
k
→ R
m
,
where
θ
f
∈ R
k
stands for parameters of the network.
The aim of the learning is to seek for the parameter
vector
θ
f
such that the embedding produced through
f
has desirable properties, and particularly it places
similar examples nearby. The SNN can extract infor-
mation from the available data and determine such
an embedding without requiring specific information
about the categories. Thus, learning the Siamese net-
work is achieved in a weakly-supervised scheme using
only pairs of data instances labeled as matching or
non-matching.
Let us consider a pair of images
(I
p
, I
q
)
that con-
tains person performing the same action, and a pair of
images
(I
p
, I
r
)
, which belong to different action cate-
gories. The Siamese neural network maps such image
pairs into embedded space
(x
p
, x
q
, x
r
)
such
x
p
and
x
q
are close, whereas
x
p
and
x
r
are further apart. Such
an embedding can be achieved on the basis of a con-
trastive loss function
L
, which expresses how well the
function
f
is capable of placing similar image repre-
sentations in the close proximity and keep dissimilar
image representations distant. The contrastive loss
function L(θ) can be expressed as follows:
L(θ) =
∑
(x
p
,x
q
)
L
q
(x
p
, x
q
)
| {z }
penalty term
for similar images
+
∑
(x
p
,x
r
)
L
r
(x
p
, x
r
)
| {z }
penalty term
for dissimilar images
(1)
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
538

where
L
q
(x
p
, x
q
) =
x
p
− x
q
2
2
L
r
(x
p
, x
r
) = max (0, m −
k
x
p
− x
r
k
2
)
2
(2)
The penalty term
L
q
penalizes the pair
(x
p
, x
q
)
that is
too apart, whereas
L
r
penalizes the pair
(x
p
, x
r
)
that
is closer than a margin
m
. Thus, dissimilar image
pairs contribute to the loss function if their distances
are within the margin
m
. Given the label
y
indicating
whether the images are similar or dissimilar the margin-
based loss function can be expressed as follows:
L(θ, x
i
, x
j
) = y
f (x
i
) − f (x
j
)
2
2
+ (1 − y)max(0, m −
f (x
i
) − f (x
j
)
2
)
2
(3)
where function
f
performs a forward propagation
through the Siamese sub-network. The loss function
penalizes positive pairs by the squared Euclidean dis-
tances and negative pairs by the squared difference
between the margin
m
and Euclidean distance for pairs
having distance less than the margin
m
. Figure 2 con-
tains diagram of the utilized Siamese neural network.
The network has been trained using Adam optimizer
with learning rate set to 0.00006.
Figure 2: Architecture of Siamese neural network.
2.2 Features of Time-series
On the basis of depth map sequences representing hu-
man actions the neural networks that were discussed
above produce multivariate time-series. Having on
regard that depth map sequences differ in length, such
variable length time-series were interpolated to a com-
mon length. In the next two Subsections we explain
how features for multivariate time-series are deter-
mined.
2.2.1 Statistical Features of Time-series
For each multivariate time-series of features, which
were extracted by the convolutional autoencoder, we
calculate statistical features. Such statistical features
represent actions. For each time-series feature we cal-
culate four features: average, standard deviation, skew-
ness and correlation of the time-series with time. The
motivation of using skewness was to include a param-
eter describing asymmetry in random variable’s proba-
bility distribution with respect to normal distribution.
The multivariate time-series are of size
4 × 100 = 400
.
2.2.2 Multi-channel, Temporal 1D CNN
In multi-channel, temporal CNNs (MC CNNs) the
1D convolutions are applied in the temporal domain.
In this work, the time-series (TS) of frame-features
that were extracted by the Siamese neural network
have been used to train multi-channels 1D CNNs. The
number of channels is equal to 64, see Fig. 2. The
multivariate time-series were interpolated to the length
equal to 100. Cubic-spline algorithm has been utilized
to interpolate the TS to such a common length.
The first layer of the MC CNN is a filter (feature
detector) operating in time domain. Having on regard
that the amount of the training data in current datasets
for depth-based action recognition is quite small, the
neural network consists of two convolutional layers,
each with
8 × 1
filter,
4 × 1
and
2 × 1
max pools, re-
spectively, see Fig. 3. The number of neurons in the
dense layer is equal to 100. For each Siamese time-
series of features a separate multichannel 1D CNN has
been trained. Such approach is due to redundant depth
maps, i.e. the same human poses in different actions.
The number of output neurons is equal to number of
the classes. Nesterov Accelerated Gradient (Nesterov-
Momentum) has been used to train the network, in
1000 iterations, with momentum set to 0.9, dropout
equal to 0.5, learning rate equal to 0.001, L1 parameter
set to 0.001. After the training, the output of the dense
layer has been used to extract the features.
2.3 Multi-class Classifiers to Construct
Ensemble
The features described in Subsections 2.2.1 and 2.2.2
were used to train multi-class classifiers with softmax
encoding, see Fig. 4. Having on regard that for each
class an action-specific classifier to extract depth map
features has been trained, the number of such classi-
fiers is equal to the number of actions to be recognized.
The convolutional Autoencoder (Subsect. 2.1.1) oper-
ating on sequences of depth maps delivers time-series
Embedded Features for 1D CNN-based Action Recognition on Depth Maps
539
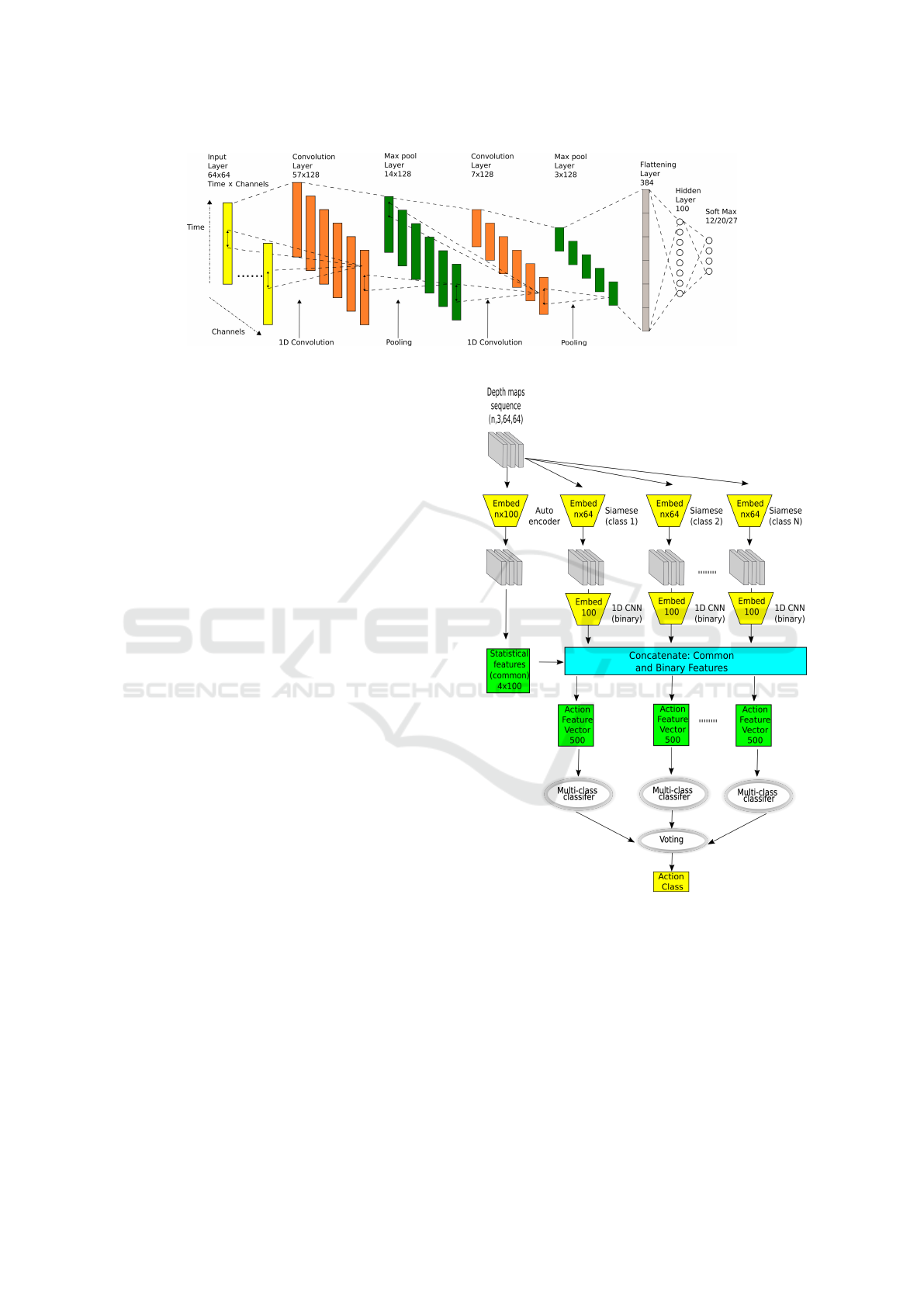
Figure 3: Flowchart of the multi-channel CNN for multivariate time-series modeling.
of AE-based frame-features, on which we determine
statistical temporal features (Subsect. 2.2.1). The base
networks of the Siamese (Subsect. 2.1.2) operating on
sequences of depth maps deliver time-series of fea-
tures (one feature vector per frame), which are further
processed by the multi-channel, temporal neural net-
work (Subsect. 2.2.2). It delivers feature vectors of
size 100, see Fig. 4, which are then concatenated with
statistical features of size 400. The multi-class clas-
sifiers delivering at the outputs the softmax-encoded
class probability distributions are finally used in an
ensemble responsible for classification of actions.
2.4 Ensemble of Classifiers
Figure 4 depicts the ensemble for action classification.
The final decision is calculated on the basis of voting
of the classifiers. As we can see, the statistical features
that are common for all actions are concatenated with
class-specific features, and then used to train multi-
class classifiers.
3 EXPERIMENTAL RESULTS
The proposed algorithm has been evaluated on three
publicly available benchmark datasets: MSR Ac-
tion 3D dataset (Li et al., 2010), UTD-MHAD dataset
(Chen et al., 2015) and SYSU 3D Human-Object In-
teraction Set (SYSU 3DHOI) (Hu et al., 2015). The
datasets were selected having on regard their frequent
use by action recognition community in the evalua-
tions and algorithm comparisons.
In experiments and evaluations with MSR Ac-
tion 3D dataset, 557 sequences were investigated. In
the evaluation of the algorithm, half of the subjects
were utilized for the training, and the rest for the test-
ing, which is dissimilar to evaluation protocols based
on AS1, AS2 and AS3 data splits and averaging the
classification accuracies over such data splits. It is also
worth mentioning that the classification performances
Figure 4: Ensemble operating on features extracted by con-
volutional autoencoder, concatenated with class-specific fea-
tures that were extracted by Siamese neural networks.
achieved in the selected setting are lower in compari-
son to classification performances, which are achieved
on AS1, AS2, AS3 setting due to bigger variations
across the same actions performed by different per-
formers. The evaluations were performed according to
the cross-subject evaluation protocol (Xia and Aggar-
wal, 2013; Wang et al., 2016) The discussed evaluation
scheme is different from the procedure employed in
(Xia et al., 2012), in which more performers were in
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
540
the training subset.
The UTD-MHAD dataset contains 27 different ac-
tions performed by eight subjects (four females and
four males). All actions were performed in an indoor
environment with a fixed background. Each performer
repeated each action four times. The dataset consists
of 861 data sequences and it was acquired using the
Kinect sensor and a wearable inertial sensor.
The SYSU 3D Human-Object Interaction (3DHOI)
dataset was recorded by the Kinect sensor and com-
prises 480 RGBD sequences from 12 action categories,
including calling with cell phone, playing with a cell
phone, pouring, drinking, wearing backpack, packing
a backpack, sitting on a chair, moving a chair, taking
something from a wallet, taking out a wallet, mop-
ping and sweeping. Actions were performed by 40
subjects. Each action involves a kind of human-object
interactions. Some motions actions are quite similar
at the beginning since the subjects operate or interact
with the same objects, or actions start with the same
sub-action, such as standing still. The above men-
tioned issues make this dataset challenging following
the evaluation setting in (Hu et al., 2019), in which
depth map sequences with the first 20 subjects were
used for training and the rest for testing.
Table 1 presents experimental results that were
achieved on the MSR Action 3D dataset. As we can
notice, the best results were achieved using logistic
regression classifiers and hard voting in the ensemble.
Table 1: Recognition performance on MSR Action 3D
dataset (LR - logistic regression, SVM - Support Vector
Machine, H - hard voting, S - soft voting).
class. vot. Accuracy
Preci-
sion
Recall
F1-
score
LR S 0.8836 0.8865 0.8836 0.8716
LR H 0.9018 0.9076 0.9018 0.8903
SVM S 0.8909 0.8889 0.8909 0.8833
SVM H 0.8691 0.8704 0.8691 0.8621
Table 2 illustrates the classification performance of
the proposed method in comparison to previous depth-
based methods on the MSR Action 3D dataset. The
classification performance of the proposed framework
has been determined using the cross-subject evaluation
(Wu, 2012), where subjects 1, 3, 5, 7, and 9 were em-
ployed for training and subjects 2, 4, 6, 8, and 10 were
utilized for testing. As we can notice, the proposed
method achieves better classification accuracy than
recently proposed method (Wang et al., 2018), and
it has worse performance in comparison to recently
proposed method (Bulbul et al., 2019) (Split I). One
of the main reasons that our method achieves worse
results than (Bulbul et al., 2019) is limited amount of
training samples in the MSR Action 3D dataset. In
our methods features extracted by CAE and Siamese
neural networks are employed, whereas the method
mentioned above is based on handcrafted features.
Table 2: Comparative recognition performance of the pro-
posed method with recent algorithms on MSR Action 3D
dataset.
Method Split
Modality
Acc.
[%]
3DCNN (Wang et al., 2018) Split II depth
84.07
GLAC (Bulbul et al., 2019) Split I depth
94.50
Proposed Method Split I depth
90.18
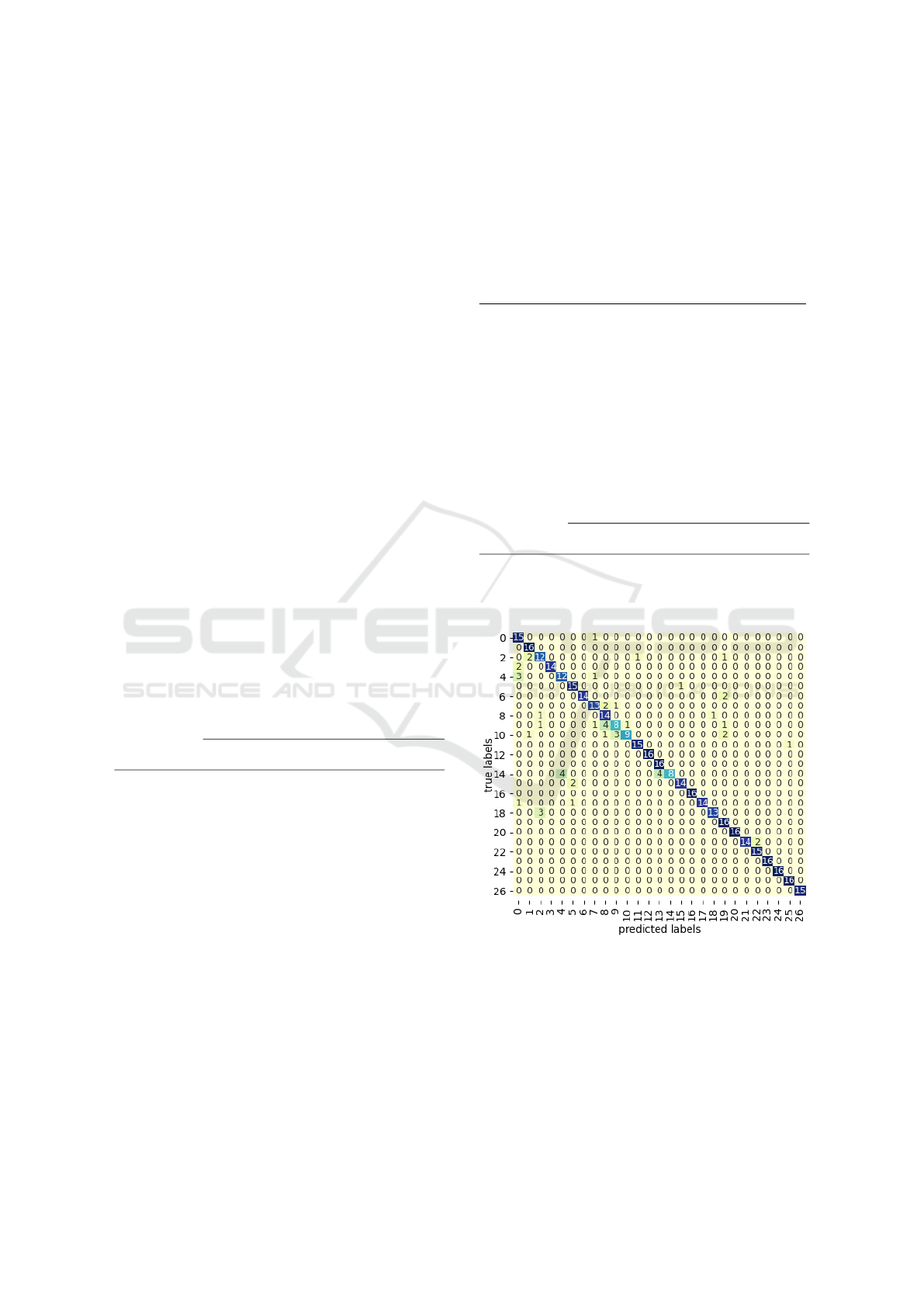
Table 3 presents experimental results that were
achieved on the UTD-MHAD dataset. As we can
observe, the best results were achieved using logistic
regression classifiers and hard voting in the ensemble.
Figure 5 depicts the confusion matrix.
Table 3: Recognition performance on UTD-MHAD dataset
(LR - logistic regression, SVM - Support Vector Machine, H
- hard voting, S - soft voting).
class. vot. Accuracy
Preci-
sion
Recall
F1-
score
LR S 0.8767 0.8912 0.8767 0.8720
LR H 0.8791 0.8902 0.8791 0.8760
SVM S 0.8744 0.8921 0.8744 0.8724
SVM H 0.8628 0.8801 0.8628 0.8621
Figure 5: Confusion matrix on UTD-MHAD dataset.
Table 4 presents the recognition performance of
the proposed method compared with previous meth-
ods. Most of current methods for action recognition
on UTD-MHAD dataset are based on skeleton data.
Methods based on skeleton modality usually achieve
better results in comparison to methods relying on
depth data only. Despite the fact that our method
is based on depth modality, we evoked the recent
Embedded Features for 1D CNN-based Action Recognition on Depth Maps
541
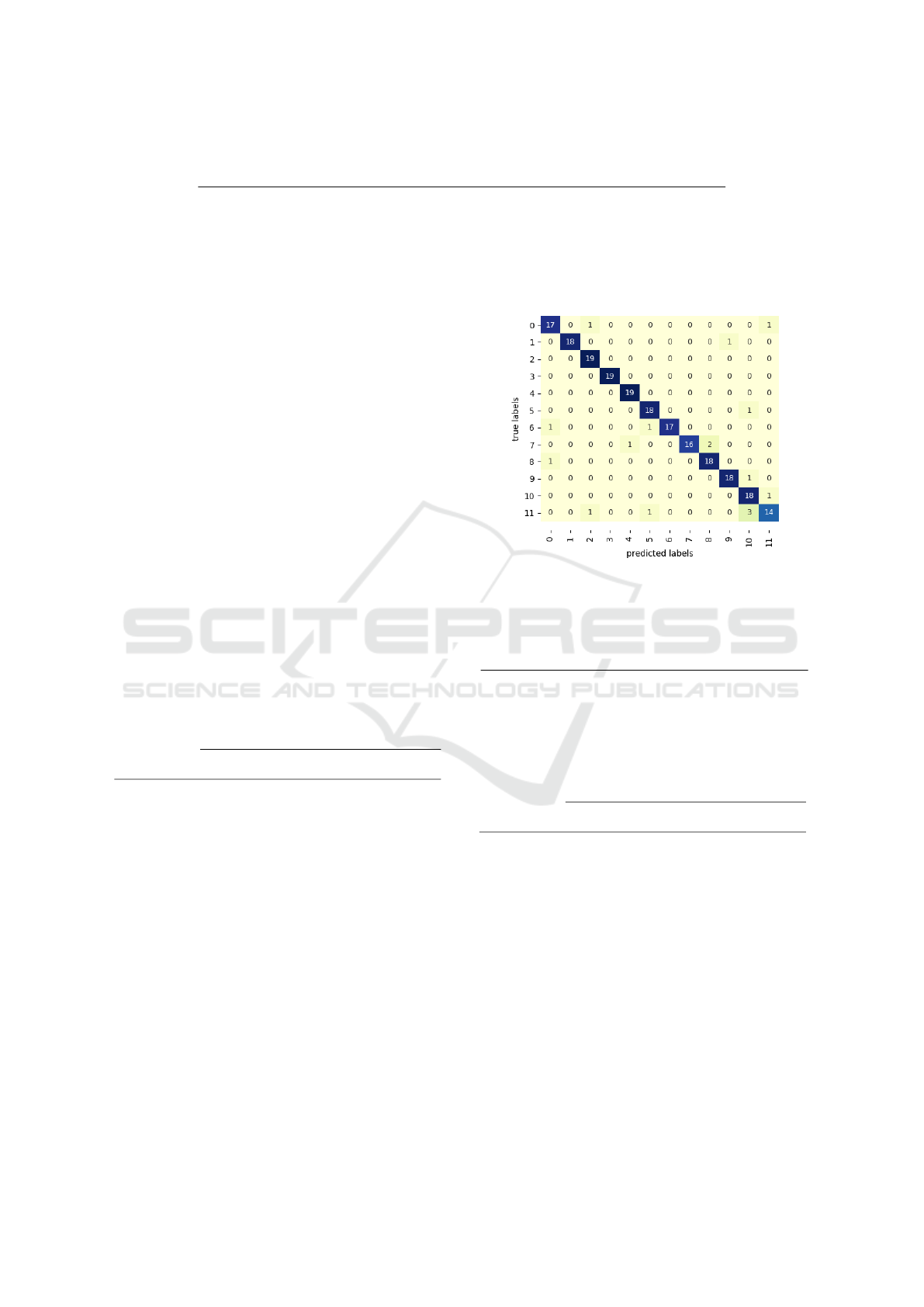
Table 4: Comparative recognition performance of the proposed method with recent algorithms on MHAD dataset.
Method Modality Accuracy [%]
JTM (Wang et al., 2018) skeleton 85.81
SOS (Hou et al., 2018) skeleton 86.97
Kinect & inertial (Chen et al., 2015) skeleton 79.10
Struct. joint (Wang et al., 2017) skeleton 86.81
Struct. SzDDI (Wang et al., 2017) skeleton 89.04
WHDMMs+ConvNets (Wang et al., 2016)(Wang et al., 2017) depth 73.95
Proposed Method depth 87.91
skeleton-based methods to show that it outperforms
many of them. Our method is considerably better
than the WHDMM+3DConvNets method that employs
weighted hierarchical depth motion maps (WHDMMs)
and three 3D ConvNets. The WHDMMs are employed
at several temporal scales to encode spatiotemporal
motion patterns of actions into 2D spatial structures.
In order to provide sufficient amount of training data,
the 3D points are rotated and then used to synthesize
new exemplars. In contrast, our algorithm extracts
deep features on single frames, and determines fea-
tures from time-series of such deep features, which
are concatenated with handcrafted features. The im-
proved performance of our method may suggest that
the proposed method has better viewpoint tolerance
in comparison to depth-based algorithms, including
(Wang et al., 2016).
Table 5 illustrates results that were achieved on
the 3DHOI dataset. As we can observe, the best re-
sults were achieved using SVM and hard voting in the
ensemble. Figure 6 illustrates the confusion matrix.
Table 5: Recognition performance on SYSU 3DHOI dataset
(LR - logistic regression, SVM - Support Vector Machine, H
- hard voting, S - soft voting).
class. vot. Accuracy
Preci-
sion
Recall
F1-
score
LR S 0.8289 0.8294 0.8289 0.8273
LR H 0.8640 0.8643 0.8640 0.8621
SVM S 0.9035 0.9077 0.9035 0.9039
SVM H 0.9254 0.9295 0.9254 0.9251
Table 6 presents results achieved by recent algo-
rithms on 3DHOI dataset in comparison to results
achieved by our algorithm. As we can observe, our
algorithm achieves the best results on this challenging
dataset. It is worth noting that method (Wang et al.,
2019) relies on depth and skeleton modalities, whereas
(Hu et al., 2019) additionally utilizes RGB images
jointly with the skeleton data.
We also performed evaluations of a modified algo-
rithm in which instead of statistical features of time
series we employed features extracted by a multi chan-
nel 1D CNN. As we can notice in Tab. 7 slightly worse
results have been achieved by such an algorithm on the
3DHOI dataset. The results on two remaining datasets
were also not better.
Figure 6: Confusion matrix on 3DHOI dataset.
Table 6: Comparative recognition performance of the pro-
posed method with recent algorithms on 3DHOI dataset.
Method Modality Acc.
[%]
MSRNN (Hu et al., 2019) depth+RGB+skel.
79.58
PTS (Wang et al., 2019) depth+skeleton
87.92
Proposed Method depth 92.54
Table 7: Recognition performance on SYSU 3DHOI dataset
achieved by algorithm with 1D CNN-based features instead
of statistical features (LR - logistic regression, SVM - Sup-
port Vector Machine, H - hard voting, S - soft voting).
class. vot. Accuracy
Preci-
sion
Recall
F1-
score
LR S 0.8684 0.8687 0.8684 0.8678
LR H 0.8509 0.8568 0.8509 0.8488
SVM S 0.9035 0.9091 0.9035 0.9039
SVM H 0.8026 0.8104 0.8026 0.8023
4 CONCLUSIONS
In this paper we presented a novel algorithm for hu-
man action recognition on depth maps. The novelty
comprises the use of convolutional autoencoder and
Siamese network to learn frame-features and then
multi-channel 1D CNNs to extract informative features
for depth map sequences. In order to cope with depth
map sequences with redundant depth maps, in which
the human pose are the same in some sub-sequences
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
542

for different classes we trained class-specific Siamese
neural networks and corresponding multichannel 1D
CNNs. The final decision is taken on the basis of the
voting. The presented algorithm achieves promising
results in comparison to recent algorithms. It achieves
considerable gain in recognition accuracy on challeng-
ing SYSU 3DHOI dataset. We demonstrated experi-
mentally that our algorithm outperforms several recent
skeleton-based methods.
ACKNOWLEDGEMENTS
This work was supported by Polish National
Science Center (NCN) under a research grant
2017/27/B/ST6/01743.
REFERENCES
Bulbul, M., Islam, S., and Ali, H. (2019). 3D human action
analysis and recognition through GLAC descriptor on
2D motion and static posture images. Multim. Tools
Appl., 78(15).
Chen, C., Jafari, R., and Kehtarnavaz, N. (2015). UTD-
MHAD: A multimodal dataset for human action recog-
nition utilizing a depth camera and a wearable inertial
sensor. In IEEE ICIP, pages 168–172.
Chopra, S., Hadsell, R., and LeCun, Y. (2005). Learning a
similarity metric discriminatively, with application to
face verification. In CVPR, pages 539–546.
Hadsell, R., Chopra, S., and LeCun, Y. (2006). Dimension-
ality reduction by learning an invariant mapping. In
CVPR, pages 1735–1742. IEEE Comp. Society.
Hinton, G. and Salakhutdinov, R. (2006). Reducing the
dimensionality of data with neural networks. Science,
313(5786):504 – 507.
Hou, Y., Li, Z., Wang, P., and Li, W. (2018). Skeleton optical
spectra-based action recognition using convolutional
neural networks. IEEE Trans. CSVT, 28(3):807–811.
Hu, J., Zheng, W., Lai, J., and Zhang, J. (2015). Jointly
learning heterogeneous features for RGB-D activity
recognition. In CVPR, pages 5344–5352.
Hu, J., Zheng, W., Ma, L., Wang, G., Lai, J., and Zhang,
J. (2019). Early action prediction by soft regression.
IEEE Trans. PAMI, 41(11):2568–2583.
Koch, G., Zemel, R., and Salakhutdinov, R. (2015). Siamese
neural networks for one-shot image recognition. In
ICML Deep Learning Workshop. vol. 2.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3D points. In CVPR Workshops,
pages 9–14.
Liang, B. and Zheng, L. (2015). A survey on human ac-
tion recognition using depth sensors. In Int. Conf. on
Digital Image Comp.: Techn. and Appl., pages 1–8.
Masci, J., Meier, U., Cire
s¸
an, D., and Schmidhuber, J. (2011).
Stacked convolutional auto-encoders for hierarchical
feature extraction. In ICANN, vol. I, pages 52–59.
Ren, B., Liu, M., Ding, R., and Liu, H. (2020). A survey on
3D skeleton-based action recognition using learning
method. arXiv, 2002.05907.
Wang, L., Huynh, D. Q., and Koniusz, P. (2020). A compar-
ative review of recent Kinect-based action recognition
algorithms. IEEE Trans. Image Process., 29:15–28.
Wang, P., Li, W., Gao, Z., Zhang, J., Tang, C., and Ogunbona,
P. (2016). Action recognition from depth maps using
deep convolutional neural networks. IEEE Trans. on
Human-Machine Systems, 46(4):498–509.
Wang, P., Li, W., Li, C., and Hou, Y. (2018). Action recogni-
tion based on joint trajectory maps with convolutional
neural networks. Knowledge-Based Syst., 158:43 – 53.
Wang, P., Wang, S., Gao, Z., Hou, Y., and Li, W. (2017).
Structured images for RGB-D action recognition. In
ICCV Workshops, pages 1005–1014.
Wang, X., Hu, J.-F., Lai, J.-H., Zhang, J., and Zheng, W.-S.
(2019). Progressive teacher-student learning for early
action prediction. In CVPR, pages 3551–3560.
Wu, Y. (2012). Mining actionlet ensemble for action recogni-
tion with depth cameras. In CVPR, pages 1290–1297.
Xia, L. and Aggarwal, J. (2013). Spatio-temporal depth
cuboid similarity feature for activity recognition using
depth camera. In CVPR, pages 2834–2841.
Xia, L., Chen, C.-C., and Aggarwal, J. (2012). View invari-
ant human action recognition using histograms of 3D
joints. In CVPR Workshops, pages 20–27.
Yang, X., Zhang, C., and Tian, Y. L. (2012). Recognizing
actions using depth motion maps-based histograms of
oriented gradients. In Proc. of the 20th ACM Int. Conf.
on Multimedia, pages 1057–1060. ACM.
Zheng, Y., Liu, Q., Chen, E., Ge, Y., and Zhao, J. L. (2014).
Time series classification using multi-channels deep
convolutional neural networks. In Web-Age Informa-
tion Management, pages 298–310. Springer.
Zheng, Y., Liu, Q., Chen, E., Ge, Y., and Zhao, J. L. (2016).
Exploiting multi-channels deep convolutional neural
networks for multivariate time series classification.
Frontiers of Computer Science, 10(1):96–112.
Embedded Features for 1D CNN-based Action Recognition on Depth Maps
543
