
Analysis of Recent Re-Identification Architectures for
Tracking-by-Detection Paradigm in Multi-Object Tracking
Haruya Ishikawa
1
, Masaki Hayashi
1
, Trong Huy Phan
2
, Kazuma Yamamoto
2
, Makoto Masuda
2
and Yoshimitsu Aoki
1
1
Department of Electrical Engineering, Keio University, Yokohama, Japan
2
OKI Electric Industry Co., Ltd., Saitama, Japan
Keywords:
Multi-Object Tracking, Person Re-Identification, Video Re-Identification, Metric Learning.
Abstract:
Person re-identification is a vital module of the tracking-by-detection framework for online multi-object track-
ing. Despite recent advances in multi-object tracking and person re-identification, inadequate attention was
given to integrating these technologies to provide a robust multi-object tracker. In this work, we combine
modern state-of-the-art re-identification models and modeling techniques on the basic tracking-by-detection
framework and benchmark them on heavily occluded scenes to understand their effect. We hypothesize that
temporal modeling for re-identification is crucial for training robust re-identification models for they are condi-
tioned on sequences containing occlusions. Along with traditional image-based re-identification methods, we
analyze temporal modeling methods used in video-based re-identification tasks. We also train re-identification
models with different embedding methods, including triplet loss, and analyze their effect. We benchmark the
re-identification models on the challenging MOT20 dataset containing crowded scenes with various occlu-
sions. We provide a thorough assessment and investigation of the usage of modern re-identification modeling
methods and prove that these methods are, in fact, effective for multi-object tracking. Compared to baseline
methods, results show that these models can provide robust re-identification proved by improvements in the
number of identity switching, MOTA, IDF1, and other metrics.
1 INTRODUCTION
Multi-Object Tracking (MOT) is one of the fun-
damental problems in computer vision that remain
unsolved. Due to recent progress in object de-
tection, tracking-by-detection emerged as the go-to
framework in online MOT for its simple architec-
ture and easy deployment. Generally, the tracking-by-
detection framework consists of two parts: i.e., object
detection and data association. We first detect objects,
often people or automobiles, using an object detec-
tor that outputs bounding boxes and their confidence
scores. A non-maximum suppression is employed to
prune these detections and reduce false positives con-
centrated in a single area. We utilize a data associ-
ation to connect the new detections to the history of
identified detections, usually termed as tracklets. The
simplest form of data association is to use IoU, pro-
posed in the Simple Online and Realtime Tracking
(SORT) (Bewley et al., 2016). SORT uses the his-
tory of detections in a tracklet to estimate the track’s
location in the next frame using Kalman Filter (Welch
et al., 1995) and calculate the IoU of the estimations
with the actual detections of the current frame. The
IoU distances between the new detections and all es-
timated detections from existing targets from an as-
signment cost matrix. This assignment cost matrix
is then solved using the Hungarian algorithm (Kuhn,
1955). SORT has become a baseline method for sim-
plicity and runtime. However, SORT suffers from
tracking lost and identity switching (IDS) due to a
heavy dependency on the detector’s accuracy and oc-
clusions. Tracking loss and IDS have been a signifi-
cant challenge for MOT, and many complex methods
tried to solve this issue. Deep SORT (Wojke et al.,
2017) builds on top of SORT to solve these issues by
incorporating a re-identification (Re-ID) model as a
feature extractor to extract feature vectors of the de-
tections. These feature vectors are used to match al-
ready confirmed targets against new detections to re-
identify occluded targets that are temporally lost. In
this matching cascade, the cosine distances of the fea-
ture vectors are used in an assignment cost matrix.
With appearance information, Deep SORT has proven
234
Ishikawa, H., Hayashi, M., Phan, T., Yamamoto, K., Masuda, M. and Aoki, Y.
Analysis of Recent Re-Identification Architectures for Tracking-by-Detection Paradigm in Multi-Object Tracking.
DOI: 10.5220/0010341502340244
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
234-244
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

to re-identify occluded objects by lowering IDS and
loss of tracking.
Recently, great progress has been made in the
field of Person Re-ID. Person Re-ID is a prevalent
computer vision task consisting of re-identifying, or
querying, images of a person in an extensive gallery
of people. Many advances have been made in per-
son Re-ID, which include various models for feature
extraction and training methods for robust embed-
ding network. As people are naturally the center of
most computer vision tasks, it also holds the same
for MOT. For the goal of tracking people, MOTChal-
lenge hosts numerous MOT competitions and datasets
(Leal-Taix
´
e et al., 2015; Milan et al., 2016; Dendorfer
et al., 2020b). Deep SORT uses a simple person Re-
ID model architecture based on ResNet and is trained
on a large Re-ID dataset. Many recent MOT trackers
that use a Re-ID model use a similar simple architec-
ture based on ResNet. However, simple Re-ID mod-
els become inadequately discriminative as MOTChal-
lenge began using very crowded scenes with low de-
tection confidences and various people-to-people or
people-to-object occlusions like the MOT20 dataset
(Dendorfer et al., 2020b). This study explores the
possibility of better performance in MOT by modern
Re-ID models. We investigate modern Re-ID meth-
ods on the task of MOT and only use MOT dataset to
trian the Re-ID models.
We believe that the full potential of Re-ID mod-
els for MOT are yet to be discovered. In this paper,
we extensively study the effects of applying state-of-
the-art person Re-ID methods to the task of MOT.
More specifically, we train these Re-ID models for the
data association module of the tracking-by-detection
paradigm, with the baseline being Deep SORT. The
contributions made in this paper are as follows:
• We exploit state-of-the-art person Re-ID models
for our tracker and compare them against baseline
DeepSORT for the challenging MOT20 dataset.
The only dataset used for training these Re-ID
models is the MOT20 dataset.
• We analyze the effects of metric learning meth-
ods in order to create more robust embedding fea-
ture vectors. Our work investigates the effects of
verification loss and triplet loss along with simple
identity loss.
• We apply video person Re-ID training methods
such as temporal attention and evaluate the effects
they have on the embedding feature vectors for
Re-ID in the MOT task.
We hope these comparisons of Re-ID models serve
as important insights for new Re-ID architectures for
tracking-by-detection framework in the future.
2 RELATED WORKS
Multi-Object Tracking (MOT). Multi-object track-
ing (MOT) aims at predicting trajectories of multiple
targets in video sequences. It is crucial for various
computer vision applications such as surveillance, ac-
tivity recognition, and autonomous driving. One of
the most popular targets is people because of the di-
versity in their looks and behaviors. MOTChallenge
(Leal-Taix
´
e et al., 2015; Milan et al., 2016; Dendor-
fer et al., 2020b; Dendorfer et al., 2020a) is an open
competition where institutes compare their trackers
on various MOT metrics on video sequences depict-
ing movements of people. Despite the many works in
MOT, re-identifying and reducing identity switching
remains a challenging problem, especially in crowded
scenes where occlusions and false alarms are com-
mon.
Multi-object tracking is commonly classified as
either online or batch methods. Online methods
can only use current and previous tracked frames,
whereas batch methods can use the entire sequence.
The class of batch methods typically perform bet-
ter than online methods since they can utilize the
whole sequence and solve a global optimization prob-
lem. However, more applications such as surveil-
lance and autonomous driving need realtime perfor-
mance. Thus, we assume online methods in this pa-
per. Tracking-by-detection is a dominant strategy for
online MOT, which treats detection and data associ-
ation as two separate tasks (Bewley et al., 2016; Yu
et al., 2016; Wojke et al., 2017; Choi, 2015). Recent
deep learning based MOT methods apply CNN-based
object detectors such as Faster R-CNN (Ren et al.,
2015) and YOLOv3 (Farhadi and Redmon, 2018) to
localize all objects of interest in the input image. Data
association is employed in the next step, where the
detections are linked with previous detections to cre-
ate tracklets. Most of these methods utilize an iden-
tity embedding network for re-identification in the
data association step, commonly known as the Re-ID
model. Following SORT and Deep SORT’s tracking-
by-detection framework, it is standard practice that,
we first compute an assignment cost matrix according
to the Re-ID features and IoU of the bounding boxes
and then use the Kalman filter (Welch et al., 1995) and
Hungarian algorithm (Kuhn, 1955) to accomplish the
association. Some variants are also proposed, which
use more complicated association strategies such as
RNNs and group models (Fang et al., 2018; Zhou
et al., 2018; Mahmoudi et al., 2019). The main advan-
tage of using tracking-by-detection methods is that
they can develop the most suitable model for each task
separately without making compromises. Moreover,
Analysis of Recent Re-Identification Architectures for Tracking-by-Detection Paradigm in Multi-Object Tracking
235

they can also crop the image patches according to the
detected bounding boxes and resize them to the same
size before estimating Re-ID features. Cropping the
images helps to handle the scale variations of objects.
As a result, these approaches have achieved the best
performance on public datasets, nevertheless heavily
relying on the underlying detection method’s perfor-
mance. In this work, we focus on the data associa-
tion, specifically the Re-ID model, without going into
deep discussions of the detection problem. Therefore,
we use a public detector given by the MOT datasets
instead of the private detectors used in various state-
of-the-art methods to benchmark the Re-ID models
fairly.
Recent methods on one-shot tracker has been very
successful (Wang et al., 2019; Zhan et al., 2020).
These methods treat MOT as a multi-task learning
problem that try to simultaneously accomplish object
detection and identity embedding in a single network
in order to reduce inference time. One-shot track-
ers such as JDE (Wang et al., 2019) and FairMOT
(Zhan et al., 2020) jointly train the detector and iden-
tity embedding using the same backbone and a variety
of heads for trainining the backbone. We do not ad-
dress one-shot trackers directly in our work since they
train their own private detectors, yet we believe that
the backbone used in these methods can adopt simi-
lar backbones used in the Re-ID method. We believe
our analysis of modern Re-ID models in MOT could
bring useful insights into choosing these backbones.
Person Re-Identification (Re-ID). Person Re-ID, or
image person Re-ID, is a common computer vision
task consisting of re-identifying, or querying, im-
ages of a target person from a gallery. In person
Re-ID, a model must extract feature vectors that are
discriminative enough to differentiate among differ-
ent people but similar enough for the model to iden-
tify the targets. Therefore, a robust Re-ID model
should have a robust embedding vector space. With
the technical advancements of CNNs, the backbone
of CNNs is used to facilitate multi-dimensional em-
bedding. There exist various person Re-ID datasets to
train these Re-ID, such as Market1501 (Zheng et al.,
2015). It is very common for these datasets to have
cleanly prepossessed detections, which are very simi-
lar to MOT’s data association problem. Our work in-
vestigates the effects of state-of-the-art person Re-ID
models such as OSNet (Zhou et al., 2019) and RGA-
SC (Zhang et al., 2020) for Re-ID in MOT.
Similarly, video (person) Re-ID is also a com-
mon computer vision task, which uses a sequence of
images instead of a single image for re-identifying.
Compared to image person Re-ID, video sequences
often portray the target’s occlusions, adding chal-
lenges to re-identification. Various occlusions occur
in MOTChallenge and more so in the recent MOT20
dataset. Therefore, video Re-ID models are useful
for MOT for they are conditioned on these scenes
and can extract robust features.In our work, we train
the Re-ID models that are conditioned on sequential
data much like video Re-ID models. We also analyze
the effects of temporal training methods such as RNN
(McLaughlin et al., 2016) and temporal attention (Liu
et al., 2017) on Re-ID models for MOT.
3 PROPOSED METHOD
In this work, we build on top of the tracking-by-
detection framework to deal with crowded scenes
with heavy occlusion like the sequences in MOT20.
To overcome this problem, we utilize the state-of-
the-art person Re-ID models and various video Re-ID
training methods. As most of the current Re-ID mod-
els used in MOT are variants of ResNet (He et al.,
2016), we use ResNet50 as our baseline Re-ID model.
In Section 3.1, we briefly introduce the state-of-the-
art Re-ID models that are considered for our analy-
sis. In Section 3.2, we propose video Re-ID meth-
ods and models for conditioning the Re-ID backbone
on occluded scenes. In person Re-ID, various metric
learning methods are being studied to embed the fea-
tures more robustly. In Section 3.3, we go over the
simple identity loss along with verification loss and
triplet loss. Finally in Section 3.4, we examine Deep
SORT (Wojke et al., 2017), the tracker that we use
throughout our experiments.
3.1 Image Re-ID Models
With the popularity of person Re-ID, current Re-ID
models are considerably improved. We have selected
the state-of-the-art Re-ID models that have achieved
competitive results in various datasets; more specif-
ically PCB+RPP (Sun et al., 2018), OSNet (Zhou
et al., 2019), RGA-SC (Zhang et al., 2020), and
CBAM (Woo et al., 2018). In this section, we will
explain the mechanics of these models.
PCB and RPP. Part-based Convolutional Baseline
(PCB) was introduced in (Sun et al., 2018). The
model architecture consists of the same ResNet50 for
the backbone. However, instead of using the Global
Average Pooling (GAP) for pooling, PCB pools from
n divided regions into n features, as shown in Fig-
ure 1. Compared to the baseline (ResNet50) model,
PCB benefits from having n distinct part-level fea-
tures because these features offer fine-grained infor-
mation and could lead to learning part-informed fea-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
236

ResNet50
Feature
Vectors
Feature
Tensor
Pooling
RPP
Input Image
1x1x2048
M
N
PCB + RPP
ResNet50
Feature
Vector
Feature
Tensor
Global
Average
Pooling
Input Image
1x1x2048
M
N
Baseline
Figure 1: Baseline model and PCB+RPP.
Baseline (ResNet50) OSNet
Figure 2: Heatmap representation of feature tensor for base-
line model and OSNet on Mars dataset. OSNet can capture
discriminative features such as the shoe the woman is wear-
ing, the pattern on the skirt, and the global shape of the
woman, whereas baseline model suffers from an over focus
on the background on the top left without capturing robust
features.
tures. Refined Part Pooling (RPP) is also proposed to
reinforce the within-part consistency in each part in-
stead of taking an average pooling approach. After
the refinement, similar column vectors are concluded
into the same part, making each part more internally
consistent. We utilize PCB along with RPP, naming
the model PCB+RPP throughout the paper. n is set to
6 for all our experiments.
OSNet. Omni-scale network (OSNet) is coined in
(Zhou et al., 2019), which completely re-designs
CNN to capture both homogeneous and heteroge-
neous scaled features, with homogeneous scale be-
ing in the sense of global features such as body
shape, clothing, etc, and heterogeneous scale mean-
ing combinations of richer features spanning in mul-
tiple scales such as combination of clothing, body at-
tributes, etc. OSNet can capture relatively discrimi-
native attributes compared to the baseline model, as
shown in Figure 2. It is noted here that we use the
best performing width multiplier β = 1.0 and resolu-
tion multiplier γ = 1.0 for all our experiments.
Table 1: Results on Market1501 Dataset. The only loss used
is the ID loss (I).
Model Loss mAP CMC1
Baseline
I
69.94% 86.76%
PCB+RPP 72.84% 87.84%
OSNet 65.6% 78.21%
CBAM 70.07% 85.86%
RGA-SC 72.44% 87.91%
Attention-based Methods. With the recent success
in applying attention mechanisms to CNN, we con-
sider CBAM ResNet50 and RGA-SC ResNet50, pro-
posed in (Woo et al., 2018) and (Zhang et al., 2020)
respectively. They are both modifications of the base-
line model and add channel- and spatial-wise atten-
tion blocks between the ResNet bottleneck blocks.
CBAM block focuses more on the local attention,
whereas RGA-SC block focuses on the global at-
tention of the features. For convenience, we term
CBAM ResNet50 as CBAM and RGA-SC ResNet50
as RGA-SC throughout the experiments.
Ablation Studies on Market1501. Although offi-
cial and unofficial implementations of these models
are available online, we re-implement them according
to their implementations to reproduce their results.
We modify the architectures after GAP (or RPP) and
added a single MLP layer for the classification head
for fair comparisons. We train and test the models
on the Market1501 dataset (Zheng et al., 2015). For
training, we use pretrained weights trained on Im-
ageNet (Deng et al., 2009) for ResNet variants, as
well as Kaiming initialization where pretrained lay-
ers were not available. A simple ID loss with label
smoothing is used. Adam optimizer is used with a
weight decay of 0.0005 and a learning rate of 0.0003.
We use a single step learning rate scheduler with the
step being at 20 epoch and decreases learning rate by
10
−1
. We trained 200 epochs in total for all the mod-
els and used the best metrics for the results which we
show in Table 1. We understand that bag-of-tricks
(Luo et al., 2019) for improving each model exist,
but in this paper, we focus on a fair comparison of
the models under the same conditions. Most of the
models are performing correctly but not close to the
metrics proposed in the papers under these conditions.
3.2 Video Re-ID Methods
Video Re-ID, as explained in Section 2, tackles Re-
ID for sequential data that depicts subtle to major vi-
sual changes that include occlusion and crowded envi-
ronments. In video Re-ID, a model must compensate
for these occlusions or view changes and perform ro-
bust Re-ID. It can be said that video Re-ID models
are conditioned on these kinds of data, thus more ro-
Analysis of Recent Re-Identification Architectures for Tracking-by-Detection Paradigm in Multi-Object Tracking
237
…
Input Sequence
Backbone
Backbone
Backbone
…
Temporal
Modeling
…
…
GAP
Average
Pooling
…
…
GAP
R R R R
…
Average
Pooling
…
…
GAP
Weighted
Average
…
GAP
…
Channel
FC
Temporal
FC
Attention Scores
…
Spatial
Conv
…
Temporal
Conv
Attention Scores
(d) TA
(c) TCA(b) RNN(a) Temporal Pooling
Aggregated
Feature
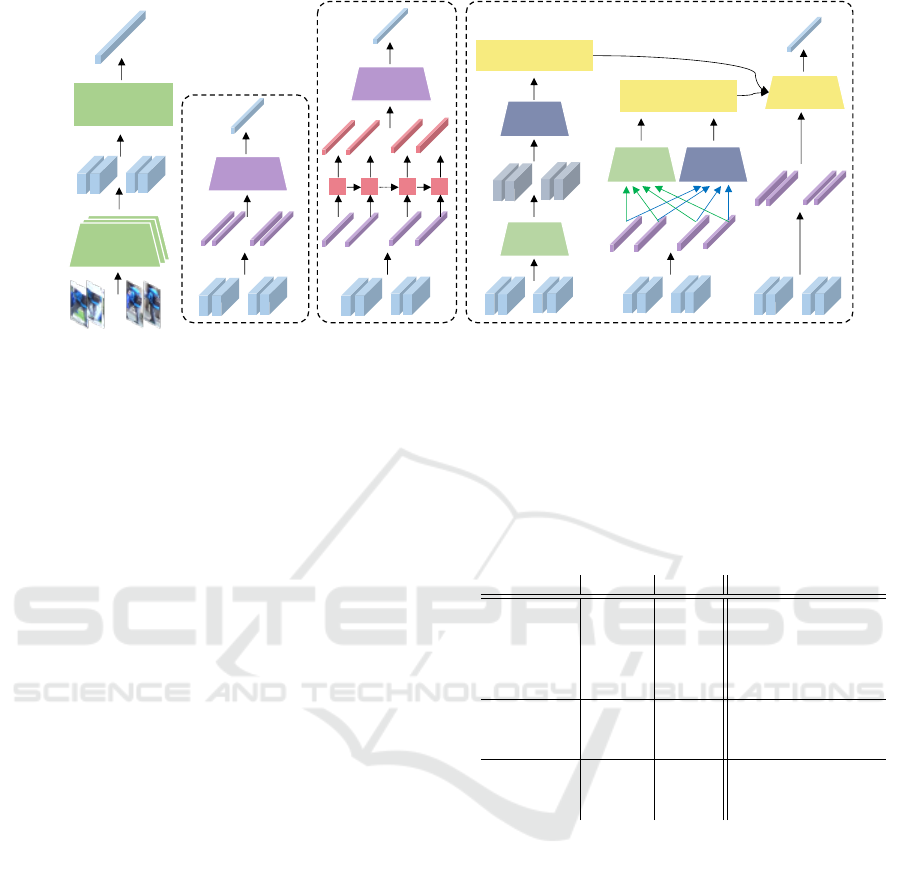
Figure 3: Visualization of temporal models used in video Re-ID. (a) Most naive method is to use temporal (average) pooling.
(b) RNNs are utilized to take advantage of the sequential nature of video Re-ID. (c) Temporal Convolutional Attention (TCA)
uses spatial and temporal convolutions to retrieve attention scores for weighted averaging of features. (d) Temporal Attention
(TA) creates attention scores through channel and temporal fully connected (FC) layers.
bust than modeling used in image Re-ID. In Figure
3, we describe common video Re-ID modeling meth-
ods. We believe that it is crucial to investigate video
Re-ID methods since most detections in MOT20 con-
tain heavy occlusions. It is not feasible to train mod-
els using the image Re-ID method since most images
would have to be pruned out due to occlusion, mak-
ing the dataset very small. Training with video Re-ID
methods can utilize the entire MOT training dataset
without significant drawbacks.
Common Temporal Modeling. A naive temporal
modeling method is to directly use average pooling of
all the features gathered separately through the back-
bone, as is depicted as temporal pooling (TP) in Fig-
ure 3. Another method is using RNN to model the
sequential nature of the video. In our work, instead
of taking the last RNN feature, we use the average
pooling of all the intermediate features.
Attention-based Temporal Modeling. Attention-
based temporal modeling is commonly used in video
Re-ID to mask the features that can potentially gather
robust features for Re-ID. Essentially, if the sequence
contains heavy occlusions, those frames would have
lower attention scores, making use of the more confi-
dent features. Our work investigates temporal convo-
lutional attention (TCA), which also takes advantage
of the spatial convolution for attention modeling, and
temporal attention (TA).
Ablation Studies on Mars. Following the works of
(Gao and Nevatia, 2018), we re-implement temporal
modeling methods. We evaluate temporal methods
along with image Re-ID models on the Mars dataset
(Zheng et al., 2016), as shown in Table 2. Each model
is trained in the same manner as the results in Table
Table 2: Results on Mars Dataset. Losses used are ID loss
(I), verification loss (V), and triplet loss (T). Temporal mod-
eling techniques are temporal pooling (TP), recurrent neu-
ral network (RNN), temporal attention (TA), and temporal
convolutional attention (TCA).
Model Loss Temp. mAP CMC1
Baseline
I TP
62.65% 74.24%
PCB+RPP 61.98% 71.74%
OSNet 72.70% 77.54%
CBAM 73.16% 79.89%
RGA-SC 66.88% 75.25%
Baseline I
RNN 65.65% 79.24%
TA 69.93% 79.35%
TCA 71.31% 80.43%
Baseline
I+V
TP
30.45% 40.27%
I+T 71.65% 79.46%
I+V+T 44.34% 55.6%
1, except for that each model uses a gradual learn-
ing rate warm-up until 20 epoch. It uses a multi-step
learning rate scheduler with a step size of 50 epochs
that decreases the learning rate by 10
−1
. We train
the RNN with the initial learning rate of 0.00015.
From the table, we can see that OSNet performs rela-
tively well, considering that it does not perform well
in Table 1. The cumulative matching characteristics
(CMC) rank-1 metrics for temporal modeling meth-
ods are notably high.
3.3 Metric Learning
ID Loss. Each person is labeled by ID and is treated
as a classification problem when we are training with
ID loss. We assume that the x
i
and y
i
are i-th frame
and identity label. The probability of x
i
being pre-
dicted as y
i
can be encoded by a softmax function and
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
238

01, 02
03
05
Figure 4: Visualization of MOT20 dataset’s training set.
is represented as p(y
i
|x
i
). ID loss is a cross-entropy
loss and is expressed as,
L
id
(i) = −
1
n
n
∑
i=1
log(p(y
i
|x
i
)) (1)
where n is the batch size. To ensure that the model
doesn’t overfit to the randomly annotated label, we
employ label smoothing (Zheng et al., 2017b).
Verification Loss. Given a pair of images, we use
binary cross entropy to classify whether it is the same
person or a different person in a binary verification
loss (Zheng et al., 2017a). This can be expressed as,
L
ver
(i, j) = −δ
i j
log(p(δ
i j
| f
i j
)) − (1 − δ
i j
)log(1 − p(δ
i j
| f
i j
))
(2)
where f
i j
is a differentiable value expressed as f
i j
=
( f
i
− f
J
)
2
and δ
i j
is a binary label (δ
i j
= 1 when x
i
and x
j
is the same identity).
Triplet Loss. In a triplet loss, we form a triplet of an-
chor x
i
, positive x
j
(same identity as anchor), and neg-
ative x
k
(different identity from anchor). We embed
features closer for the same identities and, at the same
time, embed features further apart when the identities
are different. If ρ is the margin constant of the em-
bedding space, we can express the triplet loss as,
L
tri
(i, j , k) = max(ρ + d
i j
− d
ik
, 0) (3)
where d(·) represents the euclidean distance of the
samples. We follow the work of (Hermans et al.,
2017) and use batch hard triplet loss in order to mine
the hardest triplet for the loss and minimize the effect
of easier triplets. ρ is set to 0.3 in all our experiments.
Ablation Studies on Mars. In our work, we integrate
all the losses into a single loss expressed as,
L =
α
N
id
∑
i, j,k
L
id
+
β
N
ver
∑
i6= j,i6=k, j6=k
L
ver
+ γL
tri
(4)
where (α, β, γ) are constants (α + β + γ = 1) and N
id
and N
ver
are the total sample size of each of the
elements. On Table 2, we show results of using
combinations of each of the metric learning losses.
The value of (α, β, γ) for each of the combinations
are: (0.8, 0.2, 0) for I+V, (0.8, 0, 0.2) for I+T, and
(0.6, 0.2, 0.2) for I+V+T. It is clear that adding ver-
ification loss does not improve, but rather degrade
the metrics compared to only using ID loss. Adding
triplet loss does improve the metrics of the baseline
by 9% for mean average precision (mAP).
3.4 Tracking and Re-ID Model
We use Deep SORT as our base tracker throughout the
experiments (Wojke et al., 2017). We choose Deep
SORT for its simplicity, and it allows for a fair eval-
uation of the effects of each of the Re-ID model on
the task of MOT. Continuing off of the explanation
in Section 2, various parameters of Deep SORT must
be discussed. From the detector, we obtain bounding
boxes and their confidence scores. We put a thresh-
old on the confidence scores to reduce the amount of
false alarms. When the detections are unmatched to
any of the prior tracks, new track hypotheses are cre-
ated. The track hypothesis is in a tentative state un-
til it is confirmed as a tracklet by having τ
init
frames
of matched detection. When hypotheses or tracklets
have no new detections for τ
max
frames, the tracks
are considered to have left the scene and are in a
deleted state. For data association, we keep a gallery
of features for each track and save up to L
max
fea-
tures to match against. In our experiments, τ
init
= 3,
τ
max
= 70, L
max
= 100, and we use cosine distance as
our distance metric (Wojke and Bewley, 2018). Since
people are shown very far in the MOT20 dataset, most
of the confidence scores are around 0. Therefore we
reduce the threshold for confidence scores to 0.
4 EXPERIMENTS
MOT20 Dataset. For evaluating MOT, we use the
MOT20 dataset provided by MOTChallenge (Dendor-
fer et al., 2020b). Since the number of submissions
is limited, as advised by MOTChallenge, we use the
training set of the dataset for our initial evaluation dis-
cussed in Section 5.1. More specifically, in MOT20,
Analysis of Recent Re-Identification Architectures for Tracking-by-Detection Paradigm in Multi-Object Tracking
239

Table 3: Upper-bound results of each video-based Re-ID method used in DeepSORT for sequence 05 of MOT20 Dataset.
These upper-bound results are obtained from using the ground truth tracks as detections for each frame, which are associated
using Kalman Filter and Re-ID module. These results provide a better understanding of how each Re-ID models perform.
The ”Vis Ratio” is the visible ratio of the training dataset used to train the Re-ID models. All the models are trained with ID
loss and batch hard triplet loss.
Re-ID Vis Ratio MOTA ↑ IDF1 ↑ MOTP ↓ MT ↑ ML ↓ FP ↓ FN ↓ Rec. ↑ Prec. ↑ IDS ↓ Frag. ↓
BL
0.3 64.35% 60.55% 9.97% 645 105 2272 264505 64.78% 99.54% 1073 3001
0.0 64.37% 59.42% 9.96% 646 104 2281 264331 64.82% 99.53% 1102 3020
CBAM
0.3 64.36% 59.12% 9.96% 644 106 2302 264392 64.81% 99.53% 1112 3000
0.0 64.36% 59.68% 9.96% 646 105 2322 264417 64.81% 99.53% 1038 3002
OSNet
0.3 64.37% 56.84% 9.96% 645 103 2311 264102 64.85% 99.53% 1259 3017
0.0 64.39% 57.14% 9.97% 649 104 2276 264042 64.86% 99.54% 1201 3021
PCB+RPP
0.3 64.44% 61.65% 9.95% 649 105 2209 264919 64.87% 99.55% 1032 2934
0.0 64.08% 60.60% 9.92% 638 107 2596 266015 64.59% 99.47% 1279 2885
RGA-SC
0.3 63.91% 59.62% 9.93% 634 106 2640 267144 64.44% 99.46% 1365 2909
0.0 64.02% 61.80% 9.91% 641 104 2605 266551 64.52% 99.47% 1176 2912
there are four training video sequences: 01, 02, 03,
and 05. Since sequences 01 and 02 are taken from
the exact point of view, and 03 and 05 differ greatly
(as shown in Figure 4), we use 01, 02, and 03 for the
training sequences and 05 as our test sequence. Note
that sequence 05 has more population density, thus
more occlusion than the other three sequences. Later,
we use the best-performing methods to benchmark on
MOTChallenge’s server.
Training the Re-ID Models. As explained in Sec-
tions 3.1 and 3.2, two different kinds of Re-ID train-
ing methods are commonly used: image-based and
video-based Re-ID. For the task of image-based Re-
ID, the images are most likely to be clear and do not
contain images with people that are heavily occluded.
On the other hand, heavily occluded sequences often
occur in the task of video-based Re-ID. Therefore, we
refine the training set of the MOT20 dataset in train-
ing our models. More specifically, we take the ground
truth detections of the MOT20 dataset and use them as
our training dataset for our Re-ID models. For train-
ing image-based Re-ID models, we use detections
with a visible ratio over of 0.3, which is a common
practice in the previous MOTChallenges (Bergmann
et al., 2019).
For training video-based Re-ID models, we use
detections with a visible ratio of 0, which is the entire
detection sequence of the MOT20 dataset. Since vis-
ible ratio for video-based Re-ID models has not been
studied for the MOT20 dataset, we study an upper-
bound evaluation on sequence 05 of the MOT20
dataset. Results on Table 3 show that a visible ratio
of over 0 is acceptable for training our video-based
Re-ID models. As for the training details, we ran-
domly sample 8 consecutive frames from the tracklet
to create our models’ input.
Training details for all Re-ID methods for the
MOT20 dataset are the same as the ablation studies
for the Mars dataset results. We train each model for
200 epochs and use the last epoch for all our evalua-
tions in Section 5 because we can not afford to create a
validation set due to the limited training dataset avail-
able. Note that for benchmarking on MOT20 (Section
5.2), we use the entire training sequences to train our
Re-ID models.
5 RESULTS
5.1 Evaluation on Sequence 05
Since we cannot evaluate all the combinations on the
MOTChallenge benchmarking server, we will first
evaluate our models on sequence 05 of the MOT20
dataset as shown in Table 4. We have evaluated both
image and video Re-ID models. Image Re-ID mod-
els are trained on the image Re-ID dataset created
from MOT20 public detections. Video Re-ID models
are trained on video sequences of tracklets contain-
ing various occlusions. All Re-ID models are trained
on sequences 01, 02, and 03. The only dataset used
to train these models is the MOT20 dataset. Along
with Deep SORT, we have included outputs of SORT,
which is often the minimum standard in MOTChal-
lenge. Results are colored according to the rankings
(best seen on PDF).
Metrics used in the results are: MOTA, IDF1,
MOTP, Identification Precision (IDP), Identification
Recall (IDR), Recall (Rec.), Precision (Prec.), Mostly
Tracked (MT), Partially Tracked (PT), Mostly Lost
(ML), False Positives (FP), Misses (Miss), Identity
Switching (IDS), and Fragmentation (Frag). Details
of the definitions of each metrics are explained in
(Dendorfer et al., 2020a).
Image vs Video Re-ID Dataset. Since the image
training set created from the MOT20 dataset consists
of redundant images of each identity from the high
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
240

Table 4: Results on sequence 05 of the MOT20 dataset. For Deep SORT, both “Image” and “Video” methods of training are
used. ‘Red” and “magenta” mean first and second-best values respectively and “blue” represents the worst value. As it is
obvious from the colors, modern Re-ID methods are very advantageous over SORT. Models such as RGA-SC and PCB+RPP
trained over video data using ID (I) and triplet (T) loss have many competitive edges over the Baseline (BL) model. One of
them being the lower ID Switching (IDS) value, which has greatly reduced. It is also noted that besides OSNet, the backbone
architecture for all models is ResNet50.
Tracker Model Loss MOTA ↑ IDF1 ↑ MOTP ↓ IDP ↑ IDR ↑ Rec. ↑ Prec. ↑ MT ↑ PT ↑ ML ↓ FP ↓ Miss ↓ IDS ↓ Frag. ↓
SORT 45.18% 27.40% 13.16% 42.65% 20.19% 47.07% 99.44% 159 750 302 1991 397671 12209 14884
Deep SORT
Image
BL I+T 51.68% 46.10% 13.49% 66.52% 35.28% 52.60% 99.19% 233 738 240 3238 356141 3632 17040
CBAM I+T 51.83% 43.39% 13.62% 62.36% 33.27% 52.88% 99.11% 236 747 228 3571 354042 4306 17664
OSNet I 51.95% 42.40% 13.59% 60.88% 32.53% 52.98% 99.15% 241 742 228 3396 353276 4308 17607
PCB+RPP I+T 52.00% 28.82% 14.00% 41.16% 22.17% 53.40% 99.14% 246 743 222 3487 350138 7038 18456
RGA-SC I+T 51.84% 27.96% 14.02% 39.95% 21.50% 53.32% 99.08% 247 744 220 3713 350703 7462 18446
Video
BL I 52.03% 38.76% 13.69% 55.56% 29.76% 53.10% 99.15% 246 742 223 3405 352376 4629 17871
BL I+T 52.01% 31.08% 13.86% 44.43% 23.90% 53.31% 99.13% 249 741 221 3528 350778 6285 18218
BL I+V 51.81% 27.89% 14.01% 39.83% 21.45% 53.36% 99.09% 247 744 220 3688 350413 7970 18630
BL I+V+T 51.83% 27.43% 14.00% 39.18% 21.10% 53.37% 99.10% 247 744 220 3650 350322 7973 18615
BL+RNN I 52.00% 32.99% 13.80% 47.22% 25.35% 53.23% 99.15% 245 746 220 3433 351411 5828 18095
BL+RNN I+T 51.97% 28.13% 13.97% 40.17% 21.64% 53.39% 99.11% 244 747 220 3590 350225 7064 18490
BL+TCA I 52.04% 39.23% 13.73% 56.23% 30.12% 53.11% 99.14% 236 751 224 3450 352314 4543 17908
BL+TCA I+T 52.06% 42.22% 13.64% 60.55% 32.41% 53.06% 99.14% 244 743 224 3457 352677 4077 17795
BL+TA I 52.03% 39.71% 13.67% 56.94% 30.49% 53.10% 99.15% 243 744 224 3415 352368 4634 17815
BL+TA I+T 52.06% 32.44% 13.79% 46.38% 24.95% 53.32% 99.12% 250 739 222 3575 350735 5883 18289
CBAM I 51.91% 33.56% 13.81% 48.05% 25.78% 53.18% 99.10% 242 746 223 3624 351762 5950 18130
CBAM I+T 52.15% 39.60% 13.65% 56.71% 30.41% 53.18% 99.16% 245 739 227 3389 351782 4377 17885
OSNet I 51.81% 29.66% 13.91% 42.41% 22.80% 53.26% 99.09% 246 743 222 3667 351158 7222 18400
OSNet I+T 52.11% 36.54% 13.69% 52.26% 28.09% 53.28% 99.12% 249 739 223 3571 351044 5183 18193
PCB+RPP I 51.72% 29.31% 13.89% 41.93% 22.53% 53.23% 99.05% 244 745 222 3817 351371 7588 18373
PCB+RPP I+T 51.07% 46.06% 13.36% 67.07% 35.08% 51.92% 99.27% 230 733 248 2879 361245 3526 16239
RGA-SC I 51.94% 37.26% 13.63% 53.43% 28.60% 53.06% 99.13% 238 751 222 3510 352655 4891 17817
RGA-SC I+T 51.43% 47.87% 13.37% 69.46% 36.52% 52.19% 99.27% 233 735 243 2902 359226 2785 16438
CBAM+TA I 51.94% 34.21% 13.79% 48.98% 26.28% 53.19% 99.14% 240 747 224 3483 351713 5911 18012
CBAM+TA I+T 52.09% 38.43% 13.66% 55.04% 29.52% 53.18% 99.15% 241 748 222 3438 351767 4753 17921
frame-rate, most of the modeling methods have failed
to converge within the limited epoch. The results
on the table are the ones that have managed to con-
verge. Note that most models that have converged are
ID and triplet loss. As only one tracklet exists for
a single identity, the video training set is relatively
small. Additionally, as a result of random sampling
from the tracklets, it was much easier to form a batch,
making the video Re-ID modeling approach easier to
converge. All of the models have converged within
the limited epoch. The best performing image Re-
ID model is PCB+RPP, which performs 52.00% for
MOTA, has the highest recall with 53.40%, and low-
est misses of 350138. However, this comes with the
cost of having one of the largest counts of IDS and
fragmentation (i.e., the number of times the ground-
truth trajectory is untracked). Video Re-ID, how-
ever, has the highest MOTA performance with CBAM
(I+T), scoring 52.50% while maintaining lower IDS
and fragmentation, which is commonly known to be
a trade-off.
Analysis of Recent Re-Identification Architectures for Tracking-by-Detection Paradigm in Multi-Object Tracking
241

Effects of Metric Learning. Considering losses of
baseline methods (in video Re-ID methods), we can
see that the baseline method with ID loss and ID with
triplet loss performs better than those with verifica-
tion loss. This is of no surprise since verification
loss performs poorly on the Mars dataset in Table 2.
Models trained with verification loss have the lowest
mostly lost values, yet at the costs of lower IDS, frag-
mentation, MOTA, and IDF1. It is hard to observe
the effects of triplet loss by only looking at the base-
line models. However, when we compare ID loss and
triplet loss throughout the table, we can see significant
improvements with various metrics such as fragmen-
tation, IDS, IDF1, IDP, and IDR. Generally, we can
observe that ID loss with triplet loss does not deterio-
rate the results and improve certain metrics.
Impact of Video Re-ID Modeling. Comparing the
baseline model (baseline with ID loss) to baseline
methods that use temporal modeling in video Re-ID
models, we can see that TCA and TA have higher
MOTA. TA (I+T) has the highest mostly tracked
counts, low mostly lost counts, and a low number
of misses. TCA (I) has the highest partially tracked
counts with low mostly lost counts and IDS. Although
MOTA is lower for RNN models, they have the low-
est mostly lost counts with a low number of misses
and IDS. It can be concluded that temporal model-
ing helps make a more robust model for occlusion in
baseline ResNet50 models. However, when we apply
TA to CBAM, despite increasing the overall metrics
for modeling with ID loss, CBAM trained on ID +
triplet loss struggles slightly. A likely reason is that
the triplet loss is known to be difficult to converge,
and the last epoch is overfitting to the dataset. We can
interpret it as that temporal modeling improves par-
tially tracked and mostly lost values.
How do State-of-the-Art Models Stack Up? The
purpose of the Re-ID model in the tracking-by-
detection framework is to reduce the number of IDS
and loss of tracking. In this matter, RGA-SC makes
tremendous improvements over the baseline methods
with the comparatively lowest IDS value of 2785.
PCB+RPP (I+T) has the second lowest IDS value
with 3526. CBAM (I+T) and OSNet (I+T) have the
highest and second-highest MOTA values. We believe
that state-of-the-art Re-ID models prove useful in cre-
ating a more robust Re-ID model for MOT.
5.2 Benchmarking on MOT20
In the previous section, we analyzed the effects of var-
ious Re-ID models and training methods on sequence
05. We have discovered several key aspects of these
results:
• Most models conditioned on sequential data us-
ing video-based Re-ID could increase MOTA and
reduce IDS
• Using batch hard triplet loss along with identity
loss also tends to increase MOTA and reduce IDS
• Recent state-of-the-art Re-ID models show
promise in further reducing IDS
Since there is a limitation in submitting trackers to
the benchmark server, we choose four methods, in-
cluding the baseline method for benchmarking on
MOT20. We show these Re-ID methods applied on
Deep SORT and Tracktor++ (Bergmann et al., 2019),
one of the state-of-the-art methods for the MOTChal-
lenge benchmark. The benchmark results are shown
in Table 5 along with results of other online MOT
methods. Metrics used in the results are the same
as Table 4 with the addition of false alarm per frame
(FAF).
Comparison with Baseline Re-ID. Generally, for
DeepSORT tracker, state-of-the-art Re-ID models
score higher in IDF1, lower FP, higher precision, and
lower IDS. It is no surprise for these models to have
lower IDS since it is in our best interest to include
Re-ID models for this purpose, and it proves that re-
cent Re-ID models provide an edge over the baseline.
However, MOTA scores do not change but are lower
by a small margin for PCB+RPP and RGA-SC. As
we see in Table 4 in the RGA-SC with I+T, we be-
lieve this to be a trade-off of reducing the number of
IDS.
Application to Recent Tracker. We have applied
CBAM and RGA-SC to a recent tracker that scores
fairly high on the MOT20 benchmark; namely, Track-
tor++ (Bergmann et al., 2019). Tracktor++ follows a
method similar to tracking-by-detection can use the
Re-ID model for data association. As for our imple-
mentation of Tracktor++, we use the official imple-
mentation, and the tracker parameters for that is used
for MOT17 benchmark since parameters for MOT20
are not available and could not recreate the results
posted on MOT20 benchmark (Tracktor++v2 is the
official results). Comparison of our Tracktor++ re-
sults shows that the only metric that changed is the
number of IDS. CBAM reduces the number of IDS,
but on the contrary, RGA-SC increases the number of
IDS. Note that the Re-ID model weights are the same
as the one used for DeepSORT. By default, Track-
tor++ does not fully utilize the Re-ID models, and we
would need further analysis on Tracktor++ to figure
out parameters to change so that Re-ID models could
influence the tracking results.
Further Analysis and Future Works. Overall, state-
of-the-art methods, temporal modeling, and metric
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
242

Table 5: Benchmark results on MOT20 Dataset. Along with our various DeepSORT trackers, we analyze the effects of Re-ID
models on Tracktor++ (Bergmann et al., 2019). For comparison, we add the benchmarking results of SORT (Bewley et al.,
2016), Tracktor++v2 (Bergmann et al., 2019), and Fair (Zhan et al., 2020). Note that we could not recreate the results of
Tracktor++v2 on MOT20 since the hyperparameters for the tracker are not available (*Re-ID model for Tracktor++v2 is
ResNet50 trained on MOT17 dataset with ID loss and batch hard triplet loss. **Re-ID model for Fair is ResNet34 and is
jointly trained on the task of detection).
Tracker Re-ID MOTA ↑ IDF1 ↑ MOTP ↓ MT ↑ ML ↓ FP ↓ FN ↓ Rec. ↑ Prec. ↑ FAF ↓ IDS ↓ Frag. ↓
Deep SORT
BL 43.8% 43.7% 77.7% 212 311 31771 255254 50.7% 89.2% 7.1 3918 12048
PCB+RPP 43.2% 46.0% 77.8% 203 318 30431 259659 49.8% 89.4% 6.8 3909 11396
CBAM 43.8% 45.7% 77.7% 212 313 31658 255415 50.6% 89.2% 7.1 3677 11977
RGA-SC 43.5% 47.3% 77.8% 208 319 29685 259403 49.9% 89.7% 6.6 3347 11239
Tracktor++
BL 52.0% 44.1% 78.7% 363 326 6988 236380 54.3% 97.6% 1.6 4813 4345
CBAM 52.0% 44.1% 78.7% 363 326 6988 236380 54.3% 97.6% 1.6 4805 4345
RGA-SC 52.0% 44.1% 78.7% 363 326 6988 236380 54.3% 97.6% 1.6 4814 4345
SORT None 42.7% 45.1% 78.5% 208 326 27521 264694 48.8% 90.2% 6.1 4470 17798
Tracktor++v2 * 52.6% 52.7% 79.9% 365 331 6930 236680 54.3% 97.6% 1.5 1648 4374
Fair ** 61.8% 67.3% 78.6% 855 94 103440 88901 82.8% 80.6% 23.1 5243 7874
learning improve the Re-ID capability in the tracking-
by-detection framework. It is well known that a big
limitation of the tracking-by-detection framework is
its heavy dependency on the detector. Fair (Zhan
et al., 2020) scores the highest MOTA, the highest
IDF1, the highest number of MT, and the lowest num-
ber of ML, which can be attributed to the joint learn-
ing of detection and embedding feature for Re-ID. As
shown in Table 3, if we use a perfect detector, it is
clear that there are minimal trade-offs between each
of the metrics and we can see a relatively small gain
on performance compared to the baseline method.
Generally, there are no major differences in perfor-
mance between each of the Re-ID models and makes
us think that Re-ID has no effects on MOT metrics.
However, as shown in Table 4 and 5, we can clearly
see the performance gains by using state-of-the-art
Re-ID methods such as IDF1 score, precision, IDS,
and the number of fragmentation. It is future work to
further understand the relationship between the Re-ID
module and the detector, and provide a better way of
data association in MOT.
For all our results, we use only the training se-
quences of MOT20 for training the Re-ID models.
However, the original DeepSORT paper used the
Mars dataset to train its Re-ID model (Wojke et al.,
2017; Wojke and Bewley, 2018). We believe that us-
ing the various image and video Re-ID datasets will
enhance the Re-ID model’s capability since our Re-ID
models are possibly overfitting to the limited scenes
of MOT20.
6 CONCLUSIONS
In this work, we have improved the Re-ID model in
the tracking-by-detection framework for online MOT.
We use state-of-the-art Re-ID models along with var-
ious Re-ID modeling techniques such as metric learn-
ing and temporal modeling to improve the Re-ID met-
rics. Benchmarking on a heavily occluded MOT20
dataset proves that these methods improve identity
switching and other metrics compared to the base-
line models frequently used in this framework. We
believe that the backbones used in the state-of-the-art
Re-ID methods could be used with the recent joint de-
tection and embedding (JDE) methods (Wang et al.,
2019; Zhan et al., 2020) that score very high on the
MOTChallenge, which will be one of the future work
of our research.
ACKNOWLEDGEMENTS
This paper is partly based on results obtained from a
project, JPNP16007, commissioned by the New En-
ergy and Industrial Technology Development Organi-
zation (NEDO). This work was partly supported by
JSPS KAKENHI Grant Number JP20J2212.
REFERENCES
Bergmann, P., Meinhardt, T., and Leal-Taixe, L. (2019).
Tracking without bells and whistles. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 941–951.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468.
Choi, W. (2015). Near-online multi-target tracking with
aggregated local flow descriptor. In Proceedings of
the IEEE international conference on computer vision
(ICCV), pages 3029–3037.
Analysis of Recent Re-Identification Architectures for Tracking-by-Detection Paradigm in Multi-Object Tracking
243

Dendorfer, P., O
ˇ
sep, A., Milan, A., Schindler, K., Cremers,
D., Reid, I., Roth, S., and Leal-Taix
´
e, L. (2020a).
Motchallenge: A benchmark for single-camera multi-
ple target tracking. arXiv preprint arXiv:2010.07548.
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cremers,
D., Reid, I., Roth, S., Schindler, K., and Leal-Taix
´
e,
L. (2020b). Mot20: A benchmark for multi object
tracking in crowded scenes. arXiv:2003.09003[cs].
arXiv: 2003.09003.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Fang, K., Xiang, Y., Li, X., and Savarese, S. (2018). Recur-
rent autoregressive networks for online multi-object
tracking. In 2018 IEEE Winter Conference on Appli-
cations of Computer Vision (WACV), pages 466–475.
IEEE.
Farhadi, J. R. A. and Redmon, J. (2018). Yolov3: An incre-
mental improvement. Retrieved September, 17:2018.
Gao, J. and Nevatia, R. (2018). Revisiting temporal mod-
eling for video-based person reid. arXiv preprint
arXiv:1805.02104.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hermans, A., Beyer, L., and Leibe, B. (2017). In defense
of the triplet loss for person re-identification. arXiv
preprint arXiv:1703.07737.
Kuhn, H. W. (1955). The hungarian method for the as-
signment problem. Naval research logistics quarterly,
2(1-2):83–97.
Leal-Taix
´
e, L., Milan, A., Reid, I., Roth, S., and Schindler,
K. (2015). MOTChallenge 2015: Towards a bench-
mark for multi-target tracking. arXiv:1504.01942
[cs]. arXiv: 1504.01942.
Liu, Y., Yan, J., and Ouyang, W. (2017). Quality aware
network for set to set recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 5790–5799.
Luo, H., Gu, Y., Liao, X., Lai, S., and Jiang, W. (2019).
Bag of tricks and a strong baseline for deep person re-
identification. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition Work-
shops, pages 0–0.
Mahmoudi, N., Ahadi, S. M., and Rahmati, M. (2019).
Multi-target tracking using cnn-based features: Cnn-
mtt. Multimedia Tools and Applications, 78(6):7077–
7096.
McLaughlin, N., Del Rincon, J. M., and Miller, P. (2016).
Recurrent convolutional network for video-based per-
son re-identification. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 1325–1334.
Milan, A., Leal-Taix
´
e, L., Reid, I., Roth, S., and Schindler,
K. (2016). MOT16: A benchmark for multi-object
tracking. arXiv:1603.00831 [cs]. arXiv: 1603.00831.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Sun, Y., Zheng, L., Yang, Y., Tian, Q., and Wang, S. (2018).
Beyond part models: Person retrieval with refined part
pooling (and a strong convolutional baseline). In Pro-
ceedings of the European Conference on Computer Vi-
sion (ECCV), pages 480–496.
Wang, Z., Zheng, L., Liu, Y., Li, Y., and Wang, S.
(2019). Towards real-time multi-object tracking.
arXiv preprint arXiv:1909.12605.
Welch, G., Bishop, G., et al. (1995). An introduction to the
kalman filter.
Wojke, N. and Bewley, A. (2018). Deep cosine metric learn-
ing for person re-identification. In 2018 IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 748–756. IEEE.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing (ICIP), pages 3645–3649. IEEE.
Woo, S., Park, J., Lee, J.-Y., and So Kweon, I. (2018).
Cbam: Convolutional block attention module. In Pro-
ceedings of the European conference on computer vi-
sion (ECCV), pages 3–19.
Yu, F., Li, W., Li, Q., Liu, Y., Shi, X., and Yan, J. (2016).
Poi: Multiple object tracking with high performance
detection and appearance feature. In European Con-
ference on Computer Vision (ECCV), pages 36–42.
Springer.
Zhan, Y., Wang, C., Wang, X., Zeng, W., and Liu, W.
(2020). A simple baseline for multi-object tracking.
arXiv preprint arXiv:2004.01888.
Zhang, Z., Lan, C., Zeng, W., Jin, X., and Chen, Z.
(2020). Relation-aware global attention for person re-
identification. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 3186–3195.
Zheng, L., Bie, Z., Sun, Y., Wang, J., Su, C., Wang, S., and
Tian, Q. (2016). Mars: A video benchmark for large-
scale person re-identification. In European Confer-
ence on Computer Vision, pages 868–884. Springer.
Zheng, L., Shen, L., Tian, L., Wang, S., Wang, J., and Tian,
Q. (2015). Scalable person re-identification: A bench-
mark. In Proceedings of the IEEE international con-
ference on computer vision (ICCV), pages 1116–1124.
Zheng, Z., Zheng, L., and Yang, Y. (2017a). A discrim-
inatively learned cnn embedding for person reiden-
tification. ACM Transactions on Multimedia Com-
puting, Communications, and Applications (TOMM),
14(1):1–20.
Zheng, Z., Zheng, L., and Yang, Y. (2017b). Unlabeled
samples generated by gan improve the person re-
identification baseline in vitro. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 3754–3762.
Zhou, K., Yang, Y., Cavallaro, A., and Xiang, T.
(2019). Omni-scale feature learning for person re-
identification. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
3702–3712.
Zhou, Z., Xing, J., Zhang, M., and Hu, W. (2018). On-
line multi-target tracking with tensor-based high-order
graph matching. In 2018 24th International Con-
ference on Pattern Recognition (ICPR), pages 1809–
1814. IEEE.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
244
