
Multi-layer Feature Fusion and Selection from Convolutional Neural
Networks for Texture Classification
Hajer Fradi
1
, Anis Fradi
2,3
and Jean-Luc Dugelay
1
1
Digital Security Department, EURECOM, Sophia Antipolis, France
2
University of Clermont Auvergne, CNRS LIMOS, Clermont-Ferrand, France
3
University of Monastir, Faculty of Sciences of Monastir, Tunisia
Keywords:
Texture Classification, Feature Extraction, Feature Selection, Discriminative Features, Convolutional Layers.
Abstract:
Deep feature representation in Convolutional Neural Networks (CNN) can act as a set of feature extractors.
However, since CNN architectures embed different representations at different abstraction levels, it is not
trivial to choose the most relevant layers for a given classification task. For instance, for texture classification,
low-level patterns and fine details from intermediate layers could be more relevant than high-level semantic
information from top layers (commonly used for generic classification). In this paper, we address this problem
by aggregating CNN activations from different convolutional layers and encoding them into a single feature
vector after applying a pooling operation. The proposed approach also involves a feature selection step. This
process is favorable for the classification accuracy since the influence of irrelevant features is minimized
and the final dimension is reduced. The extracted and selected features from multiple layers can be further
manageable by a classifier. The proposed approach is evaluated on three challenging datasets, and the results
demonstrate the effectiveness of selecting and fusing multi-layer features for texture classification problem.
Furthermore, by means of comparisons to other existing methods, we demonstrate that the proposed approach
outperforms the state-of-the-art methods with a significant margin.
1 INTRODUCTION
Deep networks have promoted the research in many
computer vision applications, specifically a great suc-
cess has recently been achieved in the field of im-
age classification using deep learning models. In this
context, extensive study has been conducted to ad-
dress the problem of large-scale and generic classi-
fication that spans a large number of classes and im-
ages (such as the case of ImageNet Large Scale Vi-
sual Recognition Challenge) (Qu et al., 2016). Partic-
ularly, the problem of texture classification has been
a long-standing research topic due to both its signifi-
cant role in understanding the texture recognition pro-
cess and its importance in a wide range of applica-
tions including medical imaging, document analysis,
object recognition, fingerprint recognition, and mate-
rial classification (Liu et al., 2019).
Even though texture classification is similar to
other classification problems, it presents some distinct
challenges since it has to deal with potential intraclass
variations such as randomness and periodicity, in ad-
dition to external class variations in real-world images
such as noise, scale, illumination, rotation, and trans-
lation. Due to these variations, the texture of the same
objects appears visually different. Likewise, for dif-
ferent texture patterns, the difference might be subtle
and fine. All these factors besides the large number
of texture classes make the problem of texture classi-
fication challenging (Bu et al., 2019; Almakady et al.,
2020; Alkhatib and Hafiane, 2019).
One of the key aspects of texture analysis is the
features extraction step which aims at building a pow-
erful texture representation that is useful for the clas-
sification task. Texture, by definition, is a visual cue
that provides useful information to recognize regions
and objects of interest. It refers to the appearance, the
structure and the arrangement or the spatial organi-
zation of a set of basic elements or primitives within
the image. Since the extraction of powerful features
to encode the underlying texture structure is of great
interest to the success of the classification task, many
research works in this field focus on the texture repre-
sentation (Lin and Maji, 2015; Liu et al., 2019).
This topic has been extensively studied through
different texture features such as filter bank texton
(Varma and Zisserman, 2005), Local Binary Pattern
(LBP) (Wang et al., 2017; Alkhatib and Hafiane,
574
Fradi, H., Fradi, A. and Dugelay, J.
Multi-layer Feature Fusion and Selection from Convolutional Neural Networks for Texture Classification.
DOI: 10.5220/0010388105740581
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 4: VISAPP, pages
574-581
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2019), Bag-of-Words (BoWs) (Quan et al., 2014) and
their variants e.g. Fisher Vector (FV) (Cimpoi et al.,
2014; Yang Song et al., 2015) and VLAD (J
´
egou
et al., 2010). Early attempts to handle this prob-
lem generally substitute these hand-engineered fea-
tures by deep learning models particularly based on
Convolutional Neural Network (CNN). According to
a recently published survey (Liu et al., 2019), CNN-
based methods for texture representation can be cate-
gorized into three categories: pre-trained CNN mod-
els, fine-tuned CNN models, and hand-crafted deep
convolutional networks. Such architectures mostly re-
quire large-scale datasets because of the huge number
of parameters that have to be trained. Since they can-
not be conveniently trained on small datasets, transfer
learning (Zheng et al., 2016) can be instead used as
an effective method to handle that. Typically, a CNN
model previously trained on a large external dataset
for a given classification task can be fine-tuned for
another classification task. Such pre-trained deep fea-
tures take advantage of the large-scale training data.
Thus, they have shown good performance in many ap-
plications (Yang et al., 2015).
In both transfer and non-transfer classification
tasks, CNNs have been proven to be effective in
automatically learning powerful feature representa-
tion that achieves superior results compared to hand-
crafted features (Schonberger et al., 2017). Although
this approach has shown promising results for differ-
ent classification tasks, some problems remain unad-
dressed. For instance, features from the fully con-
nected (FC) layers are usually used for classifica-
tion. However, these FC features discard local in-
formation which is of significant interest in the clas-
sification since it aims at finding local discrimina-
tive cues. Major attempts to handle this problem
alternatively substitute FC with convolutional fea-
tures, mostly extracted from one specific convolu-
tional layer. But the exact choice of the convolutional
layer remains particularly unclear. Usually, high-
level features from the last convolutional layer are ex-
tracted since they are less dependent on the dataset
compared to those extracted from lower layers. How-
ever, it has been shown in other applications such as
image retrieval (Jun et al., 2019; Tzelepi and Tefas,
2018; Kordopatis-Zilos et al., 2017) that intermediate
layers mostly perform better than last layers.
Following the same strategy, we intend in this cur-
rent paper to first investigate the representative power
of different convolutional layers for exhibiting rel-
evant texture features. Then, fusion and selection
methods are adopted in order to automatically com-
bine the extracted features from different layers and
to highlight the most relevant ones for the classifica-
tion task. The contribution of this paper is three-fold:
First, a novel approach for extracting and fusing fea-
tures from multiple layers into a joint feature repre-
sentation after applying a pooling operation is pro-
posed. This feature representation is adopted to in-
corporate the full capability of the network in the fea-
ture learning process instead of truncating the CNN
pipeline at one specific layer (usually chosen empir-
ically). Second, since the fused features do not per-
form equally well and some of them are more rele-
vant than others, the proposed approach incorporates
a feature selection step in order to enhance the dis-
criminative power of the feature representation. By
alleviating the effect of high dimensional feature vec-
tor and by discarding the impact of irrelevant features,
the overall classification rate is significantly improved
using three challenging datasets for texture classifi-
cation. Third, by means of comparisons to existing
methods, the effectiveness of our proposed approach
is proven. The obtained results outperform the cur-
rent state-of-the-art methods, which proves the gener-
alization ability and the representative capacity of the
learned and selected features from multiple layers.
The remainder of the paper is organized as fol-
lows: Related work to texture classification using
deep learning models is presented in Section 2. In
Section 3, our proposed approach based on feature
fusion and selection from multiple convolutional lay-
ers is presented. The proposed approach is evaluated
using three challenging datasets, commonly used for
texture classification and experimental results are an-
alyzed in Section 4. Finally, we conclude and present
some potential future works in Section 5.
2 RELATED WORK
Deep learning models have recently shown good per-
formances in different applications, essentially for
image classification by means of CNNs. Particularly,
different architectures have been proposed for texture
classification (Liu et al., 2019). The existing methods
based on FC layers mainly include FC-CNN (Cim-
poi et al., 2014), which is the top output from the last
FC layer of VGG-16 architecture. Given the limita-
tions of FC features (discussed in the introduction),
major attempts in this field instead made use of con-
volutional features. For instance, in (Cimpoi et al.,
2015; Cimpoi et al., 2016), the authors introduced FV-
CNN descriptor which is obtained using Fisher Vec-
tor to aggregate the convolutional features extracted
from VGG-16. This descriptor is suitable for texture
classification since it is orderless pooled. FV-CNN
substantially improved the state-of-the-art in texture
and materials by obtaining better performances com-
pared to FC-CNN descriptor, but it is not trained in an
Multi-layer Feature Fusion and Selection from Convolutional Neural Networks for Texture Classification
575

end-to-end manner.
Lin et al. in (Lin and Maji, 2015; Lin et al., 2015)
proposed the bilinear CNN (B-CNN), which consists
in feeding the convolutional features to bilinear pool-
ing. It multiplies the outputs of two feature extrac-
tors using outer product at each location of the im-
age. This model is close to Fisher vectors but has the
advantage of the bilinear form that simplifies gradi-
ent computation. It also allows an end-to-end training
of both networks using image labels only. Both pre-
vious related works based on FV-CNN and B-CNN
made use of pre-trained VGG models as the base net-
work, but they further apply different encoding tech-
niques which are FV and bilinear encoding. These
descriptors are computed by the respective encoding
technique from the last convolutional layer of the pre-
trained model, which shows better performances than
the results from the penultimate fully connected layer.
Zhang et al. in (Zhang et al., 2017) proposed a
Deep Texture Encoding Network (Deep-TEN) with a
novel Encoding Layer integrated on the top of con-
volutional layers, which ports the entire dictionary
learning and encoding pipeline into a single model.
Different from other methods built from distinct com-
ponents such as pre-trained CNN features, Deep-TEN
provides an end-to-end learning framework, where
the inherent visual vocabularies are directly learned
from the loss function. Following the same scheme,
Locally-transferred Fisher Vectors (LFV) which in-
volve a multi-layer neural network model, have been
proposed in (Song et al., 2017). It contains locally
connected layers to transform the input FV descrip-
tors with filters of locally shared weights. Finally,
in (Bu et al., 2019), convolutional layer activations
are employed to constitute a powerful descriptor for
texture classification under an end-to-end learning
framework. Different from the previous works, a
locality-aware coding layer is designed with the local-
ity constraint, where the dictionary and the encoding
representation are learned simultaneously.
3 FEATURE EXTRACTION FOR
TEXTURE CLASSIFICATION
Deep learning has reformed machine learning field
and has brought a revolution to the computer vision
community in recent years. Particularly, good perfor-
mance has been achieved in image classification by
means of CNNs. In this context, different architec-
tures have been proposed so far, composed of many
layers organized in a hierarchical way, where each
layer adds certain abstraction level to the overall fea-
ture representation (Nanni et al., 2017).
Deep feature representations in these networks
can act as a set of feature extractors which have the
potential of being representative and generic enough
with the increasing depth of layers. They encode from
bottom to top layers, low-level to more semantic fea-
tures. Thus, it is not trivial to choose the most rel-
evant layers for a given classification problem. For
example, in generic classification tasks, features from
top layers are commonly used because they capture
semantic information which is more relevant for this
kind of applications. However, for texture classifica-
tion, low-level patterns and fine details from bottom
or intermediate layers could be more important than
high-level semantic information.
For the aforementioned reasons, instead of em-
pirically choosing one specific layer for the classifi-
cation task, we first attempt to learn different visual
representations by fusing convolutional features from
multiple layers for complementary aspect, see section
3.1. Then, we apply a feature selection process to
encode multi-layer features into a single feature vec-
tor by finding low-dimensional representation that en-
hances the overall classification performance, see sec-
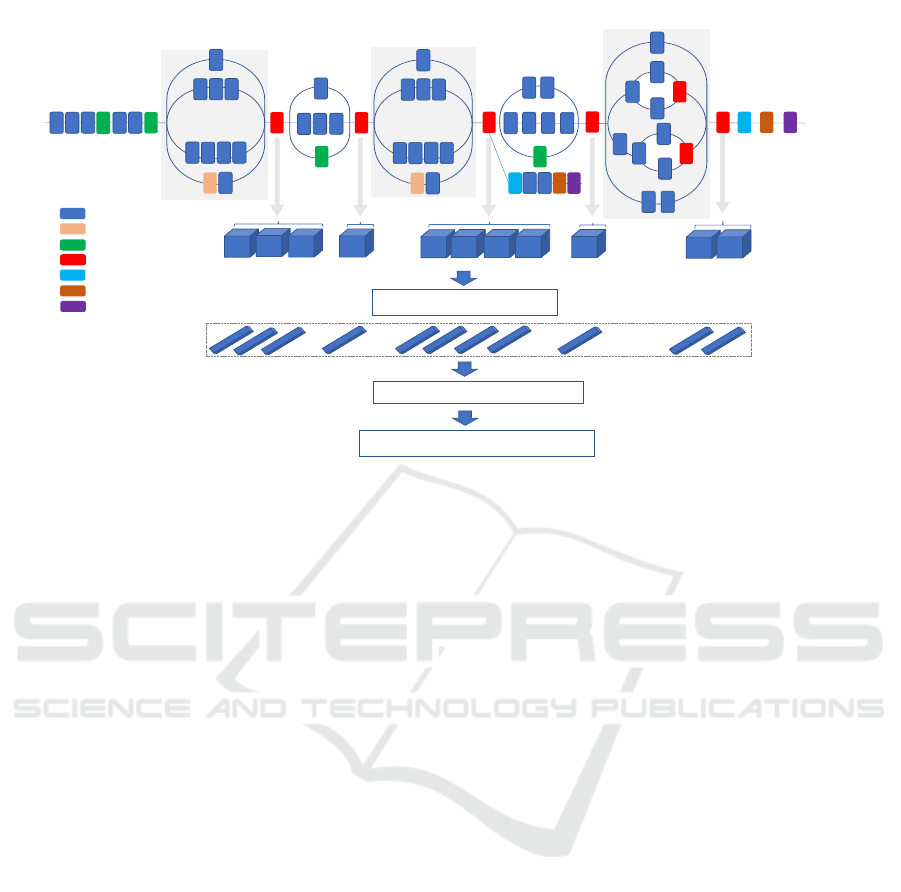
tion 3.2. An overview of the proposed approach based
on fusion and selection steps from multiple layers is
shown in Fig. 1.
3.1 Multi-layer Convolutional Feature
Fusion
Given a CNN model C of L convolutional layers
{L
1
, L
2
, ..., L
L
}, an input image I is forward prop-
agated through the network C , which results differ-
ent numbers of feature maps at each layer. The gen-
erated feature maps are denoted by M
1
, M
2
, ..., M
L
,
M
i
∈ R
n
i
xm
i
xc
i
, where n
i
x m
i
is the dimension of
channels and c
i
refers to the number of filters in L
i
convolutional layer. These feature maps from differ-
ent layers have different dimensions, that are usually
high. Since high dimensional feature vector increases
the computation time of classification, pooling layers
that follow convolutional layers are preferred to re-
duce the dimensionality. Practically, from each layer
L
i
, the feature vector F
i
is extracted by applying aver-
age or maximum pooling operation on every channel
of feature maps M
i
to get a single value. F
i
is defined
for both cases (average and maximum pooling) as:
F
i
(k) =
1
n
i
xm
i
n
i
∑
p=1
m
i
∑
q=1
M
i
(p, q, k), k = 1, ..., c
i
(1)
F
i
(k) = max M
i
(:, :, k), k = 1, ..., c
i
(2)
From each convolutional layer L
i
, the resulting fea-
ture vector F
i
is of size c
i
. As a result, a set of fea-
ture vectors {F
1
, ..., F
L
} is obtained to encode the in-
put image I. These features from different layers are
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
576
Convolution
AvgPool
MaxPool
Concat
Dropout
Fully connected
Softmax
x3
x4
x2
3 x Inception Module A
4 x Inception Module B
2 x Inception Module C
Average/Max Pooling
Convolutional Feature Fusion
Convolutional Feature Selection
Feature maps
M
1,
M
2,…..,
M
L
Feature vectors
F
1,
F
2,…..,
F
L
n
i
m
i
c
i
Figure 1: The proposed approach for texture feature extraction based on convolutional features fusion and selection using
Inception-v3 architecture for illustrative purpose, which can readily be replaced by other CNN architectures. Note that feature
maps and feature vectors visualized in this figure are of different sizes.
normalized using L2-norm before concatenating them
into a single feature vector.
Our approach is applicable to various convolu-
tional neural network architectures. Note that by in-
creasing the depth of layers, the network usually get
better feature representation, but its complexity is in-
creased. For this reason, we choose to experiment
Inception-v3 architecture (Szegedy et al., 2016) as a
good compromise between the depth of layers and the
complexity of network (23.8M parameters). For more
details, Inception architecture was initially introduced
by Szegedy et al. in (Szegedy et al., 2015). It is es-
sentially based on using variable filter sizes to capture
different sizes of visual patterns. Specifically, incep-
tion architecture includes 1 x 1 convolutions which
are placed before 3 x 3 and 5 x 5 convolutions to
act as dimension reduction modules, which enables
increasing the depth of CNN without increasing the
computational complexity. Following the same strat-
egy, the representation size of Inception-v3 (Szegedy
et al., 2016) is slightly decreased from inputs to out-
puts by balancing the number of filters per layer and
the depth of the network without much loss in the rep-
resentation power.
Inception-v3 is a 48-layers deep convolutional ar-
chitecture that first consists of few regular convo-
lutional and max-pooling layers. The network fol-
lows by three blocks of Inception layers separated by
two grid reduction modules. After that, the output
of the last Inception block is aggregated via global
average-pooling followed by a FC layer. Based on
this architecture features can be extracted from multi-
ple layers, precisely we choose them from ‘mixed0’
to ‘mixed10’ layers, as shown in Fig. 1. Obvi-
ously, other CNN architectures can be readily em-
ployed such as Inception-v4 and Inception-ResNet-v2
(Szegedy et al., 2017), but their computational cost is
higher (55.8M). For shallower architectures, VGG-19
(Simonyan and Zisserman, 2015) can be selected.
3.2 Multi-layer Convolutional Feature
Selection
Instead of using raw features from multiple layers to
encode texture information, we propose to learn a dis-
criminant subspace of the concatenated feature vector,
where samples of different texture patterns are opti-
mally separated. For instance, using Inception-v3 for
convolutional feature extractors and after applying av-
erage or maximum pooling operation, the final repre-
sentation from multiple layers is of size 10048. By
directly classifying such relatively high-dimensional
feature vector, apart the fact that the computation
time increases, another problem that might incur is
that the feature vector generally contains some com-
ponents irrelevant to texture. Thus, the use of the
whole feature vector without any feature selection
process could lead to unsatisfactory classification per-
formance (Fradi et al., 2018).
For these reasons, after stacking features from
multiple layers and before feeding them into a classi-
fier, we propose the combination of Principle Compo-
Multi-layer Feature Fusion and Selection from Convolutional Neural Networks for Texture Classification
577

nent Analysis (PCA) and Linear Discriminant Analy-
sis (LDA) to find a low dimensional discriminative
subspace in which same-texture-pattern samples are
projected close to each other while different texture-
pattern samples are projected further apart. This pro-
cess is favorable for the later texture classification step
since the influence of irrelevant feature components is
minimized. It is important to mention that this com-
bination of PCA followed by LDA has been mainly
used in face recognition domain and is commonly re-
ferred as “Fisherface”. But, to the best of our knowl-
edge, such feature selection method is applied for the
first time on multi-layer convolutional features in or-
der to enhance their discriminative power.
Linear Discriminant Analysis is an efficient ap-
proach of dimensionality reduction widely used in
various classification problems. It basically aims at
finding an optimized projection W
opt
that projects
D dimensional data vectors U into a d dimensional
space by: V = W
opt
U, in which the intra-class scatter
(S
W
) is minimized while the inter-class scatter (S
B
) is
maximized. W
opt
is obtained according to the objec-
tive function:
W
opt
= arg max
W
W
T
S
B
W
W
T
S
W
W
= [w
1
, . . . , w
g
] (3)
There are at most N − 1 non-zero generalized eigen-
values (N is the number of classes), thus g is upper-
bounded by N − 1. Since S
W
is often singular, it is
common to first apply PCA (Jolliffe, 2002) to reduce
the dimension of the original vector. Once the di-
mensionality reduction process of PCA followed by
LDA is applied on the concatenated feature vector
from multiple convolutional layers, texture classifica-
tion is performed by adopting multi-class SVM fol-
lowing one-vs-one strategy.
4 EXPERIMENTAL RESULTS
4.1 Datasets and Experiments
The proposed approach is evaluated within three chal-
lenging datasets widely used for texture classifica-
tion, namely Flickr Material Database (FMD) (Sha-
ran et al., 2010), Describable Textures Dataset (DTD)
(Cimpoi et al., 2014) and KTH-TIPS2 (Mallikarjuna
et al., 2006). FMD is a well known dataset for texture
classification that includes 10 different materiel cate-
gories with 100 images in each class. It focuses on
identifying materials such as plastic, wood and glass.
During experiments, half of images are randomly se-
lected for training and the other half for testing. KTH-
TIPS2 is a database of materials, and is an extension
of KTH-TIPS database where TIPS refers to Textures
under varying Illumination, Pose and Scale. It con-
tains images of 11 material classes, with 432 images
for each class. The images in each class are divided
into four samples of different scales (each sample
contains 108 images). Following the standard pro-
tocol, one sample is used for training and the three
remaining ones are used for testing.
DTD is another widely used dataset to assess tex-
ture classification algorithms, that contains 5640 im-
ages belonging to 47 texture classes, with 120 images
for each class. This dataset is considered as the most
challenging one since it has varying size of images
and some of them are natural images. Following the
evaluation protocol published with this dataset, 2/3 of
the images are used for training and the remaining 1/3
for testing. In Fig. 2, we show some sample images
of different texture classes from the three aforemen-
tioned datasets.
The proposed approach presented in Section 3
is evaluated for texture classification. This multi-
classification problem is a 10-class, 47-class and 11-
class for FMD, DTD and KTH-TIPS2 datasets, re-
spectively. For tests, the proposed feature represen-
tation from multiple layers is identified as one of the
classes by multi-class SVM classifier following one-
vs-one strategy using linear kernel. Following the
evaluation protocols published with the datasets, the
experiments are repeated and the average top-1 iden-
tification accuracy is reported. Also, cross-validation
to optimize PCA parameters within the training set is
adopted.
The obtained results of the proposed approach are
compared to the baseline method (Inception-v3) in
order to demonstrate the representative and the dis-
criminative power of the proposed feature represen-
tation. For feature selection, the proposed method
is compared to two other methods: PCA and Neigh-
bourhood Components Analysis (NCA) (Yang et al.,
2012). Furthermore, extensive comparative study is
conducted in order to highlight the effectiveness of
the proposed approach regarding the state-of-the-art
methods for texture classification, namely, FC-CNN
(Cimpoi et al., 2014) , FV-CNN (Cimpoi et al., 2015),
B-CNN (Lin and Maji, 2015), Deep-TEN (Zhang
et al., 2017), LFV-CNN (Song et al., 2017), and (Bu
et al., 2019).
4.2 Results and Analysis
In this section, we first intend to investigate the ef-
fect of different layers on the performance of convo-
lutional features using Inception-v3 architecture. The
classification accuracies obtained for each convolu-
tional layer (from ‘mixed0’ to ‘mixed10’) on the three
datasets are reported in Fig. 3.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
578

FMD
Metal Plastic Stone
DTD
Dotted Grid Blotchy
KTH
Aliminium Wool Cotton
Figure 2: Sample images from the three experimented datasets: From top to bottom: FMD, DTD and KTH-TIPS2 datasets.
From left to right: 3 examples of classes for each dataset (3 image examples for each class) to show the variations within each
class and the low external class variations in some cases.
First, we notice that average pooling significantly
outperforms maximum pooling on the three datasets.
For this reason average pooling operator is retained
in the next experiments. Not surprisingly, it is shown
from the obtained results that the assumption of last
layers would give the best performance is not always
true. In many cases, it is clear that intermediate lay-
ers perform better than the last layer. The best re-
sults are 82.8%, 72.52%, and 79.46% obtained from
‘mixed9’, ‘mixed7’, and ‘mixed5’ layers for FMD,
DTD and KTH, respectively. Likewise for FC lay-
ers, the obtained classification accuracies are 81.80%,
70.03%, and 74.47% for the three datasets. By com-
paring these results to those shown in Fig. 3, in many
cases results from convolutional layers exceed those
obtained from FC layers. These observations com-
ply with our main proposal, and justify that the auto-
matic fusion and selection strategy from different lay-
ers adopted in this paper could be effective to improve
the overall performance.
In Fig. 4, we report the classification results of
our proposed approach on the three datasets. To jus-
tify the effectiveness of each component from the pro-
posed approach, we first compare the obtained results
to the results of the baseline Inception-v3 architec-
ture (using Softmax). Also, to prove the usefulness
of the feature selection process using PCA+LDA pro-
posed in our approach, we compare the results to the
raw fused convolutional features without performing
feature selection (called as MLCF). Besides we sub-
stitute PCA+LDA by other feature selection methods,
namely PCA and NCA. Note that in this figure, we
use the abbreviation MLCF to refer to Multi-Layer
Convolutional Features.
As depicted in the figure, the effectiveness of fus-
ing results from multiple convolutional layers has
been demonstrated by obtaining higher accuracies on
the three datasets compared to the baseline method.
Moreover, the proposed feature selection step on the
fused convolutional features achieves the best perfor-
mance compared to the results without feature selec-
tion and to the results of other feature selection meth-
ods (namely PCA and NCA). The overall enhance-
ment of our proposed approach regarding the base-
line method is of 3%, 3.9% and 5.55% for the three
datasets, respectively. The main reason behind is that
the proposed approach has a higher generalization ca-
pability to better capture features at different abstrac-
tion levels. Also, the discriminative power of features
is enhanced by applying the feature selection step.
Finally, we list the classification accuracies of
the state-of-the-art methods FC-CNN (Cimpoi et al.,
2014) , FV-CNN (Cimpoi et al., 2015), B-CNN (Lin
and Maji, 2015), Deep-TEN (Zhang et al., 2017),
LFV-CNN (Song et al., 2017), and (Bu et al., 2019)
for texture classification on the same datasets in Ta-
ble 1. We consider in this comparison only recent
CNN-based methods since it has been demonstrated
in a recently published survey (Liu et al., 2019) that
they significantly outperform hand-crafted methods
for texture classification.
Table 1: Comparisons of the proposed method to the state-
of-the-art methods on the three datasets in terms of accu-
racy.
Method FMD DTD KTH-TIPS2
FC-CNN (Cimpoi et al., 2014) 69.3 59.5 71.1
FV-CNN (Cimpoi et al., 2015) 80.8 73.6 77.9
B-CNN (Lin and Maji, 2015) 81.6 72.9 77.9
Deep-TEN (Zhang et al., 2017) 80.2 - 82.0
LFV-CNN (Song et al., 2017) 82.1 73.8 82.6
(Bu et al., 2019) 82.4 71.1 76.9
Ours 84.8 74.41 81.17
From these comparisons, our proposed approach
has been experimentally validated showing more ac-
curate results against the recent state-of-the-art meth-
Multi-layer Feature Fusion and Selection from Convolutional Neural Networks for Texture Classification
579

1 2 3 4 5 6 7 8 9 10 11
Layers
30
40
50
60
70
80
90
100
Accuracy (%)
Max pooling
Avr pooling
(a) FMD dataset
1 2 3 4 5 6 7 8 9 10 11
Layers
30
40
50
60
70
80
90
100
Accuracy (%)
Max pooling
Avr pooling
(b) DTD dataset
1 2 3 4 5 6 7 8 9 10 11
Layers
30
40
50
60
70
80
90
100
Accuracy (%)
Max pooling
Avr pooling
(c) KTH-TIPS2 dataset
Figure 3: Results of different convolutional layers indexed from 1 (refers to ‘mixed0’) to 11 (refers to ‘mixed10’) from
Inception-v3 model on FMD, DTD and KTH-TIPS2 datasets in terms of classification accuracy. Comparisons between
maximum and average pooling operators are shown as well.
FMD DTD KTH-TIPS2
50
60
70
80
90
100
Accuracy (\%)
Baseline (Inception-v3)
MLCF
MLCF+PCA
MLCF+NCA
Ours (MLCF+PCA+LDA)
Figure 4: Comparisons of the proposed approach to: the
baseline architecture (Inception-v3 using Softmax), the
original fused multi-layer convolutional features (MLCF),
and other feature selection methods (PCA and NCA) on the
three experimented datasets in terms of classification accu-
racy. MLCF stands for Multi-Layer Convolutional Features.
ods for texture classification. Slightly lower re-
sults are noticed on KTH-TIPS2 dataset compared to
(Song et al., 2017; Zhang et al., 2017). This could
be explained by the fact that initial result from the
baseline architecture is relatively uncompetitive (only
75.62%), however the achieved enhancement is quite
important (about 6% in the classification accuracy).
One reason behind that could be the split of train/test
in this dataset in which only 25% of data is dedicated
for training.
5 CONCLUSION
In this paper, we presented our proposed approach
for texture classification based on encoding feature
vectors from multiple convolutional layers and fus-
ing them into a joint feature representation after ap-
plying a feature selection step. From the obtained
results using Inception-v3 as baseline architecture, it
has been demonstrated that the classification accu-
racy is significantly improved on three challenging
datasets. Furthermore, the results demonstrate the rel-
evance of the discriminant feature selection process.
Also, by means of comparisons to the state-of-the-art
methods better results are obtained. As perspectives,
the obtained results can be further enhanced using
more performing networks. Also, other applications
such as fine-grained classification and image retrieval
could be investigated using our proposed multi-layer
convolutional feature fusion and selection.
REFERENCES
Alkhatib, M. and Hafiane, A. (2019). Robust adaptive
median binary pattern for noisy texture classification
and retrieval. IEEE Trans Image Process, (11):5407–
5418.
Almakady, Y., Mahmoodi, S., Conway, J., and Bennett, M.
(2020). Rotation invariant features based on three di-
mensional gaussian markov random fields for volu-
metric texture classification. Computer Vision and Im-
age Understanding, 194.
Bu, X., Wu, Y., Gao, Z., and Jia, Y. (2019). Deep convo-
lutional network with locality and sparsity constraints
for texture classification. Pattern Recognition, 91.
Cimpoi, M., Maji, S., Kokkinos, I., Mohamed, S., and
Vedaldi, A. (2014). Describing textures in the wild.
In Proceedings of the 2014 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 3606–
3613.
Cimpoi, M., Maji, S., Kokkinos, I., and Vedaldi, A.
(2016). Deep filter banks for texture recognition, de-
scription, and segmentation. Int. J. Comput. Vision,
118(1):65–94.
Cimpoi, M., Maji, S., and Vedaldi, A. (2015). Deep filter
banks for texture recognition and segmentation. In
The IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Fradi, A., Samir, C., and Yao, A. (2018). Manifold-based
inference for a supervised gaussian process classifier.
In 2018 IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), pages 4239–
4243.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
580

J
´
egou, H., Douze, M., Schmid, C., and P
´
erez, P. (2010). Ag-
gregating local descriptors into a compact image rep-
resentation. In CVPR 2010 - 23rd IEEE Conference on
Computer Vision & Pattern Recognition, pages 3304–
3311.
Jolliffe, I. T. (2002). Principal component analysis. 2nd ed.
New-York: Springer-Verlag.
Jun, H., Ko, B., Kim, Y., Kim, I., and Kim, J. (2019). Com-
bination of multiple global descriptors for image re-
trieval. arXiv preprint arXiv:1903.10663.
Kordopatis-Zilos, G., Papadopoulos, S., Patras, I., and
Kompatsiaris, Y. (2017). Near-duplicate video re-
trieval by aggregating intermediate cnn layers. In Mul-
tiMedia Modeling, pages 251–263.
Lin, T.-Y. and Maji, S. (2015). Visualizing and understand-
ing deep texture representations. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2791–2799.
Lin, T.-Y., RoyChowdhury, A., and Maji, S. (2015). Bilin-
ear cnn models for fine-grained visual recognition. In
Proceedings of the 2015 IEEE International Confer-
ence on Computer Vision (ICCV).
Liu, L., Chen, J., Fieguth, P. W., Zhao, G., Chellappa, R.,
and Pietikainen, M. (2019). From bow to cnn: Two
decades of texture representation for texture classi-
fication. International Journal of Computer Vision,
127(1):74–109.
Mallikarjuna, P., Targhi, A. T., Fritz, M., Hayman, E., Ca-
puto, B., and Eklundh, J.-O. (2006). The kth-tips 2
database.
Nanni, L., Ghidoni, S., and Brahnam, S. (2017). Hand-
crafted vs. non-handcrafted features for computer vi-
sion classification. Pattern Recognition, 71:158 – 172.
Qu, Y., Lin, L., Shen, F., Lu, C. B., Wu, Y., Xie, Y., and
Tao, D. (2016). Joint hierarchical category structure
learning and large-scale image classification. IEEE
Transactions on Image Processing, 26:4331–4346.
Quan, Y., Xu, Y., Sun, Y., and Luo, Y. (2014). Lacunarity
analysis on image patterns for texture classification. In
2014 IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 160–167.
Schonberger, J. L., Hardmeier, H., Sattler, T., and Pollefeys,
M. (2017). Comparative evaluation of hand-crafted
and learned local features. In 2017 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 6959–6968.
Sharan, L., Rosenholtz, R., and Adelson, E. H. (2010). Ma-
terial perception: What can you see in a brief glance?
volume 14.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. in
Proc. Int. Conf. Learn. Representations.
Song, Y., Zhang, F., Li, Q., Huang, H., ODonnell, L. J.,
and Cai, W. (2017). Locally-transferred fisher vectors
for texture classification. In 2017 IEEE International
Conference on Computer Vision (ICCV), pages 4922–
4930.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. A.
(2017). Inception-v4, inception-resnet and the impact
of residual connections on learning. In Proceedings of
the Thirty-First AAAI Conference on Artificial Intelli-
gence. AAAI Press.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Computer Vision and Pattern Recognition (CVPR).
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the inception architecture for
computer vision. 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 2818–
2826.
Tzelepi, M. and Tefas, A. (2018). Deep convolutional learn-
ing for content based image retrieval. Neurocomput-
ing, 275:2467 – 2478.
Varma, M. and Zisserman, A. (2005). A statistical approach
to texture classification from single images. Interna-
tional Journal of Computer Vision, 62(1–2):61–81.
Wang, K., Bichot, C.-E., Li, Y., and Li, B. (2017). Local
binary circumferential and radial derivative pattern for
texture classification. Pattern Recogn., 67(C).
Yang, B., Yan, J., Lei, Z., and Li, S. Z. (2015). Convolu-
tional channel features for pedestrian, face and edge
detection. ICCV, abs/1504.07339.
Yang, W., Wang, K., and Zuo, W. (2012). Neighborhood
component feature selection for high-dimensional
data. JCP, 7:161–168.
Yang Song, Weidong Cai, Qing Li, Fan Zhang, Feng, D. D.,
and Huang, H. (2015). Fusing subcategory probabil-
ities for texture classification. In 2015 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 4409–4417.
Zhang, H., Xue, J., and Dana, K. (2017). Deep ten: Tex-
ture encoding network. In The IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Zheng, L., Zhao, Y., Wang, S., Wang, J., and Tian, Q.
(2016). Good practice in CNN feature transfer. CoRR,
abs/1604.00133.
Multi-layer Feature Fusion and Selection from Convolutional Neural Networks for Texture Classification
581
