Object Hypotheses as Points for Efficient Multi-Object Tracking
Shuhei Tarashima
Innovation Center, NTT Communications Corporation, Japan
Keywords:
Multi-Object Tracking, CPU-GPU Data Transfer, Data Association.
Abstract:
In most multi-object tracking (MOT) approaches under the tracking-by-detection framework, object detection
and hypothesis association are addressed separately by setting bounding boxes as interfaces among them. This
subdivision has greatly yielded advantages with respect to tracking accuracy, but it often lets researchers over-
look the efficiency of whole MOT pipelines, since these interfaces can cause the time-consuming data com-
munication between CPU and GPU. Alternatively, in this work we define an object hypothesis as a keypoint
representing the object center, and propose simple data association algorithms based on the spatial proximity
of keypoints. Different from standard data association methods like Hungarian algorithm, our approach can
easily be run on GPU, which enables direct feed of detection results generated on GPU to our tracking module
without the need of CPU-GPU data transfer. In this paper we conduct a series of experiments on MOT16,
MOT17 and MOT-Soccer datasets in order to show that (1) our tracking module is much more efficient than
existing methods while achieving competitive MOTA scores, (2) our tracking module run on GPU can im-
prove the whole MOT efficiency via reducing the overhead of CPU-GPU data transfer between detection and
tracking, and (3) our tracking module can be combined to a state-of-the-art unsupervised MOT method based
on joint detection and embedding and successfully improve its efficiency.
1 INTRODUCTION
Multi-Object Tracking (MOT) aims to recover tra-
jectories of objects from target categories in a given
video, which has myriad of applications in surveil-
lance (Alldieck et al., 2016), autonomous driving
(O
˘
sep et al., 2017), sports analysis (Zhang et al.,
2020a) and biomedical image understanding (Liang
et al., 2013; Meirovitch et al., 2019). Most recent ap-
proaches follow the tracking-by-detection paradigm,
in which object detectors are first applied to each indi-
vidual frame to find the object locations (e.g. bound-
ing boxes (Kim et al., 2015; Tang et al., 2016),
segmentations (Sun et al., 2018; Voigtlaender et al.,
2019)), then these hypotheses are associated across
frames to form trajectories of the same identity. Usu-
ally, under the tracking-by-detection framework ob-
ject detection and data association are addressed sep-
arately: Bounding boxes or segmentations generated
by object detectors are fed into a data association
module, while no other knowledge is assumed to
be transferred. This simple subdivision has led re-
searchers to take significant advantage of existing ob-
ject detectors based on convolutional neural networks
(CNNs) (Ren et al., 2015; Choi et al., 2019; Red-
Association
(Keypoints)
CNN
Post-process
Detection
Trajectories
(Bouding boxes, Segmentations)
CNN
Detection
Trajectories
Association
(a) Existing Unsupervised MOT (b) CenterTracker (Proposed)
: on CPU
: on GPU
Post-process
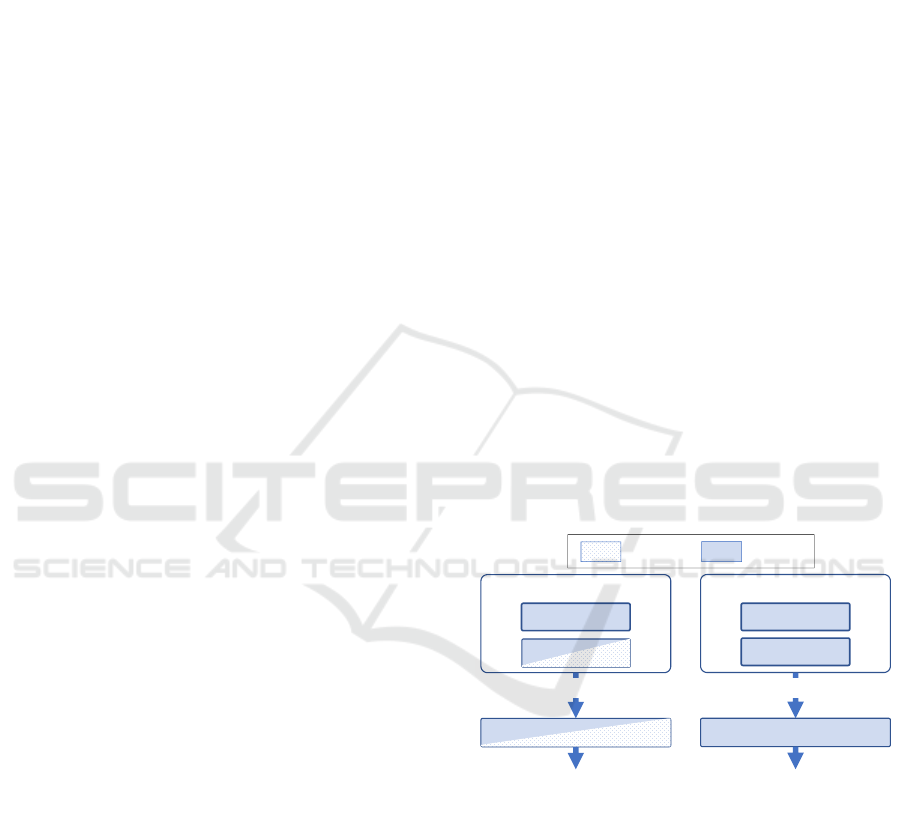
Figure 1: Different from existing unsupervised MOT ap-
proaches where object bounding boxes or segmentations
are the interfaces between detection and association (as in
(a)), our approach, named CenterTracker, feeds a set of key-
points representing object centers to a data association mod-
ule (as in (b)). Current trajectories and detections are linked
based on the spatial proximity between them. Since this
data association can easily be run on GPU, this approach
can reduce the communication overhead between CPU and
GPU.
mon and Farhadi, 2018) running on GPU, and allow
them to focus on the problem of linking hypotheses
in video frames to estimate their tracks. However, at
828
Tarashima, S.
Object Hypotheses as Points for Efficient Multi-Object Tracking.
DOI: 10.5220/0010343508280835
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
828-835
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the same time, this often lets researchers overlook the
efficiency of whole MOT algorithms: Basically, as
shown in Figure 1 (a), modern object detectors feed
an input image into CNNs to produce a set of ten-
sors, which are transformed into final detection results
in the following post-processing step. Notice that
in many cases CNN feedforwarding is performed on
GPU while post-processing is on CPU. In these cases
tensors to be transformed are transferred from GPU to
CPU, which may significantly slow down the overall
throughput of MOT. While recently some deep learn-
ing frameworks provide GPU-based post-processing,
CPU-GPU data communication is still required be-
tween detection and association when tracking is per-
formed in an unsupervised manner (Bochinski et al.,
2017; Bochinski et al., 2018; Bewley et al., 2016; Wo-
jke et al., 2017; Fu et al., 2019). From these facts, we
can say that the CPU-GPU communication overhead
has not been fully addressed in the current tracking-
by-detection framework.
This issue motivates us to propose an alternative
to a bounding box or a segmentation as an interface
between detection and association. Specifically, as
shown in Figure 1 (b), we consider an object hypothe-
sis as a keypoint representing its center location. This
idea allow us to (i) design an efficient data association
algorithm that can be easily run on GPU and (ii) di-
rectly feed detection outputs of recent object detectors
(Redmon and Farhadi, 2018; Zhou et al., 2019a) into
our data association module without the need of CPU-
GPU data transfer. To this end, we propose a sim-
ple data association algorithm, named CenterTracker,
which can efficiently be run on both CPU and GPU
and enables whole MOT pipelines to be performed on
GPU while minimizing CPU-GPU data transfer. No-
tice that since our data association is performed in an
unsupervised manner, CenterTracker does not require
any training for data association. Also, while in the
literature points are used in feature tracking (Tomasi
and Kanade, 1991; Shi and Tomasi, 1994), to the best
of our knowledge this work is the first attempt to ad-
dress the unsupervised data association problem in
MOT by setting target objects as points.
We conduct a series of experiments on several
MOT benchmarks including MOT16, MOT17 (Mi-
lan et al., 2016) and MOT-Soccer (Fu et al., 2019)
datasets. Through the evaluations we will show that:
• CenterTracker is much more efficient than exist-
ing methods while achieving competitive MOTA
scores. Specifically, on GPU, the tracking ef-
ficiency achieves 3500-4000 FPS which is 2-4
times faster than the state-of-the-art (§4.2).
• CenterTracker run on GPU can improve the whole
MOT efficiency via reducing the overhead of
CPU-GPU data transfer between detection and
tracking (§4.3).
• CenterTracker can be combined to a state-of-
the-art unsupervised MOT method (Zhang et al.,
2020b) and can successfully improve the whole
efficiency (§4.4).
2 RELATED WORKS
2.1 Unsupervised Data Association
Efficiency is crucial for MOT due to urgent needs
from various applications such as surveillance, sports
analysis and autonomous driving, all of which ex-
ploit object trajectories as input (Murray, 2017; Wang
et al., 2019b). Existing works have addressed this
issue based on the assumptions that detection is be-
coming more accurate and video frame rate is get-
ting higher. For example, Bochinski et al. (Bochin-
ski et al., 2017) built a MOT algorithm that sim-
ply evaluates spatial overlap (i.e. Intersection-over-
Union, IoU) between object hypotheses from differ-
ent frames to associate them. Bewley et al. (Bew-
ley et al., 2016) combined motion modeling (i.e. the
Kalman filter) and graph-based optimization (i.e. the
Hungarian algorithm) with Bochinski’s approach to
improve tracking accuracy. Several following works
(Bochinski et al., 2018; Chen et al., 2018; Wojke
et al., 2017; Wojke and Bewley, 2018; Bergmann
et al., 2019) further incorporated appearance cues into
their MOT algorithms, in order to improve identity
preservation across frames under cluttered environ-
ments. While these methods are highly efficient with
respect to data association, they overlook the whole
efficiency of MOT since the core components run on
CPU while input detections are usually derived from
GPU processing. Deploying these data association
methods on GPU is one way to address the issue, but
this approach includes potential challenges since usu-
ally there are difficult parts to be parallelized (i.e. dif-
ficult to be run on GPU efficiently).
In this work we explore another way to improve
the whole efficiency of unsupervised MOT: In our
CenterTracker we modify the form of detection input
and introduce novel data association modules that can
be easily deployed in GPU. Notice that our approach
is different from supervised data association methods
(Feichtenhofer et al., 2017; Sadeghian et al., 2017;
Voigtlaender et al., 2019; Xu et al., 2019; Wang et al.,
2019a; Liu et al., 2019; Zhou et al., 2020; Bras
´
o and
Object Hypotheses as Points for Efficient Multi-Object Tracking
829

Figure 2: These scatter plots show the frame-by-frame dis-
placements of objects with different sizes in two MOT17
sequences (Milan et al., 2016). We define an object size as
the diagonal length of the object shown in the first frame.
We can clearly see bigger objects can move larger whether
a camera moves (i.e. MOT17-09) or not (i.e. MOT17-11).
Leal-Taix
´
e, 2019). In our approach we perform data
association in an unsupervised manner, which does
not require any training. We describe the detail of our
CenterTracker in §3 and compare it to existing un-
supervised data association methods (Bewley et al.,
2016; Bochinski et al., 2017) in §4.3.
There are other lines of research that also aim for
higher MOT efficiency via jointly performed detec-
tion and embedding (for data association) in one CNN
on GPU (Wang et al., 2019b; Zhang et al., 2020b;
Karthik et al., 2020). In this work we assume that
these joint detection and embedding (JDE) methods
are orthogonal to our data association: We propose
to combine them so as to achieve better tradeoffs be-
tween accuracy and efficiency. In §3.2 we will explain
how to extend our data association module to accom-
modate appearance features, and evaluate its perfor-
mance in §4.4.
2.2 Object Detector
Convolutional neural networks (CNNs) have been
a dominant approach for object detection in recent
years. CNN-based detectors can be categorized into
one-stage detectors (Redmon and Farhadi, 2018; Choi
et al., 2019) and two-stage detectors (Ren et al., 2015;
Yang et al., 2016), where one-stage methods achieve
higher efficiency while slightly sacrificing their accu-
racy. Typical one-stage detectors like YOLO (Red-
mon and Farhadi, 2018) place anchor boxes over an
image by dividing it into sparse grid units, and gener-
ate final box predictions by scoring anchor boxes and
refining their coordinates through regression. Alter-
natively, in recently proposed anchor-free one-stage
detectors (Duan et al., 2019; Zhou et al., 2019a; Zhou
et al., 2019b; Law and Deng, 2018; Tian et al., 2019),
an object is represented by a (set of ) keypoint(s)
and its location is retrieved as a peak in a heatmap
predicted by CNNs. In this anchor-free approach
corresponding object locations (e.g. bounding boxes,
segmentation) can be recovered using auxiliary CNN
outputs (e.g. object size).
In most one-stage detectors mentioned above, de-
tection results are generated as its center location and
auxiliary information, which is favorable to our pro-
posed CenterTracker that assumes the same format
of object hypothesis as input. Based on this obser-
vation, in our experiments we combine our Center-
Tracker with a popular anchor-free object detector,
CenterNet (Zhou et al., 2020), so as to build whole
MOT pipelines. While CenterTracker can potentially
be combined with other detectors, we leave this vali-
dation as our future research.
3 APPROACH
The task of multi-object tracking (MOT) is to extract
trajectories (i.e. spatial and temporal positions) of ob-
jects from a target category in a given frame sequence.
In most cases the number of objects is not known a
priori. We define a trajectory as a list of ordered ob-
ject locations T
k
= {o
t
1
k
,o
t
2
k
,...}, where o
t
k
.c ∈ R
2
is
the center of object k at time t, o
t
k
.wh ∈ R
2
is its size
(i.e. width and height) and o
t
k
.s ∈ R is the confidence
score. From each object location o, the corresponding
bounding box can be easily recovered as follows:
(x − w/2, y − h/2,x +w/2,y + h/2), (1)
where (x,y) = o.c and (w, h) = o.wh.
To fairly validate our key idea, we first build the
vanilla version of our approach, named vanilla Cen-
terTracker, by referring to the IoU Tracker (Bochin-
ski et al., 2017), which is to our knowledge one of
the most efficient MOT algorithms. Specifically, we
directly follow the trajectory deactivation scheme in
IoU Tracker
1
. Notice that this vanilla CenterTracker
does not consider motion and appearance of objects.
In §3.2 we discuss a simple extension of this algo-
rithm with respect to the appearance perspective.
3.1 Vanilla CenterTracker
The algorithm of our CenterTracker is outlined in Al-
gorithm 1. At every timestep t, our algorithm asso-
ciates a list of object hypothesis D
t
with current tra-
jectories T
active
based on spatial proximity of centers
and object size (line 3-6). Trajectories are updated,
finished or killed based on the association result (line
7-13), and the remaining hypotheses are used to ini-
tialize new tracks (line 14-16). For simplicity, in Al-
gorithm 1 we do not show the pipeline of recovering
1
If a track has shorter length than t
min
and has least one
detection with higher confident score than σ
h
, it is finished.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
830

Algorithm 1: Vanilla CenterTracker.
Data: A video sequence V = {I
1
,I
2
,...,I
L
}
and a detection sequence
D = {D
1
,D
2
,...,D
L
} with
D
t
= {o
t
1
,o
t
2
,...} is a list of object
hypothesis o
t
i
, where o
t
i
.c ∈ R
2
is its
center, o
t
i
.wh ∈ R
2
is the size (i.e.
width and height), and o
t
i
.s ∈ R is a
detection confidence
Result: A set of trajectories
T
finish
= {T
1
,T
2
,...} with
T
k
= {o
t
1
k
,...,o
t
N
k
| 0 ≤ t
1
,...,t
N
≤ L}
as an ordered list of object locations
o
t
k
1 T
active
←−
/
0, T
finish
←−
/
0
2 for t ←− 1 to L do
3 C ←−
/
0
4 for T
k
∈ T
active
do
5 C ←− T
k
[−1]
end
/* M :tuples of matched track
index and hypothesis, */
/* U:unmatched track indices,
D
∗
:remaining hypotheses */
6 M ,U,D
∗
←− associate(C,D
t
)
7 for (k, o) ∈ M do
8 T
active
[k].update(o)
end
9 for k ∈ U do
10 T ←− T
active
[k]
11 if max
o∈T
{o.s} ≥ σ
h
and
len(T ) ≥ t
min
then
12 T
finish
←− T
finish
+ T
13 T
active
←− T
active
\ T
end
end
14 for o ∈ D
∗
do
15 T ←− init track(o)
16 T
active
←− T
active
+ T
end
17 if t = L then
18 for T ∈ T
active
do
19 if max
o∈T
{o.s} ≥ σ
h
and
len(T ) ≥ t
min
then
20 T
finish
←− T
finish
+ T
end
end
end
end
a bounding box from the attributes of an object o. As
is mentioned before, this recovery is only required
just before the final output. In the following, we detail
the components of CenterTracker focusing on data as-
sociation (i.e. associate() in line 6).
Data Association: As with recent MOT approaches,
we assume video frame rates are sufficiently high and
therefore targets move only slightly between consec-
utive frames (Wojke et al., 2017; Bochinski et al.,
2017; Bochinski et al., 2018; Bergmann et al., 2019).
With this assumption the spatial proximity of centers
between a track and a hypothesis can be seen as a
strong cue to link them (Xu et al., 2020). Our ap-
proach follows the above notion in a straightforward
way: We simply evaluate L2-norms of all the pairs
of tracks and hypotheses, then choose the nearest hy-
pothesis for each track as its new center location if
the displacement is smaller than a pre-defined thresh-
old σ
disp
. When the same hypothesis are selected by
multiple tracks, the nearest track is linked to the hy-
pothesis and the remaining tracks fail to find new lo-
cations.
To further improve the matching performance, in
our approach we exploit the object scale of each track.
Intuitively, the displacement of larger objects can be
bigger in a pixel coordinate system. As shown in Fig-
ure 2, we can easily validate this intuition using the
public MOT benchmarks (Leal-Taix
´
e et al., 2015; Mi-
lan et al., 2016). Therefore, in our approach we adap-
tively set displacement thresholds (i.e. σ
disp
) for ob-
ject sizes of tracks. Specifically, we set the threshold
of track k as σ
k
disp
= σ
size
q
(w
k
−1
)
2
+ (h
k
−1
)
2
, where
(w
k
−1
,h
k
−1
) is the last object size in track k and σ
size
is another threshold. We use a simple grid search on
MOT17 training sequences to determine the best σ
size
.
Unless mentioned otherwise we set σ
size
= 0.08,
which can produce good results on other datasets (e.g.
MOT-Soccer).
Notice that graph-based optimization (e.g. the
Hungarian algorithm, the Kuhn-Munkres algorithm)
is another choice for data association based on the
spatial proximity of center locations. However, these
algorithms cannot be run in GPU efficiently since
they are difficult to parallelize. Although sophisti-
cated CPU implementations of these optimizations
are easily available, this scheme unavoidably leads
data transfer from GPU to CPU, which slows down
the whole MOT algorithm. Contrary, our proposed
method can be performed efficiently on GPU. In sec-
tion 4.1 we will perform ablation studies to validate
our data association approach.
3.2 CenterTracker+
We here extend the above vanilla CenterTracker by
combining appearance modeling techniques, result-
ing in CenterTracker+.
Object Hypotheses as Points for Efficient Multi-Object Tracking
831

Appearance Model: To avoid tracks to be frag-
mented, we exploit visual information to keep short
but highly-confident tracks active. Specifically, if
a track that cannot find a new hypothesis contains
at least one detection with higher confidence score
than σ
h
, we store the track for a fixed number of
frames while extracting a visual feature correspond-
ing the the detection. We also extract visual features
from unmatched hypotheses in the current frame, then
compare the feature in the embedding space and re-
identify via a threshold. Basically, in this scheme any
feature extractor tailored to identify the same object
can be applied. Considering the data transfer between
CPU and GPU, using embedding features extracted
from recently proposed joint detection and embed-
ding (JDE) approaches is a good choice. (Wang et al.,
2019b; Zhang et al., 2020b; Karthik et al., 2020) We
call our approach with motion and appearance mod-
eling as CenterTracker+. In §4.4 we evaluate the
method in combination with a state-of-the-art JDE
method (Zhang et al., 2020b).
4 EVALUATION
In this paper we validate our CenterTracker with re-
spect to the efficiency of CenterTracker itself (§4.2),
the efficiency of the whole tracking pipeline (§4.3)
and the compatibility with a state-of-the-art unsuper-
vised MOT approach (§4.4). We use the following
three public datasets for our experiments:
MOT16 and MOT17 (Milan et al., 2016): These
datasets from the MOTChallenge benchmarks
2
are
the most standard datasets for MOT, which include
several challenging pedestrian tracking sequences
with frequent occlusions and crowded scenes.
MOT-Soccer
3
(Fu et al., 2019): This dataset is re-
cently introduced by Fu et al., which consists of 10
clips of amateur soccer videos captured by a static
camera installed in a straight view of high position.
Different from other tracking tasks, the objects in this
dataset display smaller scale changes as well as rela-
tively similar appearance features.
Unless mentioned otherwise, we report the stan-
dard MOT metrics including MOTA (Milan et al.,
2016), IDF1 (Ristani et al., 2016), percentage of
Mostly Tracked trajectories (MT), percentage of
Mostly Lost trajectories (ML) and the number of
IDentity switches (IDs) in addition to Frames Per Sec-
ond of the whole pipeline including detection, track-
ing and data transfer (FPSW). Higher MOTA, IDF1,
2
https://motchallenge.net/
3
https://github.com/jozeeandfish/motsoccer:
Table 1: Ablations for data association on MOT17.
MOTA IDF1 FPSW
Hungarian 40.1 42.2 28.1
Direct tuning of σ
disp
41.1 43.6 30.3
Proposed 41.4 43.8 30.2
MT and FPSW are better while lower ML and IDs are
better.
4.1 Ablation Study
We first perform an ablation study with respect to
our data association module. To do so, we replace
our data association module with the Hungarian al-
gorithm, then measure its tracking accuracy and ef-
ficiency. Also, to evaluate the effect of considering
the object scales in our data association, we run an-
other algorithm in which σ
disp
(cf. §3.1 ) is directly
tuned. The results are shown in Table 1. As expected,
our proposed data association is faster than the Hun-
garian algorithm. Considering the scale information
further improves both MOTA and IDF1 without sac-
rificing the efficiency. Interestingly, our methods out-
perform Hungarian algorithm with respect to tracking
accuracy. One possible reason is that finding nearest
neighbors of centers works very well and considering
subsequent neighbors may decrease the accuracy in
MOT17 training sequences.
4.2 Efficiency of Tracking Module
Here we first evaluate our CenterTracker focusing on
the tracking module itself. To do so, we use pub-
lic detections provided by MOT17 and MOT-Soccer
datasets as input to the tracker and compare the
MOTA-FPS balance (Leal-Taix
´
e et al., 2015; Bewley
et al., 2016; Fu et al., 2019) to that of existing meth-
ods. Figure 3 (a) shows the result for MOT17 and
(b) shows the result for MOT-Soccer, respectively.
In both datasets we show the results of our Center-
Tracker run on both CPU and GPU. For MOT17 we
draw the results of the existing fastest trackers
4
from
the MOTChallenge leaderboard
5
. For MOT-Soccer
we show the results of IoUTracker (Bochinski et al.,
2017) and SORT (Bewley et al., 2016) (fastest track-
ers in MOT17) which are obtained by running official
codes
6,7
, while we directly draw the results of MF-
SORT (Fu et al., 2019) and DeepSORT (Wojke et al.,
2017) from the dataset paper (Fu et al., 2019). From
both results, our CenterTracker achieves the fastest
4
We do not include anonymous submissions.
5
https://motchallenge.net/results/MOT17/
6
https://github.com/bochinski/iou-tracker
7
https://github.com/abewley/sort
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
832

(a) MOT17 (b) MOT-Soccer
34 36 38 40 42 44 46 48 50 52
MOTA
10
1
10
2
10
3
10
4
Speed [Hz]
CenterTracker(GPU)
CenterTracker(CPU)
IOU17
SORT17
EDA GNN
GM
PHD
GMPHD
Rd17
GMPHDOGM17
DAM MOT
MOTDT17
94 95 96 97
MOTA
10
1
10
2
10
3
10
4
Speed [Hz]
CenterTracker(GPU)
CenterTracker(CPU)
IoUTracker
SORT
MF-SORT
DeepSORT
Figure 3: MOTA-FPS balances for MOT17 (a) and MOT-Soccer (b) datasets. CenterTracker (CPU) represents our proposed
tracker implemented on CPU, while CenterTracker (GPU) is implemented on GPU. For MOT17 results of existing trackers
are drawn from the MOTChallenge leaderboard. For MOT-Soccer we run IoUTracker and SORT by ourselves while drawing
results of other trackers from the dataset paper (Fu et al., 2019).
among the competitors while maintaining reasonable
MOTA scores. While CenterTracker on CPU can al-
ready be run very fast (> 3000 FPS on MOT17 and
> 2500 FPS on MOT-Soccer), it is further accelerated
by GPU (> 4000 FPS on MOT17 and > 3500 FPS on
MOT-Soccer), which are about 2-4 times faster than
the faster existing tracker (i.e. IoUTracker). These
results indicate the efficiency of our CenterTracker it-
self.
4.3 Efficiency of Whole Tracking
Pipeline
When our CenterTracker is combined with an effi-
cient detector and they are both run on GPU, we can
directly feed the detection results to CenterTracker
without any CPU-GPU data transfer, which should
also improve the whole efficiency of MOT. We exper-
imentally validate the effect using the MOT-Soccer
dataset. Specifically, we build a whole MOT pipeline
using CenterNet (Zhou et al., 2019a) as a detec-
tor and our CenterTracker as a tracker, then evalu-
ate the whole running times of MOT including de-
tection, tracking and data transfer by switching the
hardware on which the tracker is run. For CenterNet,
we use the ResNet-18 backbone finetuned with im-
ages in MOT-Soccer training sequences. Following
the recent MOT protocols (Wang et al., 2019b; Zhou
et al., 2020; Zhang et al., 2020b; Karthik et al., 2020),
we resize every frame to 1088 × 608 and feed it to
the detector. To perform comparison, we also build
other MOT pipelines by replacing CenterTracker with
IoUTracker (Bochinski et al., 2017) and SORT (Bew-
ley et al., 2016), both of which are run on CPU. The
results are shown in Figure 4 and Table 2. Notice that
in all the cases detection is performed on GPU. From
Table 2 our CenterTracker achieves 88.8 MOTA score
and 89.0 IDF1 score in 36.4 FPS, which is more effi-
cient than alternatives while keeping almost the same
MOT scores with them. From Figure 4, we can see
CenterTracker (orange bars in Figure 4) is acceler-
ated by GPU, and more importantly, the elapsed time
for data transfer (green bars) is almost halved by di-
rectly feeding detections to CenterTracker among the
GPU memory. This result indicates that our Center-
Tracker can contribute to reducing the overhead of
MOT pipelines and improve efficiency as a whole.
4.4 Compatibility with State-of-the-Art
As mentioned in §3.2, our CenterTracker can be
combined with the state-of-the-art MOT methods us-
ing unsupervised data association. In this paper we
adopt FairMOT (Zhang et al., 2020b) as a testbed
and replace its data association module to our Cen-
terTracker+. We choose FairMOT due to its excel-
lent balance between tracking performance and effi-
ciency. We use MOT16, MOT17 and MOT-Soccer
datasets for comparison and results are shown in Ta-
ble 3. For MOT16 and MOT17 we use the DLA-34
backbone with provided weight parameters for detec-
tion and embedding. For MOT-Soccer we also use the
DLA-34 backbone while its parameters are finetuned
with MOT-Soccer training sequences. From Table 3
Object Hypotheses as Points for Efficient Multi-Object Tracking
833
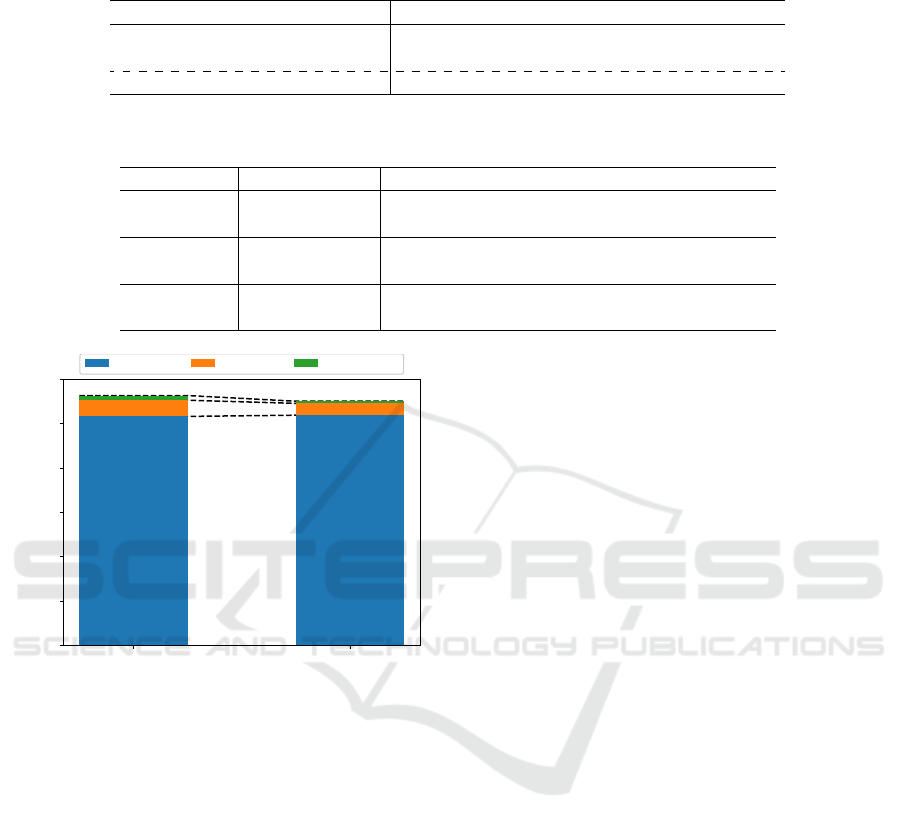
Table 2: Tracking performance on the MOT-Soccer (Fu et al., 2019) test dataset. In all the settings we use CenterNet (Zhou
et al., 2019a) with ResNet-18 backbone finetuned by the MOT-Soccer train sequences as the person detector.
Tracker MOTA↑ IDF1↑ MT↑ ML↓ IDs↓ FPSW↑
IoUTracker (Bewley et al., 2016) 88.7 89.3 93.5 1.0 160 34.5
SORT (Bewley et al., 2016) 88.4 89.5 94.5 1.0 156 31.2
CenterTracker (GPU) 88.8 89.0 93.5 1.0 157 36.4
Table 3: We replace the data association module of FairMOT (Zhang et al., 2020b) to our CenterTracker and compare both
tracking performance and efficiency on MOT16, MOT17 and MOT-Soccer datasets.
Dataset Tracker MOTA↑ IDF1↑ MT↑ ML↓ IDs↓ FPSW↑
MOT16
FairMOT 68.7 70.4 39.5 19.0 953 23.4
CenterTracker+ 68.1 68.6 34.8 19.0 1021 27.8
MOT17
FairMOT 67.5 69.8 37.7 20.8 2868 23.4
CenterTracker+ 66.7 68.5 35.0 21.2 2934 27.8
MOT-Soccer
FairMOT 89.6 90.5 95.4 1.0 147 22.1
CenterTracker+ 89.2 89.5 93.5 1.0 154 27.1
CPU GPU
0
20
40
60
80
100
120
Elapsed time [s]
Detection
Tracking
Data Transfer
Figure 4: Total elapsed times [s] for tracking all the test se-
quences in MOT-Soccer (Fu et al., 2019) dataset when Cen-
terTracker is implemented on CPU (left) and GPU (right).
In both cases detection results are generated by CenterNet
(Zhou et al., 2019a) run on GPU and finetuned with MOT-
Soccer training images. Notice that in the GPU case detec-
tions are passed to CenterTracker without GPU-CPU data
transfer.
we can see the efficiency (i.e. FPSW) is improved
in all the datasets with minimum sacrifice of tracking
performance.
5 CONCLUSION
In this work we proposed an efficient data association
algorithms named CenterTracker that are friendly for
GPU processing and help minimize the overhead of
MOT pipelines due to unnecessary data transfer be-
tween CPU and GPU. Our experiments on MOT16,
MOT17 and MOT-Soccer datasets showed that our
CenterTracker is much more efficient than existing
trackers, and can successfully improve the whole
MOT efficiency by directly feeding detection results
to our tracking module without GPU-CPU data trans-
fer. Also, we showed that CenterTracker can be com-
bined with a state-of-the-art unsupervised MOT algo-
rithm (Zhang et al., 2020b) and improve its efficiency
with minimum sacrifice of MOT scores.
In the future we will further evaluate our approach
on different datasets, different settings (e.g. com-
bined with other detectors than CenterNet(Zhou et al.,
2019a)) and different objects (Zhu et al., 2018; Den-
dorfer et al., 2020). We will also explore the ways to
further improve our data association algorithms that
can improve both MOT metrics and efficiency.
REFERENCES
Alldieck, T., Bahnsen, C. H., and Moeslund, T. B. (2016).
Context-aware fusion of rgb and thermal imagery for
traffic monitoring. Sensors.
Bergmann, P., Meinhardt, T., and Leal-Taix
´
e, L. (2019).
Tracking without bells and whistles. In ICCV.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In ICIP.
Bochinski, E., Eiselein, V., and Sikora, T. (2017). High-
speed tracking-by-detection without using image in-
formation. In AVSS Workshop.
Bochinski, E., Senst, T., and Sikora, T. (2018). Extending
iou based multi-object tracking by visual information.
In AVSS.
Bras
´
o, G. and Leal-Taix
´
e, L. (2019). Learning a neural
solver for multiple object tracking. arXiv preprint
arXiv:1912.07515.
Chen, L., Ai, H., Zhuang, Z., and Shang, C. (2018). Real-
time multiple people tracking with deeply learned
candidate selection and person re-identification. In
ICME.
Choi, J., Chun, D., Kim, H., and Lee, H.-J. (2019). Gaus-
sian yolov3: An accurate and fast object detector us-
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
834

ing localization uncertainty for autonomous driving.
In ICCV.
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cremers,
D., Reid, I., Roth, S., Schindler, K., and Leal-Taix
´
e, L.
(2020). Mot20: A benchmark for multi object tracking
in crowded scenes. arXiv preprint arXiv:2003.09003.
Duan, K., Bai, S., Xie, L., Qi, H., Huang, Q., and Tian, Q.
(2019). Centernet: Keypoint triplets for object detec-
tion. In CVPR.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2017). De-
tect to track and track to detect. In ICCV.
Fu, H., Wu, L., Jian, M., Yang, Y., and Wang, X. (2019).
Mf-sort: Simple online and realtime tracking with mo-
tion features.
Karthik, S., Prabhu, A., and Gandhi, V. (2020). Simple
unsupervised multi-object tracking. arXiv preprint
arXiv:2006.02609.
Kim, C., Li, F., Ciptadi, A., and Rehg, J. M. (2015). Multi-
ple hypothesis tracking revisited. In ICCV.
Law, H. and Deng, J. (2018). Cornernet: Detecting objects
as paired keypoints. In ECCV.
Leal-Taix
´
e, L., Milan, A., Reid, I., Roth, S., and Schindler,
K. (2015). Motchallenge 2015: Towards a bench-
mark for multi-target tracking. arXiv preprint
arXiv:1504.01942.
Liang, L., Shen, H., Rompolas, P., Greco, V., Camilli, P. D.,
and Duncan, J. S. (2013). A multiple hypothesis based
method for particle tracking and its extension for cell
segmentation. In Inf Process Med Imaging.
Liu, Q., Liu, B., Wu, Y., Li, W., and Yu, N. (2019). Real-
time online multi-object tracking in compressed do-
main. IEEE Access.
Meirovitch, Y., Mi, L., Saribekyan, H., Matveev, A., Rol-
nick, D., and Shavit, N. (2019). Cross-classification
clustering: An efficient multi-object tracking tech-
nique for 3-d instance segmentation in connectomics.
In CVPR.
Milan, A., Leal-Taix
´
e, L., Reid, I., Roth, S., and Schindler,
K. (2016). Mot16: A benchmark for multi-object
tracking. arXiv preprint arXiv:1603.00831.
Murray, S. (2017). Real-time multiple object tracking -
a study on the importance of speed. arXiv preprint
arXiv:1709.03572.
O
˘
sep, A., Mehner, W., Mathias, M., and Leibe, B. (2017).
Combined image- and world-space tracking in traffic
scenes. In ICRA.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. In arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In NIPS.
Ristani, E., Solera, F., Zou, R. S., Cucchiara, R., and
Tomasi, C. (2016). Performance measures and a data
set for multi-target, multi-camera tracking. In ECCV
Workshop.
Sadeghian, A., Alahi, A., and Savarese, S. (2017). Tracking
the untrackable: Learning to track multiple cues with
long-term dependencies. In ICCV.
Shi, J. and Tomasi, C. (1994). Good features to track. In
CVPR.
Sun, S., Akhtar, N., Song, H., Mian, A., and Shah, M.
(2018). Deep affinity network for multiple object
tracking. TPAMI.
Tang, S., Andres, B., Andriluka, M., and Schiele, B. (2016).
Multi-person tracking by multicut and deep matching.
In ECCV.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). Fcos: Fully
convolutional one-stage object detection. In ICCV.
Tomasi, C. and Kanade, T. (1991). Detection and tracking
of point features. Technical report, Technical Report
CMU-CS-91-132, Carnegie Mellon University.
Voigtlaender, P., Krause, M.,
˘
Osep, A., and Luiten, J.
(2019). Mots: Multi-object tracking and segmenta-
tion. In CVPR.
Wang, G., Wang, Y., Zhang, H., Gu, R., and Hwang, J.-N.
(2019a). Exploit the connectivity: Multi-object track-
ing with trackletnet. In ACMMM.
Wang, Z., Zheng, L., Liu, Y., and Wang, S. (2019b). To-
wards real-time multi-object tracking. arXiv preprint
arxiv:1909.12605.
Wojke, N. and Bewley, A. (2018). Deep cosine metric learn-
ing for person re-identification. In WACV.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In ICIP.
Xu, J., Cao, Y., Zhang, Z., and Hu, H. (2019). Spatial-
temporal relation networks for multi-object tracking.
In ICCV.
Xu, Y., Ban, O. Y., Horaud, R., Leal-Taix
´
e, L., and
Alameda-Pineda, X. (2020). How to train your deep
multi-object tracker. In CVPR.
Yang, F., Choi, W., and Lin, Y. (2016). Exploit all the lay-
ers: Fast and accurate cnn object detector with scale
dependent pooling and cascaded rejection classifiers.
In CVPR.
Zhang, R., Wu, L., Yang, Y., Wu, W., Chen, W. Y., and
Xu, M. (2020a). Multi-camera multi-player tracking
with deep player identification in sports video. Pattern
Recognition.
Zhang, Y., Wang, C., Wang, X., Zeng, W., and Liu, W.
(2020b). A simple baseline for multi-object tracking.
arXiv preprint arXiv:2004.01888.
Zhou, X., Koltun, V., and Kr
¨
ahenb
¨
uhl, P. (2020). Tracking
objects as points. arXiv preprint arXiv:2004.01177.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019a). Objects
as points. In arXiv preprint arXiv:1904.07850.
Zhou, X., Zhuo, J., and Kr
¨
ahenb
¨
uhl, P. (2019b). Bottom-
up object detection by grouping extreme and center
points. In CVPR.
Zhu, P., Wen, L., Bian, X., Ling, H., and Hu, Q. (2018).
Vision meets drones: A challenge. arXiv preprint
arXiv:1804.07437.
Object Hypotheses as Points for Efficient Multi-Object Tracking
835
