
Link Prediction for Wikipedia Articles based on Temporal Article
Embedding
Jiaji Ma and Mizuho Iwaihara
Graduate School of Information, Production and Systems, Waseda University, Japan
Keywords:
Graph Embedding, Link Prediction, Temporal Random Walk.
Abstract:
Wikipedia articles contain a vast number of hyperlinks (internal links) connecting subjects to other Wikipedia
articles. It is useful to predict future links for newly created articles. Suggesting new links from/to existing
articles can reduce editors’ burdens, by prompting editors about necessary or missing links in their updates.
In this paper, we discuss link prediction on linked and versioned articles. We propose new graph embeddings
utilizing temporal random walk, which is biased by timestamp difference and semantic difference between
linked and versioned articles. We generate article sequences by concatenating the article titles and category
names on each random walk path. A pretrained language model is further trained to learn contextualized
embeddings of article sequences. We design our link prediction experiments by predicting future links between
new nodes and existing nodes. For evaluation, we compare our model’s prediction results with three random
walk-based graph embedding models DeepWalk, Node2vec, and CTDNE, through ROC AUC score, PRC
AUC score, Precision@k, Recall@k, and F1@k as evaluation metrics. Our experimental results show that our
proposed TLPRB outperforms these models in all the evaluation metrics.
1 INTRODUCTION
Wikipedia is now one of the most popular multilin-
gual online encyclopedias all over the world (Zesch
et al., 2007). A large number of volunteers actively
create and edit articles to expand shared knowledge.
Wikipedia editors keep modifying articles reflecting
significant topics and improving quality through var-
ious maintenance tasks. Updating an article creates a
timestamped version of the article. Wikipedia article
links are essential for readers to find relevant articles
via navigation. Also, the link structure of Wikipedia
is a prime source of knowledge graphs. Since arti-
cles are newly created and updated, system-support
for suggesting new links from/to existing articles is
necessary to reduce editors’ burdens.
Figure 1 shows an example of an internal link. The
article “COVID-19 pandemic”contains the phrase
“infection fatality rate,” which is linked to one section
of another Wikipedia article “Case fatality rate.”
Categories in Wikipedia play an important role in
classifying articles into multiple hierarchies of diverse
topics. Properly assigning categories to newly created
articles is also an important but costly task for human
editors.
The evolutional aspect of internal links of
Wikipedia can be modeled as a temporal link graph,
Figure 1: Example of Wikipedia internal link.
which is a series of graphs where nodes represent ar-
ticles, and edges represent links, and each graph is
indexed by a timestamp. In this paper, we discuss a
new method for predicting links between newly added
articles and existing articles. The temporal link graph
of Wikipedia shows the following characteristics: 1)
The number of articles of hot topics is mostly con-
tinuously growing. 2) New articles are likely to be
linked to other articles under a common category. 3)
New links are more likely to be created between two
articles having a high semantic similarity.
We dicuss link prediction based on temporal graph
embeddings which can extract temporal, structural
and semantical similarities of linked articles, which
have not been considered in existing temporal/non-
Ma, J. and Iwaihara, M.
Link Prediction for Wikipedia Articles based on Temporal Article Embedding.
DOI: 10.5220/0010639900003064
In Proceedings of the 13th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2021) - Volume 1: KDIR, pages 87-94
ISBN: 978-989-758-533-3; ISSN: 2184-3228
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
87

temporal link predictions. Major contributions of this
paper are summarized below:
• We propose temporal link prediction methods
based on new node embeddings that consist of two
temporal random walk strategies: Random walk
biased by similarity on common categories and
random walk biased by semantic similarity.
• For temporal random walk biased by semantic
similarity, we propose generating node embed-
dings from token sequences of article texts along
walk paths. We utilize two document embed-
ding methods: FastText (Bojanowski et al., 2017)
with character n-gram and further pre-training of
RoBERTa (Liu et al., 2019).
• Our proposed algorithms are evaluated on real
temporal link graphs extracted from Wikipedia
dump, consisting of article sets on three topics
from January 1st to July 20th, 2020. Our rig-
orous evaluations on prediction accuracy show
that our proposed RoBERTa-based method out-
performs major link prediction algorithms.
The rest of this paper is organized as follows. Sec-
tion 2 covers related work. Section 3 defines our tem-
poral link prediction task. Section 4 shows the pro-
posed methods. Section 5 explains experimental de-
signs and evaluation results. Section 6 concludes this
paper.
2 RELATED WORK
The survey (Yue et al., 2020) covers link prediction
methods based on graph embeddings. Graph embed-
ding methods can be grouped into three categories:
Matrix factorization-based, random walk-based, and
neural network-based methods. After obtaining node
embeddings, the downstream prediction tasks in these
categories are basically the same.
DeepWalk (Perozzi et al., 2014) learns latent rep-
resentations of nodes in a network. Given a current
start node, DeepWalk randomly samples a node from
its neighbors as the next visit node and repeats this
process until the visit sequence length meets a preset
condition. After obtaining a sufficient number of node
walking sequences, SkipGram is applied to generate
node embeddings.
Node2vec (Grover and Leskovec, 2016) learns a
mapping of nodes to a low-dimensional space of fea-
tures that maximizes the likelihood of preserving net-
work neighborhoods of nodes. Node2vec uses a bi-
ased random walk, which sets two hyperparameters p
and q to control the strategy of the random walk. Af-
ter sampling node sequences, the remaining steps are
the same with DeepWalk.
The in-depth survey (Divakaran and Mohan,
2019) of temporal link prediction shows comparisons
of the following embedding-based temporal link pre-
diction algorithms. CTDNE (Nguyen et al., 2018) uti-
lizes continuous-time dynamic network embedding to
address the problem of learning an appropriate net-
work representation for improving the accuracy of
predictive models. They extend the definition of static
graph random walk to temporal graph random walk
and propose several effective biased random walk
strategies.
DynamicTriad (Zhou et al., 2018) preserves struc-
tural information and evolution patterns of a given
network. The general idea of the model is to impose a
triad to model the dynamic changes of network struc-
tures. They model how a closed triad develops from
an open triad, which is called a triad closure process
and is a fundamental mechanism in the formation and
evolution of dynamic networks.
DynGEM (Goyal et al., 2018) employs a deep au-
toencoder as its core and leverages the advances in
deep learning to generate highly non-linear embed-
dings. The major advantages of DynGEM include:
The embeddings are stable over time, can handle
newly added nodes in dynamic graphs, and has bet-
ter running time than using static embedding methods
on each snapshot of a series of dynamic graphs.
A crucial problem of the above methods is that
their embeddings are intended to preserve link neigh-
borhoods, but deep features nodes are representing,
such as semantic similarities, are not considered. If a
node represents an article, link neighbors as well as
semantic neighbors can be useful for the link predic-
tion task. Since Wikipedia articles are texts, we ar-
gue that semantic similarity measured on representa-
tive parts of article texts, such as titles and categories,
can be exploited for this task. Thus, we discuss graph
embeddings that can reflect both link structures and
textual similarities between nodes.
3 OBJECTIVES AND
PRELIMINARIES
Given a series of graph snapshots [G
0
, G
1
, ..., G
T −1
],
where suffix obeys timestamp order, our goal is to pre-
dict links between new nodes in the next graph G
T
and nodes existing before T. Each node in each graph
snapshot has two attributes; one is a word sequence
called article text, and the other is a set of word se-
quences called category. The article texts and cate-
gories of nodes may also change between snapshots.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
88

Figure 2 left (Snapshots) illustrates our objectives.
Since new articles are constantly created, we aim to
predict new links between newly added articles (the
orange node at t = 2) and existing articles in the last
graph G
T
.
For convenience, we unify the series of graph
snapshots [G
0
, G
1
, ..., G
T
] into one temporal (multi-)
graph G = (V, E), where N is a set of nodes corre-
sponding to a subset of Wikipedia articles. Let E be
the set of edges, representing Wikipedia article links,
where each link e
i
= (u, v,t
s
) ∈ E means that there is
a link from node u to node v at time t
s
.
Figure 2 right shows an example of a unified tem-
poral graph G = (V, E). The light blue node has an
edge to the purple node at timestamps t = 1 and t = 2.
After unifying the snapshots, the light blue node will
have two edges directed to the purple node, where the
edges are labeled with timestamps 1 and 2.
Figure 2: Example of generating the temporal graph.
The set of temporal neighbors of a node v at
time t
s
is defined as Γ
t
s
(v) = {(w, t
0
) | ∃e = (v, w, t
0
) ∈
E such that T (e) > t
s
}, where t
0
= T (e) is the times-
tamp of edge e.
4 METHODOLOGIES
Our method consists of three main parts: Temporal
random walk, learning node (article) embeddings, and
link prediction. After article embeddings are gener-
ated, a conventional link prediction method is applied.
4.1 Article Sequences
The random walk part has two steps. Step 1 is select-
ing an initial random walk edge, and Step 2 is exe-
cuting temporal random walks. For Step 1, we pro-
pose a biased strategy for edge selection. For Step
2, we propose two strategies, which are random walk
by common categories and random walk by semantic
similarity.
After one random walk is executed, the walk path
shows a node sequence, from which we can gener-
ate an article sequence, which is the concatenation
of the article texts along the walk path. The article
sequences are utilized as sentences for training node
embeddings.
Since typical Wikipedia articles are quite long and
complex, we should extract important article compo-
nents that are useful for link prediction. The follow-
ing article components are well summarizing topics
of one article or one link, thus suitable as article texts:
(1) article title, (2) leading k tokens of the article, (3)
category names, (4) the title of a link, and (5) the
text around the target of a link. Considering random
walk length and the length limit of 512 tokens of the
BERT/RoBERTa encoder, for article texts we choose
(1) article title and (3) category names, which are rep-
resenting the topics of one article than the other article
components.
4.2 Random Walk Strategies
4.2.1 Initial Edge Selection
Given a temporal graph G = (V, E), we first need to
select an edge as the initial edge of a random walk.
To deal with this problem, we utilize temporal bias in
sedge election (Nguyen et al., 2018), such that each
edge is given a weight according to freshness of its
timestamp. Specifically, each weight is given by a
softmax function on the exponential distribution of
timestamp decay. Each edge e
i
= (u, v, t
s
) ∈ E is as-
signed with the following probability:
Pr(e
i
) =
e
(T (e
i
)−t
min
)
∑
e
0
∈E
e
(T (e
0
)−t
min
)
(1)
where t
min
is the minimum edge timestamp in graph
G, and T (e
i
) denotes the timestamp of edge e
i
. The
above defines a distribution that heavily favors edges
appearing later in time.
4.2.2 Temporal Random Walk
After selecting an initial edge e
i
= (u, v,t
s
) at time t
s
for initiating a temporal random walk, we need to se-
lect the next node to visit by the random walk. The
main principle of our temporal random walk is that
the timestamp of the next edge must not be less than
the current time.
We design two techniques to bias temporal ran-
dom walks by sampling the next node via calculat-
ing each neighbor probability based on common cat-
egories (Section 4.2.3) and semantic similarity (Sec-
tion 4.2.4).
We generate an article sequence along each ran-
dom walk path. For example, when walking to node
v at timestamp t
s
, we append the article text (Sec-
tion 4.1) of v into the article sequence of the ran-
Link Prediction for Wikipedia Articles based on Temporal Article Embedding
89

dom walk until the walk length reaches the max walk
length.
4.2.3 Random Walk by Common Categories
Figure 3 shows a partial list of categories in
Wikipedia
1
.
2020 United States presidential election, Donald
Trump 2020 presidential campaign, Donald Trump,
Mike Pence, Joe Biden 2020 presidential campaign,
Joe Biden, Kamala Harris
Figure 3: Categories of article 2020 United States Presiden-
tial Election (partial).
The degree of common categories can be mea-
sured by the Jaccard coefficient of the current node’s
categories and the next neighbor node’s categories:
Jaccard(v, w, t
s
, T (w)) =
|n
cat
v
(t
s
) ∩ n
cat
w
(T (w))|
|n
cat
v
(t
s
) ∪ n
cat
w
(T (w))|
(2)
where n
cat
v
(t
s
) represents the categories of article v at
timestamp t
s
, and n
cat
w
(T (w)) represents the categories
of a candidate article w at timestamp T (w). Symbols
“∩” and “∪,” respectively, denote the intersection and
union of two article categories, respectively, where
the exact category names are used as identifiers. Sym-
bol | · | is the number of categories in this set.
We define the probability of selecting node v’s
temporal neighbor w ∈ Γ
t
s
(v) as:
Pr(w) =
e
T (w)−t
s
+λ×Jaccard(v,w,t
s
,T (w))
∑
w
0
∈Γ
t
s
(v)
e
T (w
0
)−t
s
+λ×Jaccard(v,w
0
,t
s
,T (w
0
))
(3)
The difference T (w) −t
s
is the time span between
the current timestamp t
s
and the next link’s timestamp
T (w). λ is a hyperparameter to control the influence
of time span bias and common categories bias.
4.2.4 Random Walk by Semantic Similarity
Another bias strategy for the temporal random walk
is to consider semantic similarity between two nodes,
which can be measured by cosine similarity on docu-
ment embeddings of two nodes. We generate the em-
bedding vector of node v from its article sequence,
by utilizing the pretrained language model RoBERTa
(Liu et al., 2019), which is an improved version of
the pretrained language model BERT. Compared with
BERT (Devlin et al., 2019), RoBERTa uses dynamic
masking and byte-level BPE (Byte-Pair Encoding),
where BPE can cope with out-of-vocabulary words
by subword decomposition.
1
https://en.wikipedia.org/wiki/2020 United States
presidential election
To generate node embeddings Emb(v) by
RoBERTa, we enter the article sequence of v into
RoBERTa, where the article sequence is truncated
to fit into the length limitation of 512 tokens of
RoBERTa. The output at < s > token is a 768-
dimensional vector, which can be used as the node
(article) embedding.
Now suppose our current node of a random walk
is v, and one candidate neighbor is node w. We in-
troduce the following probability function combining
time decay and semantic similarity, for the probability
of walking to this candidate node w.
Pr(w) =
e
T (w)−t
s
+α×cosine(Emb(v),Emb(w))
∑
w
0
∈Γ
t
s
(v)
e
T (w
0
)−t
s
+α×cosine(Emb(v),Emb(w
0
))
(4)
Here, t
s
is the current timestamp, and T (w) is the
timestamp of edge (v, w). T (w) − t
s
is the time dif-
ference of the current timestamp t
s
and the next link’s
timestamp T (w). α is a hyperparameter to control the
weight of timestamp difference and semantic similar-
ity of articles.
4.3 Learning Node Embeddings
In this paper, we propose training of node embed-
dings from article sequences collected along random
walk paths, so that semantic neighbors and link neigh-
bors are smoothly integrated into a single embedding
space.
In Section 4.2.4, document embedding Emb(v)
from the article text of a node v was introduced.
However, for temporal link prediction we introduce
different node embeddings, denoted as Emb
TC
(v[t])
for the embedding of node v at timestamp t. Node
embeddings Emb
TC
(v[t]) are trained from article se-
quences along temporal random walk paths, so that
temporal, structural, and semantic similarities are
smoothly integrated into a single node representa-
tion. We consider two embedding algorithms, Fast-
Text (Bojanowski et al., 2017) and further pre-training
of RoBERTa for training of Emb
TC
(v[t]).
4.3.1 FastText with Character N-gram
The word embedding model word2vec does not dis-
tinguish the words “apple” and “apples.” To over-
come this problem, FastText (Bojanowski et al., 2017)
uses a bag of character-level n-grams to represent a
word. For the word “apple,” suppose the value of n
is 3, then its trigram decomposition is “<ap,” “app,”
“ppl,” “ple,” “le>.” Thus, we can represent the word
vector of “apple” by superimposing the vectors of the
five trigrams.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
90
In temporal random walk, we generate article se-
quences by concatenating article texts along each
walk path. Then we apply FastText with character
n-gram to train embeddings from these article se-
quences.
4.3.2 Further Pretraining of RoBERTa by
Article Sequences
We can construct a corpus consisting of the sentences
where each sentence corresponds to the article se-
quence along each temporal random walk path. Then
on this corpus, we perform further pre-training of
RoBERTa by the Masked Langrage Model (MLM),
such that word tokens are generated by the RoBERTa
tokenizer with byte-pair encoding, and dynamically
mask randomly selected tokens in each input se-
quence with a special token [MASK]. The objective
of MLM is the cross-entropy loss on predicting the
masked tokens.
By the above further pretraining on the corpus,
the RoBERTa model will learn contextualized embed-
dings of article sequences. In our case, the RoBERTa
model will produce embeddings Emb
TC
(v[t]) such
that texts appearing in link neighbors of v will have
higher similarities with Emb
TC
(v[t]) than texts that
are remote from v in the temporal link graph.
4.4 Two Link Prediction Methods
Since our targets are directed graphs, following
(Crichton et al., 2018), we adopt the concatenation
method to construct the feature vector of each directed
edge. Given a link from u to v at time t, we obtain
Emb
TC
(u[t]) and Emb
TC
(v[t]), namely the embed-
dings of the article sequences of nodes u and v at time
t. Then the concatenation [Emb
TC
(u[t]), Emb
TC
(v[t])]
of these embeddings is used as the feature vector of
the link from u to v. Temporal link prediction is per-
formed by a logistic regression classifier on the fea-
ture vectors regarding a target article node.
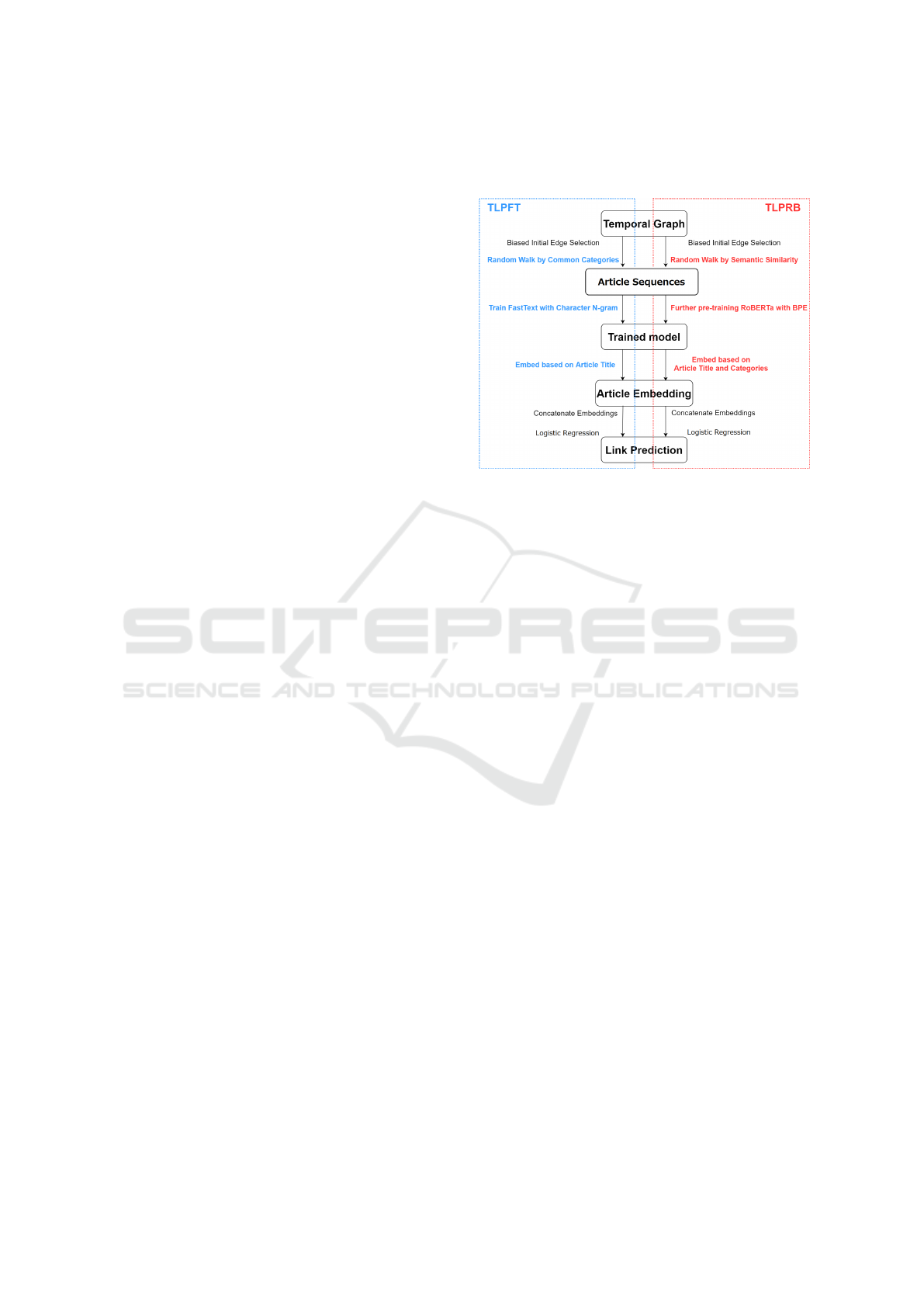
We summarize our proposed temporal link pre-
diction methods into TLPFT and TLPRB. TLPFT
(Temporal Link Prediction with FastText) is the
method with the biased initial edge selection strat-
egy (1), random walk with common categories (3),
and learning node embeddings through FastText with
character n-grams.
TLPRB (Temporal Link Prediction with
RoBERTa) is the method with the biased initial
edge selection strategy (1), random walk by semantic
similarity (4), and learning node embeddings through
further pre-training RoBERTa by article sequences
along walk paths. Then we apply these embeddings
for link prediction in the same way.
Figure 4 contrasts the differences between TLPFT
and TLPRB.
Figure 4: Pipelines of TLPFT and TLPRB.
5 EXPERIMENTS
5.1 Datasets
Now we describe the construction of our evaluation
datasets, which are sampled from Wikimedia dump.
The time span from 2020-01-01 to 2020-07-20 is ex-
tracted, consisting of thirteen snapshots in the English
Wikipedia server.
We select three topics: 2020 Protests, 2020
United States Presidential Election, COVID-19
Pandemic, and extract all the articles in these top-
ics from each snapshot in the Wikimedia dump. We
extracted three types of information for building our
temporal graph: The title of each article at each times-
tamp, the category lists of each article at each times-
tamp, and the hyperlinks between all the articles at
each timestamp.
The detailed descriptions of our three datasets are
summarized in Table 1. Each row of the table cor-
responds to a timestamp. The columns Nodes and
Edges, respectively, are the numbers of nodes and
edges, respectively, of the graph at each timestamp.
5.2 Baseline Models
As our baseline models, we choose the following
three graph embedding algorithms which are also
based on random walk:
• DeepWalk (Perozzi et al., 2014): This model is a
basic random walk graph embedding method that
can be applied for a directed or undirected un-
Link Prediction for Wikipedia Articles based on Temporal Article Embedding
91

Table 1: Statistics of the three datasets.
2020 Protests
2020 U.S.
Presidential
Election
COVID-19 Pandemic
Nodes Edges Nodes Edges Nodes Edges
Jan.1 676 19456 1220 90465 1778 17890
Jan.20 695 20786 1226 93924 1853 18982
Feb.1 704 21286 1229 95755 1911 19876
Feb.20 712 21896 1245 98824 2040 22456
Mar.1 715 22009 1250 99800 2120 25486
Apr.1 726 22523 1276 102608 2759 208020
Apr.20 731 22610 1296 105270 3006 276751
May.1 733 23140 1303 106657 3127 314667
May.20 739 24424 1311 108050 3278 367660
Jun.1 768 25604 1314 108421 3351 382105
Jun.20 925 43502 1322 108704 3431 405540
Jul.1 951 51982 1331 110250 3471 429762
Jul.20 976 55594 1342 112344 3554 456680
weighted graph. However, temporal information
is not utilized by DeepWalk.
• Node2vec (Grover and Leskovec, 2016): This
model introduces two hyperparameters p and q
for a biased random walk. Parameter p controls
the probability of repeating the node just visited,
and parameter q controls whether the walk is out-
ward or inward on edge direction. Node2vec also
does not consider temporal information.
• CTDNE (Nguyen et al., 2018): This model is de-
signed for temporal graph embedding. CTDNE
provides three temporal random walk strategies,
which are uniform, exponential, and linear.
We choose two versions of the original CTDNE
model, in terms of temporal random walk strategies
for bias on initial edge selection and bias on neighbor
edge selection, denoted as CTDNE (none-none) and
CTDNE (none-exponential).
CTDNE can deal with temporal graphs, but Deep-
Walk and Node2vec are applicable for static graphs.
To make the results more descriptive, we unify all
the graphs in the training set into one graph and ap-
ply DeepWalk and Node2vec on this unified graph for
static link prediction.
For comparison, we set the random walk parame-
ters of all models to be the same. Table 2 shows the
parameter values used in the experiments. To show
the effectiveness of further pre-training RoBERTa by
article sequences, we added a new comparative model
RoBERTa Embedding that just uses the pre-trained
RoBERTa for obtaining node embeddings from arti-
cle sequences, without further pretraining by MLM.
5.3 Design of Experiments
For evaluating prediction results, we adopt AUC
(Area Under the Curve) of ROC, which is one of
Table 2: Parameter values of radom walk.
Parameter Description Value
window size used for the SkipGram al-
gorithm
5
walk length max random walk path
length
20
num walks how many times random
walk start per node
30
embedding
size
graph embedding vector
dimension
768
p used for random walk bias
strategy in Node2vec
2
q used for random walk bias
strategy in Node2vec
0.5
the most important evaluation metrics for checking
any classification model’s performance (Yang et al.,
2015), where a higher AUC score means better pre-
diction performance.
We also measure Precision@k, Recall@k, and
F1@k, which respectively mean precision, recall, and
F1-score on the top-k links predicted by a method.
The micro-averages of these metrics on the test nodes
are shown.
Figure 5 illustrates the split of the test and train-
ing sets in our experiments. The construction of the
training and test link sets is as follows. The newly
added links at the last timestamp (July 20th) are held
out as the test link set. The remaining links in the last
timestamp, and all the links in the preceeding times-
tamps, where the test link set is excluded, constitute
the training link sets. Biased temporal random walk
is carried out on the training link set, and article se-
quences along the walk paths are extracted for train-
ing node embeddings by our TLPFT or TLPRB.
We use the concatenation method to generate edge
features, and label them with 1 or 0 based by whether
there is a directed link.
Finally, we use logistic regression as a classifier
for link prediction. The evaluation metrics are ROC
AUC score, PRC AUC score, and micro–averages of
Precision@K, Recall@K, and F1@K.
The number of node pairs in the training and test-
ing datasets are shown in Table 3.
Table 3: Number of node pairs in train and test datasets.
Dataset Node Pairs in
Training Set
Node Pairs in
Test Set
2020 Protests 107228 48231
2020 United Presi-
dential Election
222812 29383
COVID-19 Pan-
demic
877544 582975
The random walk of DeepWalk and Node2vec
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
92
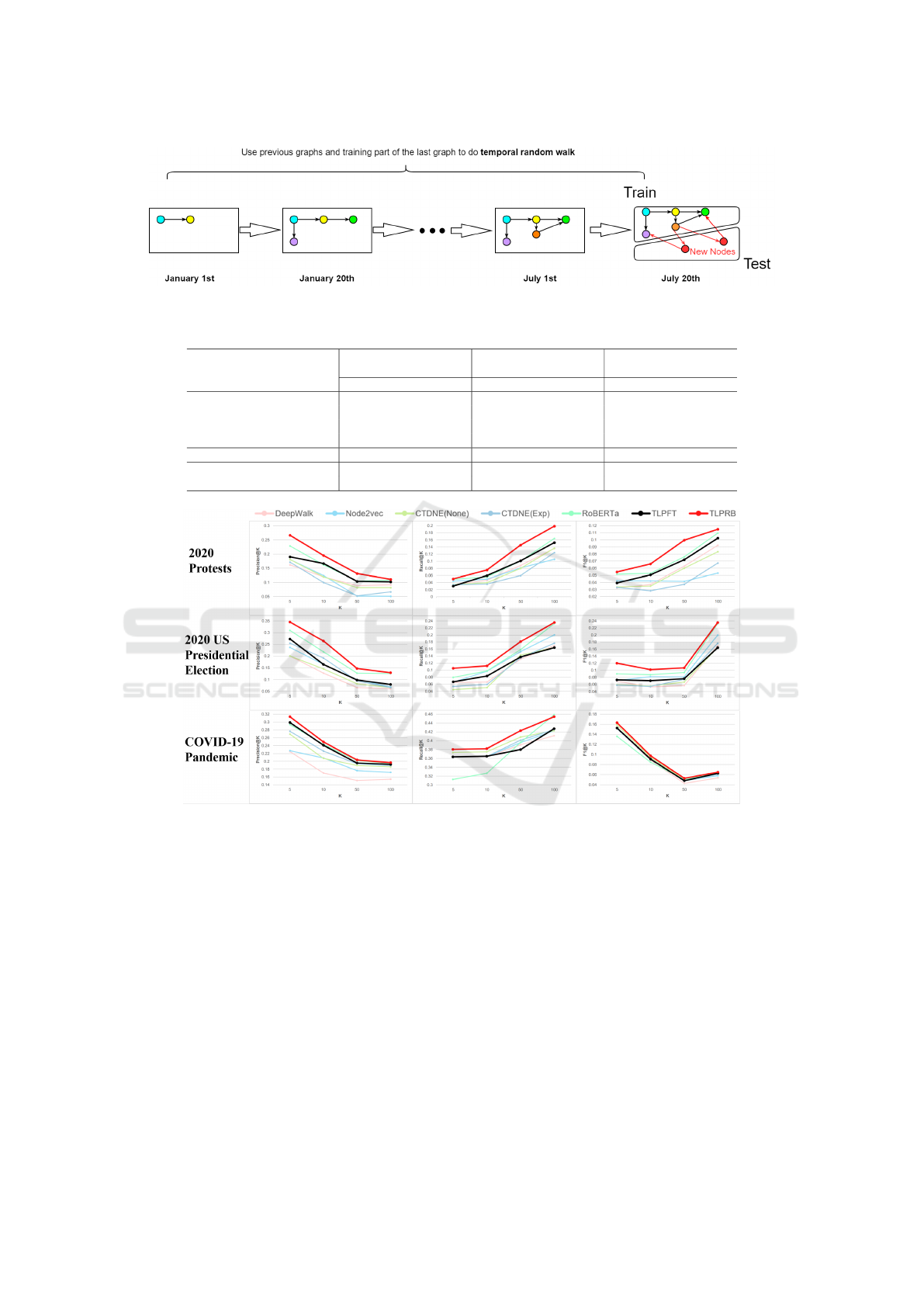
Figure 5: Split of train and test link sets.
Table 4: Experimental results on three datasets.
Methods
2020 Protests
2020 United States
Presidential Election
COVID-19 Pandemic
ROC AUC PRC AUC ROC AUC PRC AUC ROC AUC PRC AUC
DeepWalk 0.712 0.111 0.661 0.046 0.921 0.378
Node2vec 0.719 0.118 0.69 0.058 0.938 0.461
CTDNE(None-None) 0.727 0.1 0.727 0.092 0.926 0.488
CTDNE(None-Exponential) 0.725 0.098 0.725 0.063 0.918 0.379
RoBERTa Embedding 0.759 0.095 0.756 0.089 0.977 0.574
TLPFT 0.773 0.115 0.773 0.088 0.976 0.594
TLPRB 0.791 0.12 0.79 0.105 0.981 0.678
Figure 6: Micro-averaged Precision@k, Recall@k, and F1@k on three datasets.
needs to reach newly created nodes, to learn structure
information of the new nodes. So 1% of randomly se-
lected edges in the training set are allocated to the new
nodes, and each non-isolated new node is assigned at
least one adjacent edge.
The parameters p and q of the walking strategy
in DeepWalk are fixed to 1, while for Node2vec grid
search is used to find the best combination of param-
eters p and q from 0.25, 0.5, 1, 2, 4.
5.4 Experimental Results and Analysis
Table 4 shows the ROC AUC and PRC AUC scores
of the models on the three datasets.
As shown in the above experimental results, we
can draw the following conclusions.
Node2vec is better than DeepWalk in all the cases,
but CTDNE is better than the static graph embed-
ding methods DeepWalk and Node2vec. One rea-
son is that CTDNE learns temporal evolution pat-
tern of link structure through temporal random walk.
The pre-trained RoBERTa model was trained by raw
English Wikipedia articles (Liu et al., 2019). So,
RoBERTa Embedding can appropriately produce em-
bedding vectors of articles. The results indicate that
temporal random walk coupled with semantic simi-
larity is showing an apparent improvement over the
three graph embedding models.
As for our proposed models, the results show that
both TLPFT and TLPRB outperform the baselines
Link Prediction for Wikipedia Articles based on Temporal Article Embedding
93

by a significant margin. By comparing TLPRB and
RoBERTa Embedding, it can be seen that further pre-
training RoBERTa by MLM on article sequences is
significantly improving the performance, indicating
that TLPRB is learning contexutality in sequences of
titles and category names, which benefits prediction
of neighboring new nodes.
TLPFT is better than the baseline models, indi-
cating that semantic similarity captured by FastText,
which is capable of embedding out-of-vocabulary
words in article texts by k-gram decomposition, and
TLPFT is even surpassing RoBERTa Embedding.
However, TLPFT is not as effective as TLPRB, in-
dicating that embeddings of FastText do not capture
contexts in article sequences, while TLPRB is further
pretrained by a large number of article sequences, to
learn semantic similarity and contextual relationship
between neighboring articles.
Figure 6 shows micro-averaged Precision@k, Re-
call@k, and F1@k curves with k=5, 10, 50, 100
on the three datasets. Combining the results on the
aggregated performance by the AUC scores and the
ranking performance by the Top-K results, our overall
conclusion is that TLPRB performs best in both AUC
and Top-K evaluations, and TLPFT performs the next
in the AUC evaluation.
6 CONCLUSION AND FUTURE
WORK
In this paper, we proposed a new method for predict-
ing article links in Wikipedia, which utilizes tempo-
ral random walk to generate graph embeddings. Our
graph embedding model is based on temporal random
walk, biased by temporal feature and semantic rela-
tionships of article texts between node pairs. We eval-
uated on three temporal graph datasets extracted from
Wikipedia dump. Our experimental results show that
our proposed model TLPRB outperforms the base-
lines and simple RoBERTa-based model in this tem-
poral link prediction on versioned articles.
For future work, we consider that the current defi-
nition of common categories is based on identical cat-
egory names. Semantic similarity and hierarchical re-
lationships between categories can be explored.
REFERENCES
Bojanowski, P., Grave, E., Joulin, A., and Mikolov, T.
(2017). Enriching word vectors with subword infor-
mation. Transactions of the Association for Computa-
tional Linguistics, 5:135–146.
Crichton, G., Guo, Y., Pyysalo, S., and Korhonen, A.
(2018). Neural networks for link prediction in realis-
tic biomedical graphs: a multi-dimensional evaluation
of graph embedding-based approaches. BMC bioin-
formatics, 19(1):1–11.
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K.
(2019). BERT: Pre-training of deep bidirectional
transformers for language understanding. In Proceed-
ings of the 2019 Conference of the North American
Chapter of the Association for Computational Lin-
guistics: Human Language Technologies, Volume 1
(Long and Short Papers), pages 4171–4186.
Divakaran, A. and Mohan, A. (2019). Temporal link pre-
diction: a survey. New Generation Computing, pages
1–46.
Goyal, P., Kamra, N., He, X., and Liu, Y. (2018). Dyngem:
Deep embedding method for dynamic graphs. arXiv
preprint arXiv:1805.11273.
Grover, A. and Leskovec, J. (2016). node2vec: Scal-
able feature learning for networks. In Proceedings
of the 22nd ACM SIGKDD international conference
on Knowledge discovery and data mining, pages 855–
864.
Liu, Y., Ott, M., Goyal, N., Du, J., Joshi, M., Chen, D.,
Levy, O., Lewis, M., Zettlemoyer, L., and Stoyanov,
V. (2019). Roberta: A robustly optimized bert pre-
training approach. arXiv preprint arXiv:1907.11692.
Nguyen, G. H., Lee, J. B., Rossi, R. A., Ahmed, N. K., Koh,
E., and Kim, S. (2018). Continuous-time dynamic net-
work embeddings. In Companion Proceedings of the
The Web Conference 2018, pages 969–976.
Perozzi, B., Al-Rfou, R., and Skiena, S. (2014). Deepwalk:
Online learning of social representations. In Proceed-
ings of the 20th ACM SIGKDD international confer-
ence on Knowledge discovery and data mining, pages
701–710.
Yang, Y., Lichtenwalter, R. N., and Chawla, N. V. (2015).
Evaluating link prediction methods. Knowledge and
Information Systems, 45(3):751–782.
Yue, X., Wang, Z., Huang, J., Parthasarathy, S., Moosav-
inasab, S., Huang, Y., Lin, S. M., Zhang, W., Zhang,
P., and Sun, H. (2020). Graph embedding on biomed-
ical networks: methods, applications and evaluations.
Bioinformatics, 36(4):1241–1251.
Zesch, T., Gurevych, I., and M
¨
uhlh
¨
auser, M. (2007). An-
alyzing and accessing wikipedia as a lexical seman-
tic resource. Data Structures for Linguistic Resources
and Applications, 197205.
Zhou, L., Yang, Y., Ren, X., Wu, F., and Zhuang, Y. (2018).
Dynamic network embedding by modeling triadic clo-
sure process. In Proceedings of the AAAI Conference
on Artificial Intelligence, volume 32.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
94
